1.本发明涉及机械手技术领域,尤其涉及一种用于天窗的取料机械手。
背景技术:
2.汽车天窗通常需要用到整块的玻璃,玻璃的面积较大而且不可分割,所以现有的天窗在在搬运时需要使用能搬运体型较大的物件的设备,而该设备通常精度较低,难以对物料摆放存在的位置偏差进行校正,导致经过取料的天窗仍然没有消除摆放时的位置偏差。如果对中的过程中需要对天窗的位置校正对中,通常需要将天窗放置于对中装置,由对中装置对天窗的位置调整完成对中后,再通过取料装置将天窗进行取料和运输,但增加对中装置需要增加设备的资金投入,也需要增加设备占地面积,因此需要一种带有位置校正功能的取料设备进行天窗的取料和搬运以节省搬运天窗的空间和成本。
技术实现要素:
3.基于此,本发明提供一种带有位置校正功能的用于天窗的取料机械手。
4.本发明的技术方案为:一种用于天窗的取料机械手,包括移动装置和抓取装置,所述抓取装置包括抓取组件、校正组件和旋转组件,所述抓取装置通过所述旋转组件与所述移动装置之间转动连接;
5.所述校正组件包括第一定位块、第二定位块、第三定位块、第四定位块和彼此垂直的第一滑杆、第二滑杆,所述第一定位块和所述第三定位块分别滑动安装于所述第一滑杆的两端,所述第二定位块和所述第四定位块分别安装于所述第二滑杆的两端。
6.可选的,所述校正组件包括第一驱动气缸,所述第一定位块、所述第二定位块、所述第三定位块和所述第四定位块均与所述第一驱动气缸连接,且通过所述第一驱动气缸带动所述第一定位块、所述第二定位块、所述第三定位块和所述第四定位块的滑动。
7.可选的,所述抓取装置包括锁止组件,所述锁止组件动作时,所述第一定位块、所述第二定位块、所述第三定位块、所述第四定位块和所述抓取组件为固定状态。
8.可选的,抓取组件为若干个真空吸盘。
9.可选的,所述移动装置包括第一移动组件和第二移动组件,所述第一移动组件包括水平设置的第一滑轨,所述第二移动组件包括水平设置的第二滑轨,所述第二移动组件滑设于所述第一移动组件,所述校正组件滑设于所述第二移动组件,所述第一移动组件与所述第二移动组件垂直。
10.可选的,所述第一移动组件和所述第二移动组件之间设有竖直调节组件,所述竖直调节组件包括升降板、滑板和拖链,所述升降板的一端安装于第一滑轨,所述第二滑轨安装于所述滑板远离所述升降板的一端,所述升降板和所述滑板之间通过拖链连接和带动所述滑板的升降。
11.可选的,所述竖直调节组件包括电动葫芦和电控箱,所述电动葫芦设于所述升降板的上端用于带动所述拖链的移动,所述电控箱设于所述升降板的侧表面用于控制所述电
动葫芦。
12.可选的,所述抓取装置的下表面设有与所述电控箱电连接的感应器,所述感应器与天窗接触或达到预设距离时,所述电控箱控制所述电动葫芦停止动作。
13.可选的,所述移动装置还包括所述第三移动组件、第二驱动气缸和第三驱动气缸,所述第二驱动气缸的固定端安装于所述第二移动组件,所述第三移动组件固定于所述第二驱动气缸的输出端,所述第三移动组件与所述第二移动组件通过所述第二滑轨滑动连接,所述第三驱动气缸的固定端安装于所述第三移动组件,所述校正组件安装于所述第三驱动气缸的输出端。
14.实施本发明实施例,与现有技术相比,具有如下有益效果:
15.本发明的用于天窗的取料机械手,使用时,通过移动装置将抓取装置移动至抓取天窗的预设位置,旋转组件将抓取装置转至预设的角度后,第一定位块和第三定位块与天窗的长边抵接,第二定位块和第四定位块与天窗的短边抵接,抓取组件将天窗抓起,通过第一定位块、第二定位块、第三定位块和第四定位块沿第一滑杆和第二滑杆滑动对天窗的位置进行调整,从而实现天窗的位置校正,既消除了天窗摆放时的位置误差,也可以通过校正组件对天窗夹紧,避免取料过程中发生晃动,影响校正的效果。
附图说明
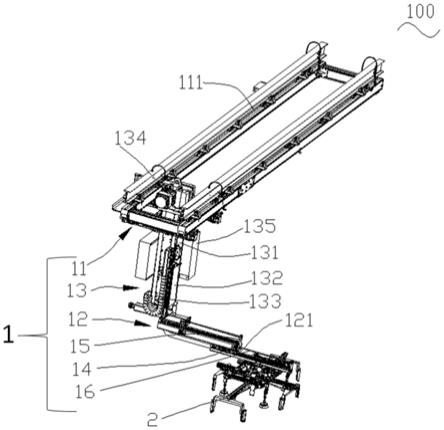
16.图1是本发明实施例所述的用于天窗的取料机械手的结构示意图。
17.图2是本发明实施例所述的抓取装置的结构示意图。
18.图3是本发明实施例所述的校正组件和第一驱动气缸的结构示意图。
19.图4是本发明实施例所述的用于天窗的取料机械手与天窗结合的结构示意图。
20.附图标记说明:
21.100、用于天窗的取料机械手,
22.1、移动装置,11、第一移动组件,111、第一滑轨,12、第二移动组件, 121、第二滑轨,13、竖直调节组件,131、升降板,132、滑板,133、拖链,134、电动葫芦,135、电控箱,14、第三移动组件,15、第二驱动气缸,16、第三驱动气缸,
23.2、抓取装置,21、抓取组件,22、校正组件,221、第一定位块,222、第二定位块,223、第三定位块,224、第四定位块,225、第一滑杆,226、第二滑杆,227、第一驱动气缸,23、旋转组件,24、锁止组件,25、感应器,
24.3、天窗。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗
示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.此外,本发明中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。
28.参照图1、图2、图3和图4,本实施例提供一种用于天窗的取料机械手100,包括移动装置1和抓取装置2,抓取装置2包括抓取组件21、校正组件22和旋转组件23,抓取装置2通过旋转组件23与移动装置1之间转动连接。校正组件 22包括第一定位块221、第二定位块222、第三定位块223、第四定位块224和彼此垂直的第一滑杆225、第二滑杆226,第一定位块221和第三定位块223分别滑动安装于第一滑杆225的两端,第二定位块222和第四定位块224分别安装于第二滑杆226的两端。使用时,通过移动装置1将抓取装置2移动至抓取天窗3的预设位置,旋转组件23将抓取装置2转至预设的角度后,第一定位块 221和第三定位块223与天窗3的长边抵接,第二定位块222和第四定位块224 与天窗3的短边抵接,抓取组件21将天窗3抓起,通过第一定位块221、第二定位块222、第三定位块223和第四定位块224沿第一滑杆225和第二滑杆226 滑动对天窗3的位置进行调整,从而实现天窗3的位置校正,既消除了天窗3 摆放时的位置误差,也可以通过校正组件22对天窗3夹紧,避免取料过程中发生晃动,影响校正的效果。
29.较佳的,如图4所示,在本实施例中,校正组件22包括第一驱动气缸227,第一定位块221、第二定位块222、第三定位块223和第四定位块224均与第一驱动气缸227连接,且通过第一驱动气缸227带动第一定位块221、第二定位块 222、第三定位块223和第四定位块224的滑动。通过第一驱动气缸227可以更精确地带动第一定位块221、第二定位块222、第三定位块223和第四定位块224 的滑动,减少对天窗3位置校正的过程中增加误差的可能性。
30.较佳的,如图3所示,在本实施例中,抓取装置2包括锁止组件24,锁止组件24动作时,第一定位块221、第二定位块222、第三定位块223、第四定位块224和抓取组件21为固定状态。可以通过锁止组件24对第一定位块221、第二定位块222、第三定位块223、第四定位块224和抓取组件21的锁定,防止在天窗3取料的过程中发生晃动甚至跌落的可能性,确保了天窗3取料的安全性和天窗3位置校正的可靠度。
31.较佳的,如图3所示,在本实施例中,抓取组件21为若干个真空吸盘。通过真空吸盘对天窗3进行抓取,可以减少在抓取的过程中对天窗3玻璃的损伤。在其他实施例中,也可以采用夹具或者其他抓取装置2对天窗3进行抓取。
32.较佳的,如图1所示,在本实施例中,移动装置1包括第一移动组件11和第二移动组件12,第一移动组件11包括水平设置的第一滑轨111,第二移动组件12包括水平设置的第二滑轨121,第二移动组件12滑设于第一移动组件11,校正组件22滑设于第二移动组件12,第一移动组件11与第二移动组件12垂直。通过彼此垂直的第一移动组件11和第二移动组件12带动抓取装置2移动,可以将经过抓取装置2取料的天窗3进行运输,也使得抓取装置2可以根据实际使用情况调整在平面内的位置。
33.较佳的,如图1所示,在本实施例中,第一移动组件11和第二移动组件12 之间设有竖直调节组件13,竖直调节组件13包括升降板131、滑板132、拖链 133、电动葫芦134和电控
箱135,升降板131的一端安装于第一滑轨111,第二滑轨121安装于滑板132远离升降板131的一端,升降板131和滑板132之间通过拖链133连接和带动滑板132的升降,电动葫芦134设于升降板131的上端用于带动拖链133的移动,电控箱135设于升降板131的侧表面用于控制电动葫芦134,抓取装置2的下表面设有与电控箱135电连接的感应器25,感应器25与天窗3接触或达到预设距离时,电控箱135控制电动葫芦134停止动作。抓取装置2移动至需要取料的天窗3后,电动葫芦134带动拖链133使得滑板132向下移动,从而带动第二移动组件12和抓取装置2下降,位于抓取装置2的下表面的感应器25与天窗3接触或达到预设距离时,电控箱135控制电动葫芦134停止动作,使得抓取装置2停止下降,防止抓取装置2对天窗3造成压伤。完成对天窗3的抓取后,电动葫芦134带动抓取装置2上升,从而实现对天窗3的取料。通过电动葫芦134、电控箱135和拖链133可以更平稳地控制抓取装置2的上升或下降,减少作业的过程中发生晃动。
34.较佳的,如图1所示,在本实施例中,移动装置1还包括第三移动组件14、第二驱动气缸15和第三驱动气缸16,第二驱动气缸15的固定端安装于第二移动组件12,第三移动组件14固定于第二驱动气缸15的输出端,第三移动组件 14与第二移动组件12通过所述第二滑轨121滑动连接,第三驱动气缸16的固定端安装于第三移动组件14,校正组件22安装于第三驱动气缸16的输出端。通过第三移动组件14可以增加第二移动组件12控制的抓取装置2的移动距离。通过第二驱动气缸15和第三驱动气缸16分别控制第二移动组件12和第三移动组件14,也使得抓取天窗3的过程中可以更加平稳。
35.本实施例所提供的一种用于天窗的取料机械手,在使用时,通过第一移动组件、第二移动组件和第三移动组件将抓取装置移动到需要取料的天窗的上方,电控箱控制电动葫芦驱动拖链从而使抓取装置下降,感应器与天窗接触或到达预设距离后,抓取装置停止下降,此时将第一定位块和第三定位块与天窗的长边抵接,第二定位块和第四定位块与天窗的短边抵接,若干个真空吸盘吸住天窗,天窗在第一定位块、第二定位块、第三定位块和第四定位块的作用下完成位置的校正,由锁止组件将校正组件和抓取组件锁定后,天窗在第一移动组件、第二移动组件、第三移动组件和竖直调节组件的作用下完成取料。
36.本实施例的用于天窗的取料机械手,具有以下有益效果:
37.一、使用时,通过移动装置将抓取装置移动至抓取天窗的预设位置,旋转组件将抓取装置转至预设的角度后,第一定位块和第三定位块与天窗的长边抵接,第二定位块和第四定位块与天窗的短边抵接,抓取组件将天窗抓起,通过第一定位块、第二定位块、第三定位块和第四定位块沿第一滑杆和第二滑杆滑动对天窗的位置进行调整,从而实现天窗的位置校正,既消除了天窗摆放时的位置误差,也可以通过校正组件对天窗夹紧,避免取料过程中发生晃动,影响校正的效果。
38.二、通过第一移动组件、第二移动组件和第三移动组件控制抓取装置在水平方向上移动,通过竖直调节组件控制抓取装置在竖直方向上移动,既使得该取料机械手可以用于对天窗的搬运,也使得该取料机械手适用于不同位置摆放的天窗。
39.三、通过驱动气缸可以更稳定地控制第二移动组件、第三移动组件和抓取装置,使得抓取装置可以更为稳定地移动,第一定位块、第二定位块、第三定位块和第四定位块更平稳地对天窗位置进行校正。
40.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员
来说,在不脱离本发明原理的前提下,还可以做出若干改进和变形,这些改进和变形也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。