1.本发明涉及移动机器人路径规划领域,特别涉及基于交通规则的移动机器人路径规划方法、系统及存储介质。
背景技术:
2.随着移动机器人技术的发展,激光无轨导航移动机器人逐渐取代传统磁导航、色带导航等有轨导航机器人,但是,在机器人实际工作时,多机器人、机器人与人在同一工作区域作业时,由于移动机器人不受规则约束导致发生拥堵、效率低等问题,而在实际环境添加约束设施会导致成本增加、影响通行等问题。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种基于交通规则的移动机器人路径规划方法,该方法通过设置交通规则,对移动机器人的行驶规范进行限制。
4.技术方案:为实现上述目的,本发明的基于交通规则的移动机器人路径规划方法包括:控制移动机器人移动并采集数据;根据所述移动机器人采集的数据编辑环境地图生成环境地图文件;编辑交通规则并生成与所述环境地图相匹配的交通规则地图文件;所述交通规则包括行驶边界及行驶方向;为移动机器人设置起点和终点;控制移动机器人从起点导航运动到终点。
5.进一步地,所述控制移动机器人从起点导航运动到终点包括:将所述环境地图划分栅格;控制移动机器人进行栅格搜索并筛选,将能够供移动机器人行走的栅格定义为有效栅格;控制移动机器人在所述有效栅格范围内进行路径规划。
6.进一步地,所述控制移动机器人进行栅格搜索并筛选,将能够供移动机器人行走的栅格定义为有效栅格包括:判断所述栅格是否有障碍物,得到第一判断结果;若第一判断结果为是,则该栅格被弃用;若第一判断结果为否,则判断该栅格是否符合交通规则规定的行驶边界,得到第二判断结果;若第二判断结果为否,则该栅格被弃用;若第二判断为是,则该栅格保留为有效栅格。
7.进一步地,所述交通规则包括单向行驶车道、双向行驶车道,其车道边界包括虚线和实线;所述判断该栅格是否符合交通规则规定的行驶边界包括:判断该栅格是否在车道内侧,得到第三判断结果;若第三判断结果为是,则该栅格符合交通规则规定的行驶边界;若第三判断结果为否,则判断该栅格是否处在虚线位置,得到第四判断结果;若第四判断结果为是,则该栅格符合交通规则规定的行驶边界。
8.进一步地,所述控制移动机器人在所述有效栅格范围内进行路径规划包括:判断所述起点和终点是否均为有效栅格,得到第五判断结果;若第五判断结果为否,则结束该路径规划;若第五判断结果为是,则寻找最优路径。
9.进一步地,定义当前所处的栅格为实际子节点,其中起始的实际子节点为所述移动机器人的起点,最终的实际子节点为所述移动机器人的终点,其特征在于,所述寻找最优
路径包括:对实际子节点周围符合一定要求的有效栅格进行搜索,并将之设置为子节点;对所有所述子节点进行优先级排序得到优先级不同的子节点,确定最优的所述子节点为最优路径上的实际子节点;判断所述实际子节点是否为终点,得到第六判断结果;若第六判断结果为否,则继续搜索下一个实际子节点;若第六判断结果为是,则结束搜索,将所有所述实际子节点串联在一起即为最优路径。
10.进一步地,结合环境地图以及机器人最终的终点坐标,定义子节点的优先级评价标准;所述对所有所述子节点进行优先级排序得到优先级不同的子节点,确定最优的所述子节点为最优路径上的实际子节点包括:以当前的实际子节点为基础,计算所述子节点到所述实际子节点的方向向量;判断所述方向向量是否与交通规则规定的行驶方向相同,得到第七判断结果;若第七判断结果为是,则根据所述方向向量将该子节点按照优先级评价标准进行评价,将优先级最高的子节点设置为下一个实际子节点。
11.进一步地,定义交通规则规定的行驶方向的向量为当前实际子节点坐标为b(x1,y1,θ1),下一个子节点方位坐标c(x2,y2,θ2),其中x1,y1表示前实际子节点的位置坐标,θ1表示当前实际子节点的方向坐标,x2,y2表示下一个子节点的位置坐标,θ2表示下一个子节点的方向坐标;所述判断所述子节点方位坐标是否与交通规则规定的行驶方向相同包括:计算实际子节点到下一个子节点的扩展方向向量((x2
‑
x1),(y2
‑
y1));计算下一个子节点自身的方向向量其中δ为角度分辨率,表示将圆周2π等分之后的最小单位,其大小可根据实际情况进行设定;判断与是否同时大于等于0,得到第一判断结果;若第八判断结果为是,则该子节点方位坐标是交通规则规定的行驶方向相同。
12.基于交通规则的移动机器人路径规划系统,包括:采集模块,其用于控制移动机器人移动并采集数据;第一处理模块,其用于根据所述移动机器人采集的数据编辑环境地图生成环境地图文件;第二处理模块,其用于编辑交通规则并生成与所述环境地图相匹配的交通规则地图文件;所述交通规则包括行驶边界及行驶方向;设置模块,其用于为移动机器人设置起点和终点;导航模块,其用于控制移动机器人从起点导航运动到终点。
13.一种存储介质,其内存储有可执行程序,所述可执行程序被控制器执行时能够实现如权利要求1
‑
8任一项所述的物流配送调度方法。
14.有益效果:本发明的采用车道的概念对机器人的环境地图进行限制,加入车道实线与虚线概念对机器人进行约束,并采用运动基元对机器人进行全局路径规划,使得机器人在实际应用中具有更高的灵活性和适用性。
附图说明
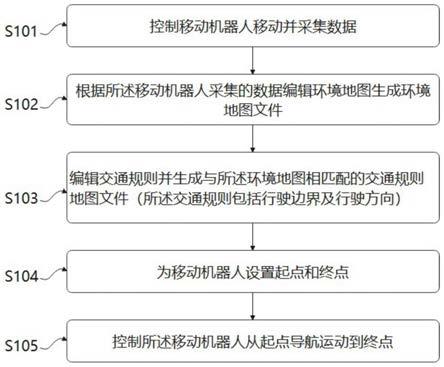
15.附图1为基于交通规则的移动机器人路径规划方法流程图;
16.附图2为子节点优先级排序示意图。
具体实施方式
17.下面结合附图对本发明作更进一步的说明。
18.本发明的基于交通规则的移动机器人路径规划方法,应用于对移动机器人进行建
图、导航,移动机器人包括移动底盘、数据采集模块、控制模块,其中移动底盘用于执行整个系统的行走动作,数据采集模块用于采集环境信息,为移动底盘行走提供数据,控制模块可根据采集环境信息以及移动底盘的移动目标对移动底盘进行控制。
19.如图1所示的基于交通规则的移动机器人路径规划方法包括如下s101
‑
s105步骤:
20.步骤s101,控制移动机器人移动并采集数据;
21.步骤s102,根据所述移动机器人采集的数据编辑环境地图生成环境地图文件;
22.步骤s101
‑
s102中,通过移动手柄或者摇杆控制移动机器人在需要工作的环境区域运动并采集环境数据,针对环境建立环境地图。
23.步骤s103,编辑交通规则并生成与所述环境地图相匹配的交通规则地图文件,所述交通规则包括行驶边界及行驶方向;
24.该步骤中,需要根据环境以及移动机器人运动的实际要求,建立交通规则,并将该交通规则匹配到步骤s102中建立的环境地图中,生成具有交通规则的地图文件。
25.步骤s104,为移动机器人设置起点和终点;
26.该起点应设置在移动机器人所在位置附近,以便机器人很快匹配到起点位置;
27.步骤s105,控制移动机器人从起点导航运动到终点。
28.优选地,上述步骤s105中,控制移动机器人从起点导航运动到终点包括如下步骤s201
‑
s203:
29.步骤s201,将所述环境地图划分栅格;
30.该步骤中,如图2所示,所述栅格将环境地图划分成最小的识别单元,每个栅格都处在环境地图不同的坐标位置上,可为为后续导航提供位置数据。
31.步骤s202,控制移动机器人进行栅格搜索并筛选,将能够供移动机器人行走的栅格定义为有效栅格;
32.步骤s203,控制移动机器人在所述有效栅格范围内进行路径规划;
33.上述步骤s201
‑
s203中,将可供移动机器人运动的位置通过栅格的形式进行筛选,有效栅格均属于没有障碍物且可供移动机器人运动的范围,该步骤为移动机器人画出了安全行走区域,为后续路径规划打好基础。
34.优选地,上述步骤s202中,控制移动机器人进行栅格搜索并筛选,将能够供移动机器人行走的栅格定义为有效栅格包括如下步骤s301
‑
s305:
35.步骤s301,判断所述栅格是否有障碍物,得到第一判断结果;
36.步骤s302,若第一判断结果为是,则该栅格被弃用;
37.步骤s301
‑
s302,将有障碍物的栅格剔除,以免移动机器人运动过程中发生碰撞等危险。
38.步骤s303,若第一判断结果为否,则判断该栅格是否符合交通规则规定的行驶边界,得到第二判断结果;
39.步骤s304,若第二判断结果为否,则该栅格被弃用;
40.步骤s305,若第二判断为是,则该栅格保留为有效栅格;
41.步骤s303
‑
s305,根据交通规则地图进一步的对移动机器人的行走区域进行限制,将不符合交通规则的区域进行排除,以便移动机器人能够遵守交通规则,避免发生碰撞等,提高了其安全性;
42.优选地,所述交通规则包括单向行驶车道、双向行驶车道,其车道边界包括虚线和实线,如图2所示的交通规则为单向行驶车道所对应的交通规则,其空箭头所指的方向为行驶方向,所述单向行驶车道的边界有实现和虚线,实线表示机器人不可以到达的位置,虚线表示机器人可以到达的位置;所述步骤s303,判断该栅格是否符合交通规则规定的行驶边界包括步骤s401
‑
s404:
43.步骤s401,判断该栅格是否在车道内侧,得到第三判断结果;
44.步骤s402,若第三判断结果为是,则该栅格符合交通规则规定的行驶边界;
45.步骤s403,若第三判断结果为否,则判断该栅格是否处在虚线位置,得到第四判断结果;
46.步骤s404,若第四判断结果为是,则该栅格符合交通规则规定的行驶边界;
47.上述步骤s401
‑
s404中,可根据场地实际情况进行交通规则设置,该交通规则设置与人们对交通规则的普遍认识相一致,有助于人、车共同遵守。
48.优选地,上述步骤s203中,所述控制移动机器人在所述有效栅格范围内进行路径规划包括步骤s501
‑
s503:
49.步骤s501,判断所述起点和终点是否均为有效栅格,得到第五判断结果;
50.步骤s502,若第五判断结果为否,则结束该路径规划;
51.步骤s503,若第五判断结果为是,则寻找最优路径。
52.上述步骤s501
‑
s503,为导航的最基本的前提,需要确保起点和终点均没有障碍且在交通规则规定的行驶区域内才可以进行接下来的路径规划工作。
53.优选地,上述步骤s503中,定义当前所处的栅格为实际子节点,其中起始的实际子节点为所述移动机器人的起点,最终的实际子节点为所述移动机器人的终点,所述寻找最优路径包括步骤s601
‑
s605:
54.步骤s601,对实际子节点周围符合一定要求的有效栅格进行搜索,并将之设置为子节点;
55.该步骤中,首先设定一个栅格搜索步距,比如100个栅格作为搜索步距进行子节点搜索,判断是否有符合要求的栅格,如果有符合要求的栅格,则将搜索到的栅格定义为子节点,如果没有符合要求的栅格,则将搜索步距缩小到90,依次搜索;
56.步骤s602,对所有所述子节点进行优先级排序得到优先级不同的子节点,确定最优的所述子节点为最优路径上的实际子节点;
57.该步骤中,首先对搜索到的子节点进行优先级排序,选出优先级最高的子节点,继续循环搜索,如果出现优先级高于该子节点的,则将该子节点进行替换,一定时间内,未找到更优的子节点,则该子节点定义为实际子节点,接下来以该实际子节点为基础,在进行子节点筛选,确定下一个实际子节点;
58.步骤s603,判断所述实际子节点是否为终点,得到第六判断结果;
59.步骤s604,若第六判断结果为否,则继续搜索下一个实际子节点;
60.步骤s605,若第六判断结果为是,则结束搜索,将所有所述实际子节点串联在一起即为最优路径。
61.优选地,结合环境地图以及机器人最终的终点坐标,定义子节点的优先级评价标准;步骤s602,对所有所述子节点进行优先级排序得到优先级不同的子节点,确定最优的所
述子节点为最优路径上的实际子节点包括步骤s701
‑
s703:
62.步骤s701,以当前的实际子节点为基础,计算所述子节点到所述实际子节点的方向向量;
63.步骤s702,判断所述方向向量是否与交通规则规定的行驶方向相同,得到第七判断结果;
64.步骤s703,若第七判断结果为是,则根据所述方向向量将该子节点按照优先级评价标准进行评价,将优先级最高的子节点设置为下一个实际子节点。
65.该步骤中,与机器人行驶目标方向重合的方位上的子节点优先级最高;与机器人行驶目标方向之间的角度越大的方位上的子节点优先级越低;如图2所示的,优先级从高到低依次为粗实线箭头方向、细实线箭头方向、虚线箭头方向。
66.优选地,定义交通规则规定的行驶方向的向量为当前实际子节点坐标为b(x1,y1,θ1),下一个子节点方位坐标c(x2,y2,θ2)其中x1,y1表示前实际子节点的位置坐标,θ1表示当前实际子节点的方向坐标,x2,y2表示下一个子节点的位置坐标,θ2表示下一个子节点的方向坐标;所述步骤s702包括判断所有子节点方位坐标是否与交通规则规定的行驶方向相同包括步骤s801
‑
s804:
67.步骤s801,计算实际子节点到下一个子节点的扩展方向向量为步骤s801,计算实际子节点到下一个子节点的扩展方向向量为
68.计算下一个子节点自身的方向向量
69.其中δ为角度分辨率,表示将圆周2π等分之后的最小单位,其大小可根据实际情况进行设定;
70.步骤s803,判断与是否同时大于等于0,得到第一判断结果;
71.步骤s804,若第八判断结果为是,则该子节点方位坐标是交通规则规定的行驶方向相同。
72.上述步骤中,扩展方向向量表示移动机器人从实际子节点到达下一个子节点的行走方向,下一个子节点自身的方向向量表示移动机器人到达该子节点的超朝向,与是否同时大于等于0表示移动机器人在交通规则规定的方向上行走,没有逆行。
73.基于交通规则的移动机器人路径规划系统,包括:采集模块,其用于控制移动机器人移动并采集数据;第一处理模块,其用于根据所述移动机器人采集的数据编辑环境地图生成环境地图文件;第二处理模块,其用于编辑交通规则并生成与所述环境地图相匹配的交通规则地图文件;所述交通规则包括行驶边界及行驶方向;设置模块,其用于为移动机器人设置起点和终点;导航模块,其用于控制移动机器人从起点导航运动到终点。
74.一种存储介质,其内存储有可执行程序,所述可执行程序被控制器执行时能够实现如权利要求1
‑
8任一项所述的物流配送调度方法。
75.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

