1.本实用新型涉及机械臂技术领域,尤其涉及到一种机械关节、机械臂和自移动清洁设备。
背景技术:
2.随着科学技术的不断发展和人们生活水平的不断提高,自移动清洁设备,如智能扫地机器人已经不断地走入到我们的日常生活中。目前的自移动清洁设备,为了更好的实现清扫功能,会增设机械臂以实现障碍物或垃圾的抓取或移动。
3.其中,机械臂中通常需要设置有机械关节以实现第二臂相对于第一臂的抬升降落操作,以使相邻的两个臂处于折叠状态或展开状态。
技术实现要素:
4.在实用新型内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型的此部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
5.本实用新型第一方面的实施例,提供了一种机械关节,用于连接机械臂中的第一臂和第二臂,机械关节包括:电机,电机包括第一输出轴、电机基板、定子、转子、电机罩,电机罩与电机基板连接并合围成容纳定子、转子的电机安装腔,转子位于定子的外部,第一输出轴穿设于电机基板,定子与电机基板连接并位于第一输出轴的周侧;行星减速机构,位于电机安装腔的外部,行星减速机构包括一级齿轮组和输出端,一级齿轮组与第一输出轴连接,并与电机基板邻近设置,输出端用于驱动第二臂相对于第一臂转动。
6.进一步地,电机基板远离一级齿轮组的一侧设置有环状凸台,第一输出轴穿设于环状凸台并与环状凸台转动连接,第一输出轴与环状凸台同轴设置,定子分布在环状凸台的周侧。
7.进一步地,行星减速机构还包括:二级齿轮组、内齿圈和输出端盖,输出端盖与第一臂连接,内齿圈的两端分别与电机基板、输出端盖连接并合围成减速安装腔;一级齿轮组位于减速安装腔内,并包括第一太阳轮、第一行星轮和第一行星架,第一太阳轮固定在第一输出轴上,二级齿轮组与输出端盖邻近设置,并包括位于减速安装腔内第二太阳轮、第二行星轮和第二行星架,第一行星轮和第二行星轮均与内齿圈啮合,第二太阳轮固定在第一行星架上,第二行星架包括穿设于输出端盖的第二输出轴,第二输出轴作为输出端与第二臂连接。
8.进一步地,内齿圈与输出端盖为一体式结构。
9.进一步地,第一臂上设置有定位结构;输出端盖远离电机基板的一侧设置有限位结构,限位结构与定位结构配合,以对输出端盖相对于第一臂的转动进行限位。
10.进一步地,机械关节还包括:第一轴承,套设在第二输出轴的外部,输出端盖通过第一轴承与第二输出轴转动连接;
11.法兰轴承,第一臂包括相对设置的第一连接臂和第二连接臂,第一连接臂上设置有定位结构,法兰轴承与第二连接臂连接,第二输出轴通过法兰轴承与第二连接臂转动连接;第一连接件,第二输出轴位于减速安装腔外部的端部设置有连接孔,第一连接件适于与连接孔连接;第一预紧垫片,沿第二输出轴的轴向,预紧垫片夹设在第一连接件和第二输出轴之间,且第一预紧垫片朝向第二输出轴的一侧能够与法兰轴承抵接。
12.进一步地,第一连接件包括第一头部和第一杆部,第一杆部与连接孔连接,沿第二输出轴的轴向,预紧垫片位于第一头部和第二输出轴的端部之间;其中,在平行于第二输出轴径向的平面内,第一预紧垫片的投影与第二输出轴的投影有重合,第一预紧垫片的投影与法兰轴承的投影有重合。
13.进一步地,机械关节还包括:抱箍,第二输出轴位于减速安装腔外部的端部的周侧设置有第一限位面和第二限位面,第一限位面用于与抱箍接触,第二限位面用于与第二臂接触,第二臂位于第一连接臂和第二连接臂之间;第二连接件,抱箍和第二臂通过第二连接件连接。
14.进一步地,第一限位面和第二限位面相对设置,且均为平面结构。
15.本实用新型第二方面的实施例,提供了一种机械臂,包括:第一方面中任一项的机械关节。
16.本实用新型第三方面的实施例,提供了一种自移动清洁设备,包括:第二方面的机械臂。
17.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
附图说明
18.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。而且在整个附图中,用相同的参考符号表示相同的部件。其中:
19.图1示出了本实用新型实施例提供的自移动清洁设备的机械臂展开状态下的结构示意图;
20.图2示出了本实用新型实施例提供的自移动清洁设备的机械臂折叠状态下的结构示意图;
21.图3示出了本实用新型实施例提供的自移动清洁设备的另一个视角的结构示意图;
22.图4示出了本实用新型实施例提供的机械臂的展开状态下的一个视角结构示意图;
23.图5示出了本实用新型实施例提供的机械臂的展开状态下的另一个视角结构示意图;
24.图6示出了本实用新型实施例提供的机械臂的折叠状态下的一个视角结构示意图;
25.图7示出了本实用新型实施例提供的机械臂的折叠状态下的另一个视角结构示意
图;
26.图8示出了本实用新型实施例提供的机械臂的展开状态下的一个机械结构简图;
27.图9示出了本实用新型实施例提供的机械臂的折叠状态下的又一个视角结构示意图;
28.图10示出了图9所示实施例的一个视角的结构示意图;
29.图11示出了图10所示实施例的a-a的剖视图;
30.图12示出了本实用新型实施例提供的第一机械关节与底座、旋转座装配下的剖视图;
31.图13示出了本实用新型实施例提供的第二机械关节与旋转座、支撑臂装配下的结构示意图;
32.图14示出了本实用新型实施例提供的第二机械关节一个视角的部分结构示意图;
33.图15示出了图14所示实施例的b-b的剖视图;
34.图16示出了本实用新型实施例提供的机械臂的展开状态下的又一个视角的结构示意图;
35.图17示出了图16所示实施例的c-c的剖视图;
36.图18示出了图17所示实施例的a处的局部放大示意图;
37.图19示出了本实用新型实施例提供的第三机械关节的剖视图;
38.图20示出了本实用新型实施例提供的第三机械关节的一个视角的结构示意图;
39.图21示出了本实用新型实施例提供的第三机械关节与支撑臂、连接臂装配下的剖视图;
40.图22示出了本实用新型实施例提供的第三机械关节与支撑臂、连接臂装配下的部分结构示意图;
41.图23示出了本实用新型实施例提供的第四机械关节与工作臂、机械手装配下的一个视角的结构示意图;
42.图24示出了图23所示实施例的d-d的一个视角的部分剖视图;
43.图25示出了本实用新型实施例提供的机械臂的展开状态下的再一个视角的结构示意图;
44.图26示出了图25所示实施例的b处的局部放大示意图;
45.图27示出了本实用新型实施例提供的机械手的一个视角的结构示意图;
46.图28示出了本实用新型实施例提供的机械手的另一个视角的结构示意图;
47.图29示出了本实用新型实施例提供的机械手的又一个视角的结构示意图;
48.图30示出了本实用新型实施例提供的机械手的再一个视角的结构示意图;
49.图31示出了图29所示实施例的一个视角的局部放大示意图;
50.图32示出了图29所示实施例的另一个视角的局部放大示意图;
51.图33示出了图30所示实施例的另一个视角的局部放大示意图;
52.图34示出了图33所示实施例的爆炸示意图;
53.图35示出了本实用新型实施例提供的自移动清洁设备的示意图框图;
54.图36示出了本实用新型另一个实施例提供的机械手的一个视角的结构示意图;
55.图37示出了图36所示实施例的部分结构示意图;
56.图38示出了本实用新型另一个实施例提供的机械手的另一个视角的结构示意图;
57.图39示出了本实用新型另一个实施例提供的机械手的又一个视角的结构示意图;
58.图40示出了本实用新型另一个实施例提供的机械手的再一个视角的结构示意图;
59.图41示出了本实用新型另一个实施例提供的机械手的再又一个视角的结构示意图;
60.图42示出了图41所示实施例的部分结构示意图。
61.附图标记说明
62.001机械臂;
63.10第一机械关节,110第一驱动部,120旋转关节,121滚动组件,1211第一滚动组件,1212第二滚动组件,122第一垫片,123预紧组件,1231第一调节件,1232第二预紧垫片,124滑动套,130第一同步带轮组件,131第一传动带,132第一同步轮,133第二同步轮,140第一转角检测装置,141磁感应件,142磁性件,150第二同步带轮组件,151第二同步带,160张紧装置,161导向部,162张紧轴承,163调节孔,170检测轴,180固定架;
64.20第二机械关节,210第一导向螺母,220第二驱动部,230第一螺杆,231阶梯结构,232防拉槽,240电机座,250推力轴承,260弹性件,280防拉件,290限位开关,291开关本体,292触发件;
65.30第三机械关节,310电机,311第一输出轴,312电机基板,313定子,314转子,315电机罩,316霍尔板,317电机安装腔,320行星减速机构,321一级齿轮组,3211第一太阳轮,3212第一行星轮,3213第一行星架,322二级齿轮组,3221第二太阳轮,3222第二行星轮,3223第二行星架,324减速安装腔,325内齿圈,326输出端盖,3261限位结构,327第二输出轴,3271连接孔,3272第一限位面,330第一轴承,340法兰轴承,350第一连接件,351第一头部,352第一杆部,360第一预紧垫片,370抱箍,380第二连接件;
66.40第四机械关节,410第四驱动部,411第四壳体,412第四输出轴,420光电传感器,430挡板,440轴承装置;
67.50底座;55旋转座,551台面,552第一转轴;
68.60支撑臂,620第一连接部,630第二连接部;
69.70连接臂,710第一弯折部,720第二弯折部;
70.80工作臂,810安装孔,820安装槽;
71.90机械手,910第五驱动部,920第二螺杆,921止推垫片,930第二导向螺母,931圆柱凸台,940夹持部,941避让空间,950连杆机构,951第一杆,9511滑槽,9512第一铰接点,9513第二铰接点,952第二杆,9521第三铰接点,9522第四铰接点,953弯折结构,960基座,961第一盖板,962第二盖板,970第六驱动部,980传动机构,981连杆,982第二转轴,983第二螺杆,984第二导向螺母,985连接块,986滑竿,990第一摄像装置,991摄像支架,992摄像头,901连接轴,911限位孔;
72.90’机械手,910’主驱动部,912’副齿轮组,920’第二螺杆,930’第二导向螺母,931’圆柱凸台,940’夹持部,951’第一杆,9511’第一铰接点,9512’第二铰接点,952’第二杆,9521’第三铰接点,9522’第四铰接点,9523’滑槽,953’第一连杆机构,954’第二连杆机构,955’主齿轮组,960’基座,961’第一盖板,962’第二盖板,963’收纳槽,970’副驱动部,980’弹性复位件,990’第一摄像装置,991’摄像支架,992’摄像头,993’避让折弯,901’连接
轴;
73.002自移动清洁设备,010设备本体,011容纳腔,020主动轮,030从动轮,040清洁系统,050第二摄像装置,060控制系统,070处理系统。
具体实施方式
74.在下文的描述中,给出了大量具体的细节以便提供对本实用新型所提供的技术方案更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本实用新型所提供的技术方案可以无需一个或多个这些细节而得以实施。
75.应予以注意的是,这里所使用的术语仅是为了描述具体实施例,而非意图限制根据本实用新型的示例性实施例。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
76.现在,将参照附图更详细地描述根据本实用新型的示例性实施例。然而,这些示例性实施例可以多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施例。应当理解的是,提供这些实施例是为了使得本实用新型的公开彻底且完整,并且将这些示例性实施例的构思充分传达给本领域普通技术人员。
77.如图1至图35所示,本实用新型第一方面的实施例提供了一种机械关节(下文提及的第三机械关节30),本实用新型第二方面的实施例提供了一种机械臂001,本实用新型第三方面的实施例提供了一种自移动清洁设备002。其中,自移动清洁设备002可以为扫地机器人、扫拖一体机、或满足要求的其他自移动清洁设备002。
78.具体地,自移动清洁设备002包括但不限于:设备本体010、清洁系统、驱动系统、感知系统、控制模块、能源系统和人机交互系统等。上述各个系统相互协调配合,使自移动清洁设备002能够自主移动以实现清洁功能。清洁设备中构成上述各系统的功能元件等集成地设置在设备本体010内。
79.进一步地,机械关节应用于机械臂001,机械臂001包括第一臂和第二臂,机械关节(如第三机械关节30)用于连接第一臂和第二臂,以使支撑臂相对于第一臂转动,以满足机械臂001的不同姿态的操作需求,扩大产品的使用范围。机械臂001应用与自移动清洁设备002,如机械臂001与自移动清洁设备002的设备本体010连接,以实现自移动清洁设备002附近的障碍物、物品、垃圾的抓取或移动,以更好的实现自主清洁功能。
80.如图4、图5、图6和图8所示,在本实用新型提供的一些可能实现的实施例中,机械臂001包括:底座50、旋转座55、支撑臂60、连接臂70、工作臂80和机械手90,底座50连接在容纳腔011内,即整个机械臂001通过底座50与容纳腔011内设置的安装结构安装在容纳腔011内,以固定在设备本体010上。具体地,安装结构可以为安装座、安装孔、卡槽或其他结构,即底座50可以通过螺丝、卡槽卡钩或满足要求的其他结构固定在容纳腔011内。
81.进一步地,旋转座55通过第一机械关节10与底座50连接以使旋转座55相对于底座50可转动,支撑臂60通过第二机械关节20与旋转座55连接以使支撑臂60相对于旋转座55可折叠或展开,如支撑臂60相对于旋转座55可抬升或降落。连接臂70的第一端通过一个第三机械关节30与支撑臂60连接以使连接臂70相对于支撑臂60可折叠或展开,如连接臂70相对
于支撑臂60可抬升或降落,连接臂70的第二端通过另一个第三机械关节30与工作臂80连接以使工作臂80相对于连接臂70可折叠或展开,即工作臂80相对于连接臂70可抬升或降落,工作臂80通过第四机械关节40与机械手90连接以使机械手90相对于工作臂80可转动。
82.也就是说,本实用新型实施例提供的机械臂001,为五个自由度、三臂段可折叠设计。由此,能够增大机械臂001的运动范围,进而提高自移动清洁设备002的清洁范围,扩大产品的使用范围。同时,可折叠设计的机械臂001,使得机械臂001的可容纳性腔,即折叠后的机械臂001的体积较小,便于收纳。
83.其中,第一机械关节10可以理解为腰部旋转关节,第二机械关节20可以理解为腰部升降关节,两个第三机械关节30可以分别为能够升降的肩关节和肘关节,第四机械关节40为能够旋转的腕关节。
84.具体地,如图16、图17、图18、图19、图20、图21和图22所示,本实用新型第一方面的实施例,提供了一种机械关节,该机械关节对应上文中的第三机械关节30。该机械关节用于连接机械臂001中的第一臂和第二臂,第三机械关节30连接在连接臂70的两端,以实现连接臂70与支撑臂60、连接臂70与工作臂的转动连接。具体地,连接臂70的两端分别通过第三机械关节30与支撑臂60和工作臂80连接,即当一个第三机械关节30连接连接臂70和支撑臂60时,连接臂70相当于第一臂,支撑臂60相当于第二臂;当另一个第三机械关节30连接连接臂70和工作臂80时,连接臂70相当于第一臂,工作臂80相当于第二臂。
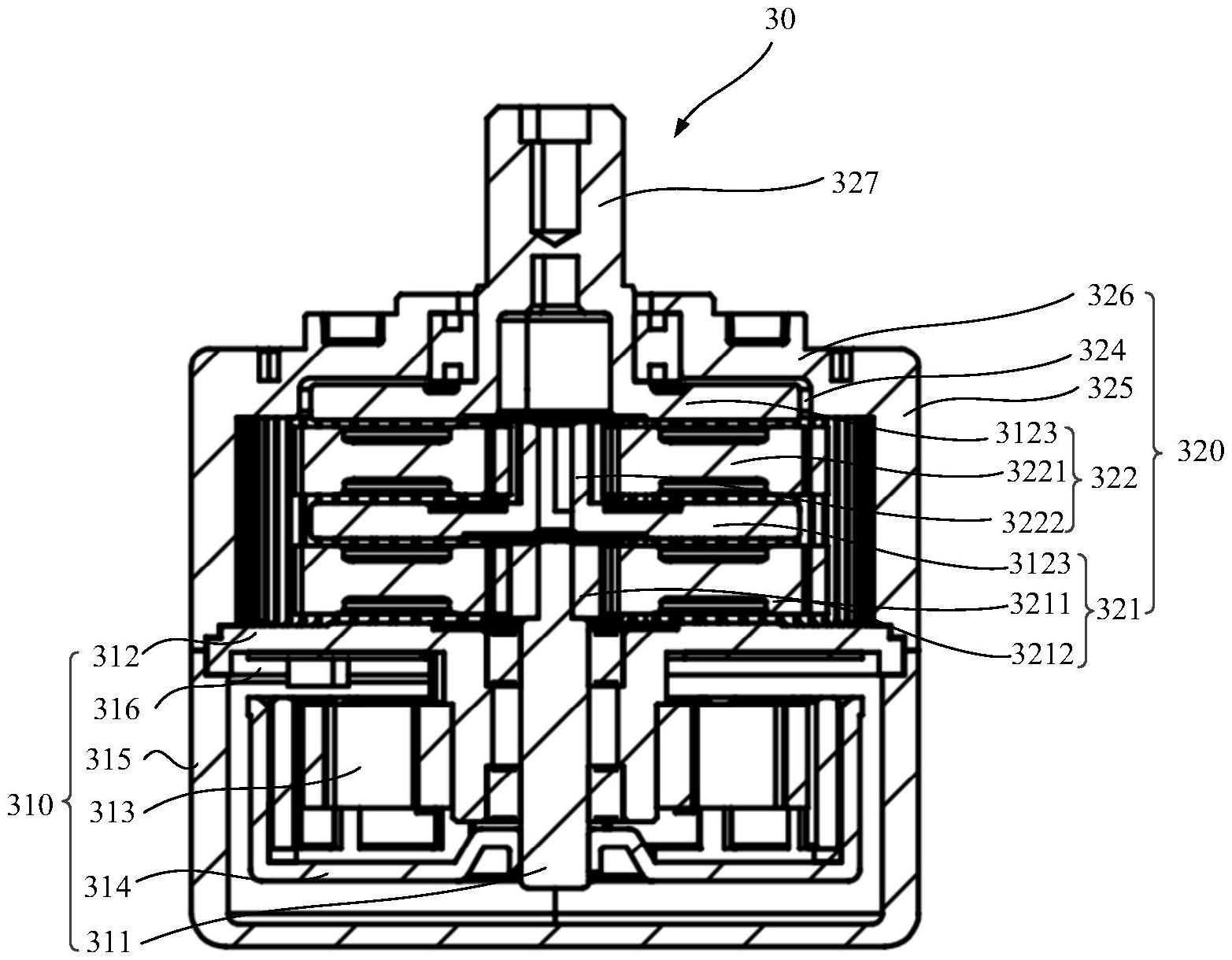
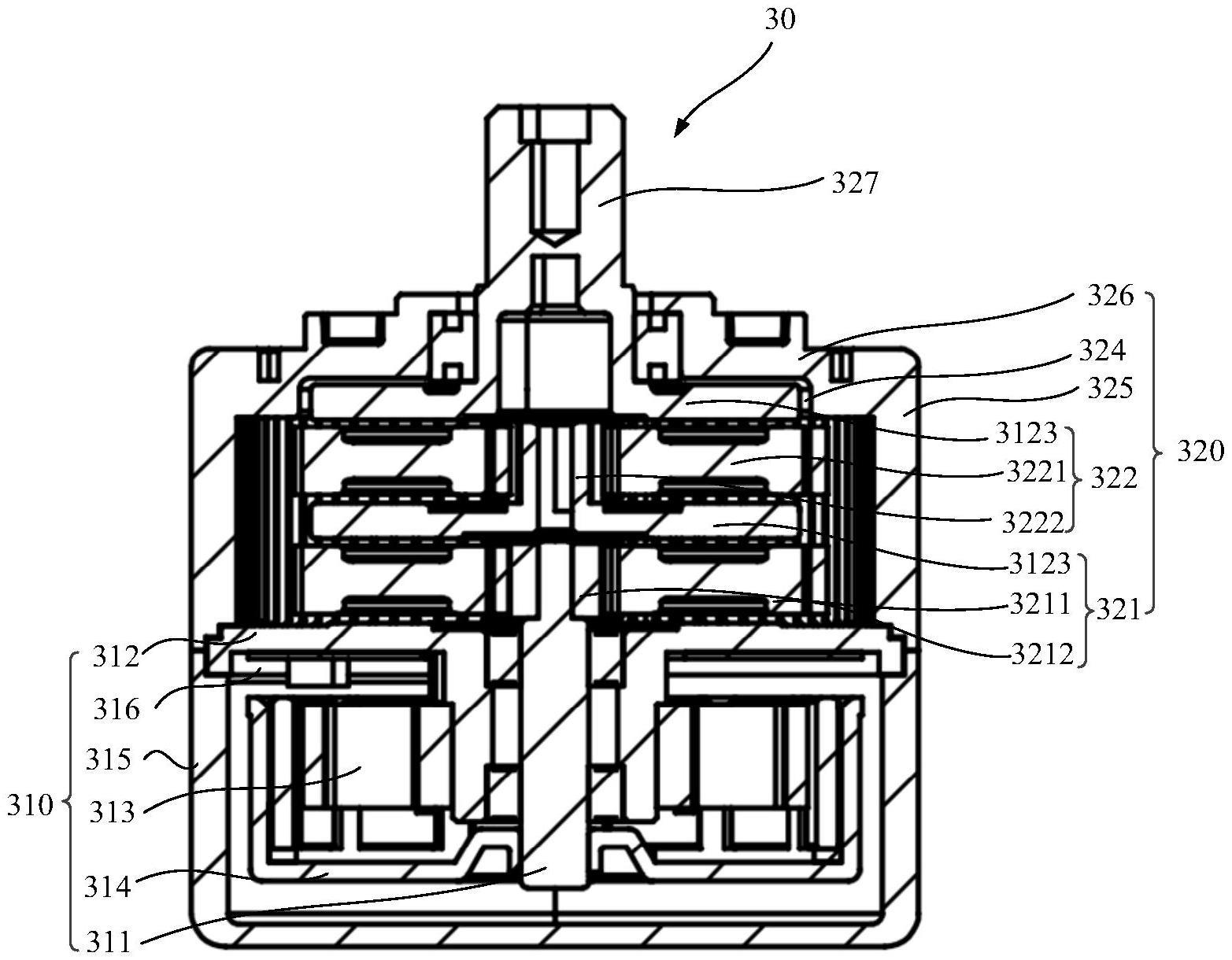
85.进一步地,如图19所示,该机械关节(第三机械关节30)包括电机310和行星减速机构320,电机310包括第一输出轴311、电机基板312、定子313、转子314,转子314位于定子313的外部,第一输出轴311穿设于电机基板312,定子313与电机基板312连接并位于第一输出轴311的周侧;行星减速机构320包括一级齿轮组321和输出端,一级齿轮组321与第一输出轴311连接,并与电机基板312邻近设置,输出端用于驱动第二臂相对于第一臂转动。
86.其中,行星减速机构320用于连接电机310和第二臂,以将电机310的动力减速后传动至第二臂以带动第二臂相对于第一臂转动,即本实用新型实施例提供的第三机械关节30为转动机械关节。该转动机械关节的第三驱动部采用减速电机,具体地,该转动机械关节的第三驱动部可以为无刷伺服减速电机。
87.其中,电机310为外转子电机,电机310的第一输出轴311穿设于电机基板312与行星减速机构320的一级齿轮组321连接,以将动力传递至行星减速机构320。电机310的定子313与电机基板312连接并位于第一输出轴311的周侧,即定子313与第一输出轴311同轴设置,通过一级齿轮组321与电机基板312邻近设置,使得电机基板312可以作为行星减速机构320的输入端盖,即电机基板312集成有电机基板312和齿轮箱的输入端盖的作用。与相关技术中的行星减速电机相比,简化了行星减速机构齿轮箱的输入端盖的设置,结构简单,成本较低,且能够满足第三机械关节30结构紧凑、体积较小的设计需求。同时,能够提高电机310和行星减速机构320的齿轮箱的同心度,有利于降低齿轮箱的磨损,提高第三机械关节30的可靠性,同时,有利于降低第三机械关节30工作的噪声,降低对用户的影响,提高用户使用的满意度。
88.在上述实施例中,电机基板312远离一级齿轮组321的一侧设置有环状凸台,第一输出轴311穿设于环状凸台并与环状凸台转动连接。具体地,第一输出轴311穿过环状凸台,第一输出轴311上套设有轴承,轴承位于第一输出轴311和环状凸台之间,以实现第一输出
轴311和环状凸台的转动连接。
89.其中,第一输出轴311与环状凸台同轴设置,定子313分布在环状凸台的周侧,由此,使得定子313能够分布在第一输出轴311的周侧,并与第一输出轴311同轴设置,结构简单,易于实现。
90.进一步地,电机310还包括霍尔板316,即本实用新型实施例的第三机械关节30的电机310为霍尔电机,其中,霍尔板316与电机基板312连接,沿第一输出轴311的轴向方向,霍尔板316位于定子313和电机基板312之间。霍尔板316的设置,能够较好的检测到转子314的位置,使得电机310使用时稳定,启动时扭矩大,无异响,进一步降低机械关节的工作噪音,降低对用户的影响。
91.在本实用新型提供的一些可能实现的实施例中,如图19所示,电机310还包括:电机罩315,电机罩315与电机基板312连接并合围成电机安装腔317,定子313、转子314位于电机安装腔317内,可以理解的是,霍尔板316也位于电机安装腔317内。由此,通过电机罩315和电机基板312对定子313、转子314进行保护作用,提高电机310的使用寿命,提高机械关节的可靠性。其中,行星减速机构320位于电机安装腔317的外部。
92.在本实用新型提供的一些可能实现的实施例中,如图19所示,行星减速机构320还包括:二级齿轮组322、内齿圈325和输出端盖326,输出端盖326与第一臂连接,内齿圈325的两端分别与电机基板312、输出端盖326连接并合围成减速安装腔324。一级齿轮组321位于减速安装腔324内,并包括第一太阳轮3211、第一行星轮3212和第一行星架3213,第一太阳轮3211固定在第一输出轴311上,二级齿轮组322与输出端盖326邻近设置,并包括位于减速安装腔324内第二太阳轮3221、第二行星轮3222和第二行星架3223,第一行星轮3212和第二行星轮3222均与内齿圈325啮合,第二太阳轮3221固定在第一行星架3213上,第二行星架3223包括穿设于输出端盖326的第二输出轴327,第二输出轴327作为输出端与第二臂连接。
93.在该实施例中,行星减速机构320为二级行星减速机构。电机310的动力通过第一输出轴311经一级齿轮组321相啮合的第一太阳轮3211和第一行星轮3212传递给第一行星轮3212,由于一级齿轮组321的第一行星轮3212与内齿圈325相啮合,会带动第一行星架3213转动,通过二级齿轮组322相啮合的第二太阳轮3221和第二行星轮3222传递给第二行星轮3222,由于二级齿轮组322的第二行星轮3222与内齿圈325啮合,会带动第二行星架3223转动,进而使第二行星架3223位于减速安装腔324外部的第二输出轴327转动,第二输出轴327作为行星减速机构320的输出端与第二臂连接,进而带动第二臂相对于第一臂转动。
94.在上述实施例中,如图19和图20所示,内齿圈325与输出端盖326为一体式结构,这样的设置,有利于提高内齿圈325的刚度,并提高扭矩传递强度,进而提高第三机械关节30动作的稳定性和可靠性,同时,内齿圈325与输出端盖326一体式结构,有利于批量生产,简化了装配步骤,有利于节约成本。
95.在本实用新型提供的一些可能实现的实施例中,第一臂为连接臂70,连接臂70的两端均与行星减速机构320的输出端连接,第二臂为支撑臂60或工作臂80。其中,如图14所示,第一臂上设置有定位结构,输出端盖326远离电机基板312的一侧设置有限位结构3261,限位结构3261与定位结构配合,以对输出端盖326相对于第一臂的转动进行限位。也就是说,利用限位机构和定位机构相配合,用于转动定位和承受扭矩,以提高第三机械关节30工
作的可靠性和稳定性。
96.进一步地,定位机构和限位结构3261中的一个可以为凸起结构,另一个为凹槽结构,通过凸起结构和凹槽结构相配合,能够实现转动定位和承受扭矩。具体地,定位结构可以为设置在第一臂上的凹槽结构,限位结构3261可以为设置在输出端盖326上的凸起结构。可以理解的是,也可以在输出端盖326上设置凹槽结构,在第一臂上设置凸起结构,同样能够实现限位的功能。
97.在本实用新型提供的一些可能实现的实施例中,如图21所示,第三机械关节30还包括:第一轴承330、法兰轴承340、第一连接件350和第一预紧垫片360。其中,第一轴承330套设在第二输出轴327的外部,输出端盖326通过第一轴承330与第二输出轴327转动连接。
98.第一臂包括相对设置的第一连接部620和第二连接部630,第一连接部620上设置有定位结构,即第一连接部620与输出端盖326邻近设置,并通过定位结构和限位结构3261进行限位,第二连接部630位于第一连接部620远离输出端盖326的一侧,法兰轴承340与第二连接部630连接,即法兰轴承340安装在第二连接部630上,如法兰轴承340由第二连接部630远离第一连接部620的一侧卡入第二连接部630,第二输出轴327通过法兰轴承340与第二连接部630转动连接。第二输出轴327位于减速安装腔324外部的端部设置有连接孔3271,第一连接件350能够与连接孔3271连接。沿第二输出轴327的轴向,第一预紧垫片360夹设在第一连接件350和第二输出轴327之间,且第一预紧垫片360朝向第二输出轴327的一侧能够与法兰轴承340抵接,即法兰轴承340和第二输出轴327位于第一预紧垫片360的同一侧。
99.当第一预紧垫片360夹设在第一连接件350和第二输出轴327之间后,第一预紧垫片360能够作为挡板对法兰轴承340相对于第二连接部630沿第二输出轴327的轴向向远离第二连接部630的方向的运动进行限位,因此,能够将法兰轴承340可靠固定在第二连接部630上,同时,能够将第二输出轴327固定在第二连接部630上,由此,能够限制第二输出轴327的轴向方向的移动。
100.也就是说,本实用新型实施例提供的第三机械关节30,采用简支梁形式连接,第一臂靠近电机310侧的第一连接部620通过定位结构与输出端盖326的限位结构3261相配合,限制电机310圆周转动,且第一连接部620沿用减速电机310的第一轴承330与第二输出轴327转动连接,第二连接部630采用法兰轴承340与第二输出轴327转动连接,并利用第一连接件350与第二输出轴327远离电机基板312端部的连接孔3271连接,将第一预紧垫片360夹设在第一连接件350和第二输出轴327之间,且第一预紧垫片360朝向第二输出轴327的一侧能够与法兰轴承340抵接,由此,与法兰轴承340的自身结构相配合,能够将法兰轴承340安装在第二连接部630上,同时,能够限制第二输出轴327的轴向方向的移动,进而能够限制电机310的轴向活动。这样的设置,结构简单,有利于减小第三机械关节30的体积,能够满足机械臂001结构紧凑、体积较小的设计需求,扩大机械关节的使用范围。
101.具体地,法兰轴承340的外缘卡设在第二连接部630的安装通孔内,并通过第一预紧垫片360与法兰轴承340抵接,进而能够沿第二输出轴327的轴向,将法兰轴承340限定在第二连接部630上。
102.在上述实施例中,如图21所示,第一连接件350包括第一头部351和第一杆部352,如第一连接件350为螺栓,第一连接孔3271为螺纹孔,第一杆部352与连接孔3271连接,沿第二输出轴327的轴向,第一预紧垫片360位于第一头部351和第二输出轴327的端部之间,进
而通过调节第一杆部352与连接孔3271的连接长度,能够使第一预紧垫片360夹紧在第二输出轴327的端部和第一连接件350的第一头部351之间。
103.其中,在平行于第二输出轴327径向的平面内,第一预紧垫片360的投影与第二输出轴327的投影有重合,第一预紧垫片360的投影与法兰轴承340的投影有重合,使得第一预紧垫片360的同一侧能够同时与法兰轴承340和第二输出轴327的端部抵接,进而能够将法兰轴承340沿第二输出轴327的轴向限定在第二连接部630上,并能够限制第二输出轴327的轴向方向的移动,进而能够限制电机310的轴向活动。
104.在本实用新型提供的一些可能实现的实施例中如图18、图19、图20、图21和图22所示,第三机械关节30还包括:抱箍370和第二连接件380。第二输出轴327位于减速安装腔324外部的端部的周侧设置有第一限位面3272和第二限位面,第一限位面3272用于与抱箍370接触,第二限位面用于与第二臂接触,第二臂位于第一连接部620和第二连接部630之间,抱箍370和第二臂通过第二连接件380连接。由此,可以将第二输出轴327与第二臂可靠连接,使得第二输出轴327转动带动第二臂转动,以实现第二臂相对于第一臂的转动,如实现第二臂相对于第一臂的抬升操作。
105.其中,第一限位面3272和第二限面的设置,有利于增大第二输出轴327与抱箍370、第二臂的接触面积,并起到了一定的限位作用,进而利用第二连接件380连接抱箍370和操作机构,即可可靠地实现第二臂和第二输出轴327的连接。
106.具体地,第二连接件380可以为螺栓,抱箍370和操作机构可以通过螺栓连接。
107.在上述实施例中,第一限位面3272和第二限位面相对设置,且均为平面结构,即第二输出轴327为双扁轴。其中,相对设置的平面结构便于加工和定位,且能够提高第二输出轴327与抱箍370、第二输出轴327与操作机构的接触面积,并起到了良好的定位作用,进而有利于提高第二输出轴327与操作机构连接的可靠性和稳定性。
108.进一步地,第三机械关节30还包括第三转角检测装置,第三转角检测装置设置于第三驱动部的第二输出轴上,用于检测第二输出轴的转角,第三驱动部还根据第三转角检测装置的检测结果开启或关闭,由此,可以灵活地控制第二臂相对于第一臂转动至需求的任何角度,以满足机械臂001不同工况需求,扩大产品的使用范围。具体地,第三转角检测装置可以为霍尔传感器组件。
109.如图9、图10、图11和图12所示,在本实用新型提供的一些可能实现的实施例中,第一机械关节10包括第一驱动部110、旋转关节120、第一传动组件130,第一驱动部110可以设置在底座50上,第一传动组件130用于传动连接第一驱动部110和旋转关节120,旋转关节120与旋转座55活动连接,第一驱动部110用于通过第一传动组件130驱动旋转关节120转动,以使旋转座55相对于底座50旋转。
110.本实用新型提供的第一机械关节10,第一传动组件130可以为带传动组件、齿轮齿条传动组件、或满足要求的其他传动组件,第一传动组件130用于改变第一驱动部110的输出力的传递方向,因此利用第一传动组件130传动连接第一驱动部110和旋转关节120,使得第一传动组件130将第一驱动部110的动力改变方向后传递至旋转关节120,并通过旋转关节120带动旋转座55相对于底座50旋转。这样的设置,与相关技术中利用第一驱动部直接驱动旋转座旋转的传统方式相比,能够减小机械臂001的整体高度,并缩小机械臂001的整体体积,能够满足机械臂001结构紧凑、体积较小的设计需求。
111.如图9和图12所示,在本实用新型提供的一些可能实现的实施例中,第一传动组件130包括通过第一传动带131传动连接的第一同步轮132和第二同步轮133,第一同步轮132与第一驱动部110连接,第二同步轮133与旋转座55连接,旋转座55通过旋转关节120与底座50活动连接。
112.其中,第一驱动部110可以为电机,第一驱动部110安装在底座50上,第一同步轮132与电机的输出轴连接。由此,第一驱动部110工作驱动第一同步轮132转动,通过第一传动带131带动第二同步轮133转动,由于旋转座55通过旋转关节120与底座50活动连接,由此,可以带动旋转座55相对于底座50旋转。由于第一同步轮132和第二同步轮133平行设置,即第一传动组件130的两个同步轮平行设置,进而能够使第一驱动部110与支撑臂60相对平行设置,与相关技术中利用第一驱动部直接驱动旋转座55需要第一驱动部和旋转座55轴向依次设置相比,能够减小整个机械臂001的轴向距离,进而能够满足机械臂001结构紧凑、体积较小的设计需求,扩大产品的使用范围。
113.如图12所示,在本实用新型提供的一些可能实现的实施例中,旋转关节120包括位于旋转座55和底座50之间的滚动组件121,其中,滚动组件121包括滚珠或滚针,即旋转座55与底座50滚动连接,滚动组件121的设置,使得旋转关节在旋转过程中,能够承受轴向载荷,进而有利于提高产品的可靠性。具体地,滚动组件121为推力轴承装置。
114.如图12所示,在本实用新型提供的一些可能实现的实施例中,旋转座55包括插设于底座50的第一转轴552以及位于第一转轴552上部的台面551,滚动组件121套设在旋转座55的第一转轴552的外侧,第二同步轮133与台面551连接,滚动组件121包括分布在底座50的相对两端的第一滚动组件1211和第二滚动组件1212;其中,底座50的相对两面分别与第一滚动组件1211、第二滚动组件1212滚动接触。
115.其中,第一滚动组件1211和第二滚动组件1212相配合,构成轴承装置,由此,第一驱动部110工作带动第一同步轮132转动,通过第一传动带131,能够带动第二同步轮133转动,由于底座50和旋转座55的第一转轴552之间通过第一滚动组件1211和第二滚动组件1212滚动连接,进而能够使旋转座55相对于底座50转动。
116.具体地,第一滚动组件1211、第二滚动组件1212可以为滚珠或滚针,两个滚动组件121相配合,能够构成轴承装置,具体地,两个滚针或滚珠组件相配合,能够构成推力轴承。其中,底座50的相对两面分别与第一滚动组件1211、第二滚动组件1212滚动接触,即第一滚动组件1211和第二滚动组件1212直接与底座50接触。
117.由于传统的轴承本身包括滚珠或滚针、以及上下部的垫片,本实用新型实施例提供的第一机械关节10,通过底座50的相对两面分别与第一滚动组件1211、第二滚动组件1212滚动接触,简化了第一滚动组件1211与底座50之间的垫片、第二滚动组件1212与底座50之间的垫片的设置,进而可以降低机械关节的轴向高度,能够满足机械关节结构紧凑、体积较小的设计需求,进而能够满足机械臂001结构紧凑、体积较小的设计需求。
118.在上述实施例中,如图10和图12所示,旋转座55的台面551位于底座50的外部,如旋转座55的台面551位于底座50的上方,第二滚动组件1212远离第一滚动组件1211的一端与台面551朝向底座50的一侧滚动接触,即第二滚动组件1212位于第一滚动组件1211的上方,第二滚动组件1212的上下两个端面分别与旋转座55的台面551和底座50滚动接触,即第二滚动组件1212直接将旋转座55的台面551和底座50作为上下两个垫片。这样的设置,与传
动的轴承相比,简化了第二滚动组件1212上下两个垫片的设置,进而能够降低旋转关节120的轴向高度,降低了该第一机械关节10的轴向高度,进而能够满足该第一机械关节10结构紧凑、体积较小的设计需求。
119.如图12所示,在本实用新型提供的一些可能实现的实施例中,旋转关节120还包括:第一垫片122和预紧组件123,其中,第一滚动组件1211远离第二滚动组件1212的一端与第一垫片122滚动接触;预紧组件123用于通过第一垫片122调节第一滚动组件1211和第二滚动组件1212之间的距离。
120.在该实施例中,第一滚动组件1211的上下两个端面分别与底座50和第一垫片122滚动接触,预紧组件123通过第一垫片122能够调节第一滚动组件1211和第二滚动组件1212之间的距离,进而能够将第一滚动组件1211和第二滚动组件1212拉紧,由此,可以在有限的空间内大大提高第一机械关节10的刚度。
121.在上述实施例中,如图10所示,预紧组件123包括:第一调节件1231和第一预紧垫片1232,第一预紧垫片1232位于第一垫片122远离第一滚动组件1211的一侧,第一调节件1231穿设于第一预紧垫片1232与旋转座55的第一转轴552活动连接,第一调节件1231旋转能够带动第一预紧垫片1232相对于旋转座55的第一转轴552上下移动,以调节第一滚动组件1211和第二滚动组件1212之间的距离。
122.如第一调节件1231包括第一杆部和第一头部,如第一调节件1231为螺栓,旋转座55的第一转轴552的底部设置有螺纹孔,第一杆部穿设于第一预紧垫片1232与第一转轴552连接,第一头部卡接在第一预紧垫片1232远离第一垫片122的一侧,第一垫片122位于第一预紧垫片1232和第一滚动组件1211之间,由此,通过旋转第一调节组件1231,能够使第一预紧垫片1232随着第一调节件1231沿第一转轴552上下移动,由此,通过第一垫片122能够推动第一滚动组件1211向靠近或远离第二滚动组件1212的方向移动,进而能够调节第一滚动组件1211和第二滚动组件1212之间的距离,进而将第一滚动组件1211和第二滚动组件1212拉紧。
123.在本实用新型提供的一些可能实现的实施例中,如图12所示,旋转关节120还包括:滑动套124,具体地,滑动套124可以为铜套,或满足要求的其他结构。滑动套124套设在旋转座55的第一转轴552的外侧,位于第一滚动组件1211和第二滚动组件1212之间,且容纳在底座50朝向第一滚动组件1211的一侧设置的第一安装槽内。其中,滑动套124的设置,能够承受径向力,进而有利于提高旋转关节120的可靠性。
124.也就是说,第一机械关节10,通过三个轴承进行约束,具体为第一滚动组件1211的推力滚针轴承、第二滚动组件1212的推力滚针轴承、滑动套124的滑动轴承,由此,实现旋转关节120既可以承受轴向力,也可以承受径向力,大大提高了旋转关节120的可靠性。
125.在本实用新型提供的一些可能实现的实施例中,如图9和图12所示,第一机械关节10还包括:检测轴170、第一转角检测装置140和第二同步带轮组件150,检测轴170可转动地设置在底座50上,如检测轴170可以与第一驱动部110的输出轴平行设置,第二同步带轮组件150用于传动连接检测轴170和第一驱动部110的输出轴,第一转角检测装置140用于检测检测轴170的转角。
126.由于第二同步带轮组件150传动连接检测轴170和第一驱动部110的输出轴,由此,通过第一转角检测装置140检测检测轴170的转角即可知晓第一驱动部110的输出轴的转
角,进而实现了对第一驱动部110输出轴转角的测量。同时,由于检测轴170与第一驱动部110的输出轴相对平行设置,第一转角检测装置140设置在检测轴170上,这样的设置,与相关技术中直接将第一转角检测装置设置在第一驱动部的上部对第一驱动部的输出轴进行转角检测相比,降低了第一驱动部110的轴向高度,进而使得第一机械关节10的轴向高度降低,使得整个机械臂001的轴向高度降低,能够满足机械关节结构紧凑、体积较小的设计需求。
127.也就是说,本实用新型实施例提供的第一机械关节10,为了解决传统机械关节中将第一转角检测装置设置在第一驱动部上而使驱动部的整体高度较高的问题,将第一转角检测装置从第一驱动部的输出轴的垂直上部移动至与第一驱动部水平方向平行设置的检测轴170上,并通过第二同步带轮组件150传动连接检测轴170和第一驱动部110的输出轴,可以实现对第一驱动部110的输出轴的转角的测量,同时,使得第一机械关节10的整体高度降低。
128.在上述实施例中,如图9和图12所示,第一机械关节10还包括固定架180,固定架180与底座50连接,并架设在检测轴170的周侧,第二同步带轮组件150包括通过第二传动带151连接的第三同步轮和第四同步轮,第三同步轮与第一驱动部110的输出轴连接,即第三同步轮与第一同步轮132同轴设置。第四同步轮与检测轴170连接,可以理解的是,第四同步轮可以位于固定架180的内部,第一转角检测装置140包括磁感应件141和磁性件142,磁感应件141设置在固定架180上,磁性件142设置在检测轴170上。由此,第一驱动部110的输出轴转动带动第三同步轮转动,通过第二传动带151带动第四同步轮转动,进而能够带动检测轴170、以及检测轴170上的磁性件142转动,磁感应件141根据感应到的磁性件142的位置变化,即可实现检测轴170的转角测量,结构简单,易于实现。
129.具体地,检测轴170和旋转座55可以分布在第一驱动部110的相对两侧,由此可以合理利用底座50的空间和结构,实现机械臂001结构紧凑、体积较小的设计需求。
130.具体地,磁性件142为磁铁,磁感应件141为霍尔传感器,磁性件142通过粘结剂、卡槽等方式,固定在检测轴170上。
131.在本实用新型提供的一些可能实现的实施例中,如图9所示,第一机械关节10还包括:张紧装置160,张紧装置160用于调节第一传动组件130中的第一传动带131的张紧度,以提高第一传动组件130的传动效率和传动精度,提高旋转座55相对于底座50旋转的准确性。
132.在上述实施例中,张紧装置160包括导向部161、张紧轴和第二调节件。其中,导向部161可以设置在底座50上,以合理利用底座50的结构。导向部161的内底部设置有滑槽9511,张紧轴插设于导向部161,如张紧轴从上方插入导向部161,且张紧轴的端部位于滑槽9511内并可沿导向槽向靠近或远离第一传动带131的方向滑动,张紧轴位于导向部161外部的部分设置有与第一传动带131连接的张紧轴承162。第二调节件插设于导向部161的调节孔163并与张紧轴抵接,调节第二调节件与导向部161的连接位置能够调节张紧轴在导向槽内的位置,进而能够对第一传动带131进行张紧操作。
133.其中,第二调节件可以为螺栓,导向部161的侧面设置有调节孔163,调节孔163为螺纹孔,第二调节件与螺纹孔连接,并能够与位于导向部161内的张紧轴抵接,通过旋拧第二调节件,即可将张紧轴向靠近或远离第一传动带131的方向移动,由于第一传动带131与张紧轴通过张紧轴承162转动连接,进而能够实现对第一传动带131的张紧操作,结构简单,
操作方便。
134.如图13、图14和图15所示,在本实用新型提供的一些可能实现的实施例中,第二机械关节20包括第二驱动部220、第一螺杆230和第一导向螺母210,第一导向螺母210与第一螺杆230螺纹连接,并铰接在旋转座55上,第二驱动部220设置在支撑臂60上,第一螺杆230的第一端与第二驱动部220连接,第一螺杆230的第二端穿过第一导向螺母210并朝向旋转座55设置;其中,第二驱动部220用于驱动第一螺杆230旋转,以使第一螺杆230和第一导向螺母210相对运动以带动支撑臂60相对于旋转座55抬升或降落。
135.其中,第二驱动部220可以为电机,电机的输出轴与第一螺杆230连接,如第二驱动部220的输出轴与第一螺杆230通过粘结剂连接,可以理解的是,第二驱动部220的输出轴与第一螺杆230还可以通过键或其他方式连接。通过第二驱动部220的输出轴转动,驱动第一螺杆230旋转,使得第一导向螺母210和第一螺杆230能够相对运动,由于第一导向螺母210铰接在旋转座55上,第二驱动部220设置在支撑臂60上,使得第一螺杆230能够相对于第一导向螺母210向靠近旋转座55或远离旋转座55的方向移动,进而能够使支撑臂60相对于旋转座55抬升或降落。
136.也就是说,本实用新型实施例提供的第二机械关节20,将第二驱动部220设置在支撑臂60上,第一导向螺母210铰接在旋转座55上并与第一螺杆230螺纹连接,通过第二驱动部220驱动第一螺杆230相对于第一导向螺母210旋转,使得第一螺杆230能够相对于第一导向螺母210运动,进而使得支撑臂60相对于旋转座55抬升或降落,即支撑臂60相对于旋转座55可处于折叠状态或展开状态,以满足机械臂001不同的功能需求。
137.可以理解的是,当支撑臂60相对于旋转座55处于折叠状态时,如支撑臂60处于水平位置,即支撑臂60处于零位状态时,机械臂001可以处于收纳位置不工作,以减小机械臂001占用的空间;当支撑臂60相对于旋转座55处于展开状态时,如支撑臂60相对于旋转座55展开至竖直位置时,机械臂001可以处于展开状态执行工作。其中,通过第二驱动部220、第一螺杆230和第一导向螺母210相配合即可实现支撑臂60相对于旋转座55的抬升或降落,结构简单、操作方便,能够满足机械臂001结构紧凑、体积较小的设计需求。
138.进一步地,支撑臂60与旋转座55铰接,第一导向螺母210与旋转座55铰接,使得第二驱动部220驱动第一螺杆230相对于第一导向螺母210运动带动支撑臂60相对于旋转座55抬升或降落的过程中,第一导向螺母210与旋转座55不会干涉,即第一导向螺母210能够相对于旋转座55转动,以确保第一螺杆230相对于第一导向螺母210在一定范围内运动,并与支撑臂60相对于旋转座55的转动范围相适配。
139.可以理解的是,第一导向螺母210相对于旋转座55的转动角度需要大于或等于支撑臂60相对于旋转座55的转动范围,以满足机械臂001的使用需求,如第一导向螺母210相对于旋转座55的转动范围可以为90
°
至360
°
、或满足要求的其他范围。
140.具体地,第一导向螺母210朝向旋转座55的一侧设置有第一圆柱凸台,第一导向螺母210通过第一圆柱凸台与旋转座55铰接,这样的设置,使得第一导向螺母210相对于旋转座55的转动范围可到达到360
°
,进而能够满足支撑臂60相对于旋转座55较大抬升范围发需求,扩大了产品的使用范围,且第一圆柱凸台结构简单,便于加工和装配,成本较低。
141.在本实用新型提供的一些可能实现的实施例中,如图13所示,第二机械关节20还包括:电机座240,其中,电机座240与支撑臂60铰接,即电机座240相对于支撑臂60可转动,
第二驱动部220安装在电机座240上,第一螺杆230插设于电机座240与第二驱动部220连接,这样的设置,使得支撑臂60相对于旋转座55抬升或降落的过程中,与第一螺杆230连接的第二驱动部220不会与支撑臂60发生干涉,进而能够确保第一螺杆230顺利地相对于第一导向螺母210运动,不会发生卡死的现象,进而能够提高第二机械关节20工作的可靠性和顺利性。
142.具体地,电机座240朝向支撑臂60的一侧设置有第二圆柱凸台,电机座240通过第二圆柱凸台与支撑臂60铰接,这样的设置,使得电机座240相对于支撑臂60的转动范围可到达360
°
,进而能够满足支撑臂60相对于旋转座55的抬升角度较大的需求,且第二圆柱凸台结构简单,便于加工和装配,成本较低。
143.也就是说,本实用新型实施例提供的第二机械关节20,通过支撑臂60与旋转座55铰接、第一导向螺母210与旋转座55铰接,电机座240与支撑臂60铰接,由此,构成活动的三角形结构,利用第一螺杆230与第二驱动部220连接,并穿过第一导向螺母210,使得第二驱动部220驱动第一螺杆230旋转能够使第一螺杆230相对于第一导向螺母210运动,以实现支撑臂60相对于旋转座55的抬升或降落,结构简单。
144.在本实用新型提供的一些可能实现的实施例中,如图13、图14和图15所示,第二机械关节20还包括推力轴承250,推力轴承250套设于第一螺杆230的外侧,第一螺杆230设置有第一阶梯结构231,推力轴承250位于第一阶梯结构231和电机座240之间以使第一螺杆230和电机座240转动连接。这样的设置,使得第一螺杆230的轴向推力被电机座240支撑,进而有利于提高第一螺杆230的使用寿命,提高机械关节的可靠性。
145.在本实用新型提供的一些可能实现的实施例中,如图13所示,第二机械关节20还包括:弹性件260,弹性件260连接旋转座55和支撑臂60,弹性件260用于向支撑臂60施加靠近旋转座55的推力。
146.其中,弹性件260的设置,使支撑臂60具有向靠近旋转座55翻转的预紧力,如图13所示,弹性件260使得支撑臂60具有向下(如图13中顺时针)的预紧力,从而消除支撑臂60与旋转座55铰接、第一导向螺母210与旋转座55铰接、电机座240与支撑臂60铰接构成的三角形结构的间隙,降低支撑臂60相对于旋转座55抬升或降落过程中的晃动性,提高第二机械关节20工作的稳定性和可靠性。
147.具体地,弹性件260可以为扭簧,可以理解的是,弹性件260也可以为满足要求的其他结构,扭簧的一端与旋转座55连接,扭簧的另一端与支撑臂60连接,如扭簧的两端分别钩接在旋转座55和支撑臂60上。
148.在本实用新型提供的一些可能实现的实施例中,如图12所示,第二机械关节20还包括:防拉件280,第一螺杆230设置有位于电机座240内部的防拉槽232,防拉件280与电机座240连接并延伸至防拉槽232内。防拉件280的设置,对第二驱动部220起到了良好的保护作用,有利于延长第二驱动部220的使用寿命。
149.进一步地,防拉件280与防拉槽232之间设置有缝隙,即防拉件280与防拉槽232的两个侧壁和底壁之间均具有缝隙,这样的设置,使得第一螺杆230在正常工作的情况下,不会与防拉件280接触,即防拉件280并不会阻碍第一螺杆230正常旋转,进而确保第二机械关节20工作的可靠性。
150.其中,防拉件280与防拉槽232靠近第二驱动部220一侧的槽壁之间的距离小于第
二驱动部220的输出轴的轴线窜动量。这样的设置,当第一螺杆230受拉时,如支撑臂60用于异常使用场景时,如当人为抬升支撑臂60时,第二驱动部220的输出轴在其窜动行程内被拉出,防拉件280与防拉槽232靠近第二驱动部220一侧的槽壁接触,使拉力施加在防拉件280上,第二驱动部220的输出轴此时不受轴向力,从而保护了第二驱动部220,有利于延长第二驱动部220的使用寿命,降低第二机械关节20的故障率,提高第二机械关节20的使用寿命。
151.在上述实施例中,防拉件280为防拉螺栓,防拉槽232为环形槽。其中,防拉螺栓为标准件,成本较低,且方便与电机座240连接,便于装配。防拉槽232为环形槽,便于加工,有利于降低加工成本。
152.在本实用新型提供的一些可能实现的实施例中,如图13所示,第二机械关节20还包括:限位开关290,限位开关290设置在支撑臂60上,第二驱动部220根据限位开关290的触发状态转动或停止转动;其中,支撑臂60转动至第一预设位置时,限位开关290被触发。
153.其中,第一预设位置可以为支撑臂60处于零位状态,如支撑臂60处于水平位置时,若支撑臂60继续向靠近旋转座55的方向转动,如继续向下转动,会存在破坏支撑臂60与旋转座55铰接稳定性、第一导向螺母210与旋转座55铰接稳定性、第一螺杆230与第二驱动部220连接稳定性的情况,进而容易使第二机械关节20故障。因此,当支撑臂60转动至第一预设位置时,设置在支撑臂60上的限位开关290被触发,第二驱动部220根据限位开关290被触发的信号,控制第二驱动部220停止转动,能够避免第二驱动部220继续转动而使第二机械关节20故障的情况发生,进而对机械关节起到了良好的保护作用,有利于延长机械关节的使用寿命,提高机械臂001的可靠性。
154.可以理解的是,当支撑臂60未转动至第一预设位置时,即支撑臂60倾斜或竖直状态下,限位开关290未被触发,第二驱动部220没有接收到限位开关290的触发信号,因此,可以根据其他控制程序控制第二驱动部220继续转动。
155.在上述实施例中,如图13所示,限位开关290包括:开关本体291和触发件292,开关本体291设置在支撑臂60的一侧,触发件292的一端与开关本体291连接,另一端向远离开关本体291的方向延伸,即触发件292的另一端由开关本体291所在的支撑臂60表面向外延伸;其中,当支撑臂60转动至第一预设位置时,如支撑臂60相对于旋转座55转动至水平位置的零位状态时,触发件292的另一端适于与外物抵接并与开关本体291接触,以触发限位开关290。
156.可以理解的是,外物可以为第二机械关节20自身之外的其他结构,如外物可以是机械臂001的其他结构,或者,外物也可以为设置在自移动清洁设备002的设备本体010的容纳腔011内的结构。具体地,外部可以为第一驱动部的壳体,当支撑臂60转动至第一预设位置时,即支撑臂60处于水平放置的零位状态,可以理解的是,开关本体291设置在支撑臂60处于第一位置时位于底部的一侧上,由此,使得触发件292远离开关本体291的一端能够与该外物抵接并与开关本体291接触以触发限位开关290,进而能够使第二驱动部220根据限位开关290的触发信号停止工作,以避免支撑臂60继续向下运动而损坏第二机械关节20,起到保护机械臂001的作用。
157.在本实用新型提供的一些可能实现的实施例中,第二机械关节20还包括:第二转角检测装置,第二转角检测装置设置于第二驱动部220上,用于检测第二驱动部220的输出轴的转角,第二驱动部220还根据第二转角检测装置的检测结果转动或停止转动,由此,可
以灵活地控制支撑臂60相对于旋转座55转动至需求的任何角度,以满足机械臂001不同工况需求,扩大产品的使用范围。
158.具体地,可以在第二机械关节20上设置机械自锁结构,当支撑臂60相对于旋转座55转动至竖直状态时,机械自锁结构动作将支撑臂60相对于旋转座55锁定在该位置处,同时,第二驱动部220可断电,去除机械臂001负载时候第二机械关节20所消耗的功率。
159.如图23、图24、图25和图26所示,在本实用新型提供的一些可能实现的实施例中,第四机械关节40包括第四驱动部410、光电传感器420和挡板430,第四驱动部410设置在工作臂80上,并与机械手90连接以带动机械手90转动,光电传感器420和挡板430中的一个设置于机械手90上,另一个设置于工作臂80上,挡板430用于在机械手90处于零点位置时,改变光电传感器420的感测结果,即光电传感器420和挡板430设置为用于确定机械手90的零点位置。
160.本实用新型实施例提供的第四机械关节40,通过增设光电传感器420和挡板430,当机械手90处于零点位置时,挡板430用于改变光电传感器420的感测结果,因此,根据光电传感器420的感测结果发生改变,即可确定机械手90处于零点位置,进而使得控制系统可以根据处于零点位置的机械手90,执行对应的操作,以提高机械臂001的智能性,提高用户使用的满意度。其中,零点位置可以为操作机构(如机械手90)相对于工作臂80处于收纳状态的位置,或相对旋转的初始位置,如机械手90相对于工作臂的转角为0
°
时,可以称为机械手90处于零点位置。
161.其中,光电传感器420可以设置在机械手90上,挡板430可以设置在第四机械关节40的框架上,或者,光电传感器420可以设置在第四机械关节40的框架上,挡板430可以设置在机械手90上,以满足光电传感器420、挡板430不同结构的需求。其中,机械关节的框架可以为工作臂80、第四驱动部410的壳体411等。
162.在上述实施例中,第四驱动部410与光电传感器420连接,第四驱动部410用于根据光电传感器420的感测结果转动或停止转动。由此,可以根据光电传感器420的感测结果合理控制第四驱动部410的工作状态,进而合理控制机械手90的位置,以使机械手90处于不同位置以满足机械手90不同的工况需求,扩大了产品的使用范围。
163.具体地,当光电传感器420的感测结果发生变化时,有可能是机械手90处于零点位置,即机械手90处于收纳位置,因此,第四驱动部410根据光电传感器420的感测结果停止转动,使得机械手90停止转动维持在零点位置,便于收纳,避免第四驱动部410继续工作使机械手90继续转动而浪费能源且不利用收纳的情况。
164.可以理解的是,当光电传感器420的感测结果未发生变化,有可能是机械手90处于旋转状态或零点状态,第四驱动部410根据光电传感器420的感测结果继续保持当前的转动或停止转动的状态,即可使机械手90维持在当前状态。
165.在本实用新型提供的一些可能实现的实施例中,如图24和图26所示,第四驱动部410包括第四壳体411和第四输出轴412,如第四驱动部为电机,第四驱动部的第四壳体411与工作臂80连接,即第四驱动部410的第四壳体411安装在工作臂80上,光电传感器420设置于工作臂80或壳体411上,也就是说,光电传感器420设置在固定机构上。机械手90包括与第四输出轴412连接的连接轴901,挡板430设置于连接轴901上,即挡板430随着连接轴901的转动而转动。
166.其中,当机械手90处于零点位置时,挡板430用于阻止光电传感器420接收光信号,由此,使得光电传感器420的感测结果会发生改变。结构简单,易于实现,适于推广应用。
167.在本实用新型提供的一些可能实现的实施例中,如图24所示,第四机械关节40还包括:轴承装置440,工作臂80朝向机械手90的一端设置有安装孔810,以及与安装孔810连通位于安装孔810远离机械手90一侧的安装槽820,第四驱动部410位于安装槽820内,连接轴901穿设于安装孔810,轴承装置440位于安装孔810内,工作臂80和连接轴901之间通过轴承装置440相连接。
168.由于第四驱动部410位于安装槽820的内部,使得第四驱动部410的设置,并不会增加工作臂80的尺寸,能够满足第四机械关节40结构紧凑、体积较小的设计需求,扩大使用范围。
169.其中,轴承装置440位于工作臂80的安装孔810内,工作臂80和连接轴901之间通过轴承装置440连接,使得通过轴承装置440能够对连接轴901进行支撑,而连接轴901与第四驱动部410的第四输出轴412连接,进而使得第四驱动部能够带动工作臂80旋转。进一步地,轴承装置440为滚珠轴承或滑动轴承。
170.在上述实施例中,如图24所示,连接轴901的端部设置有限位孔911,第四输出轴412插设于限位孔911与连接轴901连接。限位孔911的设置,起到了良好的限位作用,能够对连接轴901相对于第四输出轴412的转动进行限位,使得第四输出轴412转动能够带动连接轴901转动,进而带动机械手90转动。
171.具体地,限位孔911为d型孔,d型孔使得连接轴901和第四输出轴412为平面限位,起到了类似键的作用,进而实现第四输出轴412转动能够带动连接轴901转动,且d型孔方便加工,便于装配。
172.在本实用新型提供的一些可能实现的实施例中,第四机械关节40还包括:第四转角检测装置,第四转角检测装置设置于第四驱动部410上,用于检测第四输出轴412的转角,第四驱动部410还根据转角检测装置的检测结果转动或停止转动。由此,可以根据转角检测装置检测到的第四输出轴412的转角,合理控制第四驱动部410的工作状态,以使机械手90转动至合适位置,以满足机械手90不同工况的需求。具体地,第四转角检测装置为霍尔传感器。
173.如图27至图34所示,在本实用新型提供的一些可能实现的实施例中,机械手90包括:基座960、第五驱动部910、第二螺杆920、第二导向螺母930、两个夹持部940、两个连杆机构950;基座960与第四机械关节40连接,第五驱动部910与基座960连接,第二螺杆920与第二导向螺母930螺纹连接并与第五驱动部910连接,第二导向螺母930上设置有圆柱凸台931,每个连杆机构950的第一端与圆柱凸台931活动连接,每个连杆机构950的第二端与对应的夹持部940铰接;其中,第五驱动部910驱动第二螺杆920旋转,以使第二导向螺母930相对于第二螺杆920运动以带动两个连杆机构950转动进而驱动两个夹持部940相互靠近或远离。
174.如图27、图28和图29所示,本实用新型实施例提供的机械手90,通过在第二导向螺母950上设置圆柱凸台931,利用圆柱凸台931与两个连杆机构950的第一端活动连接,这样,在第五驱动部910驱动第二螺杆920旋转的过程中,第二导向螺母930会带动每个连杆机构950的第一端相对于第二螺杆920同步运动,因此,会带动两个连杆机构950转动以相互靠近
或远离,进而会带动与两个连杆机构950的第二端连接的两个夹持部940相互靠近或远离,实现机械手90的抓取或放开的操作。由此,利用螺纹连接的第二导向螺母930和第二螺杆920,配合第五驱动部910和两个连杆机构950,即可实现两个夹持部940相互靠近或远离,以实现机械手90的抓取或放开的操作,结构简单,成本较低。
175.其中,圆柱凸台931设置在第二导向螺母930上,即圆柱凸台931与第二导向螺母930可以为一体成型结构,这样的设置,简化了第二导向螺母930与连杆机构950的连接结构的设置,能够满足机械手90结构紧凑、体积较小的设计需求,有利于扩大机械手90的使用范围,使得机械手90能够满足自移动清洁设备结构紧凑、体积较小的设计需求。
176.在本实用新型提供的一些可能实现的实施例中,圆柱凸台931沿第一方向分布在第二导向螺母930的一侧或两侧,两个夹持部940相互靠近或远离的方向与第一方向垂直。
177.其中,两个夹持部940相互靠近或远离的方向可以为第二方向,第一方向垂直于第二方向,如第一方向可以为竖直方向,第二方向可以为水平方向,其中,第一方向和第二方向可以如图30和图28所示。
178.在该实施例中,当圆柱凸台931沿第一方向分布在第二导向螺母930的一侧时,两个连杆机构950的第一端同时与该圆柱凸台931活动连接,当圆柱凸台931沿第一方向分布在第二导向螺母930的两侧时,两个连杆机构950的第一端分别与对应的圆柱凸台931活动连接,即两个连杆机构950从第二导向螺母930的两侧分别与对应的圆柱凸台931活动连接。由于圆柱凸台931沿第一方向分布在在第二导向螺母930的一侧或两侧,这样的设置,使得在第一方向上,两个连杆机构950和第二导向螺母930叠设在一起,与相关技术中的机械手,两个连杆机构950沿第二方向与第二导向螺母930活动连接相比,实现了结构紧凑的设计需求,在各部件结构尺寸不变的情况下,能够减小机械手90沿第二方向的整体尺寸,进而在确保机械手90具有足够强度的情况下,能够满足机械手90结构紧凑、体积较小的设计需求,扩大了机械手90的使用范围,适于推广应用。
179.其中,第二导向螺母930在第一方向的一侧或相对两侧设置有圆柱凸台931,通过圆柱凸台931与连杆机构950铰接,能够确保连杆机构950具有足够的运动范围,且相对于螺母灵活、顺畅转动。同时,圆柱凸台931便于加工,易于实现。
180.在本实用新型提供的一些可能实现的实施例中,如图28、图29和图30所示,连杆机构950包括第一杆951,第一杆951的第一端设置有滑槽9511,圆柱凸台931位于滑槽9511内并随第二导向螺母930的运动可在滑槽9511内移动,第一杆951的第二端通过第一铰接点9512与夹持部940铰接以带动夹持部940运动,第一杆951在第一端和第二端之间的部分通过第二铰接点9513与基座960铰接。由此,当第五驱动部910驱动第二螺杆920旋转的过程中,第二导向螺母930相对于第二螺杆920运动,通过圆柱凸台931和滑槽9511的配合能够带动两个第一杆951的第一端移动,由此,通过两个第一杆951能够带动对应连接在第一杆951的第二端的两个连杆机构950呈剪刀式闭合或打开,从而实现夹持部940的夹持和卸载功能。
181.其中,第一铰接点9512、第二铰接点9513、滑槽9511的几何中心可以不共线,或者,第一铰接点9512、第二铰接点9513、滑槽9511的几何中心也可以共线。
182.在上述实施例中,如图28和图29所示,连杆机构950还包括:第二杆952,第二杆952的第一端通过第三铰接点9521与夹持部940铰接,第二杆952的第二端通过第四铰接点9522
与基座960铰接;其中,第一铰接点9512、第二铰接点9513、第三铰接点9521、第四铰接点9522形成的图形为平行四边形。即连杆机构950为平行四连杆机构,平行四连杆机构结构简单、动平衡好,进而能够有利于提高机械手90工作的平稳性和可靠性。
183.具体地,第五驱动部910为电机,第五驱动部910安装在基座960上,基座960和第五驱动部910保持相对静止。第五驱动部910的第五输出轴与第二螺杆920连接,第五驱动部910驱动第二螺杆920旋转,能够使与第二螺杆920螺纹连接的第二导向螺母930沿第二螺杆920移动,举例而言,如第五驱动部910的第五输出轴驱动第二螺杆920正向旋转,能够使第二导向螺母930沿第二螺杆920向前移动,反之,第五驱动部910的第五输出轴驱动第二螺杆920反向旋转,能够使第二导向螺母930沿第二螺杆920向后移动。
184.由于第二导向螺母930的圆柱凸台931能够沿连杆机构950的第一杆951的滑槽9511移动,因此,第二导向螺母930沿第二螺杆920移动的过程中,能够通过第一杆951对连杆机构950施力,由于第一杆951与夹持部940通过第一铰接点9512铰接,第一杆951与基座960通过第二铰接点9513铰接;第二杆952通过第三铰接点9521与夹持部940铰接,第二杆952通过第四铰接点9522与基座960铰接,连杆机构950为平行四连杆机。因此,第二导向螺母930沿第二螺杆920前后移动,通过第一杆951能够带动两个连杆机构950呈剪刀式闭合或打开,从而实现夹持部940的夹持和卸载功能。
185.在上述实施例中,如图29和图31所示,第一杆951设置有弯折结构953,弯折结构953位于第二铰接点9513和滑槽9511之间,两个连杆机构950的弯折结构953向远离彼此的方向弯折。这样的设置,在第一方向上,两个第一杆951的滑槽9511之间的距离大于两个第一杆951的第二铰接点9513之间的距离,因此,在两个第一杆951和第二导向螺母930叠设在一起后,在第一方向上,两个第一杆951的第二铰接点9513之间的距离较小,使得机械手90的结构紧凑,减小了机械手90在第一方向的整体尺寸,能够满足机械手90结构紧凑、体积较小的设计需求。
186.具体地,如图31所示,两个圆柱凸台931在第一方向上分布在第二导向螺母930的两侧,位于第二导向螺母930上方的第一杆951的弯折结构953向上,位于第二导向螺母930下方的第一杆951的弯折结构953向下,因此,当两个第一杆951通过滑槽9511与第二导向螺母930的圆柱凸台931铰接后,两个第一杆951从上下两个方向与第二导向螺母930叠设在一起,由此,可以减小两个第一杆951远离弯折结构953的部分在第一方向的高度差,使得两个第一杆951的第二铰接点9513在第一方向的高度差较小或平行设置,使得机械手90的结构紧凑,同时,有利于两个夹持部940受力均衡,平稳夹持。
187.在本实用新型提供的一些可能实现的实施例中,如图31和图32所示,机械手90还包括止推垫片921,基座960上设置有供第二螺杆920远离第五驱动部910的一端插设的滑动孔,第二螺杆920的周侧设置有位于滑动孔外部的阶梯部,止推垫片921位于滑动孔的端面和阶梯部之间。
188.其中,当机械手90动作使两个夹持部940相互靠近而夹持物体时,或者,当机械手90动作使两个夹持部940相互靠近至极限位置时,第二螺杆920的轴向力能够加载在该止推垫片921上,此时,第五驱动部910不承受该轴向力,从而对第五驱动部910起到了良好的保护作用,避免了两个夹持部940相互靠近至极限位置后继续相互靠近而使第二螺杆920损坏的问题,有利于延长第五驱动部910的使用寿命,提高机械手90的可靠性。
189.在本实用新型提供的一些可能实现的实施例中,如图30所示,基座960包括:沿第一方向分布的第一盖板961和第二盖板962,第一盖板961和第二盖板962的一部分相互连接并合围成用于容纳第五驱动部910的腔室,第一盖板961和第二盖板962的另一部分之间设置有缝隙,第二导向螺母930和部分连杆机构950位于缝隙内。
190.即第五驱动部910安装在第一盖板961和第二盖板962围成的腔室的内部,使得第一盖板961和第二盖板962对第五驱动部910起到了良好的保护作用。第二导向螺母930和部分连杆机构950位于第一盖板961和第二盖板962之间的缝隙内。由此,利用第一盖板961和第二盖板962对第二导向螺母930和部分连杆机构950起到了良好的保护作用,有利于提高机械手90的可靠性,同时,有利于提高机械手90外观的美观性和整洁性,并且,第一盖板961和第二盖板962之间的缝隙的设置,为第二导向螺母930和部分连杆机构950提供了足够的运动空间。
191.具体地,第一盖板961和第二盖板962可以通过螺栓、卡接等方式进行可拆卸连接,以方便对位于两个盖板之间的第二导向螺母930、连杆机构950进行维修,操作方便。
192.在本实用新型提供的一些可能实现的实施例中,如图27、图29和图30所示,机械手90还包括:第六驱动部970、传动机构980和第一摄像装置990,第六驱动部970设置于基座960上,传动机构980与第六驱动部970和第一摄像装置990连接,第六驱动部970用于驱动传动机构980以带动第一摄像装置990相对于基座960转动。
193.本实用新型实施例提供的机械手90,增设了第一摄像装置990,使得机械手90具有原本的夹持物体的功能的情况下,利用第一摄像装置990,能够对机械手90附近的环境进行图像采集,实现了机械手90功能的多元化,适于推广应用。
194.进一步地,第六驱动部970通过传动机构980能够带动第一摄像装置990相对于基座960本体转动,进而能够改变第一摄像装置990的拍摄视角,以增大第一摄像装置990的采集范围,扩大机械手90的使用范围,同时,能够使第一摄像装置990处于合理位置以避让障碍物、保护摄像头992,有利于降低第一摄像装置990的故障率,提高产品的可靠性。
195.进一步地,通过第六驱动部970驱动传动机构980带动第一摄像装置990相对于基座960转动,简化了人工手动调节第一摄像装置990的拍摄视角的问题,提高了机械手90的智能化。
196.在上述实施例中,第一摄像装置990的一端通过第二转轴982与基座960转动连接;传动机构980包括第三螺杆983、第三导向螺母984和连杆981,第三螺杆983与第三导向螺母984螺纹连接,并与第六驱动部970连接,连杆981的第一端与第三导向螺母984铰接,连杆981的第二端与第一摄像装置990远离第二转轴982的部分铰接;由此,第六驱动部970驱动第三螺杆983旋转,能够使第三导向螺母984相对于第三螺杆983运动以通过连杆981带动第一摄像装置990绕第二转轴982翻转,以实现第一摄像装置990相对于基座960的转动。其中,第六驱动部970可以为电机,电机能够驱动第三螺杆983正向或反向旋转,以实现第一摄像装置990相对于基座960正向或反向翻转。具体地,通过第六驱动部970、第三螺杆983、第三导向螺母984、连杆981、第二转轴982相配合,即可驱动第一摄像装置990相对于基座960转动,结构简单,操作方便,且体积较小,能够满足机械手90结构紧凑的设计需求。
197.具体地,第一摄像装置990包括摄像支架991和摄像头992,摄像支架991与基座960通过第二转轴982连接,摄像支架991与连杆981铰接,摄像头992安装在摄像支架991上,由
此,第六驱动部970通过传动机构980驱动摄像支架991相对于基座960翻转的过程中,使得摄像头992相对于基座960实现了转动,进而能够实现不同的视角。
198.进一步地,第一摄像装置990的最大翻转角度可以为180
°
,第一即摄像装置相对于基座960能够实现0至180
°
任一位置的翻转,可以理解的是,摄像装置的最大翻转角度也可以为200
°
、270
°
、300
°
或其他角度值。
199.如图33和图34所示,在本实用新型提供的一些可能实现的实施例中,传动机构980还包括连接块985,连接块985与第三导向螺母984固定连接,并与连杆981铰接。连接块985的设置,能够便利、可靠地将连杆981与第三导向螺母984铰接。
200.其中,连接块985的一侧可以通过焊接固定在第三导向螺母984上,或者,连接块985可以通过螺栓结构、卡接等方式固定在第三导向螺母984上,连接块985远离第三导向螺母984的一侧可以设置有圆形凸柱,连杆981的第一端可以通过圆孔套设在圆形凸柱的外侧,以实现连杆981与连接块985的铰接连接。
201.如图29、图30、图33和图34所示,传动机构980还包括滑竿986,滑竿986与第三螺杆983平行设置,并固定在基座960上,滑竿986穿设于第三导向螺母984,用于对第三导向螺母984的移动进行限位。
202.也就是说,第三导向螺母984上开设有螺纹孔和通孔,第三导向螺母984通过螺纹孔与第三螺杆983螺纹连接并可以在第三螺杆983旋转的情况下沿第三螺杆983移动,第三导向螺母984通过通孔与滑竿986滑动连接,使得第三导向螺母984在沿第三螺杆983移动的过程中,在通孔和滑竿986的限定下,第三导向螺母984同时会沿滑竿986滑动。因此,滑竿986的设置,能够提高第三导向螺母984沿第三螺杆983移动的精度和准确性,降低了第三导向螺母984在移动过程中晃动现象的发生,进而提高第一摄像装置990相对于基座960翻转的稳定性和准确性,有利于确保第一摄像装置990的拍摄质量。
203.在本实用新型提供的一些可能实现的实施例中,两个夹持部940之间形成有避让空间941,第一摄像装置990相对于基座960能够翻转至避让空间941的上方。由此,当第一摄像装置990相对于基座960翻转至避让空间941的上方时,若第一摄像装置990的摄像头992朝向避让空间941,则透过避让空间941,第一摄像装置990能够对避让空间941下方的视角进行图像采集,进一步增大了摄像装置的采集范围。
204.如图35至图42所示,本实用新型提供的一些实施例中,还提供了另一种机械手90’的结构,可以理解的是,本实施例提供的机械手90’仍可以通过连接轴901’与第四机械关节的第四输出轴412连接,其具体连接方式与图27至图34所示的机械手90相同,在此不具体解释。
205.如图35至图42所示,本实用新型实施例提供的机械手90’包括:基座960’,基座960’开设有开口朝上的收纳槽963’;主驱动部910’和两个夹持部940’,设置在基座960’上并位于收纳槽963’的外部,主驱动部910’与两个夹持部940’传动连接,以驱动两个夹持部940’相互靠近或远离;副驱动部970’和第一摄像装置990’,副驱动部970’设置在收纳槽963’内,副驱动部970’与第一摄像装置990’传动连接,以驱动第一摄像装置990’翻转至容纳在收纳槽963’内或位于收纳槽963’外。
206.如图36、图40和图41所示,本实用新型实施例提供的机械手90’,通过主驱动部910’驱动两个夹持部940’相互靠近或远离,以实现机械手90’的抓取或放开的操作。同时,
增设了第一摄像装置990’,使得机械手90’具有原本的夹持物体的功能的情况下,利用第一摄像装置990’,能够对机械手90’附近的环境或物体进行探测,如第一摄像装置990’能够实现测距或建图,或对物体、颜色进行识别,进而实现了机械手90’功能的多元化,适于推广应用。
207.进一步地,副驱动部970’与第一摄像装置990’传动连接以驱动第一摄像装置990’翻转,进而能够改变第一摄像装置990’的拍摄视角,以增大第一摄像装置990’的探测范围,扩大机械手90’的使用范围。同时,机械手90’的基座960’上开设有收纳槽963’,第一摄像装置990’在副驱动部970’的驱动下,能够翻转至容纳在收纳槽963’内或位于收纳槽963’外,以满足第一摄像装置990’不同拍摄视角的需求,同时,将第一摄像装置990’容纳在收纳槽963’,与相关技术中第一摄像装置连接在机械手的外壁相比,有利于减小机械手在厚度方向的整体尺寸,能够满足机械手90’结构紧凑的设计需求。其中,机械手90’的顶部和底部的方向如图38和图40中的箭头所示,机械手90’的厚度方向即为机械手90’的顶部至底部的方向。
208.进一步地,通过副驱动部970’驱动第一摄像装置990’相对于基座960’翻转,简化了人工手动调节第一摄像装置990’的拍摄视角的问题,提高了机械手90’的智能化。
209.可以理解的是,基座960’可以与机械臂001的工作臂80连接,具体地,基座960’与工作臂80通过第四机械关节40转动连接,第四机械关节40的具体机构,后文会详细介绍。
210.在本实用新型提供的一些可能实现的实施例中,第一摄像装置990’包括摄像头992’。其中,摄像头992’包括tof摄像头和rgb摄像头,tof摄像头包括发射端和接收端,tof摄像头可单独用于测距或建图,或是与自移动清洁设备的lds或其他光学建模传感器配合建立3d地图模型。rgb摄像头可用识别物体和颜色。
211.进一步地,如图36、图37、图38和图39所示,第一摄像装置990’包括容纳在收纳槽963’内的第一极限位置,第一极限位置时,第一摄像装置990’的顶部低于基座960’的上表面,摄像头992’朝上。
212.其中,第一极限位置可以理解为第一摄像装置990’的初始位置,如第一摄像装置990’的零点位置,当第一摄像装置990’处于第一极限位置时,第一摄像装置990’是容纳在收纳槽963’内的,且基座960’的上表面突出于第一摄像装置990’的顶部。这样的设置,使得基座960’对第一摄像装置990’起到了良好的保护作用,避免障碍物刮碰第一摄像装置990’的问题,有利于保护摄像头992’,降低第一摄像装置990’的故障率,提高产品的可靠性。同时,在第一摄像装置990’处于第一极限位置时摄像头992’朝上,因此,当机械臂001收纳在容纳腔011时,利用摄像头992’可建向上的地图,配合自移动清洁设备的lds或其他光学建模传感器,可建立3d地图模型,进而有利于提高自移动清洁设备地图建立的可靠性,并且,可以在一定程度上简化自移动清洁设备的传感器的设置。
213.进一步地,如图41和图42所示,第一摄像装置990’包括位于相互远离的两个夹持部940’之间的第二极限位置,第二极限位置时,第一摄像装置990’的摄像头992’朝下。
214.其中,第二极限位置可以理解为第一摄像装置990’的最大翻转位置,当第一摄像装置990’翻转到第二极限位置时,在两个夹持部940’分离的情况下,第一摄像装置990’位于两个夹持部940’之间,使得第一摄像装置990’合理利用两个夹持部940’分离后形成的空间,以实现收纳功能,有利于减小机械手90’整体占用的空间,便于收纳,且利用两个夹持部
940’从两侧对第一摄像装置990’起到了良好的保护作用,避免障碍物从侧面撞击第一摄像装置990’,有利于提高第一摄像装置990’的使用寿命。同时,当第一摄像装置990’处于第二极限位置时,摄像头992’朝下,由此,当机械臂001收纳在容纳腔011时,可避免灰尘沉积在摄像头992’上,有利于提高摄像头992’的清洁性,进而有利于提高第一摄像装置990’采集信息的准确性。
215.具体地,第一摄像装置990’的翻转角度可以为180
°
,可为机械臂提供更大的视角。
216.如图36、图37、图38和图42所示,在本实用新型提供的一些可能实现的实施例中,第一摄像装置990’还包括:摄像支架991’,摄像头992’安装在摄像支架991’上,摄像支架991’远离摄像头992’的端部与副驱动部970’的输出轴连接,副驱动部970’转动带动摄像支架991’翻转。
217.在该实施例中,副驱动部970’可以为电机,摄像支架991’与副驱动部970’的输出轴连接,如摄像支架991’的一端套设在副驱动部970’的输出轴上,使得副驱动的输出轴转动,带动摄像支架991’相对于基座960’翻转,由于摄像头992’安装在摄像支架991’上,进而使得摄像头992’相对于基座960’翻转,以实现第一摄像装置990’的翻转操作,结构简单,体积较小,成本较低。
218.其中,如图41和图42所示,摄像支架991’在摄像头992’和副驱动部970’之间的部分还设置有避让折弯993’,避让折弯993’用于在第一摄像装置990’处于第二极限位置时避让基座960’。也就是说,副驱动部970’动作将第一摄像装置990’由第一极限位置翻转至第二极限位置的过程中,摄像头992’由收纳槽963’内翻转至收纳槽963’外,并位于相互分离的两个夹持部940’之间,即摄像头992’实现180
°
翻转。而避让折弯993’的设置,使得摄像支架991’能够避开收纳槽963’的侧壁,进而避免摄像支架991’与收纳槽963’的侧壁干涉而影响摄像支架991’的转动范围,进而能够确保第一摄像装置990’能够顺利翻转至第二极限位置,且第一摄像装置990’在第一极限位置时,其顶部低于收纳槽963’的上表面。
219.如图36、图37和图41所示,在本实用新型提供的一些可能实现的实施例中,机械手90’还包括:分布在收纳槽963’外部两侧的第一连杆机构953’和第二连杆机构954’,第一连杆机构953’和第二连杆机构954’之间通过主齿轮组955’传动连接,且均与基座960’和对应的夹持部940’铰接。也就是说,第一连杆机构953’与基座960’和一个夹持部940’铰接,第二连杆机构954’与基座960’和另一个夹持部940’铰接,且第一连杆机构953’和第二连杆机构954’之间通过主齿轮组955’传动连接。由此,通过主驱动部910’与第一连杆机构953’传动连接,主驱动部910’驱动第一连杆机构953’运动,第一连杆机构953’通过主齿轮组955’带动第二连杆机构954’运动,进而驱动两个夹持部940’相互靠近或远离,以实现机械手90’的抓取或放开的操作,结构简单,成本较低。
220.进一步地,由于主驱动部910’与第一连杆机构953’传动连接,第一连杆机构953’通过主齿轮组955’将动力传递至第二连杆机构954’,使得主驱动部910’能够较为集中的靠近第一连杆机构953’设置,进而能够避让收纳槽963’以及第一摄像装置990’,能够满足机械手90’结构紧凑的设计需求。
221.在上述实施例中,如图37和图42所示,第一连杆机构953’的第一杆951’和第二连杆机构954’的第一杆951’分布在收纳槽963’远离主驱动部910’的一侧,第一杆951’的第一端通过第一铰接点9511’铰接于基座960’,且第一连杆机构953’的第一杆951’的第一端和
第二连杆机构954’的第一杆951’的第一端通过主齿轮组955’传动连接,第一杆951’的第二端通过第二铰接点9512’铰接于夹持部940’。
222.进一步地,第一连杆机构953’的第二杆952’和第二连杆机构954’的第二杆952’分布在收纳槽963’外部的两侧,第二杆952’的第一端通过第三铰接点9521’铰接于基座960’,第二杆952’的第二端通过第四铰接点9522’铰接于夹持部940’;其中,第一铰接点9511’、第二铰接点9512’、第三铰接点9521’、第四铰接点9522’形成的图形为平行四边形,即第一连杆机构953’和第二连杆机构954’均为平行四连杆机构,平行四连杆机构结构简单、动平衡好,进而能够有利于提高机械手90’工作的平稳性和可靠性。
223.其中,主驱动部910’与第一连杆机构953’的第二杆952’传动连接,由此,主驱动部910’动作,能够带动第一连杆机构953’的第二杆952’转动,进而使得与第一连杆机构953’连接的夹持部940’动作,并带动第一连杆机构953’的第一杆951’转动,通过主齿轮组955’,将动力传递至第二连杆机构954’,以带动第二连杆机构954’的第一杆951’转动,进而能够带动与第二连杆机构954’连接的另一个夹持部940’转动,实现两个夹持部940’的相互靠近或远离,结构简单,操作方便。
224.如图37和图42所示,在本实用新型提供的一些可能实现的实施例中,机械手90’还包括:第二螺杆920’和第二导向螺母930’,第二螺杆920’与第二导向螺母930’螺纹连接,并与主驱动部910’连接,第二导向螺母930’上设置有圆柱凸台931’;第一连杆机构953’的第二杆952’的第一端至第二端的方向开设有滑槽9523’,圆柱凸台931’位于滑槽9523’内并随第二导向螺母930’的运动可在滑槽9523’内移动。由此,当主驱动部910’驱动第二螺杆920’旋转的过程中,第二导向螺母930’相对于第二螺杆920’运动,通过圆柱凸台931’和滑槽9523’的配合能够带动第一连杆机构953’的第二杆952’的第二端相对于第一端转动,即能够驱动第二杆952’转动,进而能够带动与第一连杆机构953’连接的夹持部940’转动,以带动第一连杆机构953’的第一杆951’的第二端相对于第一端转动,即第一连杆机构953’的第一杆951’转动。由此,第一连杆机构953’的第一杆951’能够驱动主齿轮组955’转动,以带动第二连杆机构954’转动,使得第一连杆机构953’和第二连杆机构954’呈剪刀式闭合或打开,从而实现夹持部940’的夹持和卸载功能。
225.其中,第二螺杆920’体积细长,在第二螺杆920’的径向方向占用的空间较小,因此,通过第二螺杆920’和第二导向螺母930’连接主驱动部910’和第一连杆机构953’,使得第二螺杆920’可以靠近第一连杆机构953’设置,或者靠近基座960’的边缘设置,以避让收纳槽963’和第一摄像装置990’,满足机械手90’结构紧凑的设计需求。
226.如图37和图42所示,在本实用新型提供的一些可能实现的实施例中,机械手90’还包括:弹性复位件980’,连接在第二连杆机构954’的第二杆952’的第一端和基座960’之间,弹性复位件980’用于向第二连杆机构954’施加远离第一连杆机构953’的转向力。
227.也就是说,当主驱动部910’不工作的情况下,在弹性复位件980’的作用下,第二连杆机构954’向远离第一连杆机构953’的方向转动,即第一连杆机构953’和第二连杆机构954’呈剪刀式打开,使得两个夹持部940’相互远离。当主驱动部910’工作时,主驱动部910’带动第一连杆机构953’动作,使第一连杆机构953’向靠近第二连杆机构954’的方向转动,即第一连杆机构953’和第二连杆机构954’呈剪刀式闭合,使得两个夹持部940’相互靠近。其中,弹性复位件980’的设置,使得机械手90’能够在夹持和卸载动作之间进行切换,也满
足不同功能。
228.具体地,弹性复位件980’为扭簧,扭簧连接在基座960’和第二连杆机构954’的第一端之间。如图37所示,扭簧为第二连杆机构954’施加顺时针的转向力,以使第二连杆机构954’远离第一连杆机构953’。
229.如图37、图39和图42所示,在本实用新型提供的一些可能实现的实施例中,机械手90’还包括:副齿轮组912’,主驱动部910’的输出轴与第二螺杆920’通过副齿轮组912’传动连接,第二螺杆920’位于收纳槽963’靠近第一连杆机构953’的一侧。
230.其中,通过副齿轮组912’能够改变主驱动部910’与第二螺杆920’的传动方向,使得第二螺杆920’可以避开收纳槽963’和第一摄像装置990’设置,如第二螺杆920’可以靠近基座960’的边缘设置,由此,为收纳槽963’留出了设置空间、为第一摄像装置990’留出了翻转空间,能够确保第一摄像装置990’顺利在第一极限位置和第二极限位置之间进行翻转,以确保机械手90’具有较大的拍摄视角,同时,使得机械手90’的结构紧凑,体积较小。
231.也就是说,本实用新型实施例提供的机械手90’,主驱动部910’工作,经过副齿轮组912’带动第二螺杆920’转动,由于第二螺杆920’上的第二导向螺母930’相对于第二螺杆920’运动,通过第二导向螺母930’上的圆柱凸台931’和第一连杆机构953’上的滑槽9523’的配合,能够带动第一连杆机构953’转动,第一连杆机构953’通过主齿轮组955’,驱动第二连杆机构954’转动,使得第一连杆机构953’和第二连杆机构954’呈剪刀式闭合或打开,从而实现夹持部940’的夹持和卸载功能。同时,这样的设置,能够避让第一摄像组件和收纳槽963’,使得机械手90’的结构紧凑。
232.如图38和图40所示,本实用新型提供的一些可能实现的实施例中,基座960’包括:第一盖板961’和第二盖板962’,第一盖板961’和第二盖板962’的一部分相互连接并合围成用于容纳主驱动部910’的腔室,第一盖板961’和第二盖板962’的另一部分之间设置有缝隙,第二导向螺母930’和第二螺杆920’位于缝隙内。
233.即主驱动部910’安装在第一盖板961’和第二盖板962’围成的腔室的内部,使得第一盖板961’和第二盖板962’对主驱动部910’起到了良好的保护作用。第二导向螺母930’和第二螺杆920’位于第一盖板961’和第二盖板962’之间的缝隙内。由此,利用第一盖板961’和第二盖板962’对第二导向螺母930’和第二螺杆920’起到了良好的保护作用,有利于提高机械手90’的可靠性,同时,有利于提高机械手90’外观的美观性和整洁性,并且,第一盖板961’和第二盖板962’之间的缝隙的设置,为第二导向螺母930’和第二螺杆920’提供了足够的运动空间。具体地,部分第一连杆机构953’和部分第二连杆机构954’也可以位于第一盖板961’和第二盖板962’之间的缝隙内。
234.其中,第一盖板961’位于第二盖板962’的上方,第一盖板961’上开设有收纳槽963’,使得第一摄像装置990’能够由基座960’的顶部翻转至位于收纳槽963’内,并由基座960’的顶部翻转至为位于分离的两个夹持部940’之间。具体地,第一盖板961’和第二盖板962’可以通过螺栓、卡接等方式进行可拆卸连接,以方便对位于两个盖板之间的第二导向螺母930’、第二螺杆920’、第一连杆机构953’、第二连杆机构954’进行维修,操作方便。
235.如图1、图2、图3所示,本实用新型实施例提供的自移动清洁设备002,包括:设备本体010和机械臂001,设备本体010包括容纳腔011,设备本体010的底部呈三角形分布有两个主动轮020和从动轮030,机械臂001可折叠的容置于容纳腔011内,其中,容纳腔011内设置
有用于安装机械臂001的安装结构,安装结构在水平面内的投影位于三角形在水平面内的投影的内部。
236.在该实施例中,机械臂001通过设置在容纳腔011内的安装结构与设备本体010的容纳腔011连接,即机械臂001通过安装结构安装在设备本体010的容纳腔011内,使得机械臂001可随设备本体010的移动而移动,进而能够随设备本体010达到待工作位置。通过机械臂001可折叠容纳在容纳腔011内,使得机械臂001折叠后收纳在容纳腔011内,而处于折叠状态的机械臂001占用的空间较小,体积较小,便于收纳,同时,由于容纳腔011设置在设备本体010上,使得充分利用设备本体010的结构,即可实现机械臂001的收纳,结构简单,能够满足自移动清洁设备002结构紧凑、体积较小的设计需求。
237.其中,驱动系统包括两个主动轮020和一个从动轮030,两个主动轮020和一个从动轮030呈三角形分布在设备本体010的底部,其中,三角形区域如图3所示的p所在的三角形区域,这样的设置,能够实现设备本体010的移动,且能够使设备本体010在移动过程中具有良好的稳定性。通过容纳腔011内设置的用于安装机械臂001的安装结构在水平面内的投影位于三角形在水平面内的投影的内部,说明机械臂001在设备本体010的安装位置在两个主动轮020和从动轮030形成的三角区域内,这样的设置,使得自移动清洁设备002能够达到比较好的重心,即自移动清洁设备002的重心能够与两个主动轮020、一个从动轮030构成的支撑中心重合或距离较小,以确保自移动清洁设备002工作的稳定性和可靠性,并能够避免机械臂001安装在三角形区域外容易导致设备本体010翻转的情况发生。
238.如图3所示,在本实用新型提供的一些可能实现的实施例中,两个主动轮020沿设备本体010的横向分布,机械臂001靠近两个主动轮020设置。由此,能够在确保自移动清洁设备002具有较好稳定性和可靠性的情况下,尽量增大机械臂001的水平尺寸,以提高机械臂001的强度。
239.其中,通常情况下,两个主动轮020沿设备本体010的横向分布在设备本体010的靠近中间的位置处,而从动轮030分布在设备本体010底部的前端,即两个主动轮020之间的距离大于从动轮030与主动轮020之间的距离。因此,将容纳腔011靠近两个主动轮020设置,将机械臂001靠近两个主动轮020设置,使得机械臂001的水平尺寸(如长度)能够较大,即能够增大机械臂001与容纳腔011的连接面积,进而使得机械臂001能够稳定、可靠地连接在设备本体010的容纳腔011上,这样,机械臂001展开工作时,能够降低因机械臂001展开范围较大而使设备本体010发生翻转的情况,进而能够提高自移动清洁设备002工作的稳定性和安全性,提高用户使用的满意度。
240.如图2所示,在本实用新型提供的一些可能实现的实施例中,当机械臂001可折叠的容置在容纳腔011内时,机械臂001远离主动轮020和/或从动轮030的一端不高于设备本体010的上表面。
241.也就是说,机械臂001可折叠的容纳在容纳腔011的内部时,机械臂001不会突出于设备本体010的上表面,即该姿态的机械臂001并不会增加设备本体010的高度,因此,能够避免机械臂001突出于设备本体010的上表面导致突出的部分与障碍物碰撞而使自移动清洁设备002的移动范围受限的问题,即折叠容置在容纳腔011内的机械臂001,并不会影响自移动清洁设备002的原有移动范围。由此,本实用新型实施例提供的自移动清洁设备002,在增加机械臂001以扩大自移动清洁设备002的功能的情况下,并不会影响自移动清洁设备
002的原有功能。
242.在本实用新型提供的一些可能实现的实施例中,如图1所示,自移动清洁设备002还包括:第二摄像装置050,设置在设备本体010的前方;控制系统060,用于根据第一摄像装置990和第二摄像装置050的采集信息,识别障碍物并控制机械臂001的工作状态以对障碍物进行抓取和卸装。
243.其中,第二摄像装置050可以为自移动清洁设备002原有的摄像装置,由此,利用第一摄像装置990和第二摄像装置050相配合,并结合ai算法可识别出自移动清洁设备002附近的障碍物,及其抓取点空间姿位坐标,以对障碍物进行搬移或清理。
244.进一步地,如图35所示,自移动清洁设备002还包括处理系统070,处理系统070与控制系统060交互,控制系统060与机械臂001的第一驱动部110、第二驱动部220、两个第三机械关节30的第三驱动部、第四驱动部410、第五驱动部910、第六驱动部970电连接,处理系统070获取第一摄像装置990和第二摄像装置050的采集信息,结合各个转角检测装置的检测结构,根据运动学解算算法进行处理,且将解算结果传递给控制系统060,通过控制系统060下发指令给个驱动部,以驱动各个驱动部运动至目标位置,进而使得机械臂001能够达到目标位置,以执行对应的操作。可以理解的是,只有第一驱动部110是设置在底座50上,其他第二驱动部220、两个第三机械关节30的第三驱动部、第四驱动部410、第五驱动部910、第六驱动部970对应分布在机械臂001的支撑臂60、连接臂70和工作臂80上。
245.进一步地,控制系统060还可以利用第一摄像装置990的部分视场查看和测量夹持部940与障碍物之间的距离,以实现夹持部940的部分逻辑判断,进而提高夹持部940夹持障碍物的准确性和可靠性。
246.如图35所示,第一摄像装置990的视场可以分为c1副视场和c2主视场,其中,c1的角度小于c2,如c1与c2的比值为1:4,可以理解的是,c1与c2的比值也可以为其他数值。c1副视场能够辐射至大部分夹持部,进而利用第一摄像装置990的c1副视场即可查看和测量夹持部940与障碍物之间的距离;利用第一摄像装置990的c1副视场可以查看夹持部940与周围环境的距离信息,以便于控制机械臂合理运动以准确夹持物体。
247.在本实用新型提供的一些可能实现的实施例中,控制系统060还用于:在机械臂001处于工作姿态时,控制第二机械关节20使支撑臂60相对于旋转座55展开至垂直于底座50;在自移动清洁设备002构建地图或机械臂001处于非工作姿态时,控制机械臂001动作并折叠收纳在容纳腔011内。
248.也就是说,机械臂001在工作时,机械臂001的支撑臂60相对于底座50垂直设置,即支撑臂60完全竖起,这样的设置,能够减小机械臂001对导航系统的影响,进而提高自移动清洁设备002工作的可靠性。
249.在自移动清洁设备002创建地图时,控制系统060可以控制机械臂001动作并折叠收纳在容纳腔011内,即机械臂001收纳在容纳腔011内,这样的设置,能够避免机械臂001伸出容纳腔011而影响激光传感器工作,同时能够避免机械臂001伸出容纳腔011而撞到障碍物,进而提高自移动清洁设备002的可靠性。
250.在机械臂001处于非工作姿态时,如不需要利用机械臂001抓取障碍物时,控制系统060可以控制机械臂001动作并折叠收纳在容纳腔011内,即机械臂001收纳在容纳腔011内,这样的设置,能够避免机械臂001伸出容纳腔011而影响自移动清洁设备002执行清洁、
充电等其他工作,确保自移动清洁设备002的其他操作能够可靠进行。可以理解的是,上述障碍物也可以为用户需求的物体,如遥控器、苹果等,在此不再一一列举。
251.本实用新型已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于举例和说明的目的,而非意在将本实用新型限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本实用新型并不局限于上述实施例,根据本实用新型的教导还可以做出更多种的变型和修改,这些变型和修改均落在本实用新型所要求保护的范围以内。本实用新型的保护范围由附属的权利要求书及其等效范围所界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。