1.本公开涉及一种多关节型机器人。
背景技术:
2.以往,已知一种scara机器人,该scara机器人在设置于地面的基座的后方配置中空的支柱,在被支撑为能够绕竖直的轴线相对于基座旋转的臂上,经由支柱的内部布线有电缆(例如,参考专利文献1以及专利文献2。)。
3.在这些scara机器人中,限位器由螺栓头部和橡胶制的弹性部构成,该限位器用于限制臂的旋转角度,其中,所述螺栓头部紧固在臂的下表面,所述弹性部固定在基座的侧面。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2018-140456号公报
7.专利文献2:日本特开2015-85393号公报
技术实现要素:
8.发明要解决的问题
9.在可搬运重量大的scara机器人的情况下,利用螺栓头部的限位器不能充分吸收动能。另外,设置能够吸收大动能的大型限位器的空间有限,有时会将臂的旋转角度范围限制得更窄。
10.因此,期望一种具备在保证臂的旋转角度范围更广的同时能够吸收大动能的限位器的多关节型机器人。
11.用于解决问题的方案
12.本公开的一方面是一种多关节型机器人,该多关节型机器人具备:基座;臂,其被支撑为能够相对于该基座在小于
±
180
°
的旋转角度范围内绕规定的轴线旋转;以及中空的支柱,其在该臂的所述旋转角度范围外,从所述基座与所述轴线平行地立起,经由该支柱的内部从所述基座向所述臂布线有线条体,所述多关节型机器人具备限位器,该限位器被嵌入在所述支柱的侧面,抵接超过所述旋转角度范围旋转的所述臂的侧面。
附图说明
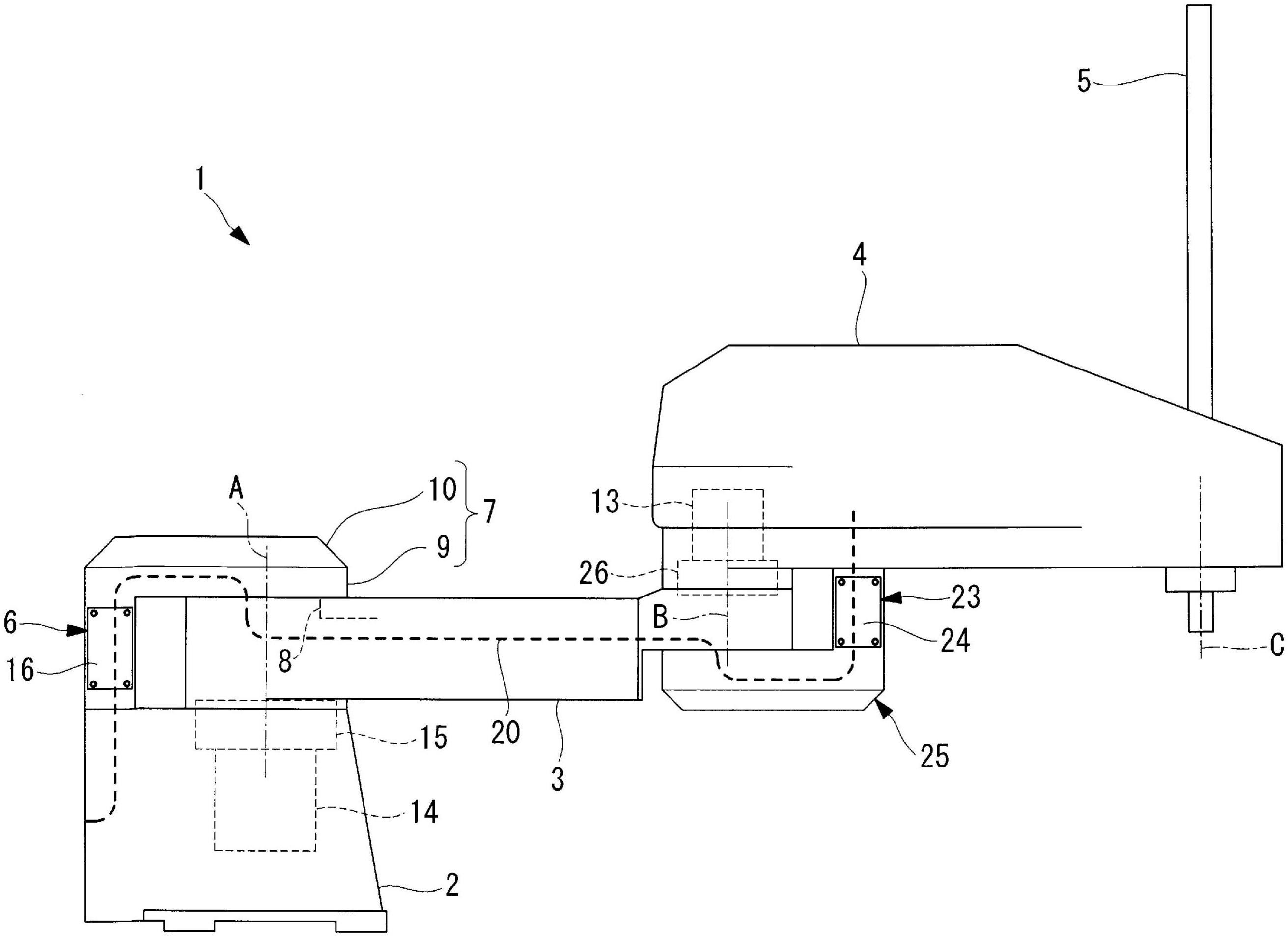
13.图1是示出根据本公开的一个实施方式的机器人的侧视图。
14.图2是示出图1的机器人的第一臂的旋转角度范围与线条体布线用的支柱的位置关系的俯视图。
15.图3是说明向图1的机器人的支柱内安装线条体的局部纵剖视图。
16.图4是示出将图3的线条体固定在支柱内的状态的局部纵剖视图。
17.图5是说明图1的机器人的支柱和组装在支柱上的限位器的局部立体图。
18.图6是示出图1的机器人的支柱的凹部和组装在凹部的限位器以及垫片的纵剖视图。
19.图7是说明与图1的机器人的限位器的关系的限位器的侧视图以及第一臂的局部横剖视图。
20.图8是示出图1的机器人的限位器的变形例的立体图。
21.图9是说明图8的限位器与第一臂的关系的限位器的侧视图以及第一臂的局部横剖视图。
具体实施方式
22.下面参照附图对根据本公开的一个实施方式的机器人1进行说明。
23.如图1所示,根据本实施方式的机器人1例如为scara机器人。此外,本公开的结构并不限定于scara机器人,可以适用于其他任意的轴结构的多关节型机器人。
24.本实施方式的机器人1具备基座2、第一臂(臂)3和第二臂4,所述基座2设置在地面上,所述第一臂3被支撑为能够绕竖直的第一轴线a相对于基座2旋转,所述第二臂4被支撑为能够绕平行于第一轴线a的第二轴线b旋转。在第二臂4的前端设置有例如滚珠丝杠花键轴5,该滚珠丝杠花键轴5被驱动在沿竖直的第三轴线c的方向上上下移动,并绕第三轴线c旋转。
25.第一臂3被安装在基座2的上表面。如图2实线所示,第一臂3被支撑为能够相对于基座2从向前延伸的原点位置,绕第一轴线a在小于
±
180
°
,例如,
±
140
°
的旋转角度范围内旋转。
26.在基座2上,向第一臂3的后方远离的位置,即图2中用点划线所示的第一臂3的旋转角度范围外的位置,设置有沿第一轴线a在竖直方向上从基座2的上表面立起的支柱6。
27.支柱6一体地设置在基座2上,在支柱6的上部设有架设在支柱6和第一臂3之间的连接部7。
28.基座2、支柱6、连接部7以及第一臂3具有中空结构。另外,第一臂3的上表面上,在第一轴线a附近设置有将连接部7的内部空间和第一臂3的内部空间相连通的中空孔8。
29.连接部7具备连接构件9和盖构件10,其中,所述连接构件9用于将支柱6的上部和第一臂3的上表面连接,所述盖构件10利用螺栓可装卸地安装在连接构件9的上部。通过将盖构件10从连接构件9上拆下,使支柱6的内部空间以及第一臂3的中空孔8向上方露出,从而能够方便进行后面描述的线条体20的设置作业。
30.将线条体20从设置在基座2背面的布线板,经由基座2的内部、支柱6的内部以及连接部7的内部,从中空孔8引入第一臂3内。线条体20包含用于驱动第二臂4以及滚珠丝杠花键轴5的电缆、以及用于驱动安装在滚珠丝杠花键轴5上的工具的电缆或者空气管等。
31.为了在机器人1上设置线条体20,首先,以盖构件10从连接构件9被拆下的状态,使支柱6的内部空间以及第一臂3的中空孔8露出。在该状态下,经由支柱6的内部空间从基座2侧拉出线条体20,如图3所示,利用尼龙带等的捆扎件12将线条体20捆扎在l字形的安装配件11上。然后,将捆扎状态的线条体20和安装配件11一起返回到支柱6的内部空间内,如图4所示,将安装配件11固定在连接构件9上。
32.由此,能够容易地将线条体20固定在机器人1上。此外,对于线条体20的前端侧部
分,从露出的第一臂3的中空孔8插入到第一臂3内,并连接到配置在更前端侧的第二臂4用的马达13等上,能够更容易设置。
33.相对于基座2驱动第一臂3的马达14以及减速器15配置在基座2内,在第一轴线a上从第一臂3的下方固定在第一臂3以及基座2上。
34.根据本实施方式的机器人1,如图5所示,在支柱6的侧面具备限位器16。支柱6形成为圆柱形,在绕第一轴线a的周向的两侧分别具备将外周面的一部分切掉的形态的凹部6a。各凹部6a的底面分别由与第一轴线a大致平行的平面构成。在各凹部6a的底面设有开口部17和多个螺孔18,所述开口部17与支柱6的内部空间相连通,多个螺孔18形成在开口部17的周围。
35.各限位器16具有与各凹部6a互补的形状,在嵌入到各凹部6a的状态下填充各凹部6a,具有由作为支柱6的外周面的圆柱面的一部分的圆弧面形成的外表面,由壁厚比支柱6薄的金属材料构成。各限位器16通过嵌入在支柱6的各凹部6a,封闭各凹部6a的开口部17,利用紧固在螺孔18的多个螺栓19,可装卸地安装在支柱6上。
36.如图5以及图6所示,在各限位器16和各凸部6a的底面之间夹着垫片(密封构件)21。在夹着垫片21的状态下,通过将各限位器16固定在各凹部6a,各凹部6a的开口部17被密封,能够防止液体或者灰尘从外部进入到支柱6内。
37.各限位器16在沿着第一轴线a的方向的中央位置,在与第一臂3的侧面的沿着第一轴线a的方向的中央一致的位置,埋入到支柱6的各凹部6a中。
38.如图7的横截面所示,第一臂3的两个侧面在第一臂3的长度方向的全长上,具有在沿着第一轴线a的方向的中央具备向最外侧突出的棱线22的凸出形状。凸出形状例如由以174
°‑
176
°
的角度交叉的2个平面构成。
39.第一臂3的两个侧面的凸出形状由用铸件构成第一臂3时的脱模斜度构成。
40.以下说明如此构成的本实施方式的机器人1的作用。
41.根据本实施方式的机器人1,如图2所示,在一般的工作状态下,第一臂3在
±
140
°
的旋转角度范围内进行工作,第一臂3的侧面不会与支柱6的限位器16接触。
42.然而,在由于某种原因而丢失校准等情况下,第一臂3会超过一般的旋转角度范围工作,其结果,认为第一臂3的某一个侧面会与埋入在支柱6中的限位器16接触。
43.在这种情况下,第一臂3的凸出形状的侧面在最突出的棱线22位置与限位器16接触并使其变形。并且,在到第一臂3停止为止的期间,第一臂3的侧面逐渐向限位器16的外表面里嵌入。
44.也就是说,第一臂3的动能通过使限位器16变形而被吸收。在该情况下,根据本实施方式的机器人1,在第一臂3停止之前,第一臂3的侧面与限位器16的外表面在大范围内接触。因此,具有即使在机器人1的可搬运重量大或工作速度快的情况下,也能够充分吸收第一臂3的动能,更可靠地使其停止的优点。
45.另外,根据本实施方式的机器人1,由于将限位器16组装在用于布线线条体20的支柱6上,所以不需要在支柱6的外侧设置用于设置限位器16的空间,并且能够将第一臂3的旋转角度范围的限制抑制到最小化。
46.另外,由于将限位器16利用螺栓19可装卸地安装在支柱6的凹部6a,因此能够容易更换变形的限位器16。
47.另外,通过从支柱6的凹部6a拆下限位器16,能够打开设置在凹部6a的底面上的开口部17。由此,具有如下优点:能够利用打开的开口部17容易地进行从基座2经由支柱6的内部空间向支柱6的上方将线条体20取出的作业以及线条体20的布线作业。
48.另外,根据本实施方式的机器人1,具有如下优点:通过将限位器16埋入在支柱6的凹部6a来构成支柱6的外周面和限位器16的外表面光滑地连接的单个的圆柱面,因此,在限位器16的上部,不会形成积存液体或灰尘的台阶部。由此,能够减少在台阶部积存的液体或灰尘附着在所处理的工件上等问题的发生。尤其对于工件是食品的情况下是有效的。
49.另外,在本实施方式中,由于是在第一臂3的后方经由立起的支柱6,从第一臂3的上表面侧向第一臂3内布线线条体20,因此不需要将第一臂3下方的减速器15等设为中空结构。由此,能够防止基座2的大型化以及成本的增加。
50.此外,在本实施方式中,利用由铸件构成第一臂3时的脱模斜度所形成的侧面的凸出形状,将限位器16的外周表面形成为平坦的形状。作为代替,如图8及图9所示,也可以将第一臂3的侧面作为平坦的形状,将限位器16的外表面作为在中央向最外侧突出的凸出形状。
51.在该情况下,如图8所示,优选为通过使被埋入在凹部6a的状态的限位器16的上边缘形成为与支柱6的外周面一致的形状,从而在上端不产生台阶,防止灰尘或液体积存。
52.另外,在本实施方式中,由金属材料形成限位器16,但金属材料也可以采用任意种类的材料。另外,也可以使用塑料或橡胶等树脂材料代替金属材料。
53.另外,通过使第一臂3接触而引起的限位器16的变形来吸收第一臂3的动能,但除此之外,也可以通过检测第一臂3与限位器16接触的冲击而对马达施加制动,从而降低动能。
54.另外,在本实施方式中,将支柱6形成为圆柱形,但也可以取而代之,形成为其他任意的柱形。
55.另外,在凹部6a的底面设置开口部17,但也可以没有开口部17。通过取消开口部17,能够利用凹部6a的整个底面支撑限位器16,适用于使用由刚性低的弹性材料等构成的限位器16的情况。
56.另外,在本实施方式中,虽然示出了用于使相对于基座2绕第一轴线a旋转的第一臂3停止的限位器16,但对于用于使第二臂4相对于第一臂3停止的限位器24也可以采用同样的结构。
57.即,如图1所示,从第二臂4的下表面向下与第二轴线b平行地立起中空的支柱23,利用中空的连接部25连接支柱23的端面和第一臂3的下表面。在支柱6的两侧面上,分别组装有在第二臂4相对于第一臂3旋转超过旋转角度范围时,抵接第一臂3侧面的限位器24即可。
58.如图1中虚线所示,通过了第一臂3内的线条体20,经由连接部25及支柱23的内部空间与配置在第二臂4内的第二臂4用的马达13或滚珠丝杠花键轴用的马达连接。图中,附图标记26是减速器。
59.附图标记说明:
60.1机器人(多关节型机器人)
61.2基座
62.3第一臂(臂)
63.6支柱
64.16限位器
65.17开口部
66.20线条体
67.21垫片(密封构件)
68.a第一轴线(轴线)
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。