1.本发明涉及工业机器人技术领域,具体为一种用于工业机器人的货物抓取装置。
背景技术:
2.多关节型工业机器的手臂与人一体上肢类似,其结构最紧凑,灵活性大,占地面积最小,能与其他工业机器人协调工作,这种工业机器人应用越来越广泛,现有工业机器人不便于对小型无序货物进行抓取。
3.经过检索例如专利号为cn109159140a的专利公开了一种用于工业机器人的货物抓取装置,包括底座,所述底座的顶壁上固定连接有法兰连接板,所述底座的底壁中央固定连接有圆柱体,所述圆柱体的底壁上连接有万向节,所述万向节远离圆柱体的一端固定连接有水平的支撑板,所述支撑板的顶壁上开设有两个上下连通的矩形开口,所述矩形开口上侧的底座上安装有一级抓取机构,且一级抓取机构可延伸至支撑板的下侧,所述底座的底壁上安装有与一级抓取机构连接的调节机构,优点在于:本发明能够根据货物抓取位置的需求进行相应的调整,并且避免货物在搬运时出现掉落的情况。
4.再例如专利号为cn110281261a的专利公开了一种用于工业机器人的货物抓取装置,包括支撑框,所述支撑框的内部设置有双轴电机,所述双轴电机两侧的输出轴上设置有螺杆一和螺杆二,所述螺杆一上套设有夹板一,所述夹板一和所述夹板二与所述支撑框之间设置有限位机构,所述夹板一和所述夹板二内部的底端分别均开设有若干通孔,所述夹板一和所述夹板二的一侧设置有框体,所述框体内部的底端设置有辅助夹紧装置,所述框体内部一侧的顶端设置有驱动电机,所述驱动电机与所述辅助夹紧装置之间通过滑轮组相配合连接,有益效果:工作稳定,能够在抓取过程中对货物进行双重加固,避免造成货物掉落情况的发生,使用方便,操作简单,工作效率高。
5.基于上述,传统的用于工业机器人的货物抓取装置一般为夹板结构,不便于对不同大小和不同摆放角度的货物进行无序抓取,装置的适配性较差,不便于对抓取结构进行倾斜角度控制,不能进一步对抓取结构进行多角度调节,不便于完成对微型货物零部件的抓取。
6.因此,不满足现有的需求,对此我们提出了一种用于工业机器人的货物抓取装置。
技术实现要素:
7.(一)技术问题本发明的目的在于提供一种用于工业机器人的货物抓取装置,以解决上述背景技术中提出的传统的用于工业机器人的货物抓取装置一般为夹板结构,不便于对不同大小和不同摆放角度的货物进行抓取,装置的适配性较差,不便于对抓取结构进行倾斜角度控制,不能进一步对抓取结构进行多角度调节,不便于完成对微型货物零部件的抓取的问题。
8.(二)技术方案为实现上述目的,本发明提供如下技术方案:一种用于工业机器人的货物抓取装
置,包括机械臂主体;所述机械臂主体底座左侧固定连接有液压泵机;所述机械臂主体顶部末端通过铰连接设置有一级调角结构;所述一级调角结构包括一级铰接座、控制部和伺服电机,一级铰接座通过铰连接设置于机械臂主体顶部末端处,控制部固定连接于一级铰接座左侧立面处,伺服电机固定连接于一级铰接座前端;所述一级铰接座前端通过铰连接设置有二级调角结构;所述二级调角结构前端设置有灵活抓取结构;所述灵活抓取结构前端设置有抓持瓣,抓持瓣数量设置为四组。
9.优选的,所述二级调角结构包括:倾斜调节架,其为十字型结构,倾斜调节架通过同轴连接设置于伺服电机转轴前端处;四角摄像头,四角摄像头数量设置为四组,其固定连接于倾斜调节架内侧凹陷角处。
10.优选的,所述二级调角结构还包括:延伸架,延伸架固定连接于倾斜调节架外侧立面处;四角液压缸,四角液压缸数量设置为四组,其通过铰连接设置于延伸架前侧。
11.优选的,所述二级调角结构还包括:支撑架,支撑架固定连接于倾斜调节架前端立面处;内侧板,内侧板数量设置为四组,内侧板通过铰连接设置于支撑架前端处,内侧板前端外侧立面处与四角液压缸伸缩部前端通过铰连接。
12.优选的,所述二级调角结构还包括:调角盘,调角盘为圆盘形结构,调角盘通过铰连接设置于四组内侧板前端处;延伸头,延伸头数量设置为四组,延伸头固定连接于调角盘外曲侧面,其与内侧板前端通过铰连接。
13.优选的,所述二级调角结构还包括:滑槽,滑槽数量设置为四组,其等距开设于调角盘曲侧面,其与延伸头相隔角度为四十五度;延伸螺纹管,延伸螺纹管固定连接于调角盘前端立面处。
14.优选的,所述二级调角结构还包括:内铰接座,内铰接座固定连接于延伸螺纹管前端立面处;前延杆,其数量设置为四组,前延杆固定连接于内铰接座前端立面处。
15.优选的,所述灵活抓取结构包括:内置法兰套,内置法兰套设置于四组内侧板相对内侧;支撑板,其数量设置为四组,其固定连接于内置法兰套前端立面处,支撑板前端与调角盘后端立面相固定。
16.优选的,所述灵活抓取结构还包括:内置液压缸,内置液压缸通过法兰连接设置于内置法兰套内曲侧面;伸缩固定盘,其固定连接于内置液压缸前侧伸缩部末端处;
一级连杆,一级连杆数量设置为四组,其固定连接于伸缩固定盘前端;二级连杆,其通过铰连接设置于一级连杆前端,其位于滑槽内侧。
17.优选的,所述抓持瓣包括:圆槽,圆槽固定连接于四组抓持瓣相对内侧处;扇形座,扇形座设置于调角盘前侧;等距铰接座,其数量设置为八组,其固定连接于扇形座后端立面处,其分别于前延杆和二级连杆前端铰连接;夹持锥瓣,夹持锥瓣固定连接于扇形座前端。
18.(三)有益效果1、本发明通过设置四角摄像头,通过四角摄像头对灵活抓取结构前侧的货物进行四个角度的拍摄,通过将四组图像进行合并后,通过控制部内部处理器进行综合处理后,可以形成对货物外形的立体判断,便于控制部控制伺服电机转动和四角液压缸运转进行配合,便于实时对货物抓取角度进行设定,进而便于对不同大小和不同摆放角度的货物进行无序抓取,提高了装置的适配性。
19.2、本发明还通过设置二级调角结构,通过与一级调角结构配合后,通过控制台控制中部电机运转,通过控制部检测四角摄像头合成图像后,通过处理器计算得出抓取角度后,通过控制部电路控制机械臂主体进行角度偏转后,通过电路控制液压泵机运转,通过管道使四组四角液压缸进行运转,通过四角液压缸伸缩部伸缩,通过与支撑架配合,可以对四组内侧板角度进行调节,从而可以控制四组内侧板前端铰连接的调角盘倾斜度,从而可以使调角盘前端铰连接的灵活抓取结构进行倾斜角度控制,便于对抓取结构进行多角度调节。
20.3、本发明还通过设置抓持瓣,通过调角盘对灵活抓取结构进行角度调节后,通过控制部电路控制内置液压缸运转,可以使其伸缩部向后收缩,从而使四组一级连杆带动二级连杆于滑槽内侧向后滑动,从而带动四组扇形座后端的相对外圈等距铰接座向后翻折,通过与前延杆配合,可以使四组抓持瓣进行分裂张开,从而通过控制部控制内置液压缸运转伸缩,可以对抓持瓣进行开合控制,从而便于完成对微型货物零部件的抓取。
附图说明
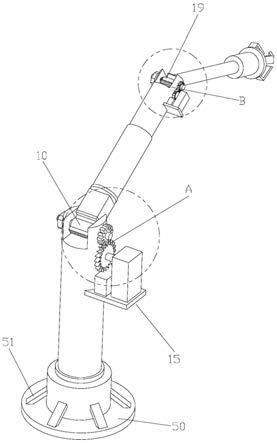
21.图1为本发明实施例整体的前侧立体结构示意图;图2为本发明实施例中图1中a的局部放大示意图;图3为本发明实施例中倾斜调节架左侧的立体拆解结构示意图;图4为本发明实施例中图3中b的局部放大示意图;图5为本发明实施例中倾斜调节架右侧的立体拆解结构示意图;图6为本发明实施例中图5中c的局部放大示意图;图7为本发明实施例中内铰接座的立体拆解结构示意图;图8为本发明实施例整体的俯视立体结构示意图;图9为本发明实施例中抓持瓣的立体结构示意图;在图1至图9中,部件名称或线条与附图编号的对应关系为:1、机械臂主体;
2、液压泵机;3、一级铰接座;301、控制部;302、伺服电机;4、倾斜调节架;401、四角摄像头;402、延伸架;4021、四角液压缸;403、支撑架;4031、内侧板;5、调角盘;501、延伸头;502、滑槽;503、延伸螺纹管;5031、内铰接座;5032、前延杆;6、内置法兰套;601、支撑板;602、内置液压缸;6021、伸缩固定盘;6022、一级连杆;6023、二级连杆;7、抓持瓣;701、圆槽;702、扇形座;7021、等距铰接座;703、夹持锥瓣。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
23.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
24.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
25.请参阅图1至图9,本发明提供的一种实施例:一种用于工业机器人的货物抓取装置,包括机械臂主体1;机械臂主体1底座左侧固定连接有液压泵机2;机械臂主体1顶部末端通过铰连接设置有一级调角结构;一级调角结构包括一级铰接座3、控制部301和伺服电机302,一级铰接座3通过铰连接设置于机械臂主体1顶部末端处,控制部301固定连接于一级铰接座3左侧立面处,伺服电机302固定连接于一级铰接座3前端;一级铰接座3前端通过铰连接设置有二级调角结构;二级调角结构前端设置有灵活抓取结构;灵活抓取结构前端设置有抓持瓣7,抓持瓣7数量设置为四组,控制部301电路与液压泵机2电性相连接,液压泵机2通过液压管道与四组四角液压缸4021相连接。
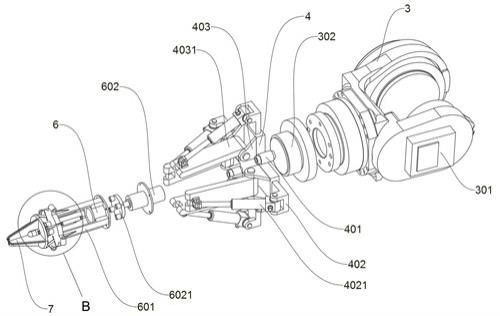
26.如图3所示,二级调角结构还包括:延伸架402,延伸架402固定连接于倾斜调节架4外侧立面处;四角液压缸4021,四角液压缸4021数量设置为四组,其通过铰连接设置于延伸架402前侧;支撑架403,支撑架403固定连接于倾斜调节架4前端立面处;内侧板4031,内侧板4031数量设置为四组,内侧板4031通过铰连接设置于支撑架403前端处,内侧板4031前端外侧立面处与四角液压缸4021伸缩部前端通过铰连接;调角盘5,调角盘5为圆盘形结构,调
角盘5通过铰连接设置于四组内侧板4031前端处;延伸头501,延伸头501数量设置为四组,延伸头501固定连接于调角盘5外曲侧面,其与内侧板4031前端通过铰连接;滑槽502,滑槽502数量设置为四组,其等距开设于调角盘5曲侧面,其与延伸头501相隔角度为四十五度;延伸螺纹管503,延伸螺纹管503固定连接于调角盘5前端立面处;内铰接座5031,内铰接座5031固定连接于延伸螺纹管503前端立面处;前延杆5032,其数量设置为四组,前延杆5032固定连接于内铰接座5031前端立面处,通过控制部301检测四角摄像头401合成图像后,通过处理器计算得出抓取角度后,通过控制部301电路控制机械臂主体1进行角度偏转后,通过电路控制液压泵机2运转,通过管道使四组四角液压缸4021进行运转,通过四角液压缸4021伸缩部伸缩,通过与支撑架403配合,可以对四组内侧板4031角度进行调节,从而可以控制四组内侧板4031前端铰连接的调角盘5倾斜度,从而可以使调角盘5前端铰连接的灵活抓取结构进行倾斜角度控制,便于对抓取结构进行多角度调节。
27.如图2所示,二级调角结构包括:倾斜调节架4,其为十字型结构,倾斜调节架4通过同轴连接设置于伺服电机302转轴前端处;四角摄像头401,四角摄像头401数量设置为四组,其固定连接于倾斜调节架4内侧凹陷角处,通过四角摄像头401对灵活抓取结构前侧的货物进行四个角度的拍摄,通过将四组图像进行合并后,通过控制部301内部处理器进行综合处理后,可以形成对货物外形的立体判断,便于控制部301控制伺服电机302转动和四角液压缸4021运转,便于对货物抓取角度进行设定,进而便于对货物进行抓取。
28.如图9所示,抓持瓣7包括:圆槽701,圆槽701固定连接于四组抓持瓣7相对内侧处;扇形座702,扇形座702设置于调角盘5前侧;等距铰接座7021,其数量设置为八组,其固定连接于扇形座702后端立面处,其分别于前延杆5032和二级连杆6023前端铰连接;夹持锥瓣703,夹持锥瓣703固定连接于扇形座702前端,通过在四组扇形座702中心处设置圆槽701,可以扩大四组与前延杆5032相铰接的等距铰接座7021之间的间距,可以使四组抓持瓣7在进行扩张时,使扇形座702内侧避免接触可以防止卡位。
29.如图7所示,灵活抓取结构包括:内置法兰套6,内置法兰套6设置于四组内侧板4031相对内侧;支撑板601,其数量设置为四组,其固定连接于内置法兰套6前端立面处,支撑板601前端与调角盘5后端立面相固定;内置液压缸602,内置液压缸602通过法兰连接设置于内置法兰套6内曲侧面,内置液压缸602电路与控制部301电路相耦合;伸缩固定盘6021,其固定连接于内置液压缸602前侧伸缩部末端处;一级连杆6022,一级连杆6022数量设置为四组,其固定连接于伸缩固定盘6021前端;二级连杆6023,其通过铰连接设置于一级连杆6022前端,其位于滑槽502内侧,通过调角盘5对灵活抓取结构进行角度调节后,通过控制部301电路控制内置液压缸602运转,可以使其伸缩部向后收缩,从而使四组一级连杆6022带动二级连杆6023于滑槽502内侧向后滑动,从而带动四组扇形座702后端的相对外圈等距铰接座7021向后翻折,通过与前延杆5032配合,可以使四组抓持瓣7进行分裂张开,从而通过控制部301控制内置液压缸602运转伸缩,可以对抓持瓣7进行开合控制,从而完成对微型货物零部件的抓取。
30.在本发明另一实施例中,一级连杆6022外曲侧面固定连接于弹簧,弹簧前端与调角盘5后端立面处相固定,当停止内置液压缸602运转后,使抓持瓣7停止对货物夹持后,通过弹簧复位带动一级连杆6022向后侧位移,可以使前端的四组抓持瓣7快速扩张,可以提高响应速度。
31.工作原理:装置进行使用时,对机械臂主体1进行启动后,通过四角摄像头401对灵活抓取结构前侧的货物进行四个角度的拍摄,通过将四组图像进行合并后,通过控制部301内部处理器进行综合处理后,可以形成对货物外形的立体判断,便于控制部301控制伺服电机302转动和四角液压缸4021运转,通过控制部301检测四角摄像头401合成图像后,通过处理器计算得出抓取角度后,通过控制部301电路控制机械臂主体1进行角度偏转后,通过电路控制液压泵机2运转,通过管道使四组四角液压缸4021进行运转,通过四角液压缸4021伸缩部伸缩,通过与支撑架403配合,可以对四组内侧板4031角度进行调节,从而可以控制四组内侧板4031前端铰连接的调角盘5倾斜度,从而可以使调角盘5前端铰连接的灵活抓取结构进行倾斜角度控制,通过控制部301电路控制内置液压缸602运转,可以使其伸缩部向后收缩,从而使四组一级连杆6022带动二级连杆6023于滑槽502内侧向后滑动,从而带动四组扇形座702后端的相对外圈等距铰接座7021向后翻折,通过与前延杆5032配合,可以使四组抓持瓣7进行分裂张开,从而通过控制部301控制内置液压缸602运转伸缩,可以对抓持瓣7进行开合控制,从而完成对微型货物零部件的抓取。
32.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。