1.本发明关于一种开盖部件、开盖装置与抽取系统。
背景技术:
2.在半导体与电子厂中,常需于各个制程中使用相应的化学药剂,例如半导体平坦化制程中的研磨液(slurry)。化学药剂通常储存于化液桶中,且化液桶的顶部常配有两个盖体,以密封化液桶的开口。当欲抽取或回填化学药剂时,需先将盖体移除以进行后续步骤。一般而言,化液桶的盖体为圆形的实心盖体,且具有侧边牙纹以及顶部的纹路(pattern)(例如,十字凹槽或多角形凹槽)。请参照图1,图1为现有技术的传统开盖方法的示意图,传统的开盖方式多为人工操作,即,作业人员a0使用开盖器具a1对盖体l1顶部的纹路施力,以开启或密封盖体l1。然而,传统的开盖方式使作业人员暴露于化学物质泄漏或爆炸的风险中。
3.为了改善安全生产工作的问题,多种自动化开盖设备已被提出,其中多数是以机械取代人力开启盖体。然而,因为化液桶盖体的顶部纹路有多种样式,所以在使用自动化开盖设备时,需预先替换符合盖体态样的开盖治具后,才可使用自动化开盖设备进行开盖步骤,此方法虽可提升操作人员的安全性,却无法改善作业效率的问题。另外,并非每一个自动化开盖设备都可以替换开盖治具,故不具有泛用性。
技术实现要素:
4.本发明的目的在于解决上述技术问题提供一种开盖部件、开盖装置与抽取系统,可降低工安风险与提升作业效率。
5.为了达成上述目的,本发明采用以下技术方案:
6.本发明实施例提供的一种开盖部件包括针柱架、多个无动力针柱以及传动件。所述无动力针柱可动地设置于针柱架,且系用以根据盖体表面的纹路(pattern)对应地移动以贴合盖体表面。所述传动件连接针柱架,于接收动力后带动针柱架旋转以开启盖体。
7.本发明实施例提供的一种开盖装置包括对位组件以及开盖组件。所述对位组件具有两个对位装置且彼此位于相对的两端,对位组件可以移动以及两个对位装置可彼此远离或靠近,以辨识桶身及其盖体的位置。所述开盖组件具有两个如前述的开盖部件且彼此位于相对的两端,并系与对位组件位于同一平面,其中两个开盖部件可彼此远离或靠近。对位组件与开盖组件的动力由动力源提供,在对位组件辨识盖体的位置后,开盖组件据此移动到盖体的上面,并于两个开盖部件的多个无动力针柱贴合盖体表面后旋转开启盖体。
8.可选地,开盖组件的两个开盖部件更包括裙件与抽气装置,其中裙件系包覆于无动力针柱的外围以形成内部空间,以及抽气装置系连接开盖部件。在无动力针柱贴合盖体表面并旋转开启盖体时,所述抽气装置对内部空间抽气以形成仿真空环境,以密合开盖部件与盖体。
9.可选地,开盖组件更包括第一移动件,其中第一移动件的两端分别连接有开盖部
件,使两个开盖部件可彼此远离或靠近。
10.可选地,对位组件的每一个对位装置为超音波测距仪、红外线测距仪或对位镜头。
11.本发明实施例提供的抽取系统包括如前述其中之一的开盖装置与抽取组件,其中抽取组件具有两个抽取部件且彼此位于相对的两端,且两个抽取部件可彼此远离或靠近。在开盖装置开启桶身的盖体后,抽取组件移动到桶身的开口处以抽取桶身装载的内容物。
12.可选地,抽取组件与开盖装置的开盖组件形成直角交错,且更包括第二移动件,其中第二移动件的两端分别连接抽取部件,使两个抽取部件可彼此远离或靠近。
13.可选地,抽取系统更包括桶身固定装置,设置于开盖装置与抽取组件的下方。
14.可选地,桶身固定装置更包括至少一个秤重装置,设置于桶身固定装置,用以监控桶身及其内容物的重量。
15.可选地,第一移动件为四轴螺杆的其中两轴螺杆,以及第二移动件为四轴螺杆的另外两轴螺杆。
16.简言之,本发明实施例提供的开盖部件、开盖装置与抽取系统可于对位组件辨识盖体位置后,由开盖部件的无动力针柱形成符合盖体纹路的态样以开启盖体,最后以抽取组件抽取容器的内容物,以实现对容器开盖与抽取内容物。本发明所述的开盖部件、开盖装置与抽取系统可兼顾人员安全与节省时间成本,故于对开盖及抽取(例如但不限制为抽液)有需求的各种市场(例如半导体、电子等制程)具有优势。
17.本发明的有益效果:本发明当欲使用抽取系统对容器(例如,化液桶)的内容物(例如但不限制为液体、气体、固液混合物或其他)进行抽取时,先通过开盖装置的对位组件辨识容器及盖体的位置后,再借由开盖部件的无动力针柱形成对应于盖体纹路的态样以实现开盖,最后,抽取系统利用抽取组件抽取容器的内容物,其中开盖部件、开盖装置与抽取系统的动力可由动力源提供。所述开盖部件、开盖装置与抽取系统可自动化地完成开盖与抽取流程,几乎不需人力介入,更不用替换符合盖体纹路的开盖治具,故可降低安全生产工作风险与提升作业效率。
附图说明
18.图1是现有技术的传统开盖方法的示意图。
19.图2是本发明实施例的抽取系统的构件关系示意图。
20.图3是本发明实施例的抽取系统的立体示意图。
21.图4是本发明实施例的抽取系统的仰视图。
22.图5是本发明实施例的对位装置辨识桶身与盖体的步骤流程示意图。
23.图6是本发明实施例的开盖部件的部分透视立体图。
24.图7是本发明实施例的开盖部件的仰视图。
25.图8是本发明实施例的开盖部件的立体示意图。
26.图9是本发明实施例的开盖部件的立体示意图。
27.图10是本发明实施例的桶身固定装置的立体示意图。
28.其中,附图标记:
29.1:抽取系统,2:开盖装置,3:开盖组件,301:开盖部件,302:螺杆,3011:传动件,3011a:主动齿轮,3011b:从动齿轮,3011c:齿轮带动区,3012:针柱架,3013:无动力针柱:
3014:裙件,3015:抽气装置,4:抽取组件,40:抽取部件:402:移动件6:对位组件,601:对位装置,602:移动件,7:桶身固定装置,701:上方固定架,7011:桶身固持区,7012:架体固定盘,702:侧边固定架,7021:挡板,703:底部乘載架,a0:作业人员,a1:开盖器具,l1:盖,p1、p2:路径,s1、s2:步骤,t:桶身。
具体实施方式
30.为充分了解本发明的目的、特征及功效,兹借由下述具体的实施例,并配合所附的图式,对本发明做一详细说明,说明如后。
31.本发明提供的一种开盖部件、开盖装置与抽取系统。所述抽取系统系先通过开盖装置开启容器(例如但不限制为化液桶的桶身)的盖体后,再通过抽取组件抽取容器装载的内容物(例如但不限制为液体、气体、固液混合物或其他)。当开盖装置欲开启盖体时,是先以具有两个对位装置的对位组件辨识桶身与盖体的位置,接着,具有两个开盖部件的开盖组件根据辨识的结果移动,使两个开盖部件相应的位于盖体之上(一般而言,当容器为化液桶时,具有两个盖体),进一步地,开盖部件的多个无动力针柱对应盖体表面的纹路形成相应的态样,并在接受动力后旋转以开启盖体,其中,开盖部件旋转的方向没有任何限制,其可以依照需求顺时针或逆时针旋转。
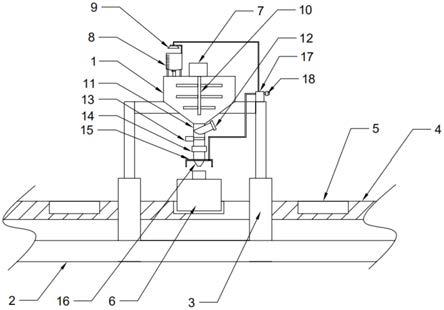
32.首先,请参照图2,图2是本发明实施例的抽取系统的构件关系示意图。如图2所示,抽取系统1包括开盖装置2与抽取组件4,其中抽取组件4包括抽取部件401,以及开盖装置2包括开盖组件3与对位组件6。所述对位组件6包括对位装置601,以及开盖组件包括开盖部件301,其中开盖部件301更包括传动件3011、针柱架3012与多个无动力针柱3013。
33.所述抽取系统与开盖装置的详细说明请参照图3与图4,图3是本发明实施例的抽取系统的立体示意图,以及图4是本发明实施例的抽取系统的仰视图。如图3与图4所示,抽取系统1包括抽取组件4以及开盖装置2,其中开盖装置2更包括对位组件6与开盖组件3。所述对位组件6具有两个对位装置601,且对位装置601彼此位于相对的两端,其中两对位装置601之间可通过移动件602连接,以使两个对位装置601可彼此远离或靠近,其中移动件602不限制为两个螺杆、两个线性致动器或由两个单轴致动器组合而成。所述开盖组件3具有两个开盖部件301,且开盖部件301彼此位于相对的两端,其中两开盖部件301之间可通过移动件302连接,以使两个开盖部件301可彼此远离或靠近,其中移动件302不限制为两个螺杆、两个线性致动器或由两个单轴致动器组合而成。在本发明实施例中,开盖组件3与对位组件6可位于同一平面,且开盖组件3与对位组件6可大约以45度交错排列,但本发明不以此为限制。所述开盖组件3与对位组件6在接收动力源(图未示)的动力后可进行三维度的移动。
34.所述对位装置601例如但不限制为超音波测距仪、红外线测距仪或是对位镜头,其中对位装置601辨识容器的桶身与盖体的方式请参照图5,图5是本发明实施例的对位装置辨识桶身与盖体的步骤流程示意图。首先,请参照图5的步骤s1,对位装置601与桶身t沿着路径p1相对移动(不限制为对位装置601移动或是桶身t移动)以辨识桶身t外缘的四点距离,以进一步推算出桶身t的中心,其中,此步骤实现的条件限制为,两个对位装置601之间的距离需小于桶身t直径的距离,且两个对位装置601的位置需在桶身t中心的两侧。接着,请参照步骤s2,对位装置601进行第二次辨识以寻找两个盖体之间的中点,以提供使后续开盖装置开盖定位。请参照图5步骤s2,所述对位装置601与桶身t沿着路径p2相对移动(不限
制为对位装置601移动或是桶身t移动)以辨识两个盖体l1的位置,以进一步推算出两个盖体l1之间的中点,其中对位组件6的两对位装置601更可以水平地靠近或远离,以正确找出两个盖体l1的位置。在对位装置601辨识容器的桶身与盖体的方式中,步骤s1并非必要步骤,对位装置601的精神在于辨识两个盖体l1的中心以于后续开盖时使开盖装置可据此定位。当对位装置为不需光源的对位装置时(例如,超音波测距仪),可于黑暗之中操作,使本发明更符合无人工厂的趋势。
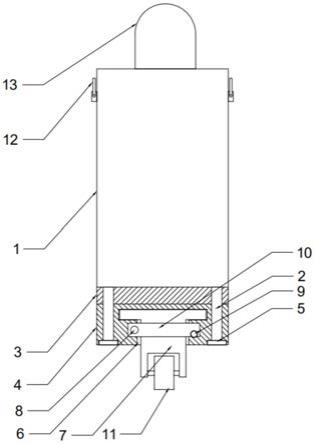
35.在对位组件作业完成后,开盖组件将根据两盖体的位置及其中点移动,以使两开盖组件的中心移动到两盖体的中心,使两开盖组件移动到桶身的盖体之上,并执行开盖步骤,其中开盖组件是接收动力源提供的动力移动。请参照图6至图9,图6是本发明实施例的开盖部件的部分透视立体图,图7是本发明实施例的开盖部件的仰视图,以及图8与图9是本发明实施例的开盖部件的立体示意图。如图6至图9所示,开盖组件的开盖部件301具有针柱架3012、多个无动力针柱3013与传动件,其中无动力针柱3013是可动地设置于针柱架3012,以及传动件可以如图6所示由主动齿轮3011a、从动齿轮3011b与齿轮带动区3011c组成。当开盖部件尚未接触盖体时,无动力针柱3013是如图9所示自然垂落。在动力源提供动力使开盖部件301朝着盖体方向移动时(例如但不限制为,当盖体位于开盖部件的下方时,动力源使开盖部件向下移动),无动力针柱3013可根据盖体表面的纹路对应地形成相应态样,即,无动力针柱3013可根据盖体表面的纹路对应地移动以贴合盖体表面(例如但不限制为图8的无动力针柱的排列,请注意,图8未绘出盖体)。接着,连接针柱架3012的传动件带动针柱架3012旋转,使无动力针柱3013带动盖体旋转并开启盖体。于本发明中,传动件带动的方式为,主动齿轮3011a带动从动齿轮3011b转动,以带动齿轮带动区3011c与针柱架3012转动,但本发明不以此为限制,任何可带动针柱架移动的构件皆应视为相同于本发明,例如,针柱架3012可连接转轴,或者,针柱架的造型被设计为可直接连接动力源,即传动件可以是转轴或与动力源连接的部件。
36.所述开盖部件301可更包括裙件与抽气装置以辅助开启及拿取盖体,请继续参照图6与图7,开盖部件301可具有包覆于无动力针柱3013外围的裙件3014以形成内部空间,以及具有连接开盖部件301的抽气装置3015。设置于裙件3014内部空间内的抽气装置3015可以在无动力针柱3013贴合盖体表面并旋转开启盖体时抽气,以使内部空间可形成仿真空状态,如此,可使盖体与无动力针柱3013之间及盖体与裙件3014之间更加密合,以利于开启及拿取盖体。所述裙件的材料与造型没有任何限制,其可以是切割成条状或是以整面的软质帘布是在开盖部件的外围,再者,所述抽气装置的类型及设置的位置亦没有任何限制,凡可达成对内部空间形成仿真空状态的抽气装置皆应视为本发明的概念。
37.在桶身的盖体被开启并移除后,抽取系统的抽取组件将可接收动力源的动力做动,以抽取桶身的内容物。请继续参照图3与图4。抽取组件4具有两个抽取部件401,且抽取部件401彼此位于相对的两端,其中两抽取部件401之间可通过移动件402连接,以使两个抽取部件401可彼此远离或靠近,其中移动件402不限制为两个螺杆、两个线性致动器或由两个单轴致动器组合而成。所述抽取组件4与开盖组件3可以但不限制形成直角交错,以及两抽取部件401与两开盖部件301也可以是共同连接于四轴螺杆的移动件(即,移动件为一个四轴螺杆,且四轴分别连接两抽取部件401与两开盖部件301,且两抽取部件401彼此相对配置以及两开盖部件301彼此相对配置),其中四轴螺杆的四轴可平行做动,以达成抽取部件
与开盖部件在同一个平面做水平位移,如此,可取代传统高成本的机械手臂的做动行为以节省成本,再者,四轴螺杆可更具有一轴心,使四轴螺杆媒合的抽取部件与开盖部件可达到三维度的移动,但本发明不以四轴螺杆为限制。在盖体被移除于桶身后,抽取组件4基于原本盖体的位置并于接收动力源提供的动力后移动,使抽取部件401移动到桶身的开口(原盖体的位置)上方,以抽取桶身装载的内容物。所述抽取部件的样式没有任何限制,例如其可以是安装有各式管径与接头的接口阀组。
38.所述抽取系统更可包括桶身固定装置以固持容器的桶身,使对位、开盖与抽取等步骤时可更精确。请参照图10,图10是本发明实施例的桶身固定装置的立体示意图。如图10所示,桶身固定装置7可包括上方固定架701、侧边固定架702以及底部乘载架703。所述上方固定架701可具有桶身固持区7011以及架体固定盘7012,其中桶身固持区7011系用以固定桶身的上方,以及架体固定盘7012可安置抽取组件与开盖装置。所述侧边固定架702可固定桶身的侧边,并可透过挡板7021以局限桶身的位置,其中侧边固定架702可被设计为符合桶身侧边的造型,例如符合圆桶的圆弧面,以强化其支撑性。所述底部乘载架703用以承载桶身。再者,桶身固定装置可更包括秤重装置以随时监控桶身及其内容物的重量,秤重装置的数量与安装位置没有任何限制,例如其可以安装于侧边固定架和/或底部乘载架。
39.接着,将完整描述抽取系统的抽取作业流程,首先,抽取系统可透过对位组件辨识桶身的盖体的位置。基于盖体的位置,开盖组件的两个开盖部件被移动到盖体上方,并透过无动力针柱密合盖体表面的图样,进一步带动盖体被开启,透过裙件与抽气装置可强化无动力针柱与盖体之间的密合,并协助盖体移除。进一步地,抽取组件基于原盖体的位置被移动到桶身的开口(即,原盖体的位置)上方,并抽取桶身装载的内容物,以实现抽取流程。所述开盖部件、开盖装置与抽取系统亦可以被应用在关盖流程,即,开盖部件的无动力针柱在密合盖体之后移动到开口上方,并进一步旋转以将盖体锁固至桶身。
40.综合以上所述,相较于现有技术,本发明实施例所述的开盖部件、开盖装置与抽取系统的技术效果,说明如下。
41.现有技术中,开盖流程常为人工操作,使操作人员暴露于化学品外泄的危险中,故自动化开盖设备被发展,然而,现有的自动化开盖设备仍需耗时替换适合于不同盖体的开盖治具,使开盖作业的效率受限。反观本发明所述的开盖部件、开盖装置与抽取系统,采用低成本的对位装置与开盖组件以开启盖体,其中开盖组件的无动力针柱可依照不同的盖体图样形成相应的态样,不需要耗时更换开盖治具。所述开盖装置结合抽取系统,使抽取流程可在完全自动化之下完成,其中开盖装置的对位组件更可使用不需光源的对位装置,使本发明提供的开盖装置与抽取系统可在黑暗中进行,以符合无人工厂的趋势。
42.当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。