一种跨尺度3d打印装置及其打印方法
技术领域
1.本发明涉及增材制造技术领域,尤其涉及一种跨尺度3d打印装置及其打印方法。
背景技术:
2.近年来,随着现代工业的高速发展,传统的加工方式已经远远不能满足现代高新技术制造产品的要求,智能与自动化是制造业未来发展的必然趋势。与此同时,市场需求的多样性也促使传统制造业向绿色制造、智能制造等方向转变,生产模式也由“大批量单一模式”逐步演变为“小批量个性化定制”。顺应这一需求,智能制造的典型代表,智能制造的典型代表,3d打印技术发展非常迅速,并得到了广泛的关注和研究。
3.3d打印技术几乎能够实现任意几何形状物体的制造,目前已经被应用于航空航天、组织工程、生物医疗、汽车、家电、柔性电子、文化创意、新材料、新能源、机器人、建筑等诸多领域,显示了其广阔的应用前景。现阶段,3d打印技术正从传统的控形向控性发展,从单材料到多材料,从宏尺度向微尺度和宏/微/纳跨尺度方向发展,目标是实现功能驱动的“材料
‑
结构
‑
器件”的一体化制造,产品的多功能化和轻量化,通过多材料跨尺度增材制造最终实现“创材”、“创物”和“创生”。
4.相比其他3d打印技术,熔融沉积制造工艺由于其具有设备费用较低、工艺简单、材料利用率高等优势在实际生产中得到广泛应用。熔融沉积制造工艺3d打印机利用热塑性材料在熔融状态下的流动性和粘结性,将丝材加热至略高于熔化温度,在计算机的控制下,喷头基于水平分层数据执行x
‑
y平面运动,通过送丝装置将丝材送至喷嘴,加热、熔化、挤出并粘接到工作台表面,然后快速冷却和固化。在打印完每层后,将喷头高度提高一层(或者将工作台的高度降低一层),继续打印下一层。如此重复,喷头运动完成逐层的打印最终实现整个三维模型的成型制造。
5.然而,跨尺度结构件3d打印一体成型是集材料、工艺、设备等多因素的增材制造过程,如何在大范围下进行小尺度结构的高精度、快速3d打印一直是业内研究重点。目前,针对跨尺度结构3d打印通常在生物、电子领域有所涉及。生物方面主要通过使用专用算法来进行血管类小尺度结构的打印;电子领域则主要是在微纳层面进行电路打印。
技术实现要素:
6.考虑到3d打印技术在小尺度大范围环境下对打印品快速成型的迫切需求,在综合考虑了工业机器人的打印精度与打印范围后,发明提出了一种基于串联工业机器人和小尺度打印机构的跨尺度3d打印装置及其打印方法,改善了工业机器人在小尺度大范围环境下打印精度的不足,突破了小尺度重复结构的大范围打印的局限性,增加了打印速度,解决了在小尺度大范围条件下一体成型的零件成型需求。
7.本发明的技术方案如下:
8.一种跨尺度3d打印装置,包括:工业机器人运动系统、小尺度运动系统和小尺度打印系统;其中,
9.工业机器人运动系统作为整个3d打印装置的基座或安装在导轨、转台上,能够实现打印路径上的大范围移动,包括工业机器人本体和中控单元;
10.小尺度运动系统安装在工业机器人末端,并且能够在小范围内进行高精度的快速复杂运动,其包括小尺度运动机构、动平台、控制单元和驱动单元;
11.小尺度打印系统安装在小尺度运动系统的动平台上,用于实施小范围内的高精度3d打印工作。
12.优选的,所述驱动单元由控制单元操控,驱动小尺度运动机构在小范围内运动。
13.优选的,所述小尺度运动机构为单轴或多轴的串/并联机构,其运动精度达
±
0.75μm~
±
0.1mm。
14.优选的,所述小尺度运动机构为六轴并联平台,所述驱动单元包括电机和其他驱动,所述控制单元为运动控制器、plc或单片机。
15.优选的,所述工业机器人为多轴串联或并联机器人,所述中控单元为独立控制系统或工业自动化网络。
16.优选的,所述工业机器人为六轴串联工业机器人。
17.优选的,所述打印系统包括打印头、挤出单元、加热单元、散热单元和打印控制系统。
18.本发明还提出了一种基于跨尺度3d打印装置的打印方法,包括以下步骤:
19.s1依据小尺度运动系统的运动范围,将整个打印空间划分为若干个区块;
20.s2根据建立的待打印件三维模型,工业机器人移动到指定区块的中心;
21.s3工业机器人末端的小尺度运动系统驱动其动平台上的小尺度打印系统,在该区块内进行小尺度的高精度快速打印;
22.s4该区域打印完成后,工业机器人移动到下一区块的中心;
23.s5重复步骤s3
‑
s4,直至打印件成型。
24.本发明还提出了另一种基于跨尺度3d打印装置的打印方法,包括以下步骤:
25.s1根据建立的待打印件三维模型,设定工业机器人的打印路径;
26.s2工业机器人按照打印路径连续运动,安装在工业机器人末端的小尺度运动系统驱动其动平台上的小尺度打印系统同时进行打印工作;
27.s3工业机器人、小尺度运动系统和小尺度打印系统同时连续工作,直至打印件成型。
28.相比于现有技术,本发明具有以下优势:
29.1.相对于传统的3d打印技术,本发明的跨尺度3d打印装置使用工业机器人进行3d打印可以有效提高打印范围,有效解决跨尺度打印中的范围需求;并且由于工业机器人拥有更多自由度,使用工业机器人进行3d打印可以更好的进行曲面零件的3d打印,突破了平面打印的局限性。
30.2.本发明采用工业机器人和小尺度运动机构并行的3d打印方式,克服了工业机器人末端运动速度受到精度要求制约的问题,既能够满足3d打印对于范围的需求,又能在小尺度范围内完成高精度的打印工作,提高打印速度。
附图说明
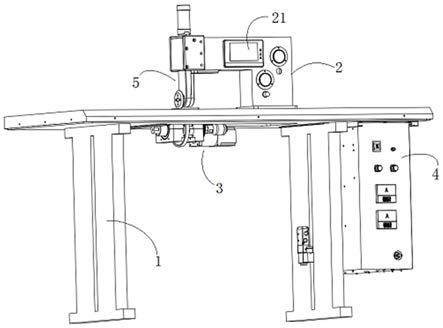
31.图1为本发明的跨尺度3d打印装置结构示意图;
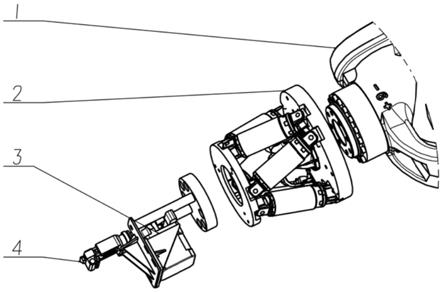
32.图2为采用本发明的3d打印方法获得的打印件;
33.附图标记:
[0034]1‑
工业机器人,2
‑
六轴并联平台,3
‑
连接架,4
‑
挤出头。
具体实施方式
[0035]
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
[0036]
本发明提出的跨尺度3d打印装置主要包括四部分:工业机器人运动系统、小尺度运动系统和小尺度打印系统。在一个实施例中,如图1所示,包括工业机器人1,六轴并联平台2,步进电机及连接架3,加热块及挤出头4。
[0037]
工业机器人运动系统:由工业机器人及其中控单元组成的工业机器人运动系统在3d打印的过程中负责主要的运动过程,将打印系统和视觉系统送到指定的打印节点。在一些实施例中,工业机器人可以为多轴串联机器人,以六轴串联工业机器人为最优,因为曲面零件的打印要求主要运动机构至少要拥有六自由度,并且六轴串联工业机器人的工作空间也相对较大,但是其绝对定位精度不足,通常在1
‑
3mm。在一些实施例中,中控单元可以是机器人自身的控制柜,也可以是更高级别的工业自动化网络,工业自动化网络中存在多台3d打印设备,由上位机或数控系统来对所有设备进行控制。
[0038]
小尺度运动系统:小尺度运动机构、动平台、控制单元和驱动单元,在3d打印的过程中负责针对小尺度结构进行打印。在一些实施例中,小尺度运动机构可以是单轴或多轴串联或并联机构,采用单轴运动滑台时,精度最高可达到10μm,理论上可将某个自由度上的精度提高到10μm级别,六轴并联平台则为最优选择,因为六轴并联平台具有高精度、多自由度的优势,其重复定位精度最高可以达到
±
0.75μm,与此同时具有6自由度也可以满足打印曲面零件的需要。驱动单元和控制单元依据小尺度运动机构类型而改变,但原理始终是对各自由度的运动机构进行驱动,驱动单元包括但不限于步进电机、伺服电机;以单轴运动滑台为例,其控制单元包括但不限于运动控制卡、plc;以六轴并联平台为例,其控制单元包括但不限于可编程运动控制器、plc、单片机。
[0039]
小尺度打印系统:小尺度打印系统在3d打印过程中负责将耗材进行处理后打印在基板上,逐层形成结构件。打印系统因其耗材不同可以打印工程塑料、树脂基电极、碳纤维增强复合材料等,针对不同的打印任务打印系统的结构可以进行调整。在一个实施例中,打印系统包括打印头、挤出单元、加热单元和散热单元。打印系统的控制单元也因其具体构成各不相同。例如在碳纤维预浸料铺丝过程中,控制单元需要控制打印头上的重送装置对耗材进行输送,需要控制气动元件对耗材进行剪断,需要控制温控元件对耗材进行预热等等。
[0040]
基于本发明提出的跨尺度3d打印装置,设计了一种跨尺度3d打印方法,具体包括以下步骤:
[0041]
s1依据小尺度运动系统的运动范围,将整个打印空间划分为若干个区块;
[0042]
s2根据建立的待打印件三维模型,工业机器人移动到指定区块的中心;
[0043]
s3工业机器人末端的小尺度运动系统驱动其动平台上的小尺度打印系统,在该区
块内进行小尺度的高精度快速打印;
[0044]
s4该区域打印完成后,工业机器人移动到下一区块的中心;
[0045]
s5重复步骤s3
‑
s4,直至打印件成型。
[0046]
基于本发明提出的跨尺度3d打印装置,还设计了另一种跨尺度3d打印方法,具体包括以下步骤:
[0047]
s1根据建立的待打印件三维模型,设定工业机器人移动的蛇形扫描式打印路径;
[0048]
s2工业机器人按照打印路径连续运动,安装在工业机器人末端的小尺度运动系统驱动其动平台上的小尺度打印系统同时进行打印工作;
[0049]
s3工业机器人、小尺度运动系统和小尺度打印系统同时连续工作,直至打印件成型。
[0050]
图2展示了本发明采用在大范围内打印小尺度重复结构的方法,相对于整体大的打印范围而言,其中每一个小“晶胞”均是小尺度的。
[0051]
以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明。应当指出,对于本技术领域的普通技术人员来说,在不脱离发明原理的前提下,还可以对发明进行若干改进和修饰,这些改进和修饰也落入发明权利要求的保护范围内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。