1.本发明涉及海洋装备着陆器领域,尤其涉及一种基于仿生原理的无动力底层漂流着陆器。
背景技术:
2.深海着陆器利用自身重力抵达海底,执行坐底观察及采样等作业,再通过抛载实现上浮。通常来讲,着陆器一旦坐底就不能移动,其主要影响因素是受到了能量供给和系统复杂度的限制。cn216611553u公开了一种深海着陆器,通过增加电量、推进器及声学通信设备,为自身提供了一定的机动能力,但同时增加了系统复杂度和整体重量;且系统构成向无人潜水器靠拢,大幅提高了研发成本。
3.因此,在充分利用着陆器的无动力和低成本特性基础上,提高其机动能力,有利于扩展其在深海科学研究及探索中的应用场景。
技术实现要素:
4.针对上述现有技术中的不足,本发明提供一种基于仿生原理的无动力底层漂流着陆器,基于蜘蛛吐丝飞行的仿生原理,将传统着陆器的刚性连接,转变为柔性缆连接;利用海流对柔性缆的推动作用,实现了着陆器在近底附近的无动力巡航。
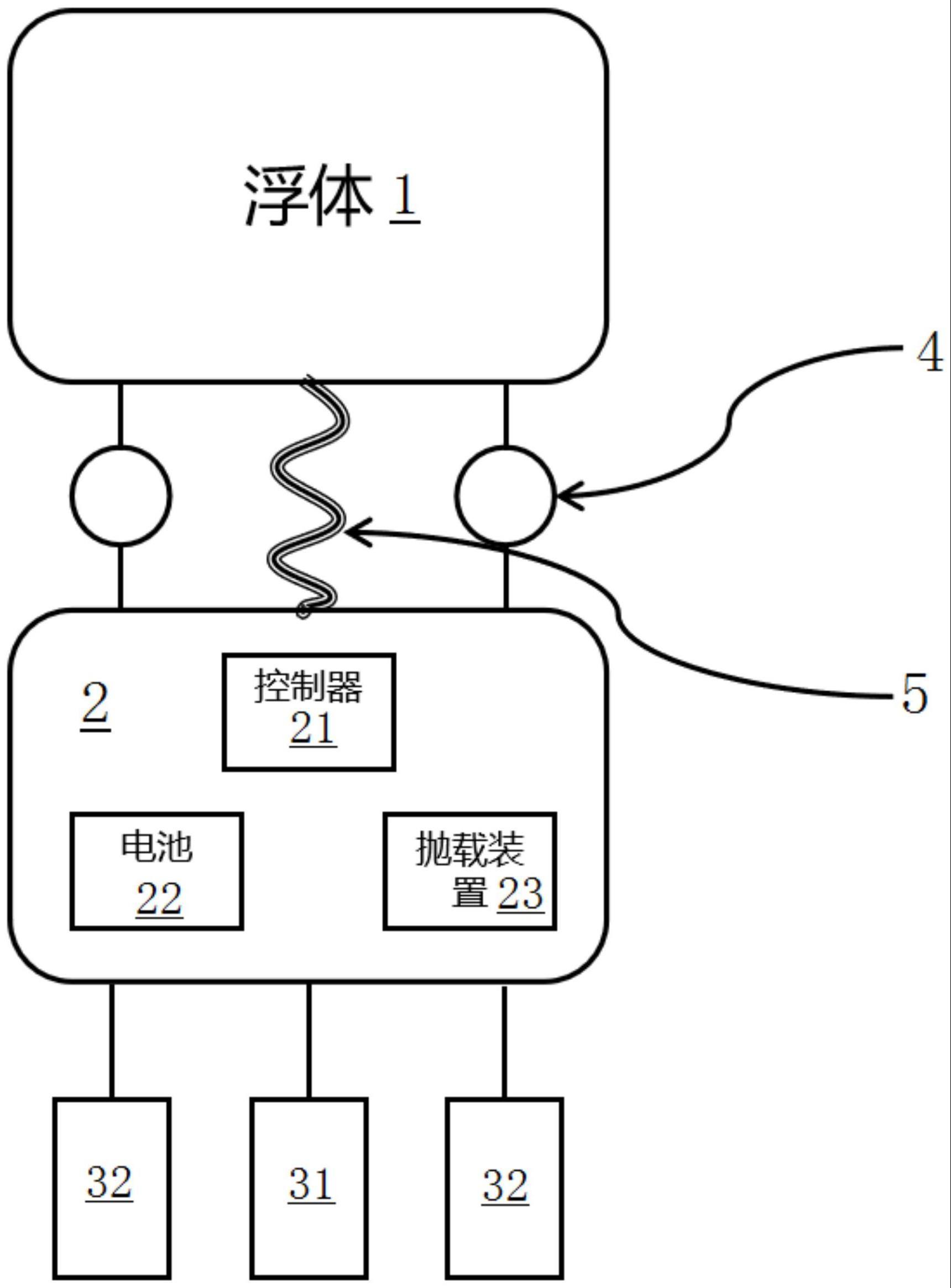
5.为了实现上述目的,本发明提供一种基于仿生原理的无动力底层漂流着陆器,包括一浮体、一着陆器本体、若干吊挂装置、一柔性承重缆和多个压载;所述浮体通过所述吊挂装置连接所述着陆器本体;所述柔性承重缆松弛连接于所述浮体与所述着陆器本体之间;所述着陆器本体包括一控制器以及连接于所述控制器的一电池和多个抛载装置;所述抛载装置连接所述压载;所述控制器还连接所述吊挂装置。
6.优选地,所述抛载装置包括机械式抛载装置、电磁式抛载装置、电化学熔断抛载装置或上电消磁式电磁吸附装置。
7.优选地,所述吊挂装置包括机械式吊挂装置、电磁式吊挂装置、电化学熔断吊挂装置或上电消磁式电磁吸附装置。
8.优选地,所述着陆器本体还包括一浮力装置。
9.优选地,所述浮力装置包括一橡胶囊、一油泵和一供油装置;所述供油装置通过管道连接所述橡胶囊,所述油泵安装于所述管道上;所述橡胶囊安装于所述着陆器本体。
10.优选地,所述浮力装置包括若干垂向推进器;所述垂向推进器安装于所述着陆器本体。
11.本发明由于采用了以上技术方案,使其具有以下有益效果:
12.基于蜘蛛吐丝飞行的仿生原理,将传统着陆器的刚性连接,转变为柔性承重缆连接。利用海流对柔性承重缆的推动作用,实现了着陆器本体在近底附近的无动力巡航。更进一步地,通过调节压载的重量,可以实现不同深度,甚至全海深的无动力巡航,大幅扩展了着陆器原本只能坐底作业的应用场景,为深海科学研究和探索提供了新的技术思路。
附图说明
13.图1为本发明实施例的基于仿生原理的无动力底层漂流着陆器的第一布放流程时的结构示意图;
14.图2为本发明实施例的基于仿生原理的无动力底层漂流着陆器的第二布放流程时的结构示意图。
具体实施方式
15.下面根据附图图1~图2,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
16.请参阅图1~图2,本发明实施例一的一种基于仿生原理的无动力底层漂流着陆器,包括一浮体1、一着陆器本体2、若干吊挂装置4、一柔性承重缆5和多个压载;浮体1通过吊挂装置4连接着陆器本体2;柔性承重缆5松弛连接于浮体1与着陆器本体2之间;着陆器本体2包括一控制器21以及连接于控制器21的一电池22和多个抛载装置23;抛载装置23连接压载;控制器21还连接吊挂装置4。
17.抛载装置23包括机械式抛载装置、电磁式抛载装置、电化学熔断抛载装置或上电消磁式电磁吸附装置。
18.吊挂装置4包括机械式吊挂装置、电磁式吊挂装置、电化学熔断吊挂装置或上电消磁式电磁吸附装置。
19.控制器21用于控制吊挂装置4和抛载装置23;电池22用于供给能量;抛载装置23用于连接和抛弃压载。吊挂装置4和抛载装置23采用上电消磁式电磁吸附装置最为有利。即失电条件下,利用装置内的永磁铁实现压载吸附功能;上电条件下,装置内的线圈产生与永磁铁相反的磁场,从而抛弃压载物和将着陆器本体2与浮体1分离。
20.压载分为第一压载31和第二压载32两部分,分两批次抛弃,其中第二压载32为第一批次抛弃,第一压载31为第二批次抛弃。
21.浮体1与着陆器本体2同时通过吊挂装置4及柔性承重缆5连接。其中,吊挂装置4具有吊挂和分离功能;柔性承重缆5盘绕在浮体1与着陆器本体2之间,易于展开。
22.着陆器本体2携带第一压载31和第二压载32,可通过控制器21控制抛载装置23,将压载抛弃。内置电池22为控制器21及抛载装置23供电。
23.本发明实施例一的一种基于仿生原理的无动力底层漂流着陆器,其布放过程如下:
24.着陆器本体2与浮体1之间通过吊挂装置4相连,一同吊放入水,利用自身重力沉入海底。如图1所示。此时浮体1与着陆器本体2通过吊挂装置4相连,且着陆器本体2携带着全部压载。
25.着陆器本体2完成坐底观察或采样任务后,通过控制器21发出指令,控制吊挂装置4执行分离动作,如机械式脱钩或电磁式分离等。浮体1在自身浮力作用下,向远离海底一侧浮起,同时拖曳柔性承重缆5,使其张开。
26.控制器21继续发出指令,控制抛载装置23将第二压载32抛弃。此时,着陆器本体2及浮体1组成的系统呈零浮力或弱负浮力状态(视海区流速决定,流速越大,所需负浮力越大)。
27.在底层流作用下,浮体1和柔性承重缆5拉动着陆器本体2在近底附近漂流。其原理类似于蜘蛛向空中吐丝,在风的作用下飞行。着陆器本体2可执行近底动态巡航观察等作业。
28.作业结束后,控制器21发出指令,控制抛载装置23将第一压载31抛弃,着陆器利用自身浮力返回水面。
29.本发明实施例二的一种基于仿生原理的无动力底层漂流着陆器,其结构与实施例一基本相同,其区别在于,在供电充足的条件下,还可转化为有动力形式。着陆器本体2还包括一浮力装置。
30.方式一:浮力装置包括一橡胶囊、一油泵和一供油装置;供油装置通过管道连接橡胶囊,油泵安装于管道上;橡胶囊安装于着陆器本体2。
31.方式二:浮力装置包括若干垂向推进器;垂向推进器安装于着陆器本体2。
32.无论是有动力形式,或无动力形式,在对海区流速、温度、盐度、密度等物理化学指标充分了解的前提下,均可通过调节压载重量,或充油体积,或推进器推力等方式,使系统在各深度层获得零浮力或所需弱负浮力,实现更大深度范围,甚至是全海深的漂流巡航。
33.以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
技术特征:
1.一种基于仿生原理的无动力底层漂流着陆器,其特征在于,包括一浮体(1)、一着陆器本体(2)、若干吊挂装置(4)、一柔性承重缆(5)和多个压载;所述浮体(1)通过所述吊挂装置(4)连接所述着陆器本体(2);所述柔性承重缆(5)松弛连接于所述浮体(1)与所述着陆器本体(2)之间;所述着陆器本体(2)包括一控制器(21)以及连接于所述控制器(21)的一电池(22)和多个抛载装置(23);所述抛载装置(23)连接所述压载;所述控制器(21)还连接所述吊挂装置(4)。2.根据权利要求1所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述抛载装置(23)包括机械式抛载装置、电磁式抛载装置、电化学熔断抛载装置或上电消磁式电磁吸附装置。3.根据权利要求1所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述吊挂装置(4)包括机械式吊挂装置、电磁式吊挂装置、电化学熔断吊挂装置或上电消磁式电磁吸附装置。4.根据权利要求1所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述着陆器本体(2)还包括一浮力装置。5.根据权利要求4所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述浮力装置包括一橡胶囊、一油泵和一供油装置;所述供油装置通过管道连接所述橡胶囊,所述油泵安装于所述管道上;所述橡胶囊安装于所述着陆器本体(2)。6.根据权利要求4所述的基于仿生原理的无动力底层漂流着陆器,其特征在于,所述浮力装置包括若干垂向推进器;所述垂向推进器安装于所述着陆器本体(2)。
技术总结
本发明提供一种基于仿生原理的无动力底层漂流着陆器,包括一浮体、一着陆器本体、若干吊挂装置、一柔性承重缆和多个压载;所述浮体通过所述吊挂装置连接所述着陆器本体;所述柔性承重缆松弛连接于所述浮体与所述着陆器本体之间;所述着陆器本体包括一控制器以及连接于所述控制器的一电池和多个抛载装置;所述抛载装置连接所述压载;所述控制器还连接所述吊挂装置。本发明的一种基于仿生原理的无动力底层漂流着陆器,基于蜘蛛吐丝飞行的仿生原理,将传统着陆器的刚性连接,转变为柔性缆连接;利用海流对柔性缆的推动作用,实现了着陆器在近底附近的无动力巡航。近底附近的无动力巡航。近底附近的无动力巡航。
技术研发人员:罗瑞龙 张锦飞 宋婷婷 王芳 吴瑜 张建 殷宝吉
受保护的技术使用者:江苏科技大学
技术研发日:2023.04.28
技术公布日:2023/8/5
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。