1.本实用新型涉及一种无人操作数控雕刻系统。
背景技术:
2.在现有的雕刻加工系统中,主要是以单一雕刻加工单工序零件为主,对需要多工序零部件无法进行加工,并且对于加工要求比较严格的零部件来说加工精度偏低工序繁多并且易出现错误。目前缺少实现在无人化状态下自动实现产品上下料加工控制,并实现多种类零件的有序生产的雕刻系统,另外无法下发多种零件生产计划,无法实时检测料仓内产品加工状态。
技术实现要素:
3.为了解决上述问题,本实用新型的目的是提供一种无人操作数控雕刻系统。
4.为实现上述目的,本实用新型的技术方案为:一种无人操作数控雕刻系统,包括雕刻平台总成和位于雕刻平台总成两端的送料机器人、取料机器人,雕刻平台总成表面设置有平行的两条输送带,雕刻平台总成两侧分别设置有多对雕刻机,每台雕刻机处对应有一个用于检测物料的传感器装置,雕刻平台总成的送料机器人一端设置有毛坯料仓,雕刻平台总成的取料机器人一端设置有成品料仓,雕刻平台总成、雕刻机、送料机器人以及取料机器人通过电缆线与电脑控制单元电连接,电脑控制单元将数据实时显示在一侧的显示终端。
5.进一步地,毛坯料仓、雕刻平台总成、雕刻机、成品料仓、取料机器人和送料机器人通过闭合的安全围栏进行围绕。
6.进一步地,每条输送带表面分别间隔设置有物料定位块,每条输送带上相邻的物料定位块间隔等于同一侧雕刻机之间的距离。
7.进一步地,物料定位块由磁铁制成。
8.本实用新型电脑控制单元具有工位计算机与电气控制系统,用来控制整个单元的加工、测量、零件更换等指令的发出与控制,从而实现智能单元内部零部件的固定更换与加工测量数据的可视化,使各工位之间实现无人操作加工与多变的工件加工,降低生产劳动力,提高工作效率。
附图说明
9.现结合附图对本实用新型做进一步说明。
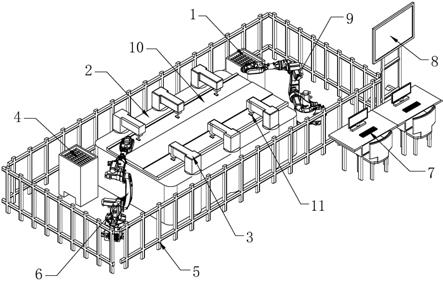
10.图1为本实用新型的立体结构示意图;
11.图2为本实用新型的俯视结构示意图。
具体实施方式
12.如图1
‑
2所示,一一种无人操作数控雕刻系统,包括雕刻平台总成2和位于雕刻平
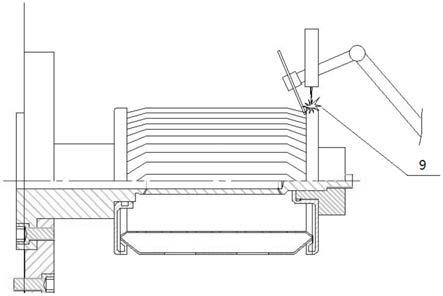
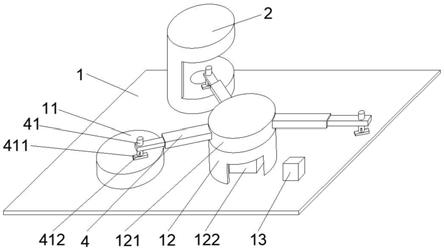
台总成2两端的送料机器人9、取料机器人6,雕刻平台总成2表面设置有平行的两条输送带10,雕刻平台总成2两侧分别设置有多对雕刻机3,每台雕刻机3处对应有一个用于检测物料的传感器装置,雕刻平台总成2的送料机器人9一端设置有毛坯料仓1,雕刻平台总成2的取料机器人6一端设置有成品料仓4,雕刻平台总成2、雕刻机3、送料机器人9以及取料机器人6通过电缆线与电脑控制单元7电连接,电脑控制单元7将数据实时显示在一侧的显示终端8。
13.为了起到良好地防护效果,毛坯料仓1、雕刻平台总成2、雕刻机3、成品料仓4、取料机器人6和送料机器人9通过闭合的安全围栏5进行围绕,安全围栏5可以有效的将内部工作区域进行隔断,预防加工时出现误操作造成人员伤亡。
14.为了使工件固定牢固,同时又便于取下,每条输送带10表面分别间隔设置有物料定位块11,每条输送带10上相邻的物料定位块11间隔等于同一侧雕刻机3之间的距离,物料定位块11由磁铁制成,目前使用的雕刻材料,特别是机械部件,采用的铁质材料较多,通过物料定位块11吸附及卡主作用,可以使工件雕刻时牢固,同时取下时只需要克服磁铁的吸力即可,方便取下。
15.本实用新型工作原理:通过工位计算机与电气控制系统7内部安装的智能软件发出相应的操作指令,由我公司设计,送料机器人9将待加工坯料从毛坯料仓1内将取出,并放置到雕刻平台总成2上,送料机器人9每次取料2件分别放到雕刻平台总成2的前端雕刻机3处,随后输送带10将物料传递到下一工位处,机器人继续进行抓料放置,直到平台内雕刻机3工作区域内全部放置待加工坯料后,雕刻机3进行工作,(也可以再每次进行抓料放置后,第一位雕刻机3加工第一道工序,加工完成后传递到第二工位进行加工,直到最后一工位进行加工完成),工件完成加工后取料机器人6将加工完成的工件取下并放置到成品料仓4。通过电脑系统控制可以实现多种模式切换,并可以在显示终端进行显示。
16.以上所述仅为本实用新型示意性的具体实施方式,并非用以限定本实用新型的范围。任何本领域的技术人员,在不脱离本实用新型的构思和原则的前提下所作出的等同变化与修改,均应属于本实用新型保护的范围。
技术特征:
1.一种无人操作数控雕刻系统,其特征在于:包括雕刻平台总成(2)和位于雕刻平台总成(2)两端的送料机器人(9)、取料机器人(6),雕刻平台总成(2)表面设置有平行的两条输送带(10),雕刻平台总成(2)两侧分别设置有多对雕刻机(3),每台雕刻机(3)处对应有一个用于检测物料的传感器装置,雕刻平台总成(2)的送料机器人(9)一端设置有毛坯料仓(1),雕刻平台总成(2)的取料机器人(6)一端设置有成品料仓(4),雕刻平台总成(2)、雕刻机(3)、送料机器人(9)以及取料机器人(6)通过电缆线与电脑控制单元(7)电连接,电脑控制单元(7)将数据实时显示在一侧的显示终端(8)。2.如权利要求1所述的一种无人操作数控雕刻系统,其特征在于:毛坯料仓(1)、雕刻平台总成(2)、雕刻机(3)、成品料仓(4)、取料机器人(6)和送料机器人(9)通过闭合的安全围栏(5)进行围绕。3.如权利要求1所述的一种无人操作数控雕刻系统,其特征在于:每条输送带(10)表面分别间隔设置有物料定位块(11),每条输送带(10)上相邻的物料定位块(11)间隔等于同一侧雕刻机(3)之间的距离。4.如权利要求1所述的一种无人操作数控雕刻系统,其特征在于:物料定位块(11)由磁铁制成。
技术总结
本实用新型公开了一种无人操作数控雕刻系统,包括雕刻平台总成和位于雕刻平台总成两端的送料机器人、取料机器人,雕刻平台总成表面设置有平行的两条输送带,每台雕刻机处对应有一个用于检测物料的传感器装置,雕刻平台总成的送料机器人一端设置有毛坯料仓,雕刻平台总成的取料机器人一端设置有成品料仓,雕刻平台总成、雕刻机、送料机器人以及取料机器人通过电缆线与电脑控制单元电连接,电脑控制单元将数据实时显示在一侧的显示终端。本实用新型实现智能单元内部零部件的固定更换与加工测量数据的可视化,使各工位之间实现无人操作加工与多变的工件加工,降低生产劳动力,提高工作效率。作效率。作效率。
技术研发人员:于恒 林志辉 王振国
受保护的技术使用者:山东辰榜数控装备有限公司
技术研发日:2021.03.26
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。