1.本发明属于飞行器试验靶场测控领域,具体涉及一种基于无人机平台的全空域相控阵测控系统指标自动测试方法。
背景技术:
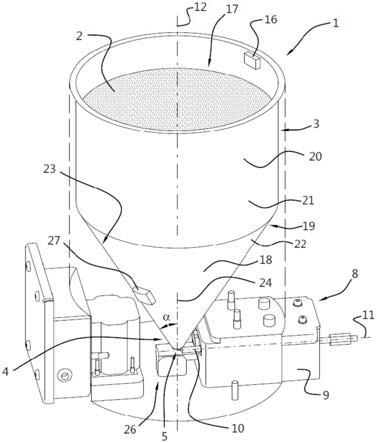
2.飞行器试验靶场测控系统是靶场飞行试验的重要分系统,遥测遥控系统外场测试属于飞行器试验靶场测控系统中的关键节点。根据测试需求和传统测试方案,对全空域相控阵系统的品质因数(g/t值)和等效全向辐射功率(eirp值)进行测试时,通常采取对塔测试模式,即架设标校塔对被测系统进行测试(如图1、图2所示)。
3.在外场试验条件下进行系统品质因数(g/t值)和等效全向辐射功率(eirp值)测试时,存在两方面问题:一是任务外场一般无标校塔和其他高层建筑物,不具备对塔标校条件;二是选用的测量仪器均需要人工操作,流程复杂,无法满足自动化测试要求。
技术实现要素:
4.进行全空域相控阵测控系统外场测试时,为降低对测试设施的要求,使其适用于外场测试环境,提高测试全面性和自动化水平,本发明提出了一种基于无人机平台的全空域相控阵测控系统指标(即等效全向辐射功率(eirp值)、接收品质因数(g/t值))自动测试方法。
5.本发明的测试方案主要包含接收品质因数(g/t值)(如图3所示)和等效全向辐射功率(eirp值)(如图4所示)的测试。主要分为以下三个步骤:
6.(一)确定测试条件
7.主要包括场区条件、设备参试条件、测试中的限制条件等内容。
8.(二)设计飞行轨迹
9.1.确定波束覆盖范围
10.首先,要根据全空域相控阵天线的具体形状来确定波束覆盖范围,这里以半球形共形相控阵天线为例。从半球形共形相控阵天线的法向切面看去,相控阵天线通过波束赋形覆盖的子空域在相控阵天线表面的投影近似为一个圆形,其覆盖范围在方位/俯仰角上不超过ψ
°
,超过这个区域后,两侧的天线单元对天线波束增益的贡献度很小,如图5
‑
1所示。
11.2.设计无人机遍历点
12.由于相控阵天线的波束增益对俯仰角较为敏感,在低仰角范围内天线波束投影形成圆的半径比高仰角范围内天线波束投影形成圆的半径要小,故覆盖的圆形更密。因此在设计无人机的飞行航迹时,在保证每个子空域都遍历的同时,还要考虑低仰角和高仰角对遍历点的影响,即分开设计低仰角和高仰角遍历点的方位和俯仰角。
13.由于一个有效的波束形成区域在相控阵表面的投影近似为一个圆形,为了保证相控阵天线对全空域的覆盖,选择多个圆外切于相控阵天线的表面进行覆盖,以达到近似等效的结果。圆的具体覆盖方法如图5
‑
2所示。
14.为了简化计算过程,使用圆的内切等边三角形在相控阵表面进行覆盖,为了尽可能的覆盖更多面积,三角形的底边紧贴于半球形共形相控阵天线与地面接触的位置。已知半球形相控阵天线的半径为r,相控阵天线通过波束赋形覆盖的子空域在相控阵天线表面投影的覆盖范围在方位/俯仰角上不超过ψ
°
。低仰角部分设置为x(x≤ψ),外切小圆半径为r=tan(x/2)
×
r,小圆的内切三角形边长为s=2
×
r
×
cos(30
°
);高仰角部分设置为y(x<y≤ψ),外切小圆半径为r1=tan(y/2)
×
r,小圆的内切三角形边长为s1=2
×
r1
×
cos(30
°
)。为保证对过顶空域的覆盖,无论根据俯仰角大小分为多少排,最高点的法向切线部分(e=90
°
)都设置一个小圆,该小圆的半径与高仰角部分的外切小圆的半径相等,该小圆的内切三角形边长与高仰角部分的外切小圆的内切三角形边长相等。
15.如图5
‑
2中第一排所示,首先以3/2个内切三角形边长为单位分为一组(以a和b为圆心形成两个圆形),按照这个方法分下去,每两组之间多出一个公共三角形区域需要覆盖,即多出一个圆形。一共要遍历的排数为m,通过数值仿真计算得到每一排最多可分n
m
组,每一排最多可排列的三角形数目(即内切三角形圆心数目)为q
m
=n
m
×
2 (n
m
‑
1),故某一排需要遍历的方位角度数为δ
m
=360/q
m
360/q
m
×
[0q
m
‑
1],再通过空间几何计算得到每排内切三角形圆心点的俯仰角θ
m
,综上,每个遍历点的坐标为(δ
m
,θ
m
),其中m=1,
…
,m。
[0016]
(三)测试过程
[0017]
1.接收品质因数(g/t值)测试(如图6所示)
[0018]
(1)准备过程
[0019]
步骤1:将全空域相控阵测控系统(后面简称被测系统)停在平坦空阔的场坪上,加电,自动调平;
[0020]
步骤2:天线升起,标定被测系统天线相位中心点坐标,并装订入测试软件;
[0021]
步骤3:无人机上的设备加电,设置信标机输出功率st和频率fg,通过标校天线输出s频段信号;
[0022]
步骤4:根据事先标定的发射馈线插损lt、标校天线增益gt,计算得到信标发射的eirp;
[0023]
eirp=st
‑
lt gt
ꢀꢀ
(1
‑
1)
[0024]
该公式中,eirp为标校塔等效全向辐射功率,st为标校塔发射信号功率,lt为标校塔馈线损耗,gt为标校塔发射天线增益;
[0025]
步骤5:无人机地面控制终端将无人机实时定位坐标发送至测试软件,测试软件根据被测系统天线相位中心坐标解算无人机和被测系统距离dg;
[0026]
步骤6:被测系统控制天线波束指向冷空,将接收链路增益调制最大,对收到的信号进行标定,测得噪声功率谱密度为n0,并装订入测试软件;
[0027]
步骤7:根据标校天线、被测天线极化方式和俯仰角角度,将极化损耗lp、大气及多径损耗la装订入测试软件。
[0028]
(2)跟踪过程
[0029]
步骤1:被测系统控制波束,对准无人机信标;
[0030]
步骤2:观察角误差解调情况,确保角误差解调正常;
[0031]
步骤3:若波束始终对准对应的信标,则放飞无人机。
[0032]
(3)测试过程
[0033]
步骤1:测试软件控制频谱仪,对收到的信号进行标定,测得信号功率sg,计算得到信噪比sg/n0;
[0034]
步骤2:测试软件利用被测系统坐标和无人机实时定位信息,计算两者之间直线距离,并根据测试使用的频率,计算出信号的空间传输损耗lg;
[0035]
lg=32.45 20lgfg(mhz) 20lgdg(km) (1
‑
2)
[0036]
步骤3:测试软件利用下式计算出在该角度、该频率下的g/t值:
[0037]
g/t=sg/n0‑
eirp lg la lp k (1
‑
3)
[0038]
该公式中k为玻尔兹曼常数。
[0039]
步骤4:选择无人机飞行轨迹中的多个遍历点,重复测试步骤(1)~(3),得到被测系统多个遍历点下的g/t值;
[0040]
步骤5:测试软件将系统g/t值以波束指向角度(俯仰角和方位角)作为索引进行存储。
[0041]
2.等效全向辐射功率(eirp值)测试(如图7所示)
[0042]
(1)准备工作
[0043]
步骤1:将被测系统停在平坦空阔的场坪上,加电,自动调平;
[0044]
步骤2:天线升起,标定被测系统天线相位中心坐标,并装订入测试软件;
[0045]
步骤3:无人机上搭载功率计,通过标校天线接收信号;
[0046]
步骤4:无人机地面控制终端将无人机实时定位数据发送至测试软件,测试软件根据被测系统天线相位中心坐标解算无人机和被测系统距离de;
[0047]
步骤5:将标校天线增益gr、标校天线和功率计之间的馈线损耗lr,装订入测试软件;
[0048]
步骤6:根据标校天线、被测天线极化方式和俯仰角角度,将极化损耗lp、大气及多径损耗la装订入测试软件。
[0049]
(2)跟踪过程
[0050]
步骤1:被测系统控制波束,对准无人机信标;
[0051]
步骤2:观察角误差解调情况,确保角误差解调正常;
[0052]
步骤3:若波束始终对准对应的信标,则放飞无人机。
[0053]
(3)测试过程
[0054]
步骤1:
[0055]
a)设置时钟本振源发射本振为低本振2150mhz,对应l频段发射,l频段频率设置为f1;
[0056]
b)设置时钟本振源发射本振为高本振2450mhz,对应s频段发射,s频段频率设置为f2;
[0057]
步骤2:被测系统控制天线波束指向无人机,测试软件设定输出功率值,被测系统输出单载波,信号功率为中强的信号;
[0058]
步骤3:无人机上的功率计收到信号后,调整被测系统输出功率为最大,将功率计测得的实时信号功率se通过反向链路回传给无人机控制终端,最后无人机控制终端通过试验网将实时信号功率转发至测试软件;
[0059]
步骤4:利用被测系统坐标、无人机坐标、测试用的频率,测试软件计算出信号的空间传输损耗le;
[0060][0061]
步骤5:利用下式计算出系统在该角度、该频率下的eirp值;
[0062]
eirp=se le la lp lr
‑
gr (1
‑
5)
[0063]
步骤6:选择无人机飞行过程中的多个遍历点,天线对无人机稳定跟踪,重复步骤(2)~(5),得到被测系统多个遍历点下的eirp值;
[0064]
步骤7:将系统eirp值以波束指向角度作为索引在测试软件中进行存储。
[0065]
本发明的优点在于:
[0066]
1.不需要复杂的基础设施,适用于外场测试需求,降低了测试成本;
[0067]
2.实现了全空域相控阵测控系统指标的自动化测试,相比传统方案简化了操作流程,降低了测试难度,提高了测试效率和测试精度;
[0068]
3.通过控制无人机的飞行轨迹,可以实现相控阵系统指标的自动测试,最后将测试结果按照波束指向角度进行存储,为之后的试验任务做好准备。
附图说明
[0069]
图1是传统接收品质因数(g/t值)测试方法。
[0070]
图2是传统等效全向辐射功率(eirp值)测试方法。
[0071]
图3是本发明设计的接收品质因数(g/t值)测试方法。
[0072]
图4是本发明设计的等效全向辐射功率(eirp值)测试方法。
[0073]
图5
‑
1是本发明中天线波束投影示意图。
[0074]
图5
‑
2是本发明中半球形共形相控阵天线外切小圆分布图。
[0075]
图6是本发明设计的接收品质因数(g/t值)测试方法的流程图。
[0076]
图7是本发明设计的等效全向辐射功率(eirp值)测试方法的流程图。
[0077]
图8是本发明中半球形共形相控阵天线半径和小圆的关系示意图。
具体实施方式
[0078]
全空域相控阵测控系统指标自动测试方法,针对遥测遥控系统外场测试时基础设施要求高、覆盖范围不够、测试流程复杂等难题,在对无人机的飞行轨迹进行规划,对无人机航迹上坐标点的g/t值和eirp值进行计算的基础上,将全空域相控阵测控系统指标自动测试方法分为确定测试条件、设计飞行轨迹、实施测试步骤三个部分,最终计算得到关键性能指标,为全空域相控阵遥测遥控系统的外场测试提供重要依据。
[0079]
实施例:
[0080]
参试设备包括一套全空域相控阵测控系统、一架无人机、一套基准站、一套无人机地面控制终端。
[0081]
(一)确定测试条件
[0082]
一架搭载有s频段信标机、标校天线、具有gps定位功能的无人机;
[0083]
一套能够与无人机建立通信和控制链路的地面控制终端。
[0084]
(二)设计飞行轨迹
[0085]
1.确定波束覆盖范围
[0086]
以半球共形相控阵天线为例,其天线波束覆盖范围在方位/俯仰角上不超过ψ=60。
[0087]
2.设计无人机遍历点
[0088]
选择圆的内切等边三角形在相控阵表面进行覆盖,三角形的底面紧贴于半球形共形相控阵天线与地面接触的位置。已知半球形相控阵天线的半径为r=1m。低仰角部分(第一排)设置为x=30
°
,小圆的半径r≈0.27m,内切三角形的边长s≈0.46m;高仰角部分设置为y=40
°
,小圆半径r1≈0.36m,内切三角形的边长s1≈0.63m(如图8所示)。为保证对过顶空域的覆盖,无论根据俯仰角大小分为多少排,最高点的法向切线部分e=90
°
都设置一个小圆,小圆半径和小圆的内切三角形边长与高仰角部分设置相同。
[0089]
小圆覆盖完半球表面后,对于每排小圆以3/2个内切三角形边长为单位分为一组,按照这个方法分下去,每两组之间多出一个公共三角形区域需要覆盖,此处需要多累加一个。通过数值仿真计算得到每一排最多排列的等边三角形数目分别为q1=26、q2=11、q3=5、q4=2、q5=1,一共要遍历的排数为m=5。
[0090]
通过计算,半球形共形相控阵天线第一排最多排列26个三角形,以三角形中心点为无人机遍历点,其方位角和俯仰角分别为:(13.8,7.5)(27.6,7.5)(41.4,7.5)(55.2,7.5)(69,7.5)(82.8,7.5)(96.6,7.5)(110.4,7.5)(124.2,7.5)(138,7.5)(151.8,7.5)(165.6,7.5)(179.4,7.5)(193.2,7.5)(207,7.5)(220.8,7.5)(234.6,7.5)(248.4,7.5)(262.2,7.5)(276,7.5)(289.8,7.5)(303.6,7.5)(317.4,7.5)(331.2,7.5)(345,7.5)(358.8,7.5);
[0091]
半球形共形相控阵天线第二排最多排列11个三角形,以三角形中心点为无人机遍历点,其方位角和俯仰角分别为:(32.7,26.1)(65.4,26.1)(98.1,26.1)(130.8,26.1)(163.5,26.1)(196.2,26.1)(228.9,26.1)(261.6,26.1)(294.3,26.1)(327,26.1)(359.7,26.1);
[0092]
半球形共形相控阵天线第三排最多排列5个三角形,以三角形中心点为无人机遍历点,其方位角和俯仰角分别为:(72,53.1)(144,53.1)(216,53.1)(288,53.1)(360,53.1);
[0093]
半球形共形相控阵天线第四排最多排列2个三角形,以三角形中心点为无人机遍历点,其方位角和俯仰角分别为:(180,80.1)(360,80.1);
[0094]
半球形共形相控阵天线第五排最多排列1个三角形,以三角形中心点为无人机遍历点,其方位角和俯仰角为:(0,90).
[0095]
(三)实施测试步骤
[0096]
1.接收品质因数(g/t值)测试
[0097]
(1)准备过程
[0098]
步骤1:将被测系统(l=87.49539b=41.72695h=1165)停在平坦空阔的场坪上,加电,自动调平;
[0099]
步骤2:天线升起,标定被测系统天线相位中心点坐标,并装订入测试软件;
[0100]
步骤3:无人机上的设备加电,设置信标机输出功率st,通过标校天线输出s频段信
号,其频点为fg=2206.25mhz;
[0101]
步骤4:根据事先标定的发射馈线插损lt=3.3dbw、标校天线增益gt=15dbw,利用下式计算得到信标发射的eirp=
‑
72.6;
[0102]
eirp=st
‑
lt gt (1
‑
1)
[0103]
该公式中,erip为标校塔等效全向辐射功率,st为标校塔发射信号功率,lt为标校塔馈线插损,gt为标校塔发射天线增益;
[0104]
步骤5:无人机地面控制终端将无人机实时定位数据发送至测试软件,测试软件根据被测系统天线相位中心坐标解算无人机和被测系统距离dg;
[0105]
步骤6:被测系统控制天线波束指向冷空,将接收链路增益调制最大,对收到的信号进行标定,测得噪声功率谱密度为n0,并装订入测试软件;
[0106]
步骤7:根据标校天线、被测天线极化方式和俯仰角角度,将极化损耗lp=3dbw,大气及多径损耗la=1dbw装订入测试软件。
[0107]
(2)跟踪过程
[0108]
步骤1:被测系统控制波束,对准无人机信标;
[0109]
步骤2:观察角误差解调情况,确保角误差解调正常;
[0110]
步骤3:若波束始终对准对应的信标,则放飞无人机。
[0111]
(3)测试过程
[0112]
步骤1:测试软件控制频谱仪,对收到的信号进行标定,测得信号功率sg,计算得到信噪比sg/n0;
[0113]
步骤2:测试软件利用被测系统坐标和无人机实时定位信息,计算两者之间直线距离,并根据测试使用的频率,利用下式计算出信号的空间传输损耗lg;
[0114]
lg=32.45 20lgfg(mhz) 20lgdg(km) (1
‑
2)
[0115]
步骤3:测试软件利用下式计算出在该角度、该频率下的g/t值。
[0116]
g/t=sg/n0‑
eirp lg la lp k (1
‑
3)
[0117]
其中k为玻尔兹曼常数,k=
‑
228.6dbw/hz/k;
[0118]
步骤4:选择无人机飞行轨迹中的多个遍历点,重复测试步骤(1)~(3),得到被测系统多个遍历点下的g/t值;
[0119]
步骤5:测试软件将系统g/t值以波束指向角度(俯仰角和方位角)作为索引进行存储。
[0120]
(4)数据记录
[0121]
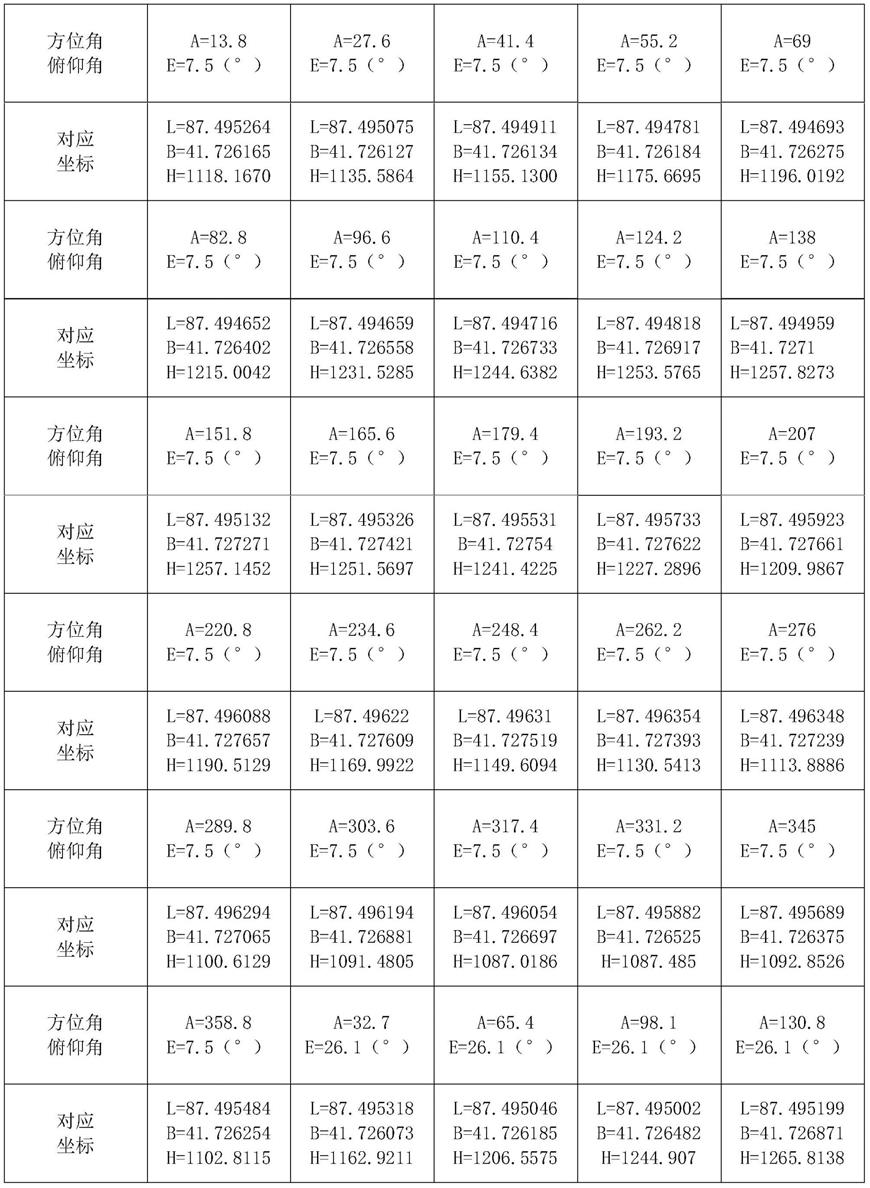
无人机绕被测系统测试完毕后,从无人机控制终端向测试软件转发的定位坐标中筛选以下遍历点进行保存,如表1
‑
1所示。
[0122]
表1
‑
1g/t值测试关键遍历点坐标一览表
[0123]
[0124][0125]
信标机工作频点fg=2206.25mhz,接收系统品质因数(g/t值)测试记录如表1
‑
2所示。
[0126]
表1
‑
2接收系统品质因数测试记录表
[0127]
[0128]
[0129][0130]
2.等效全向辐射功率(eirp值)测试
[0131]
(1)准备过程
[0132]
步骤1:将被测系统(l=87.49539b=41.72695h=1165)停在平坦空阔的场坪上,加电,自动调平;
[0133]
步骤2:天线升起,标定被测系统天线相位中心坐标,并装订入测试软件;
[0134]
步骤3:无人机上搭载功率计,通过标校天线接收信号。
[0135]
步骤4:无人机地面控制终端将无人机实时定位数据发送至测试软件,测试软件根据被测系统天线相位中心坐标解算无人机和被测系统距离de。
[0136]
步骤5:被测系统发射信号频率为f1=1765mhz时,对应标校天线增益为gr=15dbw;被测系统发射信号频率为f2=2025mhz时,对应标校天线增益为gr=16.5dbw、标校天线和功率计之间的馈线损耗lr=3dbw,装订入测试软件;
[0137]
步骤6:根据标校天线、被测天线极化方式和俯仰角角度,将极化损耗lp=3dbw、大气及多径损耗la=1装订入测试软件。
[0138]
(2)跟踪过程
[0139]
步骤1:被测系统控制波束,对准无人机信标;
[0140]
步骤2:观察角误差解调情况,确保角误差解调正常;
[0141]
步骤3:若波束始终对准对应的信标,则放飞无人机。
[0142]
(3)测试过程
[0143]
步骤1:
[0144]
a)设置时钟本振源发射本振为低本振2150mhz,对应l频段发射,频率设置为f1=1765mhz;
[0145]
b)设置时钟本振源发射本振为高本振2450mhz,对应s频段发射,频率设置为f2=2025mhz;
[0146]
步骤2:被测系统控制天线波束指向无人机,测试软件设定输出功率值,被测系统输出单载波,信号功率为中强的信号;
[0147]
步骤3:无人机上的功率计收到信号后,调整被测系统输出功率为最大,将功率计测得的实时信号功率se通过反向链路回传给无人机控制终端,最后无人机控制终端通过试验网将实时信号功率转发至被测系统;
[0148]
步骤4:利用被测系统坐标、无人机坐标、测试用的频率f1/f2,测试软件计算出信号的空间传输损耗le;
[0149]
步骤5:利用下式计算出系统在该角度、该频率下的eirp值;
[0150]
eirp=se le la lp lr
‑
gr (1
‑
4)
[0151]
步骤6:选择无人机飞行过程中的多个遍历点,天线对无人机稳定跟踪,重复步骤(2)~(5),得到被测系统多个遍历点下的eirp值;
[0152]
步骤7:将系统eirp值以波束指向角度作为索引在测试软件中进行存储。
[0153]
(4)数据记录
[0154]
被测系统使用l频段发射信号,无人机绕被测系统测试完毕后,从无人机控制终端向测试软件转发的定位坐标中筛选出以下遍历点进行保存,如表1
‑
3所示。
[0155]
表1
‑
3eirp值测试关键遍历点坐标一览表
[0156]
[0157]
[0158][0159]
被测系统工作频点为1765mhz,等效全向辐射功率(eirp值)测试记录如表1
‑
4所示。
[0160]
表1
‑
4等效全向辐射功率测试记录表(f1=1765mhz)
[0161]
[0162]
[0163][0164]
被测系统使用s频段发射信号,无人机绕被测系统测试完毕后,从无人机控制终端向测试软件转发的定位坐标中筛选出确定遍历点进行保存,如表1
‑
3所示。
[0165]
被测系统工作频点为2025mhz,等效全向辐射功率(eirp值)测试记录如表1
‑
5所示。
[0166]
表1
‑
5等效全向辐射功率测试记录表(f2=2025mhz)
[0167]
[0168]
[0169][0170]
上述实施例仅示例性说明本发明的方法步骤及其核心思想,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。