技术特征:
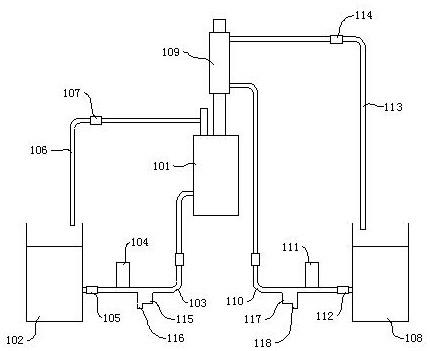
1.磨边系统的控制方法,其特征在于,所述磨边系统包括第一磨边机和第二磨边机,所述第一磨边机和所述第二磨边机用于对目标物进行磨边操作,所述目标物包括第一目标物,所述控制方法包括:获取第一目标组的第一规格参数;其中,所述第一目标组包括至少一个所述第一目标物;根据所述第一规格参数得到第一延时时长;间隔所述第一延时时长控制所述第一目标物传向所述第一磨边机入口,控制通过所述第一磨边机出口的所述第一目标物传向所述第二磨边机入口。2.根据权利要求1所述的磨边系统的控制方法,其特征在于,所述第一规格参数包括长参数和宽参数,所述根据所述第一规格参数得到第一延时时长,包括:获取所述第一目标物的第一测量参数;确定所述第一测量参数在第一预设范围内,并确定所述第一目标物无破损,根据所述宽参数和所述长参数得到所述第一延时时长。3.根据权利要求1所述的磨边系统的控制方法,其特征在于,所述控制通过所述第一磨边机出口的所述第一目标物传向所述第二磨边机入口,包括:控制通过所述第一磨边机出口的所述第一目标物转向;将转向后的所述第一目标物传向所述第二磨边机入口。4.根据权利要求3所述的磨边系统的控制方法,其特征在于,在所述将转向后的所述第一目标物传向所述第二磨边机之后,所述控制方法还包括:获取所述第一目标物的第二测量参数;确定所述第二测量参数在第二预设范围内,控制传向所述第二磨边机入口的所述第一目标物按预设间距排列。5.根据权利要求1至4任一项所述的磨边系统的控制方法,其特征在于,所述目标物还包括第二目标物,所述控制方法还包括:确定所述第一目标组全部通过所述第一磨边机出口,获取第二目标组的第二规格参数;其中,所述第二目标组包括至少一个所述第二目标物;根据所述第二规格参数得到第二延时时长,间隔所述第二延时时长控制所述第二目标物传向所述第一磨边机入口;获取所述第二磨边机对所述第一目标组的磨边状态,根据所述磨边状态控制通过第一磨边机出口的所述第二目标物转向所述第二磨边机入口。6.磨边系统的控制装置,其特征在于,所述磨边系统包括第一磨边机和第二磨边机,所述第一磨边机和所述第二磨边机用于对目标物进行磨边操作,所述目标物包括第一目标物,所述控制装置包括:第一模块,用于获取第一目标组的第一规格参数;其中,第一目标组包括至少一个所述第一目标物;第二模块,用于根据第一规格参数得到第一延时时长;第三模块,用于间隔所述第一延时时长控制所述第一目标物传向所述第一磨边机入口,控制通过所述第一磨边机出口的所述第一目标物传向所述第二磨边机入口。7.磨边系统,其特征在于,包括:
如权利要求6所述的磨边系统的控制装置;第一磨边机和第二磨边机。8.根据权利要求7所述的磨边系统,其特征在于,还包括:转向装置,所述转向装置设置于所述第一磨边机与所述第二磨边机之间,所述转向装置用于对所述目标物进行转向操作。9.磨边系统的控制装置,其特征在于,包括:至少一个处理器;至少一个存储器,用于存储至少一个程序;当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如权利要求1至5中任一项所述的磨边系统的控制方法。10.计算机可读存储介质,其中存储有处理器可执行指令,其特征在于,所述处理器可执行的指令在由处理器执行时用于实现如权利要求1至5中任一项所述的磨边系统的控制方法。
技术总结
本发明公开了一种磨边系统的控制方法、控制装置、磨边系统及存储介质。磨边系统的控制方法包括:获取第一目标组的第一规格参数;其中,所述第一目标组包括至少一个所述第一目标物;根据所述第一规格参数得到第一延时时长;间隔所述第一延时时长控制所述第一目标物传向所述第一磨边机入口,控制通过所述第一磨边机出口的所述第一目标物传向所述第二磨边机入口。本发明实施例能够保证磨边系统磨边操作的连续性,从而提高磨边系统的生产效率。从而提高磨边系统的生产效率。从而提高磨边系统的生产效率。
技术研发人员:韩全寿 黄剑 周泓崑
受保护的技术使用者:中国南玻集团股份有限公司
技术研发日:2021.07.29
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。