1.本发明涉及测量装置技术领域,特别涉及一种测量运动牲畜重量的装置。
背景技术:
2.人工养殖牲畜过程中经常需要对牲畜体重进行称量,以掌握牲畜的生长状况及生长速度。
3.目前多通过随机挑选几只牲畜进行抽样称重,随后进行判断,这种称重方式需要多人协助将牲畜抬送至称重台上,在称重的时候还需要人为协助保持牲畜不动才能得到较为准确的重量。
4.实际状态下,牲畜在感受到有人靠近并相接近自己时往往是会保持持续运动以免被捉到,这就为静态称重带来了巨大的障碍,如何对运动的牲畜进行称重是目前所要解决的技术问题。
技术实现要素:
5.本发明提供一种测量运动牲畜重量的装置,可以对运动的牲畜进行称重。
6.本发明提供了一种测量运动牲畜重量的装置,包括:
7.固定台,沿其周向均布有多个用于感应牲畜的感应器,固定台上转动连接有转动台,转动台上固定有引诱牲畜的引诱件;
8.速度传感器,固定于引诱件的侧壁;
9.称重机构,通过驱动件驱动使其沿转动台的半径方向往复移动,速度传感器位于称重机构所在的转动台的半径方向上,称重机构上设置有追踪牲畜位置的位置追踪件,转动台根据感应器感应到的牲畜进行转动使称重机构与感应器所在的方位一致。
10.可选的,凹槽的槽口封闭有盖板,称重机构连接于盖板的下方。
11.可选的,称重机构包括:
12.滑动块,下端通过驱动件与凹槽的槽底滑动配合,滑动块的侧壁与凹槽的槽壁滑动配合,位置追踪件固定于滑动块上;
13.压力传感器,固定于滑动块上,压力传感器与微处理器信号连接。
14.可选的,引诱件的侧面还固定有引诱剂,引诱剂位于速度传感器的正上方,引诱剂能发出引诱牲畜的气味。
15.可选的,位置追踪件为位置传感器,用于追踪牲畜的位置,位置传感器与微处理器信号连接。
16.可选的,固定台靠近边缘处固定有环形承载座,环形承载座位于转动台的外周,环形承载座的上端沿其轴向均匀开设有多个放置槽,感应器固定于放置槽内。
17.可选的,环形承载座的上端面为从内周向外周向下倾斜的坡面。
18.可选的,固定台和转动台之间连接有导向件,以使转动台稳定转动。
19.可选的,导向件包括:
20.环形板,固定于固定台的上端面,环形板的上端面开设有多个安装槽,每个安装槽内通过铰接座铰接有一滚球;
21.环形限位槽,开设于转动台的下端面,环形板的上端插入环形限位槽内,滚球与环形限位槽的槽底接触。
22.与现有技术相比,本发明的有益效果在于:本发明通过设置的引诱件能够将牲畜引诱至固定台上,在固定台上的感应器能够感应到牲畜具体位于固定台的哪个方位,再通过控制转动台转动,使称重机构与牲畜所在的位置相一致,此时称重机构位于转动台的边缘,则动物被引诱件吸引向其靠近的过程中会沿着称重机构的移动方向移动,在此过程中,位置追踪件实时追踪牲畜位置则使驱动件驱动称重机构随着牲畜的移动始终处于牲畜所在处的下方对其进行称重,期间,速度传感器实时检测牲畜速度,当牲畜靠近引诱件时速度降为零,此时速度传感器检测到的速度为零,则将此时称重机构称取的重量进行记录,得到了牲畜的重量,应用本发明装置可以吸引牲畜使其主动登上称重机构,并将其在称重时的状态从动态转为静态,避免了称重过程中的误差,同时能克服传统的称重方式中的需要多人协助来控制并保持牲畜身体静态的问题。
附图说明
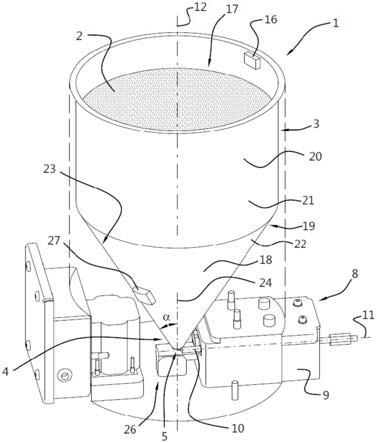
23.图1为本发明实施例提供的一种测量运动牲畜重量的装置的主视图;
24.图2为本发明实施例提供的一种测量运动牲畜重量的装置的俯视图;
25.图3为图1中g处的局部结构放大示意图;
26.图4为图1中h处的局部结构放大示意图;
27.图5为本发明实施例提供的导向件的结构示意图。
28.附图标记说明:
[0029]1‑
固定台,2
‑
转动件,3
‑
转动台,4
‑
引诱件,5
‑
凹槽,6
‑
感应器,7
‑
速度传感器,8
‑
称重机构,80
‑
滑动块,81
‑
压力传感器,9
‑
驱动件,10
‑
位置追踪件,11
‑
盖板,12
‑
引诱剂,13
‑
环形承载座,14
‑
放置槽,15
‑
导向件,150
‑
环形板,151
‑
安装槽,152
‑
滚球,153
‑
环形限位槽。
具体实施方式
[0030]
下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
[0031]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明的技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0032]
如图1
‑
2所示,本发明实施例提供的一种测量运动牲畜重量的装置,包括:固定台1、速度传感器7、称重机构8、微处理器和电源,固定台1靠近外边缘处沿其周向均布有多个感应器6,感应器6用于感应是否有牲畜,固定台1的中心通过转动件2转动连接有转动台3,转动台3上固定有引诱件4,引诱件4用于将牲畜引诱至其所在处,转动台3上具有沿其半径方向开设的凹槽5,速度传感器7固定于引诱件4的侧壁靠近底端处,用于测量牲畜的运动速
度,速度传感器7位于凹槽5所在的区域内,称重机构8通过驱动件9驱动使其沿凹槽5的长度方向往复移动,称重机构8用于称取牲畜的重量,称重机构8上设置有位置追踪件10,位置追踪件10用于实时追踪牲畜所在的位置,微处理器与转动件2、感应器6、速度传感器7、称重机构8、驱动件9及位置追踪件10分别信号连接,当感应器6感应到牲畜后,则微处理器控制转动件2带动固定台1转动以使凹槽5与感应器6位置对应,驱动件9带动位置追踪件10及称重机构8始终位于牲畜所在处,当速度传感器7检测到速度为零时,微处理器记录此时称重机构8称取的重量,电源分别与转动件2、称重机构8、驱动件9及微处理器电连接,在本实施例中,每个感应器6在微处理器中都有相应的序号,每个序号代表其与标准线之间的夹角值,微处理器根据接收到的感应器6的信号即可知道其与标准线之间的夹角,此标准线即为速度传感器7所在的转动台3的半径处,则控制转动件2转动此夹角即可使速度传感器7、凹槽5与牲畜所在的感应器6位于同一区域,在本实施例中,转动件2可以为旋转电机,感应器6可以为热敏传感器或力敏传感器等,即只要能根据变化值感知到牲畜即可。
[0033]
本发明通过设置的引诱件能够将牲畜引诱至固定台上,在固定台上的感应器能够感应到牲畜具体位于固定台的哪个方位,再通过微处理器控制转动件转动带动转动台转动,使凹槽与牲畜所在的位置相一致,此时称重机构位于转动台的边缘,则动物被引诱件吸引向其靠近的过程中会沿着凹槽的方向移动,在此过程中,位置追踪件实时追踪牲畜位置则使驱动件驱动称重机构随着牲畜的移动始终处于牲畜所在处的下方对其进行称重,期间,速度传感器实时检测牲畜速度,当牲畜靠近引诱件时速度降为零,此时速度传感器检测到的速度为零,则微处理器将此时称重机构称取的重量进行记录,得到了牲畜的重量,应用本发明装置可以吸引牲畜使其主动登上称重机构,并将其在称重时的状态从动态转为静态,避免了称重过程中的误差,同时能克服传统的称重方式中的需要多人协助来控制并保持牲畜身体静态的问题。
[0034]
为了使牲畜沿凹槽5行走过程中不会与称重机构8脱离,同时避免称重时牲畜只有单只脚或局部位于称重机构8上,在本实施例中,凹槽5的槽口封闭有盖板11,称重机构8连接于盖板11的下方,这样牲畜在向引诱件4靠近的过程中始终行走在盖板11上,且盖板始终位于称重机构8上则能够准确测量出牲畜重量,在本实施例中的引诱件4可以为动物喜欢的食物等。
[0035]
参考图3,称重机构8包括:滑动块80和压力传感器81,滑动块80下端通过驱动件9与凹槽5的槽底滑动配合,滑动块80的侧壁与凹槽5的槽壁滑动配合,位置追踪件10固定于滑动块80上,压力传感器81固定于滑动块80上,压力传感器81与微处理器信号连接。
[0036]
通过滑动块80能够将压力传感器81和位置追踪件10固定在其上,通过驱动件9使其沿凹槽5移动,位置追踪件10保证了滑动块80始终与牲畜同步移动,从而保证了压力传感器81始终能够检测到牲畜施加在盖板11上的压力值,通过微处理器将其换算为质量即可得到牲畜的重量,本实施例中,驱动件9可以为电机带动滚轮移动,通过滑动块80与凹槽5的槽壁滑动配合可以保证滑动块80平稳移动不会出现偏差,进一步保证压力传感器81始终能够检测到牲畜施加在盖板11上的压力值。
[0037]
为了避免牲畜在沿着盖板11向引诱件4靠近的过程中更改路线,引诱件4的侧面还固定有引诱剂12,引诱剂12位于速度传感器7的正上方,引诱剂12能发出引诱牲畜的气味,通过引诱剂12发出浓烈的气味吸引牲畜沿盖板11方向向速度传感器7所在的方向移动,进
一步保证了压力传感器81始终能够检测到牲畜施加在盖板11上的压力值,同时保证了速度传感器7能够检测到牲畜的运动速度。
[0038]
可选的,位置追踪件10为位置传感器,用于追踪牲畜的位置,位置传感器与微处理器信号连接。
[0039]
参考图4,固定台1靠近边缘处固定有环形承载座13,环形承载座13位于转动台3的外周,环形承载座13的上端沿其轴向均匀开设有多个放置槽14,感应器6固定于放置槽14内,一方面保护了感应器6,同时避免感应器6凸起牲畜不愿踩踏在其上。
[0040]
可选的,环形承载座13的上端面为从内周向外周向下倾斜的坡面,牲畜可以顺着斜坡走向转动台3,直接过渡避免牲畜中途改变线路。
[0041]
为了保证转动台3在转动时的稳定性,避免出现过大晃动导致牲畜受惊不愿登上转动台3,固定台1和转动台3之间连接有导向件15,以使转动台3稳定转动。
[0042]
参考图5,导向件15包括:环形板150和环形限位槽153,环形板150固定于固定台1的上端面,环形板150的上端面开设有多个安装槽151,每个安装槽151内通过铰接座铰接有一滚球152,环形限位槽153开设于转动台3的下端面,环形板150的上端插入环形限位槽153内,滚球152与环形限位槽153的槽底接触。
[0043]
滚球152将环形板150与环形限位槽153之间的滑动摩擦转为滚动摩擦,可以进一步减小摩擦力,使转动台3平稳转动的过程中尽可能少的受力,这样就可以避免过大晃动导致牲畜受惊不愿登上转动台3。
[0044]
以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。