1.本发明涉及新能源汽车技术领域,特别涉及一种汽车车身铆接质量自动在线 检测系统及检测方法。
背景技术:
2.根据调查显示,对于新能源汽车,车重每减少100kg,行驶路程可增加10%, 电池能量可节省15%到20%,刹车距离减少5%,轮胎寿命提高7%。汽车的轻 量化使得其不仅在安全性上有了大大提升,同时符合当今社会的节能环保、降低 污染的要求,所以汽车轻量化成为新能源汽车发展的重要方向。
3.汽车的轻量化的重要途径就是使用轻质材料。而轻质材料中铝合金由于其具 备密度低、强度高、导电性好等特性,成为新能源汽车轻量化发展选择的第一材 料。全铝车身技术也成为了汽车轻量化发展的重要技术。但是铝合金由于高热传 导性、表面易氧化等特点,传统的电阻点焊对于全铝或者钢铝混合车身的连接就 十分困难。
4.铆接工艺作为一种快速的机械紧固连接,可以用于连接两层或多层的同质或 异质板材。同时铆接工艺具有工序简单,铆接对象强度高,成本低,故障检测和 排查容易等优点,广泛应用于复合材料之间的连接。现有的对新能源全铝车身铆 接质量的检测采用人工检测方式,不仅效率低,受限于检测环境,同时由于人为 因素的干扰,导致检测误判率高。
技术实现要素:
5.本发明的目的是提供一种解决因人为因素等导致汽车铆接故障误判率高的 问题的汽车车身铆接质量自动在线检测系统及检测方法。
6.为此,本发明技术方案如下:
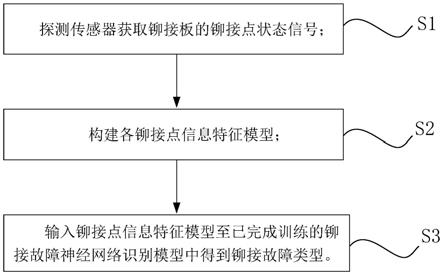
7.一种汽车车身铆接质量自动在线检测方法,步骤如下:
8.s1、探测传感器以其探头的探测平面始终保持平行于各探测点位对应铆接板 曲面中心点的切平面的方式,且以恒定的间隔距离沿包含有铆接板上全部铆接点 的探测路径持续向铆接板发射电压信号或电流信号,以得到各探测点位的反馈电 压信号或反馈电流信号,即铆接板的铆接点状态信号;
9.该步骤基于当铆接点铆钉状态不同(铆钉完整、铆钉有缺口或铆钉部分缺 失),向铆钉发射电压信号或电流信号反馈得到的反馈电压信号或反馈电流信号 也各不相同,因此,反馈电压信号或反馈电流信号能够有效反映当前铆钉的内部 铆接状态;
10.s2、对步骤s1采集的铆接点状态信号进行处理,得到铆接点信息特征模型; 其具体实施步骤为:
11.1)采用基于emd算法的希尔伯特
‑
黄变换的方法对对经过步骤s201的滤波 处理后的铆接点状态信号进行emd分解,得到不同尺度的固有模态函数imf分 量,进而对各尺度下的固有模态函数imf分量进行希尔伯特
‑
黄变换得到各采样 点位对应包含有y条电压曲线的频谱图;
12.2)在步骤s202得到的频谱图中提取各个铆钉铆接点处的有效频谱图作为单 个铆钉的铆接特征信息,并将有效频谱图上的每条电压曲线对应的采样点数及其 对应的电压幅值,即“曲线序号
‑
采样点数
‑
电压幅值”,作为一个铆接特征信息; 进而,每个铆钉铆接点均对应得到若干个不同维度的铆接特征信息;
13.3)对每个铆钉铆接点分别提取m个维度的铆接特征信息,形成该铆接点的 信息特征模型;
14.s3、将步骤s2得到的铆接点信息特征模型输入至已完成训练的铆接故障神 经网络识别模型中,得到汽车车身铆接故障类型。
15.进一步地,在步骤s2中,步骤1)之前还需要对对铆接点状态信号进行滤波 处理;其中,滤波处理方法为中位值平均滤波法。
16.该步骤基于在信息采集过程中存在噪声,噪声来源主要为一是整个采集系统 的机械噪声、散弹噪声等固有噪声,这类噪声一般服从高斯分布,因此属于高斯 噪声;二是有源激励信号带来的脉冲等噪声;因此,在对采集信号进行滤波降噪 处理时,采用对两类噪声具有良好滤出效果的线性算法与非线性算法相结合的中 位值平均滤波法;
17.进一步地,在步骤s2中,y的取值范围为6~15。
18.进一步地,在步骤s2中,m的取值范围为11~40。
19.进一步地,该铆接故障神经网络识别模型根据以下两个公式来进行bp神经 网络结构的构建:
[0020][0021][0022]
其中,n代表隐含层层数,n=2~5;n为隐含层神经元个数,每个隐含层神 经元数量n为8个至30个;i为输入神经元个数,其数量与铆接特征信息的维度 数值一致;j为输出层神经元个数,其数量为x 1,包括x种故障铆接状态和一 种正常铆接状态;k为标准样本个数,a为0~10的整数。
[0023]
进一步地,在步骤s3中,对铆接故障神经网络识别模型的训练方法为:
[0024]
将m个维度的铆接特征信息按照顺序依次排列,输入至神经网络中对应的 神经元,输入层神经元和隐含层神经元将处理后的铆接特征信息传递给输出层, 输出层得到识别结果后与期望输出值进行比较,然后根据神经网络的梯度变化 值,通过误差反向传播算法,调整各个神经元的权值和阈值来训练神经网络,直 到神经网络的实际输出值与期望值满足误差设定要求,训练完成;
[0025]
其中,在训练过程中,设定初始种群规模为100,神经网络的最大迭代次数 选择1000,学习率为0.01~0.5,允许误差精度为0.1%;
[0026]
神经网络输入层输出计算采用线性函数,其他层输出计算采用sigmoid型激 活函数;
[0027]
遗传算法的适应度函数采用:
[0028]
一种实现上述汽车车身铆接质量自动在线检测方法的检测系统,包括:
[0029]
机器人模块,其由多自由度机器人机械臂和内设有多种运动轨迹的运动控制 系统构成;运动控制系统与多自由度机器人机械臂内各驱动电机连接,使多自由 度机械臂末端按照运动控制系统规划的铆接点探测路径运动;在多自由度机械臂 末端安装有工装夹具;
[0030]
数据采集模块,其由探测传感器和数据采集装置构成;具体地,探测传感器 由工装夹具夹持,随工装夹具运动至车身上各铆接点进行铆接点状态采集;数据 采集装置与探测传感器相连接,用于接收探测传感器探测到的铆接点状态信号;
[0031]
同步控制模块的一端与机器人模块的运动控制系统相连接、另一端与数据采 集模块的探测传感器相连接,用于触发运动控制系统驱动多自由机械臂按照与检 测对象相符的铆接点探测路径运动的同时,同步触发数据采集模块进行铆接状态 信息采集工作;
[0032]
数据处理与特征提取模块与数据采集模块相连接,用于接收数据采集模块发 送的铆接点状态信号并依次通过信号滤波处理、各铆接点频谱图转换和多维度铆 接特征信息获取,构建得到各铆接点信息特征模型;
[0033]
铆接检测模块与数据处理与特征提取模块相连接,通过将各铆接点信息特征 模型输入至铆接故障神经网络识别模型中,完成汽车车身各铆接点的故障状态检 测和识别。
[0034]
与现有技术相比,该汽车车身铆接质量自动在线检测系统及检测方法能够有 效解决人工检测效率低和因人为因素以致检测误判率高的问题。通过对铆接点处 的缺陷信息进行特征提取与分析,来完成故障的自动识别,提高了车身铆接质量 的检测效率和准确率,可用于大批量铆接车身的重复检验。
附图说明
[0035]
图1为本发明的汽车车身铆接质量自动在线检测方法的流程图;
[0036]
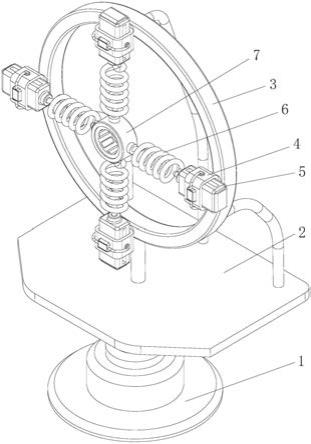
图2为本发明的汽车车身铆接质量自动在线检测方法中探测传感器探测方式 的示意图;
[0037]
图3为本发明的实施例中由各探测点位的反馈电压信号或反馈电流信号得到 的以点位数为横坐标、电压幅值为纵坐标的即铆接板的波谱图;
[0038]
图4(a)为本发明的实施例中第一个铆钉铆接点处对应的频谱图;
[0039]
图4(b)为本发明的实施例中第二个铆钉铆接点处对应的频谱图;
[0040]
图4(c)为本发明的实施例中第三个铆钉铆接点处对应的频谱图;
[0041]
图4(d)为本发明的实施例中第四个铆钉铆接点处对应的频谱图;
[0042]
图5(a)为本发明的实施例中设定的铆钉存在端部缺失故障状态的示意图;
[0043]
图5(b)为本发明的实施例中设定的铆钉存在一字形缺口故障状态的示意图;
[0044]
图5(c)为本发明的实施例中设定的铆钉存在十字形缺口故障状态的示意图;
[0045]
图5(d)为本发明的实施例中设定的铆钉存在钉杆出现1/2及以上缺失故障 状态的示意图;
[0046]
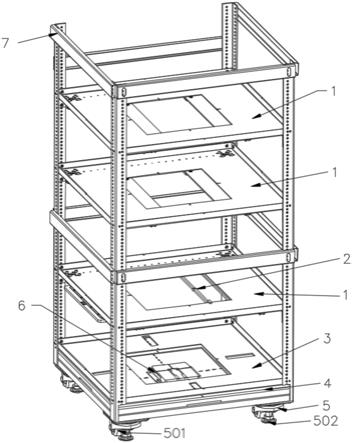
图6为本发明的汽车车身铆接质量自动在线检测系统的结构示意图。
具体实施方式
[0047]
下面结合附图及具体实施例对本发明做进一步的说明,但下述实施例绝非对 本发明有任何限制。
[0048]
实施例1
[0049]
采用本技术的汽车车身铆接质量自动在线检测方法对某车的一块车身的铆 接质量进行检测;其中,该车身板由三层叠放的8mm金属板铆接而成的表面为 曲面的板材,其上共计有五个铆钉。
[0050]
如图1所示,该检测方法的具体实施步骤如下:
[0051]
s1、利用探测传感器采集铆接板的铆接点状态信号;
[0052]
具体地,如图2所示,探测传感器以其探头的探测平面始终保持平行于各探 测点位对应铆接板曲面中心点的切平面的方式,且以恒定的间隔距离沿包含有铆 接板上全部铆接点的探测路径持续向铆接板发射电压信号,以得到各探测点位的 反馈电压信号,即铆接板的铆接点状态信号。
[0053]
其中,探测传感器探头的探测平面与各探测点位对应铆接板曲面中心点的切 平面的间隔距离应满足:各探测点位的反馈电压信号或反馈电流信号达到后续的 数据处理需求。
[0054]
如图3所示为有各探测点位的反馈电压信号或反馈电流信号得到的以点位数 为横坐标、电压幅值为纵坐标的即铆接板的波谱图。
[0055]
s2、对步骤s1采集的铆接点状态信号进行处理,得到铆接点信息特征模型;
[0056]
具体地,该步骤s2的具体实施步骤为:
[0057]
s201、对铆接点状态信号以中位值平均滤波法的方式进行滤波处理,去除固 有噪声和脉冲噪声;
[0058]
s202、采用基于emd算法的希尔伯特
‑
黄变换的方法对对经过步骤s201的 滤波处理后的铆接点状态信号进行emd分解,得到不同尺度的固有模态函数 imf分量,进而对各尺度下的固有模态函数imf分量进行希尔伯特
‑
黄变换得到 各采样点位对应包含有6条电压曲线的频谱图;
[0059]
s203、在步骤s202得到的频谱图中提取各个铆钉铆接点处的有效频谱图作 为单个铆钉的铆接特征信息,并将有效频谱图上的每条电压曲线对应的采样点数 及其对应的电压幅值,即“曲线序号
‑
采样点数
‑
电压幅值”,作为一个铆接特征信 息;进而,每个铆钉铆接点均对应得到若干个不同维度的铆接特征信息;
[0060]
如图4(a)所示为第一个铆钉铆接点处对应的频谱图;如图4(b)所示为 第二个铆钉铆接点处对应的频谱图;如图4(c)所示为第三个铆钉铆接点处对应 的频谱图;如图4(d)所示为第四个铆钉铆接点处对应的频谱图。
[0061]
s204、对每个铆钉铆接点分别提取m个维度的铆接特征信息,形成该铆接 点的信息特征模型;
[0062]
在本实施例中,对每个铆钉铆接点分别提取11个维度的铆接特征信息,包 括:6条特征曲线对应的6个峰值高度,以及各峰值高度之间产生的5个偏差值。 其中,需要说明的
是,铆接特征信息数量的选取并不是固定的,可以依据识别的 故障缺陷大小程度要求进行调整,例如如果对细小故障的识别率要求高,那么铆 接特征信息的维度数量就理应增加。
[0063]
s3、将步骤s2得到的铆接点信息特征模型输入至已完成训练的铆接故障神 经网络识别模型中,得到汽车车身铆接故障类型。
[0064]
具体地,该铆接故障神经网络识别模型采用基于遗传算法的前馈神经网络, 通过设定多层神经网络的结构模型以及优化隐含层神经元个数,将铆接点信息特 征模型作为输入信息,将不同类型铆接故障结果作为输出信息,从而完成故障特 征的识别。
[0065]
(一)该铆接故障神经网络识别模型根据以下两个公式来进行bp神经网络 结构的构建:
[0066][0067][0068]
其中,n代表隐含层层数,n=2;n为隐含层神经元个数,第一隐含层神经 元数量n为14个,第二层隐含层神经元数量n为10个;i为输入神经元个数, 其数量为m(即经过步骤s2提取的m个维度的铆接特征信息);j为输出层神 经元个数,其数量为4,包括三种故障铆接状态和一种正常铆接状态;k为标准 样本个数,a为0~10的整数;
[0069]
具体地,在本实施例中,三种故障铆接状态具体包括:如图5(a)所示的铆 钉存在端部缺失故障,如图5(b)或图5(c)所示的铆钉存在一字形缺口故障 或十字形缺口故障,如图5(d)所示的铆钉存在钉杆轴向断裂故障;对应地,正 常铆接状态,即铆钉不存在上述三种故障。
[0070]
(二)铆接故障神经网络识别模型的训练方法为:
[0071]
采用遗传算法对上述铆接故障神经网络模型的初始权值和阈值进行优化;具 体地,根据本实施例中设定的三种铆接故障类型和一种正常类型,选取与设定类 型相符且类型数量均布的200组检测样本作为训练样本作为输入信息输入至神经 网络中进行训练;其中,每组检测样本包括铆钉对应的m个维度的铆接特征信 息,且该m个维度的铆接特征的个数与排列顺序分别与模型构建的输入神经元 个数i与排列顺序一一对应;
[0072]
在训练过程中,设定初始种群规模为100,神经网络的最大迭代次数选择 1000,学习率为0.01~0.5,允许误差精度为0.1%;
[0073]
设定遗传算法的适应度函数为:
[0074]
该适应度函数值为误差平方和的倒数,通过运用改进型自适应梯度下降法实 现搜寻铆接故障神经网络识别模型的参数的最优值;进而将寻优后的初始权值与 阈值设定为铆接故障神经网络识别模型的相应参数,选择线性函数和sigmoid型 激活函数计算神经网络各层的输出,根据检测信息来进行神经网络的学习训练。
[0075]
在具体训练过程中,将m个维度的铆接特征信息按照顺序依次排列,输入 至神经网络中对应的各神经元中,输入层神经元和隐含层神经元将处理后的铆接 特征信息传递给输出层,输出层得到识别结果后与期望输出值进行比较,然后根 据神经网络的梯度变化
值,通过误差反向传播算法,调整各个神经元的权值和阈 值来训练神经网络,直到神经网络的实际输出值与期望值满足误差设定要求,训 练完成。然后利用100组铆接测试样本对检测结果进行验证,检测成功率为100%。
[0076]
在本实施例中,通过步骤s3对步骤s2所得的四幅频谱图对应的四个铆接点 的铆接状态进行判断。具体地,图4(a)对应的第一个铆钉铆接点的铆接状态输 出结果为正常,图4(b)对应的第二个铆钉铆接点的铆接状态输出结果为铆钉存 在端部缺失故障,图4(c)对应的第三个铆钉铆接点的铆接状态输出结果为铆钉 轴向断裂故障,图4(d)对应的第四个铆钉铆接点的铆接状态输出结果为铆钉存 在一字形或十字形缺口故障。
[0077]
实施例2
[0078]
如图6所示,该汽车车身铆接质量自动在线检测系统,包括机器人模块、数 据采集模块、同步控制模块、数据处理与特征提取模块和铆接检测模块;其中,
[0079]
机器人模块包括多自由度机器人机械臂和内设有多种运动轨迹的运动控制 系统;运动控制系统与多自由度机器人机械臂内各驱动电机连接,使多自由度机 械臂末端按照运动控制系统规划的铆接点探测路径运动;在多自由度机械臂末端 安装有工装夹具,用于夹持探测传感器;
[0080]
在具体实施过程中,机器人模块的运动控制系统根据待检测车身规格和铆接 工艺对应的检测任务需求,选取合适的运动轨迹对车身上各铆接点进行探测,以 实现多自由度机械臂末端以合适的探测距离依次探测得到各铆接点的电压反馈 信号或电流反馈信号;
[0081]
数据采集模块包括探测传感器和数据采集装置;具体地,
[0082]
探测传感器由工装夹具夹持,随工装夹具运动至车身上各铆接点进行铆接点 状态采集;其工作原理在于:当车身铆接点处存在断裂、裂纹等缺陷形式或者铆 接形态发生改变时,都会使得探测传感器接收到的电压反馈信号或电流反馈信号 发生变化,从而将这些变化作为识别正常铆接状态与故障铆接状态的技术依据;
[0083]
数据采集装置与探测传感器相连接,其用于接收探测传感器探测到的铆接点 状态信号,即电压反馈信号或电流反馈信号;
[0084]
同步控制模块的一端与机器人模块的运动控制系统相连接、另一端与数据采 集模块的探测传感器相连接,用于触发运动控制系统驱动多自由机械臂按照与检 测对象相符的铆接点探测路径运动的同时,同步触发数据采集模块进行铆接状态 信息采集工作;具体地,该同步控制模块基于i/o脉冲信号同步触发运动控制系 统和数据采集模块;
[0085]
数据处理与特征提取模块与数据采集模块相连接,用于接收数据采集模块发 送的铆接点状态信号并依次通过信号滤波处理、各铆接点频谱图转换和多维度铆 接特征信息获取,构建得到各铆接点信息特征模型;
[0086]
铆接检测模块与数据处理与特征提取模块相连接,通过将各铆接点信息特征 模型输入至铆接故障神经网络识别模型中,完成汽车车身各铆接点的故障状态检 测和识别。
[0087]
以上公开的发明实施例只是用于帮助阐述本发明。本发明实施例并没有详细 叙述所有细节,也不限制该发明仅为所述的具体实施方式。任何熟悉本技术领域 的技术人员,在本发明的范围内的改变与替换,都应涵盖于本发明的保护范围之 内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。