技术特征:
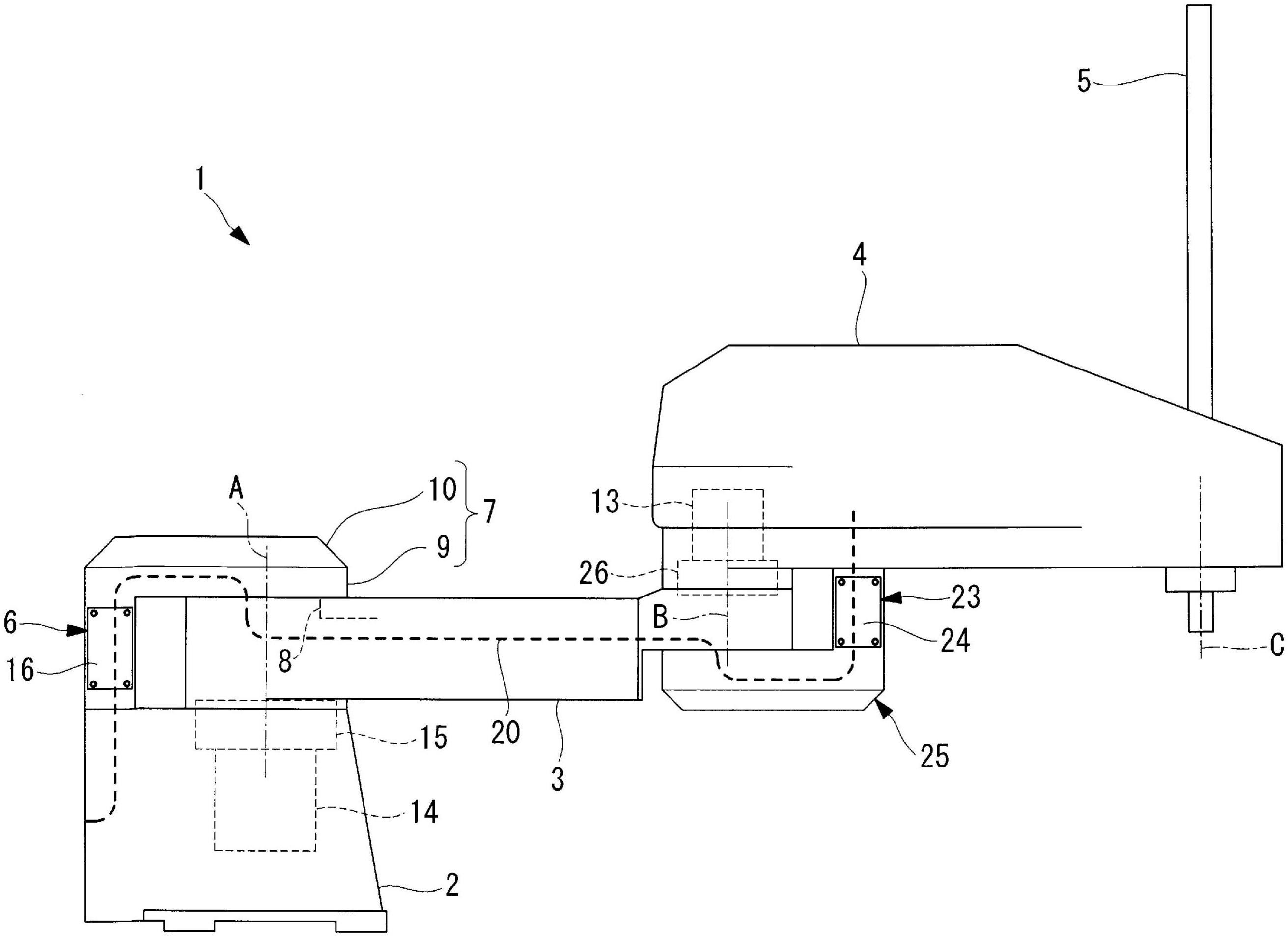
1.一种多关节型机器人,其特征在于,具备:基座;臂,其被支撑为能够相对于该基座在小于
±
180
°
的旋转角度范围内绕规定的轴线旋转;以及中空的支柱,其在该臂的所述旋转角度范围外,从所述基座与所述轴线平行地立起;经由该支柱的内部从所述基座向所述臂布线有线条体,上述多关节型机器人具备限位器,所述限位器被埋入在所述支柱的侧面,抵接超过所述旋转角度范围旋转的所述臂的侧面。2.根据权利要求1所述的多关节型机器人,其特征在于,所述限位器可装卸地安装在所述支柱的所述侧面上。3.根据权利要求2所述的多关节型机器人,其特征在于,在所述支柱的所述侧面上设有贯通该支柱的内部空间的开口部,所述限位器安装在将所述开口部封闭的位置。4.根据权利要求3所述的多关节型机器人,其特征在于,所述多关节型机器人具备密封构件,该密封构件被夹在所述限位器与所述支柱之间,将所述开口部全周密封。5.根据权利要求1-4中任一项所述的多关节型机器人,其特征在于,所述臂的侧面或所述限位器的表面中的一个具有在沿着所述轴线的方向的中途位置向外侧突出的凸出形状,另一个具有在沿所述轴线的方向上没有凹凸的平坦形状。
技术总结
一种多关节型机器人(1),该多关节型机器人(1)具备:基座(2);臂(3),其被支撑为能够相对于基座(2)在小于
技术研发人员:小西伯弥
受保护的技术使用者:发那科株式会社
技术研发日:2021.11.15
技术公布日:2023/7/20
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。