1.本技术涉及粒度检测技术领域,尤其是涉及一种基于深度学习的粒度在线检测系统。
背景技术:
2.近些年,建筑业随着社会的发展变得越来越好,而且也越来越规范化,单单从建筑用混凝土碎石规格就可以看出,不同地方使用的碎石骨料大小是需要严格把控的。当然这也对碎石骨料生产加工企业提出了更高的要求,要保证碎石骨料规格大小,注重成品品质。
3.有色金属冶炼行业在其矿石解离工序中使用多层破碎机对大块矿石进行破碎,破碎后的矿石粒度检测,也存在碎石骨料生产企业面临的类似的状况。
4.目前采用传统的图像分析方法对粒度进行检测时,采用图像采集装置对骨料拍照和分析,视觉工控机对采集的图片进行粒径分析,但现场的灰尘较大,灰尘对视觉工控机的影响大,会降低视觉工控机的使用寿命。
技术实现要素:
5.为了延长视觉工控机的使用寿命,本技术提供了一种基于深度学习的粒度在线检测系统。
6.本技术提供的一种基于深度学习的粒度在线检测系统,采用如下的技术方案:一种基于深度学习的粒度在线检测系统,包括设置在传送带上的遮罩,以及图像采集装置、光源、光纤收发器和视觉工控机,所述图像采集装置和光源位于遮罩内,且图像采集装置和光源位于传送带的上方,所述光纤收发器有两组,两组光纤收发器之间通过光纤连接,其中一组光纤收发器和图像采集装置连接,另一组光纤收发器和视觉工控机连接。
7.通过采用上述技术方案,图像采集装置采集传送带上碎石的图像信息,图像信息经过光纤收发器、光纤输送给视觉工控机,视觉工控机对碎石的粒径进行分析。通过光纤收发器和光纤的设置,可实现远距离传输,使视觉工控机可设置在远离破碎现场的中控室内,进而减少灰尘对视觉工控机的影响,延长视觉工控机的实用寿命。同时,遮罩可遮挡外界环境的光线和灰尘,减少外界环境光线和灰尘对图像采集装置成像的影响,通过光源提供稳定的照明,可提高成像的稳定性。
8.可选的,所述图像采集装置采用工业相机ccd。
9.通过采用上述技术方案,工业相机ccd具有体积小、功耗低和受干扰程度低的优点。
10.可选的,包括告警设备,所述告警设备和视觉工控机连接。
11.通过采用上述技术方案,视觉工控机检测到超规事件,告警设备进行报警,便于工作人员对超规事件进行核查。
12.可选的,所述光源的数目有两组,两组光源分别位于工业相机ccd沿传送带输送方向的两侧。
13.通过采用上述技术方案,两组光源一前一后对传送带上的碎石进行照明,能提高良好的照明,减少照明死角,便于图像的分割。
14.可选的,所述视觉工控机上设有支持并行运算的cpu和gpu。
15.通过采用上述技术方案,gpu用于图像分割处理,cpu用于计算碎石的粒径,通过并行运算,可提高处理速度。
16.可选的,所述遮罩上设有旋转驱动组件、横向驱动组件和清洁辊,所述旋转驱动组件用于驱动清洁辊转动,所述横向驱动组件用于横向驱动清洁辊靠近或远离工业相机cdd。
17.通过采用上述技术方案,横向驱动组件驱动清洁辊靠近工业相机cdd,旋转驱动组件驱动清洁辊转动,清洁辊可清理工业相机cdd镜头上的灰尘,清理完后,横向驱动组件驱动清洁辊远离工业相机cdd,使清洁辊不影响工业相机cdd的拍照。
18.可选的,所述旋转驱动组件包括转筒和第一花键轴,所述转筒和遮罩转动连接,所述第一花键轴和转筒配合插接,所述清洁辊和第一花键轴靠近工业相机cdd的一端固定连接。
19.通过采用上述技术方案,转动转筒,转筒能带动第一花键轴转动,第一花键轴带动清洁辊转动,清洁辊可清洁工业相机cdd的镜头。
20.可选的,所述横向驱动组件包括圆筒和第二花键轴,所述圆筒和转筒固定连接,圆筒和转筒同轴线设置,圆筒的周面设有导向槽,所述遮罩的侧壁固定有连接筒,所述第二花键轴和连接筒配合插接,第二花键轴远离工业相机cdd的一端设有导向杆,所述导向杆远离第二花键轴的一端伸进导向槽内并与圆筒滑动连接,所述第二花键轴靠近工业相机cdd的一端设有连接片,所述第一花键轴上设有限位块,所述限位块和连接片转动连接。
21.通过采用上述技术方案,转动转筒,圆筒跟随转筒同步转动,导向杆沿着导向槽在圆筒上滑动,导向杆在沿着导向槽滑动的过程中,导向杆带动第二花键轴在连接筒上滑动,第二花键轴靠近或远离工业相机cdd,而连接片驱动限位块,进而带动第二花键轴靠近或远离工业相机cdd,实现清洁辊的横向移动。
22.可选的,所述导向槽包括第一连接槽、第二连接槽和第三连接槽,所述第一连接槽位于圆筒远离工业相机cdd的一端,第一连接槽沿圆筒的周向方向设置,所述第二连接槽位于圆筒靠近工业相机cdd的一端,第二连接槽沿圆筒的周向方向设置,所述第三连接槽倾斜设置,第三连接槽倾的两端分别和第一连接槽、第三连接槽连通。
23.通过采用上述技术方案,导向杆从第一连接槽滑向第二连接槽,清洁辊向靠近工业相机cdd方向移动;导向杆从第二连接槽滑向第一连接槽,清洁辊向远离工业相机cdd方向移动。
24.综上所述,本技术包括以下至少一种有益技术效果:1.通过光纤收发器和光纤的设置,可实现远距离传输,使视觉工控机可设置在远离破碎现场的中控室内,进而减少灰尘对视觉工控机的影响,延长视觉工控机的实用寿命。
25.2.遮罩可遮挡外界环境的光线和灰尘,减少外界环境光线和灰尘对图像采集装置成像的影响,通过光源提供稳定的照明,可提高成像的稳定性。
26.3.gpu用于图像分割处理,cpu用于计算碎石的粒径,通过两者的并行运算,可提高处理速度。
27.4.视觉工控机检测到超规事件,告警设备进行报警,便于工作人员对超规事件进
行核查。
附图说明
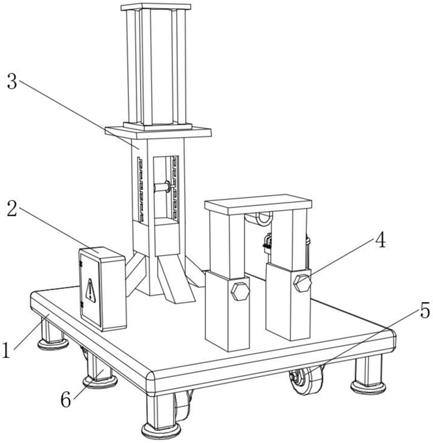
28.图1是本技术一种基于深度学习的粒度在线检测系统的结构示意图;图2是实施例1中旋转驱动组件和横向驱动组件的示意图;图3是实施例2中旋转驱动组件和横向驱动组件的示意图。
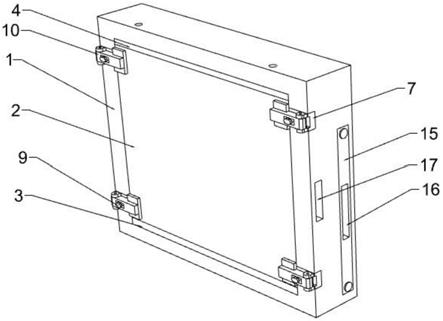
29.附图标记说明:1、传送带;2、遮罩;21、图像采集装置;22、光源;23、连接筒;3、光纤收发器;31、光纤;4、视觉工控机;5、告警设备;6、旋转驱动组件;61、转筒;62、第一花键轴;63、手柄;64、限位块;65、环形槽;7、横向驱动组件;71、圆筒;72、第二花键轴;73、导向槽;731、第一连接槽;732、第二连接槽;733、第三连接槽;74、导向杆;75、连接片;8、清洁辊;9、方形杆。
具体实施方式
30.以下结合附图1
‑
3对本技术作进一步详细说明。
31.本技术实施例公开一种基于深度学习的粒度在线检测系统。
32.实施例1参照图1,粒度在线检测系统包括设置在传送带1上的遮罩2,以及图像采集装置21、光源22、光纤收发器3、视觉工控机4和告警设备5,图像采集装置21和光源22固定在遮罩2内,且图像采集装置21和光源22位于传送带1的正上方。光纤收发器3有两组,两组光纤收发器3之间通过光纤31连接,光纤31的长度可根据实际需要进行设置。其中一组光纤收发器3和图像采集装置21连接,另一组光纤收发器3和视觉工控机4连接,告警设备5和视觉工控机4连接。
33.在本实施中,图像采集装置21采用工业相机ccd,图像采集装置21也可采用摄像机。告警设备5可采用报警灯,当视觉工控机4检测超规事件,视觉工控机4控制报警灯亮起,以发光的形式进行告警;告警设备5也可采用蜂鸣器,当视觉工控机4检测超规事件,视觉工控机4控制蜂鸣器响起,以声音的形式进行告警;当然,告警设备5也可同时采用报警灯和蜂鸣器。
34.光源22固定在遮罩2的侧壁上,光源22的数目设置有两组,两组光源22分别位于工业相机ccd沿传送带1输送方向的两侧,两组光源22分别向工业相机ccd方向倾斜设置。
35.光源22用于提供照明,工业相机ccd对传送带1上碎石进行拍照,得到碎石的图像信息,图像信息经过光电转换后经过光纤31传输给视觉工控机4,视觉工控机4对图像信息进行处理并计算碎石的粒径。通过光纤收发器3和光纤31的设置,可图像信息远距离实时传输到视觉工控机4上。当视觉工控机4检测到大于预设粒径的碎石的数量大于预设数量时,则判定为超规事件,并对超规事件进行显示,同时控制告警设备5进行工作,便于工作人员及时对超规事件进行核查。
36.视觉工控机4上设有支持并行运算的cpu和gpu,gpu的型号为1080ti。gpu用于图像分割处理,cpu用于计算碎石的粒径,通过两者的并行运算,可提高处理速度。
37.参照图1和图2,遮罩2相邻光源22的侧壁上设置有旋转驱动组件6、横向驱动组件7和清洁辊8,在本实施例中,旋转驱动组件6包括转筒61和第一花键轴62,转筒61和遮罩2的
侧壁转动连接,转筒61贯穿遮罩2的侧壁,转筒61水平设置。转筒61位于遮罩2外的端部固定有手柄63,手柄63呈l型,手柄63和遮罩2的外壁接触。第一花键轴62和转筒61配合插接,第一花键轴62位于转筒61的轴线位置,第一花键轴62可沿转筒61的长度方向滑动。清洁辊8固定在第一花键轴62靠近工业相机ccd的一端,清洁辊8位于第一花键轴62的轴线位置,清洁辊8的周面均匀分布有柔软的刷毛。
38.横向驱动组件7包括圆筒71和第二花键轴72,圆筒71位于遮罩2内,圆筒71和转筒61固定连接,圆筒71和转筒61同轴线设置,圆筒71的直径大于转筒61的直径,圆筒71套设于转筒61。圆筒71的周面设置有导向槽73,导向槽73包括第一连接槽731、第二连接槽732和第三连接槽733,第一连接槽731位于圆筒71远离工业相机cdd的一端,第一连接槽731沿圆筒71的周向方向设置,第二连接槽732位于圆筒71靠近工业相机cdd的一端,第二连接槽732沿圆筒71的周向方向设置,第二连接槽732的长度大于第一连接槽731的长度。第三连接槽733倾斜设置,第三连接槽733的两端分别和第一连接槽731、第三连接槽733连通。
39.遮罩2的侧壁固定有连接筒23,连接筒23位于圆筒71的上方,第二花键轴72水平设置,第二花键轴72和连接筒23配合插接,第二花键轴72可沿着连接筒23的方向滑动。第二花键轴72远离工业相机cdd的一端固定有导向杆74,导向杆74垂直于第二花键轴72,导向杆74远离第二花键轴72的一端伸进导向槽73内并与圆筒71滑动连接。第二花键轴72靠近工业相机cdd的一端固定有连接片75,连接片75垂直于第二花键轴72,第一花键轴62上设有限位块64,限位块64的侧壁上开设有环形槽65,连接片75通过环形槽65和限位块64转动连接。手柄63转动最低点的位置时,导向杆74的端部位于第一连接槽731内。
40.通过转动手柄63,手柄63带动转筒61转动,转筒61带动第一花键轴62和圆筒71同步转动,第一花键轴62带动清洁辊8转动,灰尘在离心力的作用下从清洁辊8上掉落。导向杆74通过第三连接槽733从第一连接槽731滑向第二连接槽732,清洁辊8向靠近工业相机cdd方向移动;当导向杆74在第二连接槽732内滑动时,清洁辊8的刷毛和工业相机cdd的镜头接触,清洁辊8转动,清洁辊8的刷毛可对工业相机cdd的镜头进行清洁。导向杆74从第二连接槽732滑向第一连接槽731,清洁辊8向远离工业相机cdd方向移动;导向杆74在第一连接槽731内滑动时,清洁辊8完成脱离工业相机cdd,且不会影响工业相机cdd的拍照。通过清洁辊8往复多次进行清洁,可有效清理工业相机cdd镜头上的灰尘。
41.实施例1的实施原理为:图像采集装置21采集传送带1上碎石的图像信息,图像信息经过光纤收发器3、光纤31输送给视觉工控机4,视觉工控机4对碎石的粒径进行分析。通过光纤收发器3和光纤31的设置,可实现远距离传输,使视觉工控机4可设置在远离破碎现场的中控室内,进而减少灰尘对视觉工控机4的影响,延长视觉工控机4的实用寿命。同时,遮罩2可遮挡外界环境的光线和灰尘,减少外界环境光线和灰尘对图像采集装置21成像的影响,通过光源22提供稳定的照明,可提高成像的稳定性。
42.实施例2参照图3,本实施例与实施例1的不同之处在于,横向驱动组件7包括方形杆9,方形杆9水平设置,方形杆9贯穿遮罩2的侧壁并与遮罩2滑动连接,方形杆9靠近工业相机cdd的一端固定有连接片75,连接片75垂直于第二花键轴72,第一花键轴62上设有限位块64,限位块64的侧壁上开设有环形槽65,连接片75通过环形槽65和限位块64转动连接。
43.实施例2的实施原理为:通过转动手柄63,手柄63带动转筒61转动,转筒61带动第
一花键轴62和圆筒71同步转动,第一花键轴62带动清洁辊8转动。向相机cdd方向推动方形杆9,清洁辊8向靠近工业相机cdd方向移动,使清洁辊8的刷毛和工业相机cdd的镜头接触,清洁辊8转动时,清洁辊8的刷毛可对工业相机cdd的镜头进行清洁。完成清洁后,向远离相机cdd方向拉动方形杆9,清洁辊8向远离工业相机cdd方向移动,直至清洁辊8完成脱离工业相机cdd,清洁辊8不会影响工业相机cdd的拍照。
44.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。