1.本发明涉及胶囊内窥镜领域,特别是一种便于通过图像确定拍摄时姿态的胶囊内镜及方法。
背景技术:
2.在胶囊内窥镜内设有图像传感器,例如ccd或cmos元件,可以观察人体体腔内的图像,具体的,当被检查者吞入胶囊内窥镜,则胶囊内窥镜在通过消化道的过程中,能够拍摄到消化道内的图像,并存储或传输出来,以供观察消化道的图像。例如中国专利文献cn101043838a中记载的胶囊型内窥镜。但是当胶囊内窥镜位于胃部或肠道内时,要确定胶囊内窥镜的姿态是比较困难的,从而胶囊内窥镜拍摄的图像的具体位置造成较大难度。日本特开2007
‑
000608号公报、日本特表2010
‑
524557号公报和中国专利文献cn 106922121 a记载了在胶囊内窥镜内置加速度传感器或陀螺仪以检测胶囊内窥镜姿态的方案,但是,由于胶囊内窥镜内的空间有限,这些传感器以及供给传感器的电源部件,增大了胶囊内窥镜的体积。cn 103347431 a记载了阵列的无线接收器根据胶囊内窥镜的无线单元的信号强度判断胶囊型内窥镜的姿态的方案。但是该系统较为复杂,而且人体可以被简单的视为一种阻容电路结构,不同的人的个体以及人体的不同组织对电信号的干扰均存在差异,因此要排除这些干扰获得精确的无线单元的信号强度也是困难的。而加大无线单元的信号强度又会增加电源的体积。cn 111035349 a记载了在胶囊内窥镜内部提供内部磁场;根据外部磁场和内部磁场获得磁场数据;获得胶囊内窥镜的加速度数据;以及当外部磁场的极化方向处于水平状态时,根据加速度数据获得姿态信息,当外部磁场的极化方向处于非水平状态时,根据加速度数据和磁场数据获得胶囊内窥镜的姿态信息。在胶囊内窥镜之内建立可被检测的内部磁场也是较为困难的。可见目前尚无较为简便和便于实现的检测胶囊型内窥镜的姿态的方案。
技术实现要素:
3.本发明所要解决的技术问题是提供一种便于通过图像确定拍摄时姿态的胶囊内镜及方法,能够方便的确定胶囊内窥镜在人体内的姿态,且体积小,实现方便。
4.为解决上述技术问题,本发明所采用的技术方案是:一种便于通过图像确定拍摄时姿态的胶囊内镜,在壳体前端设有弧形的透明罩,透明罩内设有光学镜头,光学镜头之后设有图像传感器,图像传感器与图像处理器电连接,图像处理器与射频模块电连接,射频模块与天线电连接;还设有用于供电的电池;在透明罩内设有受重力或磁力影响的方位标记物,方位标记物与透明罩连接,方位标记物与透明罩的连接位置位于透明罩的中心与边缘之间。
5.优选的方案中,所述的方位标记物为链,链与透明罩的连接位置位于透明罩的中心与边缘之间。
6.优选的方案中,在链的自由端设有磁性球,磁性球用于在外加的水平磁场中得出偏转角;所述的水平磁场是指位于体外的,与磁性球之间大致为水平方向的磁铁产生的磁场;磁铁为永磁铁或电磁铁。
7.优选的方案中,所述的链为偶数条,分组后,每组两条;在每组链中,有一条链的自由端设有磁性球,另一条链不设磁性球,磁性球用于在外加的水平磁场中得出偏转角;所述的水平磁场是指位于体外的,与磁性球之间大致为水平方向的磁铁产生的磁场;磁铁为永磁铁或电磁铁。
8.优选的方案中,所述的方位标记物包括透明的球壳,球壳内设有重力球或磁性球;由重力球或磁性球在球壳内的位置得出俯仰角和翻滚角;磁性球用于在外加的水平磁场中得出偏转角;所述的水平磁场是指位于体外的,与磁性球之间大致为水平方向的磁铁产生的磁场;磁铁为永磁铁或电磁铁。
9.优选的方案中,所述的球壳为一个或多个。
10.优选的方案中,所述的方位标记物包括透明的球壳,球壳内设有磁性球,球壳内还设有透明液体,透明液体与球壳之间形成气泡;由气泡在球壳内的位置得出俯仰角和翻滚角;磁性球用于在外加的水平磁场中得出偏转角;磁性球的比重与球壳内的液体的比重相同,以使磁性球不会受到重力的影响,只受到磁力的影响;所述的水平磁场是指位于体外的,与磁性球之间大致为水平方向的磁铁产生的磁场;磁铁为永磁铁或电磁铁。
11.优选的方案中,还设有外部的姿态传感器,姿态传感器附着在人体上,用于检测人体的姿态。
12.一种采用上述的便于通过图像确定拍摄时姿态的胶囊内镜的姿态确定方法,包括以下步骤:s1、启用磁铁,拍摄图像,识别图像中链的位置,根据磁铁的方向结合人体姿态,分辨每组链中设有磁性球的链和不设磁性球的链;s2、根据不设磁性球链的长度,和链与各个链的根部构成的连接圆之间的相对位置得出俯仰角;若位于顶部位置的链的自由端至少有1个位于连接圆之内,其余位于连接圆之外,则胶囊内窥镜的俯仰角在大于
‑
90
°
和小于90
°
之间,根据链的长度计算得到俯仰角的角度值;连接圆是指经过链的根部与透明罩的圆心同心的圆;
根据链的根部相对于透明罩的圆心转角位置得出翻滚角;当链的自由端均位于连接圆之内,若链的成像长度大于一定值,则判断胶囊内窥镜的方向朝下,若链的成像长度小于一定值,则判断胶囊内窥镜的方向朝上,所述的定值为胶囊内窥镜朝上时,链的最大长度;s3、根据设磁性球链的长度,和链与各个链的根部构成的连接圆之间的相对位置得出相对于磁铁的偏转角;若位于远离磁铁的位置的链的自由端至少有1个位于连接圆之内,其余位于连接圆之外,则胶囊内窥镜的偏转角在大于
‑
90
°
和小于90
°
之间,根据顶部或底部位置的链的长度计算得到偏转角的角度值;当链的自由端均位于连接圆之内,若链的成像长度大于一定值,则判断胶囊内窥镜的光学镜头的轴线方向垂直指向磁铁,若链的成像长度小于一定值,则判断胶囊内窥镜的光学镜头的轴线方向远离磁铁,并与磁铁垂直;通过以上步骤确定胶囊内窥镜在人体内的姿态。
13.一种采用上述的便于通过图像确定拍摄时姿态的胶囊内镜的姿态确定方法,包括以下步骤:s1、启用磁铁,拍摄图像,识别图像中重力球或气泡的位置,根据重力球或气泡在球壳内的位置得出俯仰角,根据近大远小的原理得出俯仰角的正负值;s2、根据球壳在图像中相对于透明罩的圆心转角位置得出翻滚角;s3、根据磁性球在球壳内的位置得出相对于磁铁的偏转角,根据近大远小的原理得出偏转角的正负值;通过以上步骤确定胶囊内窥镜在人体内的姿态。
14.本发明提供的一种便于通过图像确定拍摄时姿态的胶囊内镜及方法,通过在透明罩位置设置的链的结构,能够方便获取胶囊内窥镜的俯仰角和翻滚角,优选的方案中,通过外设的磁铁形成一水平的磁场,配合链端头的磁性球,能够获得胶囊内窥镜的偏转角,从而准确得到胶囊内窥镜的姿态。另一可选的方案中,通过设置在球壳内的磁性球、重力球或气泡,以更少的图像干扰准确得到胶囊内窥镜的姿态。
附图说明
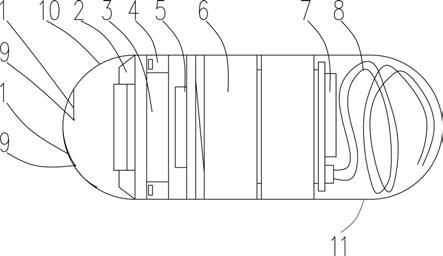
15.下面结合附图和实施例对本发明作进一步说明:图1为本发明的结构示意图。
16.图2为本发明的胶囊内窥镜处于水平位置时链的示意图。
17.图3为本发明的胶囊内窥镜处于俯下位置时链的示意图。
18.图4为本发明的胶囊内窥镜处于仰起位置时链的示意图。
19.图5为本发明的胶囊内窥镜的翻滚角的示意图。
20.图6为本发明的胶囊内窥镜的在磁铁磁场内的偏转示意图。
21.图7为本发明的胶囊内窥镜的在磁铁磁场内的偏转至靠近磁铁时的示意图。
22.图8为本发明的胶囊内窥镜的在磁铁磁场内的偏转至远离磁铁时的示意图。
23.图9为本发明的胶囊内窥镜的在磁铁磁场和重力场内链的状态示意图。
24.图10为本发明的胶囊内窥镜另一优选的结构在磁铁磁场和重力场内的状态示意
图。
25.图11为本发明的胶囊内窥镜另一优选的结构在磁铁磁场和重力场内的状态示意图。
26.图中:链1,光学镜头2,图像传感器3,闪光灯4,图像处理器5,电池6,射频模块7,天线8,磁性球9,透明罩10,壳体11,连接圆12,十字线13,磁铁14,球壳15,重力球16,气泡17。
具体实施方式
27.实施例1:胶囊内窥镜的姿态由俯仰角、翻滚角和偏转角确定,所述的俯仰角是指胶囊内窥镜在xz平面内与水平面的夹角。翻滚角是胶囊内窥镜相对自身轴线的转角,偏转角是指胶囊内窥镜在xy平面内与垂直面的夹角。胶囊内窥镜的位置也可以由床边ct快速获得。由此组合,胶囊内窥镜的位置和姿态即可明确,由位置和姿态与胶囊内窥镜拍摄的图像之间在时间上的联系,即可确定胶囊内窥镜拍摄的图像在人体内腔的具体对应位置。
28.如图1中,一种便于通过图像确定拍摄时姿态的胶囊内镜,在壳体10前端设有弧形的透明罩10,透明罩10内设有光学镜头2,光学镜头2之后设有图像传感器3,图像传感器3与图像处理器5电连接,图像处理器5与射频模块7电连接,射频模块7与天线8电连接;还设有用于供电的电池6;在透明罩内设有受重力或磁力影响的方位标记物,方位标记物与透明罩连接,方位标记物与透明罩的连接位置位于透明罩的中心与边缘之间。
29.实施例2:在实施例1的基础上,优选的如图1~9中,方位标记物是在透明罩10内设有至少一条链1,链与透明罩10的连接位置位于透明罩10的中心与边缘之间。通过链的摆动角度,以及链在图像上的长度,通过三角函数公式,即可得出胶囊内窥镜的部分姿态参数。
30.优选的方案如图1~5中,所述的链1为4条,沿圆周均布;链1与透明罩10的连接位置位于透明罩10的中心与边缘之间;由链1的自由端与各个链1的根部构成的连接圆12之间的相对位置得出俯仰角,连接圆12是指经过链1的根部与透明罩10的圆心同心的圆。由链1与各个链1的根部之间连线构成的十字线13之间的夹角得出翻滚角,十字线13为经过链1的根部和透明罩10的圆心的径向线及与其垂直的径向线。或者根据链1的根部相对于透明罩10的圆心转角位置得出翻滚角。此处的连接圆12和十字线13是虚拟的,并不需要在透明罩10中刻画出来,仅需在运算时添加到图像中即可,即十字线交叉点为透明罩10圆心,且至少一根直线与透明罩10的竖直轴重合。图2中为胶囊内窥镜大致水平时,链1的状态,当俯仰角为0时,链1的长度最大,而当俯仰角向上或向下倾斜时,链1的长度会相应发生变化,通过三角函数公式即可得出俯仰角。由于透明罩10的内壁为弧形,因此透明罩10的内壁会对链1的长度产生干涉,例如位于两侧位置的链1的端头会落在透明罩10的内面上,从而使链1发生弯折或者长度发生变化,由此判断出胶囊内窥镜是在仰起还是俯下的状态。至于完全竖直的朝上和朝下的状态,同样由于透明罩10的干扰使链1的位置和长度存在较大不同,如图3中,当胶囊内窥镜竖直朝下时,链1落在透明罩10的内面上,使链1发生弯折,且长度在图像传感器3中看来较长,而如图4中,由于链1不会受到干扰,在图像传感器3中看来链的长度较短。从而能够轻易判断出
胶囊内窥镜的状态。如图5中,翻滚角的识别则较为容易。
31.优选的方案中,在链1上设有不同颜色或不同位置的色环,用于区分每个链1。由此结构,辅助识别胶囊内窥镜的翻滚位置。
32.优选的方案中,所述的光学镜头2为变焦光学镜头。设置的变焦光学镜头有助于将焦距汇聚在链1上,以获得链1的精确状态图像,而当焦距汇聚在人体内腔的位置,则链1的图像几乎被忽略,不会影响到图像的品质。
33.优选的方案如图6~8中,在链1的自由端设有磁性球9,磁性球9用于在外加的水平磁场中得出偏转角;优选的,链1的材质为不受磁场影响的材质,例如不含铁的铝制或钛合金制成的链。
34.所述的水平磁场是指位于体外的,与磁性球9之间大致为水平方向的磁铁14产生的磁场;即由此方案,以磁铁14替代了地磁,采用与俯仰角大致相同的计算方法,即可得出胶囊内窥镜的偏转角。
35.磁铁14为永磁铁或电磁铁。
36.实施例3:在实施例2的基础上,一种采用上述的便于通过图像确定拍摄时姿态的胶囊内镜的姿态确定方法,包括以下步骤:s1、如图2~4中,拍摄第一图像,识别第一图像中的链1的位置,由链1的长度,和链1与各个链1的根部构成的连接圆12之间的相对位置得出俯仰角;优选的方案中,若位于顶部位置的链1的自由端至少有1个位于连接圆12之内,其余位于连接圆12之外,则胶囊内窥镜的俯仰角在大于
‑
90
°
和小于90
°
之间,根据链1的长度计算得到俯仰角的角度值;当链1的自由端均位于连接圆12之内,若链1的成像长度大于一定值,则判断胶囊内窥镜的方向朝下,若链1的成像长度小于一定值,则判断胶囊内窥镜的方向朝上,所述的定值为胶囊内窥镜朝上时,链1的最大长度。
37.图2中为胶囊内窥镜大致水平时,链1的状态,当俯仰角为0时,链1的长度最大,而当俯仰角向上或向下倾斜时,链1的长度会相应发生变化,通过三角函数公式即可得出俯仰角。由于透明罩10的内壁为弧形,因此透明罩10的内壁会对链1的长度产生干涉,例如位于两侧位置的链1的端头会落在透明罩10的内面上,从而使链1发生弯折或者长度发生变化,由此判断出胶囊内窥镜是在仰起还是俯下的状态。至于完全竖直的朝上和朝下的状态,同样由于透明罩10的干扰使链1的位置和长度存在较大不同,如图3中,当胶囊内窥镜竖直朝下时,链1落在透明罩10的内面上,使链1发生弯折,且长度在图像传感器3中看来较长,而如图4中,由于链1不会受到干扰,在图像传感器3中看来链的长度较短。从而能够轻易判断出胶囊内窥镜的姿态。
38.如图5中,由链1与各个链1的根部之间连线构成的十字线13之间的夹角得出翻滚角;如图5中,计算链1与十字线13之间的夹角,即可得出翻滚角,每个链1在不同的位置设有色环,即可得出图像的真正的顶部位置。
39.s2、如图6~8中,启用磁铁14,形成相对于胶囊内窥镜的水平磁场,磁性球9受水平磁场影响带动链1指向磁铁14方向,拍摄第二图像,识别第二图像中的链1的位置,由链1的长度,和链1与各个链1的根部构成的连接圆12之间的相对位置得出偏转角;
优选的方案如图7中,若位于远离磁铁14的位置的链1的自由端至少有1个位于连接圆12之内,其余位于连接圆12之外,则胶囊内窥镜的偏转角在大于
‑
90
°
和小于90
°
之间,根据顶部或底部位置的链1的长度计算得到偏转角的角度值;当链1的自由端均位于连接圆12之内,若链1的成像长度大于一定值,则判断胶囊内窥镜的光学镜头2的轴线方向垂直指向磁铁14,若链1的成像长度小于一定值,则判断胶囊内窥镜的光学镜头2的轴线方向远离磁铁14,并与磁铁14垂直;所述的定值为胶囊内窥镜无磁场朝上时,链1的最大长度。
40.在拍摄第一图像和第二图像时,光学镜头2的焦距为一预设值,且聚焦在链1上;通过以上步骤确定胶囊内窥镜在人体内的姿态。
41.实施例4:在实施例2、3的基础上,优选的方案如图9中,所述的链1为偶数条,分组后,每组两条;例如优选的为8条,以透明罩10的中心为圆心沿圆周均布。
42.链1与透明罩10的连接位置位于透明罩10的中心与边缘之间;由链1的自由端与各个链1的根部构成的连接圆12之间的相对位置得出俯仰角,由链1与各个链1的根部之间连线构成的十字线13之间的夹角得出翻滚角;在每组链1中,有一条链1的自由端设有磁性球9,另一条链1不设磁性球9,磁性球9用于在外加的水平磁场中得出偏转角;本例中的磁性球9是指受磁场影响的球,例如磁性球。
43.所述的水平磁场是指位于体外的,与磁性球9之间大致为水平方向的磁铁14产生的磁场。
44.磁铁14为永磁铁或电磁铁。由此结构,在任何的图片中,均可以观测到链1的状态,并由链1的状态计算得出胶囊内窥镜的姿态。
45.优选的方案中,还设有外部的姿态传感器,姿态传感器附着在人体上,用于检测人体的姿态。姿态传感器包括陀螺仪或三轴加速度传感器。由姿态传感器的设置,在人运动或更换姿态后,胶囊内窥镜与磁铁14的相对关系发生变化,通过体外的姿态传感器仍能能够联合解算出胶囊内窥镜的姿态。
46.实施例5:在实施例3或4的基础上,一种采用上述的便于通过图像确定拍摄时姿态的胶囊内镜的姿态确定方法,包括以下步骤:s1、如图9中,启用磁铁14,拍摄图像,识别图像中链1的位置,根据磁铁14的方向结合人体姿态,分辨每组链1中设有磁性球9的链1和不设磁性球的链1;s2、根据不设磁性球链1的长度,和链1与各个链1的根部构成的连接圆12之间的相对位置得出俯仰角;若位于顶部位置的链1的自由端至少有1个位于连接圆12之内,其余位于连接圆12之外,则胶囊内窥镜的俯仰角在大于
‑
90
°
和小于90
°
之间,根据链1的长度计算得到俯仰角的角度值;当链1的自由端均位于连接圆12之内,若链1的成像长度大于一定值,则判断胶囊内窥镜的方向朝下,若链1的成像长度小于一定值,则判断胶囊内窥镜的方向朝上,所述的定值为胶囊内窥镜朝上时,链1的最大长度;
s3、根据设磁性球链1的长度,和链1与各个链1的根部构成的连接圆12之间的相对位置得出相对于磁铁的偏转角;若位于远离磁铁14的位置的链1的自由端至少有1个位于连接圆12之内,其余位于连接圆12之外,则胶囊内窥镜的偏转角在大于
‑
90
°
和小于90
°
之间,根据顶部或底部位置的链1的长度计算得到偏转角的角度值;当链1的自由端均位于连接圆12之内,若链1的成像长度大于一定值,则判断胶囊内窥镜的光学镜头2的轴线方向垂直指向磁铁14,若链1的成像长度小于一定值,则判断胶囊内窥镜的光学镜头2的轴线方向远离磁铁14,并与磁铁14垂直;通过以上步骤确定胶囊内窥镜在人体内的姿态。
47.实施例5:在实施例1的基础上,优选的方案如图10中,所述的方位标记物包括透明的球壳15,球壳15内设有重力球或磁性球,球壳为2~4个,各个球壳以透明罩的中心为原点,沿圆周相距90
°
布置;优选采用两个球壳,其中一个球壳15内设有重力球,重力球为不受磁力影响的材质,例如不含铁元素的铝制或钛合金材质,另一个球壳15内设有磁性球。
48.由重力球16或磁性球9在球壳15内的位置得出俯仰角和翻滚角;该位置还参考了标出或未标出的连接圆12和十字线13。由于两个球壳15之间相距90
°
,因此即便不标出,人工智能也能够容易的标识出连接圆12和十字线13的位置。例如,当胶囊内窥镜仰起时,重力球16就逐步偏离球壳15边缘的位置,从而根据偏离的距离解算出仰角。而当胶囊内窥镜俯下时,重力球16在逐步偏离球壳15边缘的同时,还会因为透视的原因,在视觉上缩小,从而判断出是扬起还是俯下状态,而俯角的解算方法与仰角的解算方法相同。
49.翻滚角是由重力球16中心距球壳15的中心与十字线13之间的夹角解算得出。
50.磁性球9用于在外加的水平磁场中得出偏转角;随着胶囊内窥镜的偏转,磁性球9逐步偏离球壳15边缘的位置,根据偏离的距离解算出具体的偏转角度,判断近磁场还是远磁场偏转角,是从磁性球9在逐步偏离球壳15边缘的同时,因为透视的原因,在视觉上缩小还是不变来进行判断,从而得出相对磁场的偏转方向。
51.所述的水平磁场是指位于体外的,磁力线方向大致为水平方向的磁铁;磁铁为永磁铁或电磁铁。
52.优选的方案中,还设有外部的姿态传感器,姿态传感器附着在人体上,用于检测人体的姿态。姿态传感器包括陀螺仪或三轴加速度传感器。由姿态传感器的设置,在人运动或更换姿态后,胶囊内窥镜与磁铁14的相对关系发生变化,通过体外的姿态传感器仍能能够联合解算出胶囊内窥镜的姿态。
53.实施例6:在实施例1的基础上,优选的方案如图11中,所述的方位标记物包括透明的球壳15,球壳15内设有磁性球9,球壳15内还设有透明液体,透明液体与球壳15之间形成气泡17;由气泡17在球壳15内的位置得出俯仰角和翻滚角;磁性球9用于在外加的水平磁场中得出偏转角;所述的水平磁场是指位于体外的,与磁性球9之间大致为水平方向的磁铁14产生的磁场;磁铁14为永磁铁或电磁铁。本例的优势在于设置一个球壳15即可得出胶囊内窥镜
的姿态。
54.实施例7:在实施例5和6的基础上,一种采用上述的便于通过图像确定拍摄时姿态的胶囊内镜的姿态确定方法,包括以下步骤:s1、启用磁铁14,拍摄图像,识别图像中重力球16或气泡17的位置,根据重力球16或气泡17在球壳15内的位置得出俯仰角,根据近大远小的原理得出俯仰角的正负值;所述的俯仰角的正负值以对中水平位置划分。
55.s2、根据球壳15在图像中相对于透明罩10的圆心转角位置得出翻滚角;s3、根据磁性球9在球壳15内的位置得出相对于磁铁的偏转角,根据近大远小的原理得出偏转角的正负值;所述的偏转角的正负值以对中的竖直位置划分。
56.通过以上步骤确定胶囊内窥镜在人体内的姿态。
57.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本技术中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。