1.本发明公开一种无人机机载任务管理器实现装置,涉及无人机技术领域。
背景技术:
2.随着电子技术的飞速发展,无人机已经应用到生产、生活的各个领域。大部分的无人机系统都有多个单元模块组成,包括飞行控制单元、光电单元、地面控制单元等,特种领域的无人机还可能包括武器打击单元等。无人机运行的时候,需要多个单元之间互相协调,这就需要一个能够实现多个单元通信,并且能够进行多任务规划的一个机载机载任务管理器。
3.故现发明一种无人机机载任务管理器实现装置,已解决上述问题。
技术实现要素:
4.本实用发明针对现有技术的问题,提供一种无人机机载任务管理器实现装置,所采用的技术方案为:一种无人机机载任务管理器实现装置,所述的装置具体包括地面控控制单元、机载数据链、机载机载任务管理器、飞行控制单元和光电单元;
5.所述地面控制单元通过机载数据链通信连接机载机载任务管理器,机载机载任务管理器同时与飞行控制单元和光电单元通信连接;
6.所述机载数据链、机载机载任务管理器、飞行控制单元和光电单元均搭载于无人机中。
7.所述地面控制单元采用单点控制地面站,控制无人机的开关机、充电,预先设置飞行路线。
8.所述机载数据链具体包括上行链路和下行链路;
9.上行链路实现地面控制单元到无人机遥控指令的发送和接收;
10.下行链路完成无人机到地面控制单元的遥测数据和视频图像的发送和接收。
11.所述机载机载任务管理器采用xilinx的zynq
‑
7000 fpga芯片实现。
12.所述飞行控制单元具体包括导航子系统和飞控子系统;
13.导航子系统引导无人机进行飞行任务,飞控子系统对无人机进行权限控制与管理。
14.所述光电单元搭载可见光相机、红外摄像机和激光测距仪。
15.所述fpga芯片包括uart transceiver模块、data control模块、arm模块和memory controlor模块。
16.本发明的有益效果为:本发明装置通过地面控制单元通信类连接机载数据链,机载数据链通过机载机载任务管理器实现飞行控制单元和光电单元之间的数据、命令通信、并通过机载机载任务管理器实现数字图像的预处理和边缘计算,实现边缘计算算法的硬件加速。
附图说明
17.为了更清楚地说明本实用发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
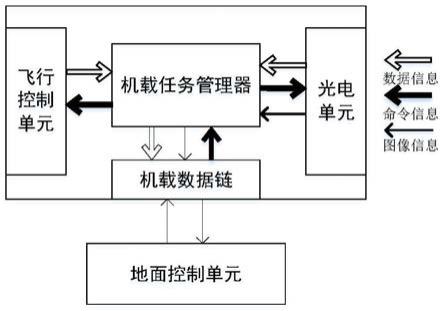
18.图1是本发明装置的结构示意图;图2是本发明装置中机载机载任务管理器的结构示意图。
具体实施方式
19.下面结合附图和具体实施例对本实用发明作进一步说明,以使本领域的技术人员可以更好地理解本实用发明并能予以实施,但所举实施例不作为对本实用发明的限定。
20.一种无人机机载任务管理器实现装置,所述的装置具体包括地面控控制单元、机载数据链、机载机载任务管理器、飞行控制单元和光电单元;
21.所述地面控制单元通过机载数据链通信连接机载机载任务管理器,机载机载任务管理器同时与飞行控制单元和光电单元通信连接;
22.所述机载数据链、机载机载任务管理器、飞行控制单元和光电单元均搭载于无人机中;
23.针对目标检测无人机,本发明设计了一种无人机机载任务管理器实现装置,本发明装置的结构图如图1所示,机载机载任务管理器是本专发明装置的重要实现的部分,是无人机的中央枢纽,实现飞行控制单元、光电单元、地面控制单元之间的数据和命令通信,并对光电单元采集到的图像信息进行预先边缘检测处理,整个过程包括图像的读取、存储,高斯滤波,梯度的幅值和方向计算,边缘检测等,处理过后的图像占用数据资源大大减小,传回地面进行持续优化;对于无法确定的目标,将图像传回地面控制中心,进行进一步的分析,并将分析结果实时反馈给无人机,通过改变无人机的行进方式,或者变换光电传感器角度来完成目标检测任务;
24.地面控制单元发送开机命令,启动机载机载任务管理器加载程序后开始运行;机载机载任务管理器通过串口接收地面控制单元的命令信息,并根据协议分发给飞行控制单元和光电单元;飞行控制单元和光电单元正常工作后,向机载机载任务管理器发送实时数据,机载机载任务管理器经过裁剪、拼接,组成新的数据包,发给地面;光电单元记录仪开启后,向机载机载任务管理器返回采集的图像信息,机载机载任务管理器对图像进行边缘检测,处理后,将图像信息返回地面;地面控制单元对返回的数据和图像进行分析,实时调整无人机的飞行状态;
25.飞行控制单元接收机载机载任务管理器转发地面的指令,按照指定的航线飞行,并向机载机载任务管理器发送实时的导航信息,包括包括高度、速度、姿态、航向,以及精准的定位信息,包括经度、纬度等;
26.进一步的,所述地面控制单元采用单点控制地面站,控制无人机的开关机、充电,预先设置飞行路线,能够根据接收飞行控制单元传回的实时位置以及机载机载任务管理器处理过的光电单元的图像,实时更改、优化飞行路线;
27.进一步的,所述机载数据链机载数据链是无人机系统的重要组成部分,是飞行器
与地面系统联系的枢纽,所述记载数据链按照传输方向可以分为上行链路和下行链路;
28.上行链路实现地面控制单元到无人机遥控指令的发送和接收;
29.下行链路完成无人机到地面控制单元的遥测数据和视频图像的发送和接收,并根据定位信息的传输,利用上下行链路进行测距,数据链性能直接影响到无人机性能的优劣;
30.所述机载机载任务管理器采用xilinx的zynq
‑
7000 fpga芯片实现,fpga芯片包括uart transceiver模块、data control模块、arm模块和memory controlor模块;
31.本发明装置的机载机载任务管理器核心器件采用xilinx的zynq
‑
7000fpga芯片,其实现框图如图2所示,fpga内部包括uart transceiver、data control、arm、memory controlor等模块。fpga芯片主要采用xilinx zynq
‑
7000系列,主要实现各个单元模块的数据、命令通信以及图像的边缘检测处理等;
32.uart transceiver主要实现串口数据的收发,主要包括串口数据的串并转换,根据事先与飞行控制单元、光电单元、数据链约定好的包头,识别正确的数据包,实时更新寄存器的数据内容;
33.data control是实现各个接口数据交互的主要控制模块,接收来自三个不同uart transceiver模块的数据和命令,根据协议,将来自地面的命令发给相应的uart transceiver;将飞行控制单元和光电单元采集的数据通过重新打包传回地面,将光电单元采集的图像缓存到ddr3,供arm处理,检测完成的图像做好标记发回地面,使用相应算法做进一步检测,检测失败的图像发回地面进行人工分析;
34.arm主要用于实现图像的预处理及边缘检测算法,arm对外的接口采用axi4
‑
mm总线接口,分别与data control和memory controlor连接;当接收到data control的命令及图像缓存地址,arm直接读取ddr3的图像信息,之后对图像使用canny算法进行检测,检测步骤包括图像降噪;计算图像梯度,增强图像,得到可能边缘;非极大值抑制及双阈值筛选。通过在arm的预先处理,图像的内存占有率大大减小,传回地面再做持续优化;既能够减小无人机与地面的数据交互的数据量,使得无人机的数据回传更高效,又能够缩减地面控制单元的检测时间,使得地面多任务管理得以实现;
35.memory controlor是ddr控制器,主要由ip核实现,用户接口采用axi4
‑
mm总线,能够与多模块主从连接,实现数据的自主分发;
36.进一步的,所述飞行控制单元具体包括导航子系统和飞控子系统;
37.导航子系统向无人机提供相对于所选定的参考坐标系的位置、速度、飞行姿态,引导无人机沿指定航线安全、准时、准确地飞行;
38.飞控子系统是无人机完成起飞、空中飞行、执行任务、返厂回收等整个飞行过程的核心系统,对无人机实现全权控制与管理,是无人机执行任务的关键;
39.所述光电单元搭载可见光相机、红外摄像机和激光测距仪,其中可见光机可以代替传统的人工检测,红外热像仪能够通过温度异常变化对比值,发现隐蔽性较强的发热故障点;另外光电单元还具有图像增强、压缩等功能,主要用于目标的锁定、定位及图像的回传。
40.下表为本发明装置飞行控制单元与机载任务管理器的协议:
41.42.[0043][0044]
下表为本发明装置机载数据链与机载任务管理器的协议,是机载任务管理器与飞行控制单元、光电单元、地面控制单元的数据包协议;每一种数据报文开头有16bit的帧头,
结束有8bit的校验和,当帧头和校验和完全符合协议,才算接收到正确的报文:
[0045]
[0046][0047]
最后应说明的是:以上实施例仅用以说明本实用发明的技术方案,而非对其限制;尽管参照前述实施例对本实用发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。