sma和ipmc驱动的智能水下仿生软体机器人
技术领域
1.本发明涉及水下机器人技术领域,尤其涉及sma和ipmc驱动的智能水下仿生软体机器人。
背景技术:
2.水下机器人是一种可携带一定载荷、能在水下通过人为操控或自主巡游完成目标任务的水下复杂机电系统。随着水下机器人技术的发展与成熟,已经在各个水下工作领域得到了广泛的应用,如未知水域探测、水下地形测绘、反水雷战、水下目标检测等。
3.传统的水下机器人多以电机为主构成螺旋桨、喷泵等推动装置,游速快且能携带大重量物体,但以这种方式作为驱动的水下机器人也有着很多缺点,如传动结构复杂、噪声大、体积较大、自重较大及仿生效果差等。
4.随着仿生机器人的出现,这些问题也逐渐得到了解决,基于各种智能材料驱动的仿生软体机器人有着传统水下机器人的没有的优点,如体积较小、重量较轻、无噪声、仿生效果好等,特别是在进行未知水域探测时,无声的仿生机器人更易于融入鱼群并进行自主巡游。
5.由此,我们设计了本发明的一款水下智能仿生软体机器人。
技术实现要素:
6.本发明的目的是提供sma和ipmc驱动的智能水下仿生软体机器人,用于解决现有水下机器人动结构复杂、噪声大、体积较大、自重较大及仿生效果差等技术问题。
7.为了实现上述目的,本发明采用了如下技术方案:sma和ipmc驱动的智能水下仿生软体机器人,包括鱼头、鱼身和鱼尾;所述鱼头固定于所述鱼身的前端,所述鱼身的两侧分别转动连接有一个胸鳍,且所述胸鳍受胸鳍转动装置驱动实现旋转;每个所述胸鳍内所嵌入至少两个ipmc驱动器;所述鱼尾包括若干个尺寸不一的主鱼骨、若干个同型的副鱼骨、flex柔性传感器、大应变sma驱动器、鱼尾膜以及尾鳍;所述主鱼骨和副鱼骨依次交替铰接,所述flex柔性传感器通过方孔安装在靠近鱼身的四根主鱼骨中,所述大应变sma驱动器由单根sma丝来回缠绕成“8”字形,安装在主鱼骨和副鱼骨两侧。
8.进一步地,所述鱼身的壳体部分采用pla材料3d打印制成,通过硅胶粘合剂进行密封粘连。
9.进一步地,所述胸鳍转动装置受sma弹簧驱动进行转动;所述胸鳍转动装置包括转动端盖,所述转动端盖与鱼身通过限位卡槽进行装配并用硅胶进行粘连固定,所述胸鳍转动装置还包括主转动体,所述主转动体的一端通过转轴与所述胸鳍固定连接,所述转轴贯穿过鱼身壳体并与所述鱼身转动连接,所述主转动体内
部设置有两个弧形滑槽,两个弧形滑槽内部分别装配所述sma弹簧;所述转动端盖的一侧固定有两个固定块,且所述固定块分别位于两个滑槽内部,所述sma弹簧的一端与滑槽端壁固定,另一端与固定块固定。
10.进一步地,所述胸鳍部分将ipmc驱动器内嵌后通过浇筑成型;所述胸鳍采用ecflex-0030硅胶制成,硬度为15度。
11.进一步地,所述鱼身的两侧还均安装有仿生电极,所述仿生电极包括有发射电极和接收电极,发射电极的正负极分布在鱼身同侧,接收电极位于鱼身的另一侧。
12.进一步地,所述主鱼骨、副鱼骨和尾鳍采用pla材料通过3d打印直接打印而成。
13.进一步地,所述主鱼骨与副鱼骨通过扇形孔与半圆销柱进行铰接连接,端部通过垫片和销钉限位,扇形孔单侧的扫掠角为8
°
。
14.进一步地,所述鱼尾膜外形为类波纹管结构,采用ecflex-0030硅胶制成,硬度为20度,通过硅胶与鱼身和尾鳍进行粘接。
15.进一步地,所述主鱼骨两侧还设置有四根销柱,分别贯穿过所述sma驱动器,将其分为三段。
16.本发明至少具备以下有益效果:本发明通过以仿鱼的形态为设计要点,设计了本仿生软体机器人,本机器人通过设置的鱼尾、胸鳍,并并通过sma驱动器和ipmc驱动器进行驱动,可以实现鱼尾和胸鳍的摆动,并结合胸鳍转动装置对胸鳍的角度转动,在其配合作用下,可以有效实现机器人的直线游动、左、右转弯、上浮下潜等动作,且本机器人体积较小、重量较轻、无噪声、仿生效果好,可以在进行未知水域探测时,更易于融入鱼群并进行自主巡游。
附图说明
17.为了更清楚地说明本发明实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
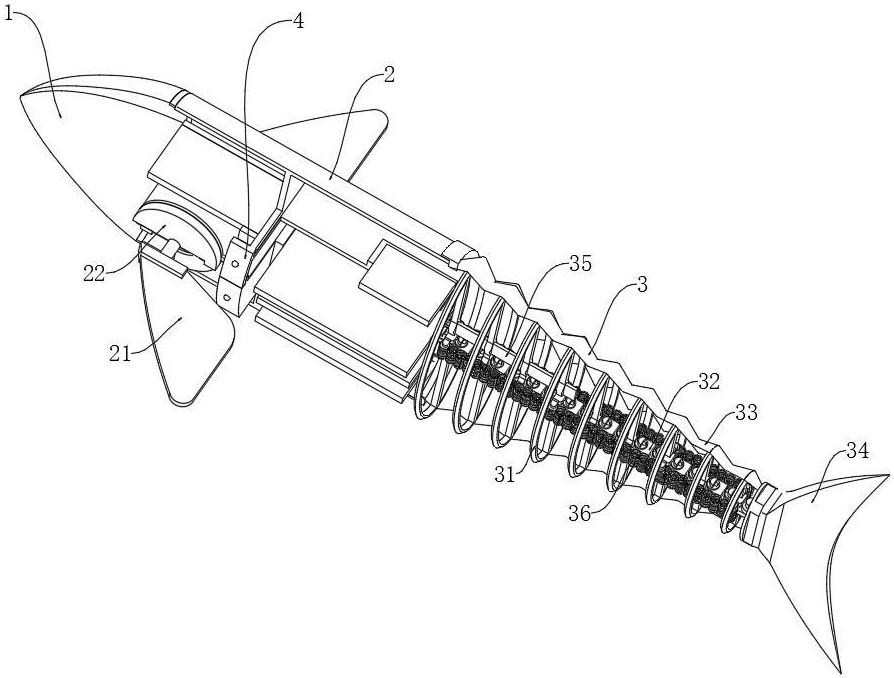
18.图1为本发明整体结构示意图;图2为sma弹簧伸缩的示意图;图3为胸鳍的示意图;图4为胸鳍转动装置的示意图1;图5为胸鳍转动装置的示意图2;图6为仿生电极分布示意图;图7为鱼尾示意图;图8为主鱼骨与副鱼骨连接示意图;图9为鱼尾摆动示意图;图10为大应变sma驱动器的示意图;图11为直线游动示意图;图12为左、右转弯示意图;图13为上浮下潜示意图;图14为ipmc驱动器原理图。
19.图中:1、鱼头;2、鱼身;21、胸鳍;22、胸鳍转动装置;221、转动端盖;222、主转动体;223、固定块;4、仿生电极;3、鱼尾;31、主鱼骨;311、销柱;32、副鱼骨;33、鱼尾膜;34、尾鳍;35、flex柔性传感器;36、大应变sma驱动器。
实施方式
20.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例
21.本发明的智能水下仿生软体机器人主要模仿鱼类bcf式推动方法(利用鱼体主干及尾鳍的摆动从而实现鱼体游动)和mpf式推动方法(利用鱼体前侧对鳍及胸鳍摆动实现向前游动),结合水下仿生电场感知技术,可使机器人在黑暗且浑浊的水域进行近距离的探测感知,提高了机器人的智能化。
22.具体的,请参阅图1,本发明的智能水下仿生软体机器人,其从前端到后端依次设置有鱼头1、鱼身2和鱼尾3三个部分。
23.所述鱼身2的壳体部分采用pla材料3d打印制成,通过硅胶粘合剂进行密封粘连,以提高整体结构的防水性和柔韧性;所述鱼头1固定于所述鱼身2的前端,所述鱼身2的两侧分别转动连接有一个胸鳍21,且所述胸鳍21受胸鳍转动装置22驱动实现旋转。
24.在一具体实施例中,所述胸鳍转动装置22受sma弹簧驱动产生进行转动。其中,sma丝在常温下柔软度高,可制成任何形状,在人为制造形状记忆节点并受到外力发生形变后,可在70℃左右的温度下提升硬度并恢复原长,驱动原理如图2所示。如图3,所述转动装置22的弧形腔体内,各装有用于胸鳍转动的sma弹簧,可记为sma-1和sma-2。
25.具体装配方案如图4和图5所示。所述转动装置22包括转动端盖221,所述转动端盖221与鱼身2通过限位卡槽进行装配并用硅胶进行粘连固定,所述转动装置22还包括主转动体222,所述主转动体222的一端通过转轴与所述胸鳍21固定连接,所述转轴贯穿过鱼身2壳体并与所述鱼身2转动连接,所述主转动体222内部设置有两个弧形滑槽,两个弧形滑槽内部分别装配所述sma-1和sma-2;所述转动端盖221的一侧固定有两个固定块223,且所述固定块223分别位于两个滑槽内部,所述sma-1和sma-2的一端与滑槽端壁固定,另一端与固定块223固定。
26.具体的,当对sma-1和sma-2施电或断电时,可以调节胸鳍21的不同角度,举例如下:在初始状态,sma-1和sma-2均断电,此时,sma-1和sma-2均处于原长,胸鳍21处于平行于鱼身2的角度;当对sma-2通电,其变热收缩,同时带动sma-1伸长并使得胸鳍21沿实线箭头方向旋转;反之,再对sma-1通电,其变热收缩,同时带动sma-2伸长并使得胸鳍21沿虚线旋转,如图5所示。
27.所述胸鳍21部分将ipmc驱动器内嵌后通过浇筑成型,因为ipmc驱动力较小,所述胸鳍21采用ecflex-0030硅胶制成硬度为15度,以保证胸鳍摆动的正常执行。上述的ipmc材
料在受到电刺激后,会在阴极附近膨胀而在阳极附近收缩,使得ipmc向阳极进行弯曲,施加反向电压后实现反向弯曲,达到摆动驱动的效果,驱动原理如图14所示。参阅如图4,胸鳍21内所嵌入至少两个ipmc驱动器,可以记为ipmc-1和ipmc-2,在每个ipmc驱动器靠近鱼身端通过金属电极与控制模块连接,通电后,在控制模块的作用下,模仿鱼鳍垂直于鱼鳍表面上下拍打。
28.在所述鱼身2的两侧还均安装有仿生电极4,且包括有发射电极和接收电极;进而可以产生仿生电场,并通过接收电极构建仿生电场感知,通过对微弱电场变化的感知获得周围环境的信息,帮助本机器人进行定位、通信及自主巡游等。四个电极的分布位置如图6所示。发射电极的正负极分布在同侧,接收电极1、2位于同侧。
29.参阅图7,所述鱼尾3由9节尺寸不一的主鱼骨31、8节同型的副鱼骨32、一个flex柔性传感器35、一对大应变sma驱动器36、鱼尾膜33以及尾鳍34构成;所述主鱼骨31、副鱼骨32和尾鳍34采用pla材料通过3d打印直接打印而成,其中其中主鱼骨31、副鱼骨32在连接后支撑整个尾部外形,同时与尾鳍34连接用于产生推动力,各部分在进行连接后,除了铰接的主鱼骨31、副鱼骨32,其余均采用硅胶进行粘连紧固。
30.所述主鱼骨31和副鱼骨32依次交替铰接,如图8所示。具体为通过扇形孔与半圆销柱进行铰接,半圆柱销端部通过垫片和销钉限位;扇形孔单侧的扫掠角为8
°
,该设计使得主、副鱼骨间的相对转动仅限于
±8°
;靠近尾鳍34的主鱼骨31则通过半圆孔和半圆销柱进行铰接,靠近鱼身2的主鱼骨31以同样的方法进行铰接;该设计目的可使得鱼尾在摆动时最大的扫掠角为256
°
,如图9所示。
31.所述鱼尾3外层部分是智能仿生软体机器人的鱼尾膜,其外形类似波纹管结构,采用ecflex-0030硅胶制成,硬度为20度,通过硅胶与鱼身2和尾鳍进行粘接,能很好的贴合鱼骨以及保证尾部驱动的柔韧性;在鱼尾受力摆动时,波纹管状的鱼尾膜能很好的随之在一侧压缩折叠或者拉伸展开。
32.flex柔性传感器35通过方孔安装在靠近鱼身的四根主鱼骨31中。这是一款电阻式柔性薄膜压力传感器,能在发生弯曲变形时产生电阻变化,再将变化转换为相应的电信号变化反馈给控制系统,控制系统对信号进行分析后判断鱼尾所处的弯曲状态,对鱼尾位姿进行预判。
33.所述大应变sma驱动器36由单根sma丝来回缠绕成“8”字形,并由固定在主鱼骨31两侧的四根销柱(311)分为三段,再安装在主鱼骨31和副鱼骨32两侧,如图7放大部分所示,增加销柱311的设计主要是防止大应变sma驱动器36在伸长和压缩过程中移位。
34.该设计使得该驱动器具有38%的应变能力并能产生较大的驱动力,满足机器人在水下游动时的尾部驱动需求。大应变sma驱动器36被分为三段,取靠近鱼身的第一段进行驱动原理分析,如图10所示.具体的,本机器人的游动以及转弯、上浮下潜、加速、急停和自主巡游方式如下:直线游动机器人依靠鱼尾3的左右摆动完成直线游动,大应变sma驱动器36采用轮询加热法进行控制,即两侧的大应变sma驱动器36不同时序进行通电加热,如在左侧的大应变sma驱动器36达到相变温度并冷却一段时间后,右侧的大应变sma驱动器36才进行通电加热,以此循环,达到鱼尾3左右摆动的效果,结合flex柔性传感器,当传感器随着鱼尾弯曲变形而产
生电阻时,根据其反馈的电信号控制sma驱动器的通电加热时间,从而在最大转动角度内实现对鱼尾摆动角度的控制;如图11所示。
35.左、右转弯机器人在执行左右转弯时依靠胸鳍21和鱼尾3的配合可实现快速转弯的动作。以左转弯为例:控制集成部分在接收到左转弯的命令时,先停止尾部驱动的摆动,根据flex柔性传感器的电信号,判断鱼尾是否回到初始状态,待其回到初始状态,右侧胸鳍转动装置驱使胸鳍转动90
°
后,胸鳍21内嵌的ipmc驱动器记为ipmc-3和ipmc-4再通电进行摆动进而带动胸鳍拍动,而左侧胸鳍保持初始位置不变;在胸鳍摆动时,尾鳍在特定加热时序命令下向左侧频繁摆动;待完成转弯命令时,右侧胸鳍转动装置再驱动右胸鳍转回到初始状态;具体过程如图12所示。
36.上浮下潜机器人的上浮下潜主要与胸鳍的摆动有关,接收到上浮命令时,两侧胸鳍中的四块ipmc同时通电,驱动电信号为1/4周期的正弦交流电压,夹持电极上面为阳极,下面为阴极,则胸鳍朝上进行弯曲,待达到预期位姿后,转换为正常的正弦电压。机器人的下潜原理同上,只是初始状态为胸鳍的下面为阳极而上面为阴极,即调整电压的正负极。在实现摆动时,鱼尾驱动器可同时执行直线巡游的通电时序,从而达到快速上浮或快速下潜的动作;如图13所示。
37.加速、急停当机器人需要加速游动时,鱼尾驱动的轮询加热转换频率加快,则鱼尾的左右摆动频率加快,使得尾鳍仅在小角度内进行摆动;当机器人需要减速或者急停时,鱼尾驱动的轮询加热转换时间延长,同时胸鳍转动90度,并朝着机器人前进的方向进行弯曲摆动,产生与前进方向相反的反向推力,直至达到预期游速。
38.自主巡游机器人的自主巡游依靠仿生电场感知装置,在机器人接收到自主巡游命令时,通过感知周围环境对自身仿生电场的变化,达到引导驱动的目的,如:给机器人设置以下命令,在感知到距离最近的某个游动的电场发生变化时,则以正常速度向其靠近;运动执行状态为,当机器人在水下感知通过仿生电场感知装置感知到对应的电场变化时,先进行转向对其目标,再以尾鳍驱动靠近目标,若需要上浮下潜等命令时,再通过预定程序进行控制。
39.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
