1.本实用新型涉及豆腐制作技术领域,具体的,涉及一种豆腐压箱循环输送装置。
背景技术:
2.在豆腐制作过程中,将卤水注入豆浆中,会产生絮状沉淀,需要将卤化后的絮状豆腐收集装箱,装箱后将箱子顶部用一个重物压住,要压很长时间才能将豆腐压制成形,只这一步骤就要花费很长时间。豆腐制作自动化,人为搬运费时费力,容易损坏正在形成的豆腐。
3.目前的自动化生产豆腐的设备也只是一些规模很小的设备,不能满足大规模生产的需要,且自动化程度有限、生产效率低。
技术实现要素:
4.本实用新型提出一种豆腐压箱循环输送装置,解决了相关技术中的人工搬动效率低、易损坏的问题。
5.本实用新型的技术方案如下:
6.一种豆腐压箱循环输送装置,包括,
7.机架,所述机架上设置有若干个托箱;
8.步进装置,所述步进装置设置在所述机架上,推动所述托箱沿第一方向前进;
9.回送轨道,所述回送轨道设置在机架上,位于所述步进装置一侧,所述回送轨道上设置有若干个所述托箱,所述回送轨道为若干个所述托箱提供导向;
10.所述步进装置包括,
11.滑架,所述滑架滑动设置在所述机架上,所述滑架滑动后带动若干个所述托箱沿第一方向移动;
12.推动组件,所述推动组件设置在所述滑架的两侧,所述推动组件均位于两个所述托箱之间。
13.作为进一步的技术方案,所述推动组件包括,
14.转动轴,所述转动轴位于所述滑架的一侧;
15.转动件,所述转动件转动设置在所述转动轴上,所述转动件一端具有推部,另一端具有卡部,所述推部一侧具有推面,所述推部高于所述托箱底部;
16.第一限位件,所述第一限位件位于所述卡部靠近所述推面一侧,并且与所述卡部接触。
17.作为进一步的技术方案,所述推动组件还包括,
18.扭簧,所述扭簧设置在所述转动轴上,为所述转动件提供一个逆时针转动的力。
19.作为进一步的技术方案,还包括,
20.驱动装置,所述驱动装置设置在所述机架上,所述驱动装置具有两个输出端,其中一个输出端作用于滑架,另一个输出端作用于所述回送轨道上的所述托箱。
21.作为进一步的技术方案,所述驱动装置包括,
22.第一气缸,所述第一气缸位于所述滑架一侧;所述第一气缸的输出端作用于所述滑架,所述第一气缸的行程为一个所述托箱的距离;
23.第二气缸,所述第二气缸位于所述回送轨道一侧,所述第二气缸的输出端作用于所述托箱,所述第二气缸的行程为一个所述托箱的距离;
24.所述第二气缸输出端的运动方向与所述第一气缸输出端的运动方向相反。
25.作为进一步的技术方案,
26.所述滑架位于所述机架之间,所述推动组件位于所述滑架与所述机架之间。
27.本实用新型的工作原理及有益效果为:
28.本实施例中,为了解决豆腐生产过程中人工搬动效率低、易损坏的问题,设置了步进装置和回送轨道,第一方向为加工方向,通过步进装置将装有待压制絮状豆腐的托箱沿第一方向向前逐步推动,再通过回送轨道将空的托箱沿第一方向的反方向送回,这样就可以实现托箱的自动化前进和退回,具体为,若干个托箱依次放置在机架上,步进装置设置在机架上,回送轨道也设置在机架上,位于步进装置下方,回送轨道上放置了若干个托箱,回送轨道为其上的托箱提供沿第一方向返回的导向。因为托箱中的豆腐在向前推送的过程中,会被一侧的挤压装置挤压,所以将托箱的前进过程设置为步进模式,每向前一步就停顿一次,让上方的挤压装置对托箱内的豆腐进行一次挤压,挤压之后再继续前进,为了实现步进,步进装置包括滑架和推动组件,滑架滑动设置在机架上,推动组件设置在滑架上,每两个托箱之间都设置有推动组件,推动组件跟随滑架沿第一方向移动,滑架每移动一次,就带动推动组件向前推动机架上的托箱一次,推动组件设置在滑架两侧,这样可以保证推动组件可以平稳的推动托箱。
附图说明
29.下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
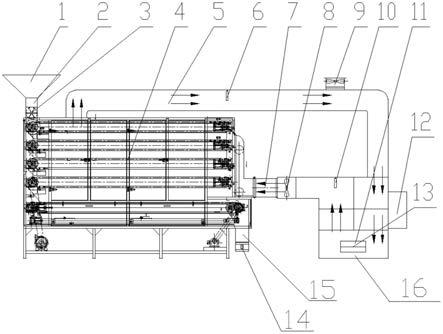
30.图1为本实用新型结构示意图;
31.图2为本实用新型中送料装置结构示意图;
32.图3为本实用新型中滑架结构示意图;
33.图4为本实用新型中推动组件状态一结构示意图;
34.图5为本实用新型中推动组件状态二结构示意图;
35.图6为本实用新型中推动组件状态三结构示意图;
36.图7为本实用新型中扭簧的结构示意图;
37.图中:1、送料装置,101、出口,2、托箱,3、输送装置,4、挤压装置,5、反应桶, 501、出料管道,6、机架,7、滑架,701、推动组件,702、转动轴,703、转动件,704、卡部,705、推面,706、第一限位件,707、扭簧,8、回送轨道,9、驱动装置,901、第一气缸,902、第二气缸。
具体实施方式
38.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的
所有其他实施例,都涉及本实用新型保护的范围。
39.如图1~图7所示,本实施例提出了一种豆腐压箱循环输送装置,包括,
40.机架6,机架6上设置有若干个托箱2;
41.步进装置,步进装置设置在机架6上,推动托箱2沿第一方向前进;
42.回送轨道8,回送轨道8设置在机架6上,位于步进装置一侧,回送轨道8上设置有若干个托箱2,回送轨道8为若干个托箱2提供导向;
43.其特征在于,步进装置包括,
44.滑架7,滑架7滑动设置在机架6上,滑架7滑动后带动若干个托箱2沿第一方向移动;
45.推动组件701,推动组件701设置在滑架7的两侧,推动组件701均位于两个托箱2之间。
46.本实施例中,为了解决豆腐生产过程中人工搬动效率低、易损坏的问题,设置了步进装置和回送轨道8,第一方向为加工方向,通过步进装置将装有待压制絮状豆腐的托箱2沿第一方向向前逐步推动,再通过回送轨道8将空的托箱2沿第一方向的反方向送回,这样就可以实现托箱2的自动化前进和退回,具体为,若干个托箱2依次放置在机架6上,步进装置设置在机架6上,回送轨道8也设置在机架6上,位于步进装置下方,回送轨道8上放置了若干个托箱2,回送轨道8为其上的托箱2提供沿第一方向返回的导向。因为托箱2中的豆腐在向前推送的过程中,会被一侧的挤压装置4挤压,所以将托箱2的前进过程设置为步进模式,每向前一步就停顿一次,让上方的挤压装置4对托箱2内的豆腐进行一次挤压,挤压之后再继续前进,为了实现步进,步进装置包括滑架7和推动组件701,滑架7滑动设置在机架6上,推动组件701设置在滑架7上,每两个托箱2之间都设置有推动组件701,推动组件701跟随滑架7沿第一方向移动,滑架7每移动一次,就带动推动组件701向前推动机架6上的托箱2一次,推动组件701设置在滑架7两侧,这样可以保证推动组件701可以平稳的推动托箱2。
47.进一步,推动组件701包括,
48.转动轴702,转动轴702位于滑架7的一侧;
49.转动件703,转动件703转动设置在转动轴702上,转动件703一端具有推部,另一端具有卡部704,推部一侧具有推面705,推部高于托箱2底部;
50.第一限位件706,第一限位件706位于卡部704靠近推面705一侧,并且与卡部704接触。
51.本实施例中,滑架7一直向前可以实现推动托箱2向前,但是滑架7一端会突出机架6,另一端也不能再放置新的托箱2上去,这样生产需要的空间比较大、生产效率比较低,所以将滑架7设置为在原位前进一次后,停顿一次,再向后一次回到原位,再前进一次,这样的往复运动;具体为,推动组件701包括转动轴702、转动件703、第一限位件706,转动轴702 位于滑架7一侧;转动件703转动设置在转动轴702上,转动件703的一端具有推部,另一端具有卡部704,推部沿第一方向一侧具有推面705;第一限位件706位于卡部704靠近推面 705的一侧,且在推面705推动托箱2时与卡部704接触。
52.滑架7前进时,推部高于托箱2底部,此时推面705与托箱2侧壁贴合,第一限位件706 卡住卡部704,使转动件703不能逆时针转动,从而使推面705推动托箱2;滑架7后退时,由于托箱2有一定重量,转动件703在跟随滑架7后退的过程中,推部被托箱2底部压着绕转
动轴702顺时针转动,推部就不会卡住托箱2,使滑架7能够顺利后退到原位,然后滑架7 再次向前,使推部再次推动托箱2。这样在生产过程中,滑架7只需要一段比较小的距离就可以实现将托箱2不断往前推,并且在托箱2不断向前的过程中,机架6一端不断有托箱2 被取下,空出的空位会不断被后面的托箱2填满,那么后面空出的位置就可以放置新的托箱 2,这样在机架6上可以同时加工特定数量的托箱2,加工效率比不往复的滑架7要提高很多。
53.进一步,推动组件701还包括,
54.扭簧707,扭簧707设置在转动轴702上,为转动件703提供一个逆时针转动的力。
55.本实施例中,滑架7后退到原位后,转动件703已经被托箱2压着转动了,要再次推动托箱2,需要转动件703逆时针转动至推部的推面705重新与托箱2的侧壁再次贴合,为了自动化实现这一过程,在转动轴702上设置了扭簧707,扭簧707为转动件703提供一个逆时针转动的力,使转动件703脱离托箱2底部后可以逆时针转动。
56.进一步,还包括,驱动装置9,驱动装置9设置在机架6上,驱动装置9具有两个输出端,其中一个输出端作用于滑架7,另一个输出端作用于回送轨道8上的托箱2。
57.本实施例中,滑架7前进和后退、回送轨道8上的托箱2沿第一方向的反方向前进,都需要驱动装置9进行驱动,为了便于实现两个方向的驱动,驱动装置9有两个输出端,其中一个输出端作用于滑架7,另一个输出端作用于回送轨道8上的托箱2。
58.进一步,驱动装置9包括,
59.第一气缸901,第一气缸901位于滑架7一侧;第一气缸901的输出端作用于滑架7,第一气缸901的行程为一个托箱2的距离;
60.第二气缸902,第二气缸902位于回送轨道8一侧,第二气缸902的输出端作用于托箱2,第二气缸902的行程为一个托箱2的距离;
61.第二气缸902输出端的运动方向与第一气缸901输出端的运动方向相反。
62.本实施例中,由于滑架7所推动的托箱2是装有豆腐的托箱2,整体重量比较重,而回送轨道8上的托箱2都是空的托箱2,整体重量比较轻,为了节省功耗,采用第一气缸901 和第二气缸902分别进行驱动,第一气缸901设置在滑架7一侧,驱动滑架7往复移动,第一气缸901可以根据需要设置若干个;第二气缸902设置在回送轨道8一侧,用于推动回送轨道8上的托箱2,为了能将空的托箱2运回,减少人的搬挪,第二气缸902输出端的运动方向与第一气缸901输出端的运动方向相反。
63.进一步,滑架7位于机架6之间,推动组件701位于滑架7与机架6之间。
64.本实施例中,托箱2放置在机架6上,滑架7设置在机架6之间,滑架7的上表面与托箱2的底面之间留有空隙,可以减小推动托箱2时产生的摩擦,更好推动托箱2,推动组件 701位于滑架7与机架6之间的缝隙,两排推动组件701之间的距离最大,推动托箱2时不容易产生偏差。
65.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。