技术特征:
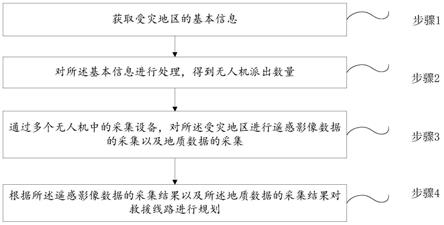
1.一种机器人调度方法,其特征在于,包括:通过配置在第一机器人中的通信模组对外广播所述第一机器人的第一坐标,并监听距离所述第一机器人在预设距离内的第二机器人的第二坐标;根据所述第一坐标及第二坐标计算所述第一机器人与所述第二机器人的距离;确定所述第一机器人与所述第二机器人的第一安全距离;当监测到所述距离小于所述第一安全距离时,将所述第一机器人的最大限制速度减小至第一速度;其中,所述最大限制速度为所述第一机器人的最大运行速度;按照预设频率对外广播所述第一机器人的第一运动路径,并实时监听所述第二机器人的第二运动路径;根据所述第一运动路径及第二运动路径预测所述第一机器人是否会与第二机器人发生碰撞;若是,将所述第一机器人的最大限制速度从所述第一速度减小至第二速度,以低于所述第二速度的速度完成与所述第二机器人的会车。2.根据权利要求1所述的方法,其特征在于,所述确定所述第一机器人与所述第二机器人的第一安全距离的步骤,包括:获取所述第一机器人在正常行驶下的最大限制速度及规定的安全时间;根据所述最大限制速度及规定的安全时间计算所述第一机器人与所述第二机器人的第一安全距离。3.根据权利要求1所述的方法,其特征在于,所述监测到所述距离小于所述第一安全距离的步骤之前,还包括:所述第一机器人以预设参考频率实时判断所述距离是否小于所述第一安全距离;若是,则监测到所述距离小于所述第一安全距离。4.根据权利要求1所述的方法,其特征在于,所述根据所述第一运动路径及第二运动路径预测所述第一机器人是否会与第二机器人发生碰撞的步骤,包括:根据所述第一运动路径及第二运动路径判断所述第一机器人与第二机器人是否存在重复区域;其中,所述重复区域为所述第一机器人和第二机器人以自身中心为圆心、最大外切圆半径为半径及预设角度作扇形区域时,所述第一机器人的扇形区域与所述第二机器人的扇形区域的重叠区域;根据所述重复区域预测所述第一运动路径是否存在同一时刻下所述第一机器人与第二机器人的距离小于或等于第二安全距离的路径点;其中,所述第二安全距离为所述第一机器人的最大外径与所述第二机器人的最大外径之和;若是,则判定所述第一机器人会与第二机器人发生碰撞。5.根据权利要求4所述的方法,其特征在于,所述以低于所述第二速度的速度完成与所述第二机器人的会车的步骤,包括:获取所述第一机器人及第二机器人的优先级;判断所述第一机器人的优先级是否低于第二机器人的优先级;若是,获取所述第一机器人会与第二机器人发生碰撞的路径点,控制所述第一机器人在远离所述路径点预设距离的指定位置减速至低于所述第二速度。6.根据权利要求4所述的方法,其特征在于,当所述第二机器人包括多台时,所述以低
于所述第二速度的速度完成与所述第二机器人的会车的步骤,包括:判断多台第二机器人之间是否存在会车;若是,获取正在会车的第二机器人之间的第三安全距离,控制所述第一机器人在所述第二机器人之间的第三安全距离减速至零,直至第二机器人之间完成会车;其中,所述第三安全距离为两个所述第二机器人的最大外径之和。7.根据权利要求1所述的方法,其特征在于,所述将所述第一机器人的最大限制速度减小至第一速度的步骤,包括:获取所述第一机器人及第二机器人的优先级;判断所述第一机器人的优先级是否低于第二机器人的优先级;若是,获取所述第二机器人的姿态,根据所述姿态判定所述第二机器人处于运动状态时,则将所述第一机器人的最大限制速度减小至第一速度。8.根据权利要求1所述的方法,其特征在于,所述按照预设频率对外广播所述第一机器人的第一运动路径,并实时监听所述第二机器人的第二运动路径的步骤之后,还包括:根据所述第一运动路径及第二运动路径,预测所述第一机器人是否会与第二机器人在同一过道相遇且发生碰撞;若是,获取所述第一机器人及第二机器人的优先级,判断所述第一机器人的优先级是否低于第二机器人的优先级;若是,控制所述第一机器人前往指定避让点进行避让。9.根据权利要求1所述的方法,其特征在于,所述按照预设频率对外广播所述第一机器人的第一运动路径,并实时监听所述第二机器人的第二运动路径的步骤之后,还包括:根据所述第一运动路径及第二运动路径,预测所述第一机器人是否会与第二机器人在同一过道相遇且发生碰撞;若是,确定所述第一机器人及第二机器人分别进入过道的时间,根据所述第一机器人及第二机器人分别进入过道的时间判断所述第一机器人是否后进入过道;若是,控制所述第一机器人前往指定避让点进行避让。10.一种机器人,其特征在于,所述机器人包括存储器和处理器,所述存储器中存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,使得所述处理器执行如权利要求1至9中任一项所述的机器人调度方法。
技术总结
本申请提供了一种机器人调度方法、装置、机器人及存储介质。机器人调度方法包括:对外广播第一机器人的第一坐标,并监听第二机器人的第二坐标;根据第一坐标及第二坐标计算第一机器人与第二机器人的距离;当监测到距离小于第一安全距离时,将第一机器人的最大限制速度减小至第一速度;按照预设频率对外广播第一机器人的第一运动路径,并实时监听第二机器人的第二运动路径;根据第一运动路径及第二运动路径预测第一机器人是否会与第二机器人发生碰撞;若是,将第一机器人的最大限制速度从第一速度减小至第二速度,以低于第二速度的速度完成与所述第二机器人的会车。本申请通过逐步调整第一机器人的最大限制速度的方式避免碰撞的发生。的发生。的发生。
技术研发人员:刘磊 戴海峰 吴延泽 胡浩瀚 李烁林 曹益全
受保护的技术使用者:千里眼(广州)人工智能科技有限公司
技术研发日:2021.07.12
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。