1.本发明属于无人船技术领域,涉及一种组合式多功能无人船。
背景技术:
2.我国湖泊、河流、江海众多,洪涝灾害。一些企业非法将污染物排入水源当中,水域的环境压力日益严峻,给大家的日常生活带来很多不便。
3.目前,对水域较远的环境监测大多采用建立自动监测站和人工采集的方式,建立自动监测站的监测点是固定的,所述即使监测到有污染超标,并不能进行扩大监测点,无法找到污染起源点,及时切断污染,减少后续的损失。而常依赖人工划船进入水域采集水样再到岸上分析检测,对于复杂多变的水体环境危险性未知,造成很大部分水域人工也无法驾船驶入进行采集水样,降低了水域环境监测的效果。
技术实现要素:
4.本发明目的在于提供一种组合式多功能无人船,以解决现有水域环境监测依赖人工划船进入水域采集水样再到岸上分析检测,对于复杂多变的水体环境危险性未知,造成很大部分水域人工也无法驾船驶入进行采集水样,降低了水域环境监测的效果的技术问题。
5.为实现上述目的,本发明一种组合式多功能无人船的具体技术方案如下:
6.一种组合式多功能无人船,包括:
7.船体;
8.两个舱体,对称设置在船体的两侧;
9.四个连接件,分别设置在两个舱体与船体之间,每一个连接件的两端分别与船体、对应舱体可拆卸连接,相邻的两个所述连接件靠近对应舱体的端部分别向对应舱体的两端倾斜,四个连接件用于调节舱体与两个舱体之间的相对位置;
10.监测模块,设置在船体内部,用于对水域中的水质进行监测;
11.两个驱动模块,分别设置在两个舱体内部,用于通过两个舱体带动船体移动;
12.两个控制模块,分别设置在两个舱体内部,分别与对应的驱动模块电连接,用于控制对应驱动模块的启停。
13.本发明的特点还在于:
14.其中每一个连接件包括四个连接杆,四个连接杆依次首尾相连组成平行四边形且平行四边形竖向设置,相邻两个连接杆之间铰接,两侧的两个连接杆分别与船体、对应舱体可拆卸连接,船体与两个舱体之间分别设置有两个电动推杆,两个电动推杆分别位于对应两个连接件的上部,每一个电动推杆的一端与舱体铰接,每一个电动推杆的另一端与上部的连接杆杆身铰接。
15.其中每一个控制模块内部设置有卫星定位模块,卫星定位模块用于导航、定位与记录水域位置信息。
16.其中监测模块包括存储模块、无线传输模块与水质传感器,水质传感器分别与存储模块、无线传输模块电连接,水质传感器用于检测水质数据并将检测到的水质数据发送到存储模块进行存储同时将检测到的水质数据发送到无线传输模块进行数据时时传输。
17.其中还包括控制终端,控制终端分别与两个控制模块、无线传输模块连接,控制终端用于对两个控制模块发送指令并接收来自卫星定位模块记录的位置信息,同时接收来自无线传输模块发送的水质数据,然后将位置信息与水质数据进行整合得到一个完整的立体化的水域水质地图,最后对多个水域水质地图进行分析并经过计算得到主要污染区域、污染物走向、污染物来源。
18.其中水质数据包括温度、导电率、溶解氧、酸碱度、浊度、蓝绿藻、bod、cod、重金属。
19.本发明的一种组合式多功能无人船具有以下优点:
20.第一,通过船体、两个舱体、四个连接件、监测模块与两个驱动模块的配合设置,能够带动船体在复杂多变的水体环境中自由行进,对复杂多变的水体环境进行水质的直接分析检测,提高了水域环境监测的效果;
21.第二,通过四个连接件的设置,不仅能够调整船体高度规避障碍,而且能够调整船体与两个舱体之间的距离,从而能够在水路变窄时,缩短舱体与两个舱体之间距离以适应环境,从而提高对复杂多变的水体环境应变能力进一步提高水域环境监测的效果;
22.第三,通过无线传输模块、水质传感器、卫星定位模块与控制终端的设置,能够将位置信息与水质数据进行整合得到一个完整的立体化的水域水质地图,从而得到主要污染区域、污染物走向、污染物来源,进一步提高水域环境监测的效果。
附图说明
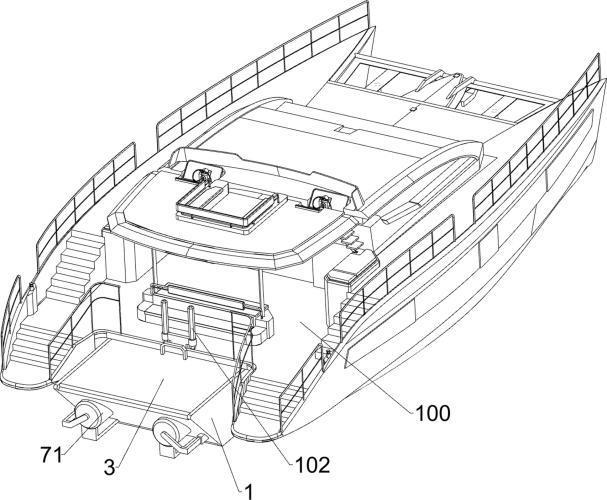
23.图1为本发明的整体俯视结构示意图;
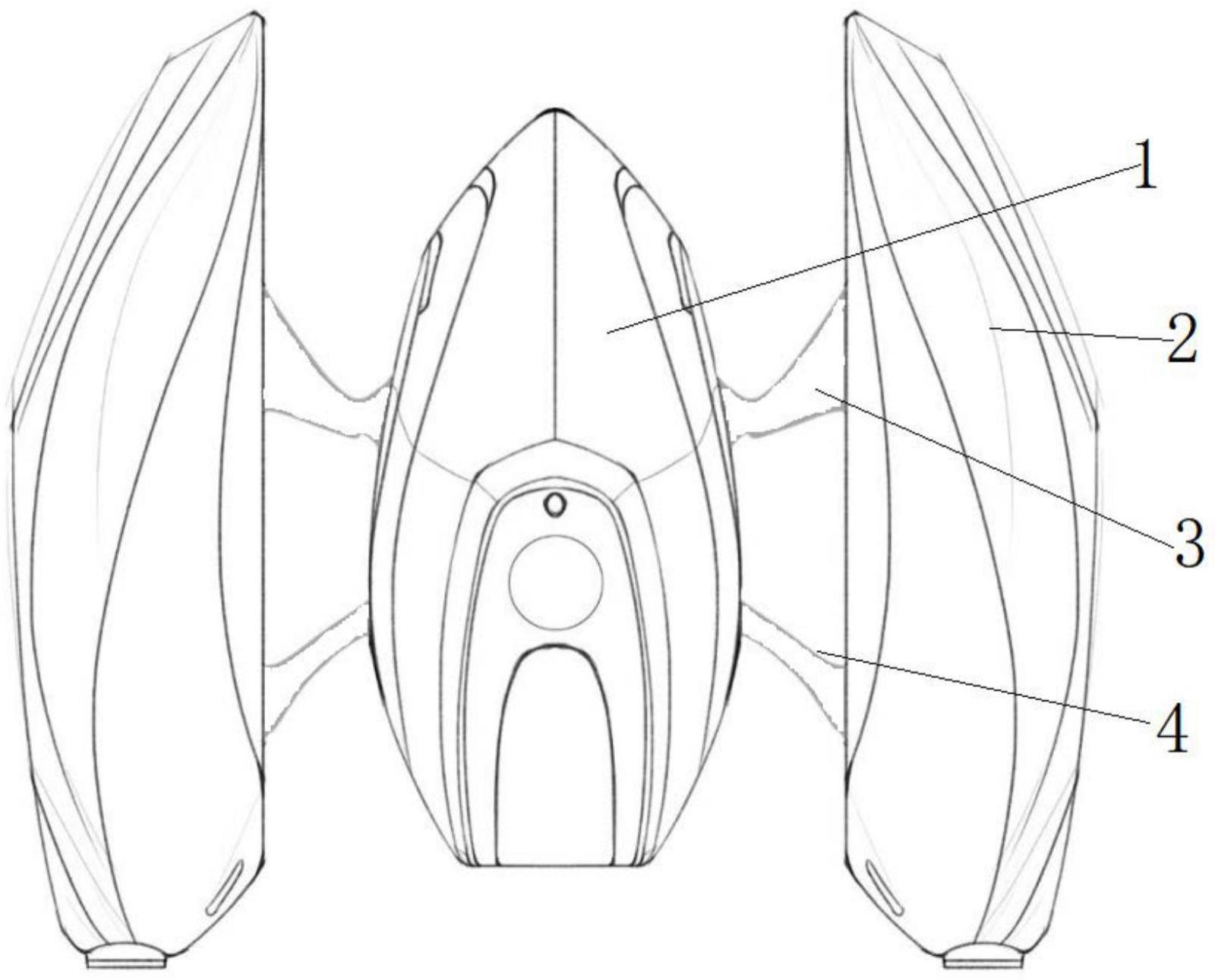
24.图2为本发明中连接件的主视结构示意图;
25.附图标记:
26.1、船体;2、舱体;3、连接件;4、连接杆;5、电动推杆。
具体实施方式
27.为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明一种组合式多功能无人船做进一步详细的描述。
28.如图1所示,本发明一种组合式多功能无人船,包括船体1,船体1的两侧对称设置有两个舱体2,两个舱体2与船体1之间分别设置有两个连接件3,每一个连接件3的两端分别与船体1、对应舱体2可拆卸连接,便于在较窄的水域将舱体2单独使用,加强水域环境监测等能力,相邻的两个连接件3靠近对应舱体2的端部分别向对应舱体2的两端倾斜,四个连接件3用于调节舱体2与两个舱体2之间的相对位置,通过降低舱体2的高度,从而规避障碍,同时通过调整舱体2与两个舱体2之间的距离,如果水路变窄,缩短舱体2与两个舱体2之间距离以适应环境,船体1内部设置有监测模块,监测模块用于对水域中的水质进行监测,两个舱体2内部分别设置有驱动模块,驱动模块用于通过两个舱体2带动船体1移动,也可单独驱动舱体2作为小船使用,两个舱体2内部分别设置有控制模块,控制模块与对应的驱动模块电连接,用于控制对应驱动模块的启停,从而能够对复杂多变的水体环境进行水质的直接
分析检测,提高了水域环境监测的效果。
29.如图2所示,每一个连接件3包括四个连接杆4,四个连接杆4依次首尾相连组成平行四边形且平行四边形竖向设置,相邻两个连接杆4之间铰接,两侧的两个连接杆4分别与船体1、对应舱体2可拆卸连接,船体1与两个舱体2之间分别设置有两个电动推杆5,两个电动推杆5分别位于对应两个连接件3的上部,每一个电动推杆5的一端与舱体2铰接,电动推杆5的端部与舱体2铰接处于舱体2可拆卸连接,便于将连接件3拆下,每一个电动推杆5的另一端与上部的连接杆4杆身铰接,通过两个电动推杆5的伸缩,调整对应四个连接杆4形成平行四边形的夹角,从而调整船体1高度的同时调整船体1与两个舱体2之间的距离,两个电动推杆5与对应的控制模块电连接,通过控制模块控制两个电动推杆5的伸缩。
30.每一个控制模块内部设置有卫星定位模块,卫星定位模块用于导航、定位与记录水域位置信息。
31.监测模块包括存储模块、无线传输模块与水质传感器,水质传感器分别与存储模块、无线传输模块电连接,水质传感器用于检测水质数据并将检测到的水质数据发送到存储模块进行存储同时将检测到的水质数据发送到无线传输模块进行数据时时传输。
32.本发明一种组合式多功能无人船,还包括控制终端,控制终端分别与两个控制模块、无线传输模块连接,控制终端用于对两个控制模块发送指令并接收来自卫星定位模块记录的位置信息,同时接收来自无线传输模块发送的水质数据,然后将位置信息与水质数据进行整合得到一个完整的立体化的水域水质地图,最后对多个水域水质地图进行分析并经过计算得到主要污染区域、污染物走向、污染物来源。
33.水质数据包括温度、导电率、溶解氧、酸碱度、浊度、蓝绿藻、bod、cod、重金属。
34.工作原理:使用时,将船体1与两个舱体2通过四个连接件3连接之后放入需要检测的水域中,然后通过控制终端发送控制指令到两个控制模块,两个控制模块分别控制对应的驱动模块带动两个舱体2在水域中行进,两个舱体2带动船体1在水域中行进,通过水质传感器检测水质数据并将检测到的水质数据发送到存储模块进行存储同时将检测到的水质数据发送到无线传输模块进行数据时时传输,传输到控制终端,同时控制终端接收来自卫星定位模块记录的位置信息,然后将位置信息与水质数据进行整合得到一个完整的立体化的水域水质地图,最后对多个水域水质地图进行分析并经过计算得到主要污染区域、污染物走向、污染物来源。
35.本发明的一种组合式多功能无人船具有以下优点:
36.第一,通过船体、两个舱体、四个连接件、监测模块与两个驱动模块的配合设置,能够带动船体在复杂多变的水体环境中自由行进,对复杂多变的水体环境进行水质的直接分析检测,提高了水域环境监测的效果;
37.第二,通过四个连接件的设置,不仅能够调整船体高度规避障碍,而且能够调整船体与两个舱体之间的距离,从而能够在水路变窄时,缩短舱体与两个舱体之间距离以适应环境,从而提高对复杂多变的水体环境应变能力进一步提高水域环境监测的效果;
38.第三,通过无线传输模块、水质传感器、卫星定位模块与控制终端的设置,能够将位置信息与水质数据进行整合得到一个完整的立体化的水域水质地图,从而得到主要污染区域、污染物走向、污染物来源,进一步提高水域环境监测的效果。
39.可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱
离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本发明所保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。