1.本发明涉及手、机器人、机器人系统以及手的控制方法。
背景技术:
2.至今为止,用两个手指握持工件的机器人手被众所周知。例如,在专利文献1中公开的机器人手包括支撑两个手指的共通的框架。并且,在专利文献1的机器人手中,通过弹性支撑框架,来吸收载置有工件的工作台和手指接触时的冲击。
3.专利文献1:日本实用新型公开号5-6074号公报
技术实现要素:
4.在机器人中,如果提高手的动作的灵活性,则相应地减少连接有手的机器人臂的动作量。因此,机器人的控制变得简单。专利文献1中所述的手的减震机构也是提高手的动作的灵活性的因素之一,提高手的动作的灵活性还有很大的改进空间。
5.鉴于上述内容,本发明的技术的目的在于进一步提高手的动作的灵活性。
6.本发明的技术是包括基座、两个手指、开闭机构和弯曲机构的手,所述两手指从所述基座延伸且构成为可弯曲,所述开闭机构设置在所述基座,使所述两个手指向规定的开闭方向移动,以使所述两个手指握持工件,所述弯曲机构设置在所述基座,使所述两个手指弯曲。所述每个手指构成为具有第二部分和第一部分,所述第二部分从所述基座延伸,所述第一部分围绕与所述开闭方向平行的旋转轴可旋转地连接在所述第二部分,所述第一部分相对于所述第二部分弯曲。在所述第一部分设置有使所述第一部分向所述第一部分的延伸方向弹性伸缩的缓冲机构。
7.在上述技术中,由于在两个手指的每一个设置有缓冲机构,因此能够在各个手指独立发挥缓冲功能。并且,由于设置有弯曲机构,因此能够通过使手指弯曲,或使工件移动,或改变工件的握持姿势。并且,由于缓冲机构不是设置在第二部分而是设置在第一部分,因此第二部分不进行伸缩动作。另一方面,在弯曲机构中,能够经由第二部分配置用于使第一部分旋转的动力传递机构等。在设计这样的动力传递机构等时,由于无需考虑第二部分的伸缩动作,因此能够避免动力传递机构等甚至于弯曲机构的结构复杂化。并且,由于在第一部分设置有缓冲机构,因此缓冲方向根据手指的弯曲而发生变化。虽然冲击作用在第一部分的方向根据手的使用状况而各不相同,但存在有因缓冲方向追随第一部分而发生变化,使得冲击被适当吸收的情况。这样一来,能够进行手的各种动作。
8.本发明的其它技术是包括所述手和连接有所述手的机器人臂的机器人。
9.(发明效果)
10.在上述技术中,作为机器人,能够进行手的各种动作。因此,无需用机器人臂来对应,能够减少机器人臂的动作量。
11.根据所述手,能够进一步提高手的动作的灵活性。
12.根据所述机器人,能够进一步提高手的动作的灵活性。
附图说明
13.图1是示出了机器人系统的结构的示意图。
14.图2是手的正视图。
15.图3是图2的iii-iii线的手的剖面图。
16.图4是以第一手指的第一部分为中心的放大剖面图。
17.图5是图3的v-v线的第一手的剖面图。
18.图6是以第一手指的第二部分为中心的放大剖面图。
19.图7是在能够看见基座的内部的状态下从与第一手相反的一侧来看第二手的概略图,是第二手指处于完全张开状态的图。
20.图8是向轴方向从前进侧来看第二手指的概略图。
21.图9是以第二握持部为中心的概略的剖面图。
22.图10是在能够看见基座的内部的状态下从与第一手相反的一侧来看第二手的概略图,是第二手指处于完全闭合状态的图。
23.图11是以第二手指处于完全闭合状态的第二握持部为中心的概略的剖面图。
24.图12是在能够看见基座的内部的状态下从与第一手相反的一侧来看第二手的概略图,是第二手指处于完全张开状态,向轴方向前进的图。
25.图13是以缓冲机构为中心的放大剖面图。
26.图14是示出了轴承单元的概略结构的立体图。
27.图15是示出了底板的概略结构的立体图。
28.图16是示出了角钢的概略结构的立体图。
29.图17是示出了轴承座的概略结构的立体图。
30.图18是示出了通过第一握持部握持角钢的状态的概略图。
31.图19是示出了通过第一握持部将角钢放置在底板的状态的概略图。
32.图20是示出了通过第一握持部握持螺栓的状态的概略图。
33.图21是示出了第二握持部从第一握持部接受螺栓的状态的概略图。
34.图22是示出了第二握持部将螺栓拧入螺纹孔的状态的概略图。
35.图23是示出了通过第二握持部握持轴承座的状态的概略图。
36.图24是示出了通过第二握持部将轴承座插入角钢内的状态的概略图。
37.图25是从端面侧来看被插入角钢内的轴承座的一种状态的概略图,是示出了第一手指卡止在锪孔的状态的图。
38.图26是示出了通过第二握持部将螺栓拧入角钢的螺纹孔的状态的概略图。
39.图27是示出了通过第一握持部握持转轴的状态的概略图。
40.图28是示出了第二握持部从第一握持部接受转轴的状态的概略图。
41.图29是示出了通过第二握持部将转轴插入轴承座的轴承的状态的概略图。
42.图30是示出了通过第一握持部握持角钢的状态的概略图。
43.图31是示出了进行偏心握持的第一握持部的一个状态的概略图。
44.图32是示出了进行偏心握持的第一握持部的一个状态的概略图。
45.图33是示出了进行偏心握持的第一握持部的一个状态的概略图。
46.图34是示出了握持了角钢的第一握持部向上方移动的状态的概略图。
47.图35是示出了从端面侧来看被插入角钢的轴承座的一个状态的概略图,是示出了第一手指被按压在移动路径的起点的状态的图。
48.图36是图35的z1-z1线的角钢以及轴承座的剖面图。
49.图37是图25的z2-z2线的角钢以及轴承座的剖面图。
50.图38是示出了从端面侧来看被插入角钢的轴承座的一个状态的概略图,是示出了第一手指移动到移动路径的终点的状态的图。
51.图39是示出了图38的z3-z3线的角钢以及轴承座的剖面图。
52.图40是示出了第一手指被按压在工件的表面的状态的第一握持部的概略图。
53.图41是示出了第一手指卡止在工件的卡止部的状态的第一握持部的概略图。
54.图42是示出了第一手指接触到倾斜的载置台的状态的第一握持部的概略图。
55.图43是示出了第一手指握持了倾斜的载置台的工件的状态的第一握持部的概略图。
56.图44是示出了第一手指弯曲来将工件按压在安装板上的状态的第一握持部的概略图。
具体实施方式
57.以下,参照附图,对举例的实施方式进行详细说明。
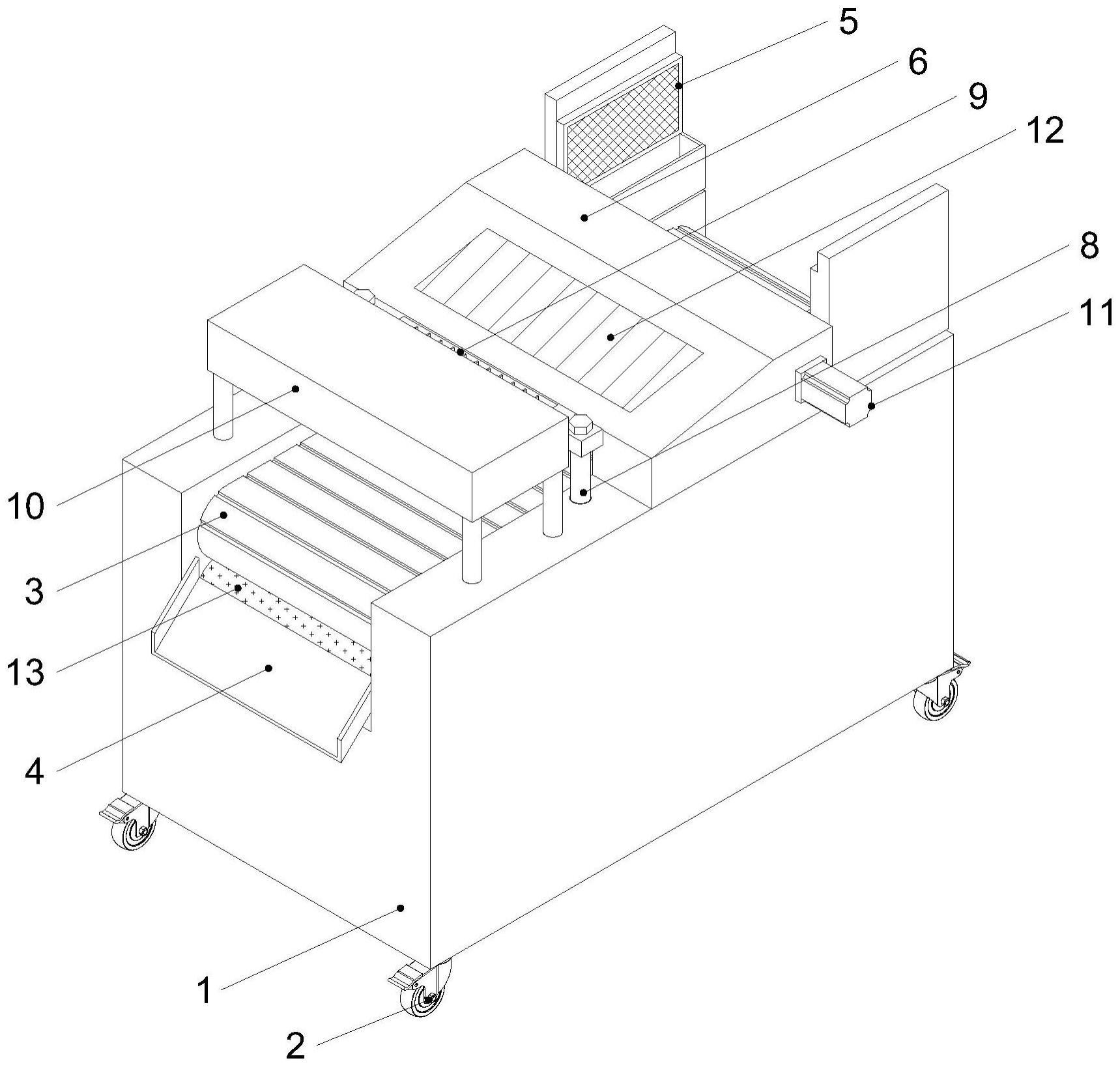
58.图1是示出了机器人系统1000的结构的示意图。
59.机器人系统1000包括机器人1100和控制部1200,所述控制部1200控制机器人1100。
60.机器人1100例如是工业用机器人。机器人1100具有机器人臂1110和手100,所述手100连接在机器人臂1110的前端。机器人1100通过机器人臂1110使手100动作即移动。手100是所谓的末端执行器的一种。手100握持工件w。并且,手100或重新拿起工件w,或将工件w组入其它工件等。
61.图2是手100的正视图。手100具有第一手h1和第二手h2。第一手h1和第二手h2设置在共通的基座1。第一手h1和第二手h2既能够分别单独执行处理,也能够协同执行处理。单独处理例如是第一手h1或第二手h2握持工件的处理。协同的处理例如是从第一手h1向第二手h2移交工件的处理、用第一手h1和第二手h2握持工件的处理。
62.=第一手=
63.第一手h1包括基座1和第一握持部2,所述第一握持部2设置在基座1。第一手h1通过第一握持部2执行对于工件的各种处理。
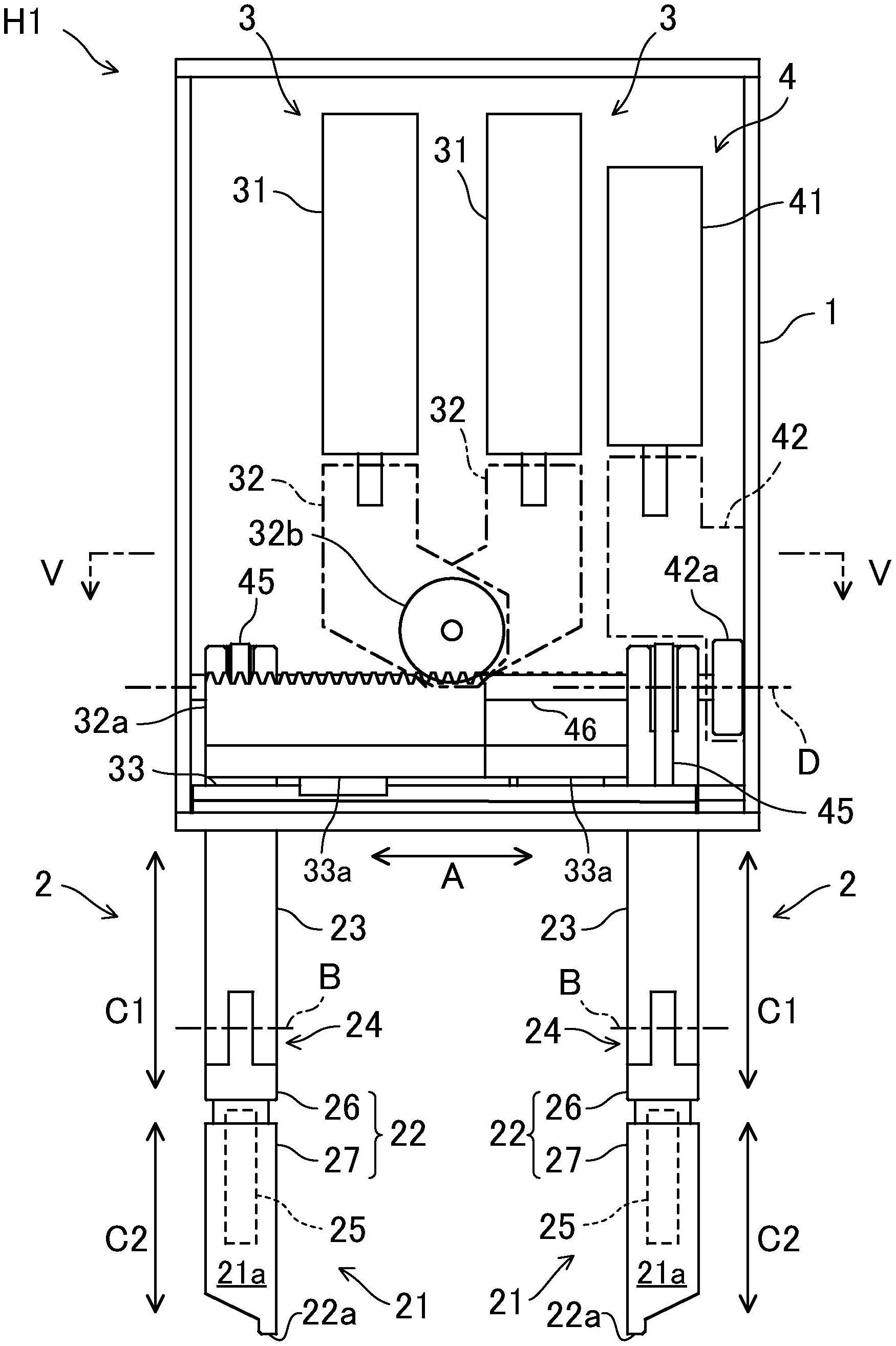
64.图3是图2的iii-iii线的手100的剖面图。也就是说,图3是在能够看见基座1的内部的状态下从第二手h2侧来看第一手h1的图。需要说明的是,在图3中,概略地示出了基座1的内部结构。
65.第一握持部2具有两个第一手指21、开闭机构3和弯曲机构4,所述两个第一手指21从基座1延伸,所述开闭机构3使两个第一手指21向规定的开闭方向a开闭,所述弯曲机构4使两个第一手指21弯曲。并且,每个第一手指21具有缓冲机构25,所述缓冲机构25吸收作用在每个第一手指21上的冲击。
66.两个第一手指21通过开闭机构3向开闭方向a彼此分离以及接近。因此,两个第一
手指21或握持工件,或释放工件的握持。在该例子中,开闭机构3使两个第一手指21独立动作。也就是说,第一手h1具有两个开闭机构3,所述两个开闭机构3分别对应于两个第一手指21。两个第一手指21构成为弯曲,通过弯曲机构4弯曲。弯曲机构4使两个第一手指21一起动作。第一手h1具有在两个第一手指21共通的一个弯曲机构4。开闭机构3以及弯曲机构4设置在基座1。
[0067]-第一手指-[0068]
如图2、图3所示,每个第一手指21具有前端侧的第一部分22和基座1侧的第二部分23。第一部分22和第二部分23用关节24连接着。第一部分22经由关节24围绕与开闭方向a平行的旋转轴b旋转。因此,第一手指21能够变为第一部分22相对于第二部分23弯曲的弯曲状态以及第一部分22和第二部分23呈一直线状延伸的延伸状态。
[0069]
第二部分23连接在基座1。第二部分23从基座1向与开闭方向a正交的延伸方向c1延伸。在第二部分23的前端设置有关节24。
[0070]
第一部分22具有固定部分26和可动部分27。固定部分26以及可动部分27排列为一直线状,向延伸方向c2延伸。固定部分26连接在关节24。可动部分27经由缓冲机构25以向延伸方向c2可移动的方式连接在固定部分26。可动部分27中的、在第一手指21的延伸状态中朝向第二手h2方向的面成为从第一手h1向第二手h2移交工件时支撑工件的支撑面21a。
[0071]
图4是以第一手指21的第一部分22为中心的放大剖面图。如图4所示,缓冲机构25具有滚珠花键28和弹簧29。滚珠花键28连接固定部分26和可动部分27。滚珠花键28能够使可动部分27相对于固定部分26向移动方向c2移动,使可动部分27不能围绕滚珠花键28的轴旋转。弹簧29以压缩状态设置在固定部分26与可动部分27之间。弹簧29向延伸方向c2伸缩。弹簧29向延伸方向c2按压可动部分27,使可动部分27为从固定部分26伸得最长的状态。通常,第一部分22像这样可动部分27成为从固定部分26伸得最长的状态(以下,称为“通常状态”)。滚珠花键28是引导部件的一个例子,弹簧29是弹性部件的一个例子。滚珠花键28具有滚动体,该滚动体通过滚动将可动部分27向延伸方向c2引导,弹簧29弹性按压可动部分27。
[0072]
另一方面,当冲击从可动部分27的前端22a(以下,还称为第一手指21的前端22a或第一部分22的前端22a)向延伸方向c2作用在可动部分27上时,可动部分27在延伸方向c2向固定部分26侧移动,弹簧29压缩变形。因此,冲击被弹簧29吸收。当冲击消失时,弹簧29伸长,可动部分27恢复到通常状态。
[0073]
像这样,第一手指21通过第一部分22围绕旋转轴b旋转而弯曲,通过第一部分22伸缩,来吸收向第一手指21作用的冲击。
[0074]-开闭机构-[0075]
图5是图3的v-v线的第一手h1的剖面图。图6是以第一手指21的第二部分23为中心的放大剖面图。需要说明的是,在图5中,部分省略了开闭机构3的齿轮系32以及弯曲机构4的齿轮系42的图示。
[0076]
如图3、图5所示,每个开闭机构3具有第一马达31、齿轮系32和引导件33,所述齿轮系32传递第一马达31的驱动力,所述引导件33将第一手指21向开闭方向a引导。两个开闭机构3被配置为在基座1内互不干扰。
[0077]
第一马达31例如是伺服马达,设置有编码器。并且,在第一马达31的驱动器设置有电流传感器。
[0078]
第一手指21可滑动地连接在引导件33。具体而言,引导件33在向开闭方向a延伸的状态下被设置在基座1。在引导件33可滑动地设置有块33a。第一手指21的第二部分23被安装在块33a。
[0079]
齿轮系32将第一马达31的驱动力向第一手指21传递。例如,齿轮系32包含形成齿轮齿条的齿条32a和传动齿轮32b。齿条32a被安装在块33a。此时,齿条32a向开闭方向a延伸。即,齿条32a的多个齿排列在开闭方向a。传动齿轮32b啮合在齿条32a。因此,传递到传动齿轮32b的第一马达31的旋转力转换为向开闭方向a的齿条32a的直行移动力。当齿条32a向开闭方向a移动时,块33a以及第一手指21也与齿条32a一起向开闭方向a移动。
[0080]
在这样构成的开闭机构3中,当第一马达31被驱动时,第一马达31的旋转驱动力由齿轮系32传递。最终,旋转驱动力通过含在齿轮系32的齿条32a和传动齿轮32b,作为直行移动力向块33a传递。块33a沿着引导件33向开闭方向a移动。第一手指21也与块33a一起向开闭方向a移动。开闭方向a中的第一手指21的移动的朝向通过第一马达31的旋转方向切换。并且,第一手指21在开闭方向a的位置根据第一马达31的编码器输出检测。并且,第一手指21移动时的第一马达31的旋转力矩根据电流传感器的检测结果检测。
[0081]
由于开闭机构3设置在每个第一手指21,因此两个第一手指21通过各自的开闭结构3彼此独立地向开闭方向a移动。
[0082]-弯曲机构-[0083]
如图3、图5、图6所示,弯曲机构4具有第二马达41、齿轮系42、第一同步带轮43、第二同步带轮44和同步带45,所述齿轮系42传递第二马达41的驱动力,所述第一同步带轮43经由齿轮系42传递第二马达41的驱动力,所述第二同步带轮44被设置在关节24,所述同步带45将第一同步带轮43的旋转传递给第二同步带轮44。第一同步带轮43、第二同步带轮44和同步带45对于一个第一手指21设置有1组。
[0084]
第二马达41例如是伺服马达,设置有编码器。并且,在第二马达41的驱动器设置有电流传感器。
[0085]
齿轮系42包含蜗杆传动、蜗轮以及正齿轮42a等。正齿轮42a经由滚珠花键46被可旋转地支撑着。详细而言,滚珠花键46在向开闭方向a延伸的状态下被设置在基座1。滚珠花键46以其轴d为中心可旋转地被基座1支撑着。正齿轮42a不可旋转地设置在滚珠花键46。即,正齿轮42a以轴d作为中心与滚珠花键46一体旋转。
[0086]
第一同步带轮43不可旋转地设置在滚珠花键46。在滚珠花键46设置有两个第一同步带轮43。第一同步带轮43以轴d作为中心与滚珠花键46一体旋转。也就是说,正齿轮42a的旋转经由滚珠花键46传递到第一同步带轮43。此外,第一同步带轮43成为能够相对于滚珠花键46向轴d的方向滑动。
[0087]
并且,每个第一同步带轮43连接在对应的一个第一手指21。详细而言,第一同步带轮43以轴d为中心可旋转地连接在第二部分23中的基座1侧的端部。也就是说,当第一手指21沿着引导件33向开闭方向a移动时,第一同步带轮43与第一手指21一起向滚珠花键46的轴d的方向移动。并且,当滚珠花键46旋转时,第一手指21不旋转,第一同步带轮43与滚珠花键46一起旋转。
[0088]
第二同步带轮44在每个第一手指21的关节24中不可旋转地设置在第一部分22的固定部分26。也就是说,当第二同步带轮44旋转时,第一部分22以旋转轴b为中心旋转。
[0089]
同步带45缠绕在第一同步带轮43以及第二同步带轮44上。同步带45将第一同步带轮43的旋转传递给第二同步带轮44。
[0090]
在像这样构成的弯曲机构4中,当第二马达41被驱动时,第二马达41的旋转驱动力经由齿轮系42被传递到滚珠花键46。当滚珠花键46围绕轴d旋转时,设置在滚珠花键46的第一同步带轮43围绕轴d旋转。由于第一手指21连接在引导件33,因此不旋转。第一同步带轮43的旋转通过同步带45被传递到第二同步带轮44。当第二同步带轮44旋转时,第一手指21的第一部分22以旋转轴b为中心旋转。因此,第一手指21弯曲。需要说明的是,根据第一部分22的旋转角度,会使得第一部分22以及第二部分23成为呈一直线状排列的状态。
[0091]
围绕旋转轴b的第一部分22的旋转的朝向即第一手指21的弯曲的朝向通过第二马达41的旋转方向切换。并且,第一部分22的围绕旋转轴b的旋转位置即第一手指21的弯曲的程度或弯曲的角度根据第二马达41的编码器输出检测。并且,第一手指21弯曲时的第二马达41的旋转力矩根据电流传感器的检测结果检测。
[0092]
在每个第一手指21设置有一组的第一同步带轮43、第二同步带轮44以及同步带45。每个第一手指21的第一同步带轮43设置在共通的滚珠花键46。也就是说,两个第一手指21通过共通的第二马达41的驱动同时且同样弯曲。弯曲的朝向以及角度在两个第一手指21是相同的。
[0093]
需要说明的是,第一手指21可以沿着引导件33向开闭方向a移动。此时,第一同步带轮43也与第一手指21一起沿着滚珠花键46向开闭方向a移动。也就是说,在开闭方向a的任意位置,弯曲机构4能够使第一手指21弯曲。
[0094]-第一手h1的动作的概略说明-[0095]
像这样构成的第一手h1能够通过使用开闭机构3让两个第一手指21向开闭方向a移动,来使两个第一手指21握持工件。例如,第一手h1能够通过在开闭方向a使两个第一手指21接近(使进行闭合动作),来握持工件,另一方面,也能够通过在开闭方向a使两个第一手指21分离(使进行张开动作),来握持工件。
[0096]
并且,由于第一手h1能够通过开闭机构3使两个第一手指21独立动作,因此能够在开闭方向a中在从第一手h1的中心偏心的位置握持工件(以下,将这样的握持称为偏心握持)。这里所说的第一手h1的中心例如是第一手指21的可动范围的中心q(以下,简称为“可动范围的中心q”)。更详细而言,第一手h1根据工件的位置,调整两个第一手指21的每一个的移动量,在从第一手h1的中心偏心的位置握持工件。这样一来,第一手h1即使在工件从第一手h1的中心偏离时,也能够用两个第一手指21适当地握持工件。
[0097]
并且,如图2所示,第一手h1能够使两个第一手指21弯曲。第一手指21弯曲,以使第一部分22在将第一部分22向开闭方向a投影所形成的虚拟区域(在图2中,将第一部分22向与纸面正交的方向投影所形成的区域)x干扰到后述的第二握持部5的轴e的位置与虚拟区域x不干扰轴e的位置之间移动。例如,第一手h1能够通过弯曲机构4使握持工件的状态的两个第一手指21弯曲。因此,即使使两个第一手指21弯曲,也能够或移动工件,或改变工件的姿势。因此,能够减少机器人臂1110的动作量。
[0098]
并且,第一手h1能够通过缓冲机构25吸收作用在第一手指21的第一部分22上的冲击。因此,例如,当使第一手h1移动到工件的位置时,能够吸收因第一部分22的前端22a和工件的载置台接触而产生的向第一部分22的冲击。
[0099]
=第二手=
[0100]
第二手h2被设置在与第一手h1共通的基座1。第二手h2握持工件,执行各种处理。
[0101]
以下,进一步详细说明第二手h2。图7是在能够看见基座1的内部的状态下从与第一手h1相反的一侧来看第二手h2的概略图,是第二手指51处于完全张开状态的图。
[0102]
第二手h2包括第二握持部5、直行机构6和旋转机构7,所述第二握持部5握持工件,所述直行机构6使第二握持部5向规定的轴e方向直行,所述旋转机构7使第二握持部5围绕轴e旋转。第二握持部5具有3个第二手指51和连杆机构52,所述3个第二手指51握持工件,所述连杆机构52使3个第二手指51开闭。第二手h2能够在使由第二握持部5所握持的工件围绕轴e旋转的同时,向轴e方向直行。因此,第二手h2例如或将工件插入孔,或将工件螺合在螺丝孔。以下,将第二手指51在轴e方向从基座1前进的一侧简称为“前进侧”,将第二手指51在轴e方向向基座1后退的一侧简称为“后退侧”。
[0103]
第二手h2也可以还包括使第二手指51开闭的开闭机构8。第二手h2也可以还包括按压机构9,所述按压机构9将由第二握持部5进行的握持被释放的状态的工件向轴e方向按压。第二手h2也可以还包括缓冲机构10,所述缓冲机构10将第二手指51向轴e方向弹性支撑。
[0104]-握持部-[0105]
图8是向轴e方向从前进侧来看第二手指51的概略图。图9是以第二握持部5为中心的概略的剖面图。
[0106]
第二握持部5具有3个第二手指51和连杆机构52,所述连杆机构52使3个第二手指51开闭。第二握持部5是握持部的一个例子。
[0107]
如图8所示,3个第二手指51在以轴e为中心的圆周方向以相等间隔配置着(即,120度间隔)。3个第二手指51构成为通过连杆机构52以轴e为中心开闭。也就是说,3个第二手指51向以轴e为中心的半径方向分离以及接近。因此,3个第二手指51或握持工件,或释放工件的握持。并且,3个第二手指51以距离轴e的距离彼此相同的方式开闭。3个第二手指51是至少两个手指的一个例子。需要说明的是,虽然3个第二手指51围绕轴e以120度间隔配置着,但是在图7中,为了容易图示结构,示出了2个第二手指51围绕轴e以180度间隔配置着的状态。
[0108]
如图9所示,每个第二手指51大致向轴e方向延伸。第二手指51具有基座51a和爪51b。爪51b被设置在基座51a的前端。爪51b形成第二手指51的前端部。第二手指51在爪51b握持工件。
[0109]
连杆机构52具有多个连杆53。多个连杆53包含3组第一连杆53a以及第二连杆53b。在附图中,有时为了区分各个连杆而表示为“53a”、“53b”,有时不区分各个连杆而表示为“53”。1组第一连杆53a以及第二连杆53b连接在每个第二手指51。第一连杆53a以及第二连杆53b被配置为彼此交叉且在各自的长度方向的中央彼此可旋转地连接着。多个连杆53在以轴e为中心的半径方向被配置在3个第二手指51的内侧。
[0110]
第一连杆53a的一端部可旋转地连接在第二手指51。详细而言,在第二手指51的延伸方向延伸的长孔51c形成在第二手指51的基座51a。第一连杆53a的一端部可旋转且可滑动地连接在长孔51c。
[0111]
第二连杆53b的一端部可旋转地连接在第二手指51。详细而言,第二连杆53b的一
端部可旋转地连接在第二手指51的基座51a中的、与长孔51c相比更靠近第二手指51的前端侧的部分。
[0112]-开闭机构-[0113]
如图7所示,开闭机构8通过使连杆机构52动作,来开闭3个第二手指51。开闭机构8具有外筒81、转轴82、第三马达83和齿轮系84,所述第三马达83驱动连杆机构52,所述齿轮系84将第三马达83的驱动力传递到转轴82。
[0114]
外筒81以及转轴82以轴e为轴心,同轴状向轴e方向延伸。具体而言,外筒81形成为以轴e为轴心的大致圆筒状。转轴82形成为以轴e为轴心的大致圆柱状。
[0115]
在外筒81以及转轴82中,将轴e方向的一端部分别称为第一端部81a以及第一端部82a,将轴e方向的其它端部分别称为第二端部81b以及第二端部82b。第一端部81a以及第一端部82a是在轴e方向的前进侧的端部。第二端部81b以及第二端部82b是在轴e方向的后退侧的端部。第二握持部5连接在第一端部81a以及第一端部82a。
[0116]
外筒81被安装在基座1的轴承12支撑为可向轴e方向移动且可围绕轴e旋转。
[0117]
转轴82被插入外筒81内。外筒81和转轴82围绕轴e可相对地旋转且可向轴e方向相对地移动。转轴82的第一端部82a从外筒81的第一端部81a向外侧突出。转轴82的第二端部82b从外筒81的第二端部81b向外侧突出。
[0118]
转轴82被分割为连杆转轴82c和转轴本体82d,所述连杆转轴82c包含第一端部82a,所述转轴本体82d包含第二端部82b。连杆转轴82c和转轴本体82d以轴e为中心可旋转且不能在轴e方向移动的方式连接。在第二端部82b形成有外螺纹82g。
[0119]
如图9所示,在连杆转轴82c的前端即第一端部82a的前端设置有按压块91。
[0120]
在外筒81的第一端部81a设置有连杆块81c,所述连杆块81c引导连杆转轴82c,大致为圆筒状。连杆转轴82c贯穿连杆块81c。在连杆转轴82c与连杆块81c之间设置有微小的间隙。
[0121]
连杆机构52连接在外筒81的第一端部81a以及转轴82的第一端部82a。具体而言,第一连杆53a的一端部(没有连接在第二手指51的端部)可旋转地连接在转轴82的第一端部82a,具体来说连接在按压块91。第二连杆53b的一端部(没有连接在第二手指51的端部)可旋转地连接在外筒81的第一端部81a,具体来说连接在连杆块81c。
[0122]
当连杆转轴82c向轴e方向移动时,在轴e方向,第一连杆53a的一端部和第二连杆53b的一端部的相对位置发生变化,第二手指51的轴e方向的位置以及以轴e为中心的半径方向的位置也相应地发生变化。
[0123]
第三马达83例如是伺服马达,设置有编码器。并且,在第三马达83的驱动器设置有电流传感器。如图7所示,第三马达83被基座1支撑着。
[0124]
齿轮系84包含从第三马达83依次排列的第一齿轮系84a以及第二齿轮系84c。
[0125]
第一齿轮系84a包括多个齿轮。第一齿轮系84a的多个齿轮围绕与轴e平行的轴可旋转地被基座1支撑着。第一齿轮系84a经由滚珠花键84b将第三马达83的旋转驱动力传递给第二齿轮系84c。滚珠花键84b具有轴f,该轴f与转轴82的轴e平行地延伸。滚珠花键84b以轴f为中心可自由旋转地被基座1支撑着。第一齿轮系84a中的一个齿轮(末级齿轮)以不可围绕轴f旋转且不可向轴f方向移动的方式连接在滚珠花键84b。也就是说,当第一齿轮系84a的齿轮旋转时,滚珠花键84b围绕轴f旋转。
[0126]
第二齿轮系84c被收纳在齿轮箱85中。第二齿轮系84c包括第一齿轮84d、第二齿轮84e以及第三齿轮84f。第一齿轮84d、第二齿轮84e以及第三齿轮84f围绕与轴e平行的轴可旋转地连接在齿轮箱85。
[0127]
第一齿轮84d经由滚珠花键84b与第一齿轮系84a连接。第一齿轮84d以不可围绕轴f旋转且可向轴f方向移动的方式连接在滚珠花键84b。也就是说,第一齿轮84d与滚珠花键84b一体旋转。
[0128]
在第三齿轮84f的内周形成有内螺纹。第三齿轮84f螺合在转轴82的外螺纹82g。第二齿轮84e位于第一齿轮84d与第三齿轮84f之间,啮合在第一齿轮84d以及第三齿轮84f的每一个。
[0129]
齿轮箱85以可围绕轴e旋转且不可向轴e方向移动的方式支撑外筒81。转轴82经由第三齿轮84f被齿轮箱85支撑着。并且,齿轮箱85限制转轴82的围绕轴e的旋转,以使转轴82不围绕轴e旋转。
[0130]
对像这样构成的开闭机构8的动作进行说明。图10是在能够看见基座1的内部的状态下从与第一手h1相反的一侧来看第二手h2的概略图,是第二手指51处于完全闭合状态的图。图11是以第二手指51成为完全闭合状态的第二握持部5为中心的概略的剖面图。
[0131]
当第三马达83被驱动时,第三马达83的旋转驱动力经由第一齿轮系84a传递到滚珠花键84b。当滚珠花键84b围绕轴f旋转时,连接在滚珠花键84b的第一齿轮84d围绕轴f旋转。第一齿轮84d的旋转经由第二齿轮84e传递到第三齿轮84f。由于转轴82不围绕轴e旋转,因此当第三齿轮84f旋转时,如图10所示,转轴82对于第三齿轮84f向轴e方向相对地移动。也就是说,转轴82对于外筒81向轴e方向相对地移动。如图11所示,通过向轴e方向的转轴82的移动,使得第一连杆53a的一端部也与转轴82一起向轴e方向移动。连接在外筒81的第二连杆53b的一端部与连接在转轴82的第一连杆53a的一端部的向轴e方向的相对位置发生变化,第一连杆53a与第二连杆53b的相对关系发生变化。因此,3个第二手指51向以轴e为中心的半径方向移动。即,3个第二手指51开闭。
[0132]
转轴82向轴e方向移动的朝向即3个第二手指51的以轴e为中心分离还是接近是由第三马达83的旋转方向切换的。并且,3个第二手指51的以轴e为中心的半径方向的位置即3个第二手指51的开闭的程度是根据第三马达83的编码器输出检测的。并且,3个第二手指51开闭时的第三马达83的旋转力矩是根据电流传感器的检测结果检测的。
[0133]-直行机构以及旋转机构-[0134]
如上所述,第二握持部5连接在外筒81以及转轴82。直行机构6通过使外筒81以及转轴82向轴e方向移动,来使第二握持部5向轴e方向直行。旋转机构7通过使外筒81以及转轴82的连杆转轴82c围绕轴e旋转,来使第二握持部5围绕轴e旋转。需要说明的是,在该例子中,要素的一部分在直行机构6与旋转机构7之间是共通的。并且,直行机构6与开闭机构8之间要素的一部分是共通的。旋转机构7与开闭机构8之间要素的一部分是共通的。
[0135]
如图7、图10所示,详细而言,直行机构6具有第四马达61、第一齿轮系62、进给丝杆机构63、外筒81以及转轴82,所述第一齿轮系62传递第四马达61的驱动力。
[0136]
第四马达61例如是伺服马达,设置有编码器。并且,在第四马达61的驱动器设置有电流传感器。第四马达61被基座1支撑着。第四马达61是驱动部的一个例子。
[0137]
第一齿轮系62具有多个齿轮,该多个齿轮可旋转地被基座1支撑。
[0138]
进给丝杆机构63具有进给丝杆64和螺母65,所述螺母65作为啮合在进给丝杆64的直行要素。
[0139]
进给丝杆64的轴g与轴e平行延伸。进给丝杆64不可旋转地连接在包含在第一齿轮系62中的一个齿轮。即,进给丝杆64围绕轴g与该一个齿轮一体旋转。
[0140]
螺母65啮合在进给丝杆64。螺母65被收纳在齿轮箱85。螺母65被齿轮箱85阻止旋转,以不围绕轴g旋转。螺母65具有形成为筒状的本体65a和设置在本体65a的凸缘65b。
[0141]
螺母65通过缓冲机构10向轴g方向即轴e方向被弹性按压在齿轮箱85。详细而言,缓冲机构10是弹簧。具体而言,缓冲机构10是螺旋弹簧。缓冲机构10相对于凸缘65b被配置在轴e方向的前进侧。缓冲机构10成为在凸缘65b与齿轮箱85之间压缩的状态。缓冲机构10通过弹性力向轴e方向的前进侧将齿轮箱85向螺母65按压。因此,当螺母65向轴g方向移动时,齿轮箱85也与螺母65一体向轴g方向即轴e方向移动。
[0142]
外筒81以及转轴82的结构如上所述。外筒81以围绕轴e可旋转且不可向轴e方向移动的方式被齿轮箱85支撑着。转轴82经由第三齿轮84f被齿轮箱85支撑着。因此,当齿轮箱85向轴e方向移动时,外筒81以及转轴82也与齿轮箱85一起向轴e方向移动。
[0143]
如图7、图10所示,旋转机构7具有第四马达61、第一齿轮系62、第二齿轮系73、外筒81以及转轴82,所述第一齿轮系62传递第四马达61的驱动力,所述第二齿轮系73将第四马达61的驱动力从第一齿轮系62向外筒81进一步传递。也就是说,旋转机构7的第四马达61、第一齿轮系62、外筒81以及转轴82与直进机构6共通。
[0144]
第二齿轮系73包含第五齿轮73a以及第六齿轮73b。第五齿轮73a以及第六齿轮73b以不可向轴e方向移动且围绕与轴e平行的轴可旋转地被齿轮箱85支撑着。
[0145]
第五齿轮73a经由滚珠花键73c与包含在第一齿轮系62中的一个齿轮连接。滚珠花键73c的轴h与轴e平行延伸。滚珠花键73c围绕轴h不可旋转地连接在该一个齿轮。也就是说,滚珠花键73c围绕轴h与该一个齿轮一体旋转。
[0146]
第五齿轮73a以围绕轴h不可旋转且向轴h方向可移动的方式连接在滚珠花键73c。也就是说,第五齿轮73a与滚珠花键73c一体旋转。此时,第五齿轮73a对于齿轮箱85相对地旋转。
[0147]
第六齿轮73b以轴e为中心不可旋转且向轴e方向不可移动的方式连接在外筒81。也就是说,第六齿轮73b与外筒81一体旋转。
[0148]
对像这样构成的直进机构6以及旋转机构7的动作进行说明。图12是在能够看见基座1的内部的状态下从与第一手h1相反的一侧来看第二手h2的概略图,是第二手指51处于完全张开状态,向轴e方向前进的图。
[0149]
当第四马达61被驱动时,第四马达61的旋转驱动力经由第一齿轮系62传递到滚珠花键73c。当滚珠花键73c围绕轴h旋转时,滚珠花键73c的旋转被传递到第二齿轮系73。因此,第六齿轮73b围绕轴e旋转,与此同时,外筒81也围绕轴e旋转。连杆53中的第二连杆53b连接在外筒81的第一端部81a。这里,连接有连杆53中的第一连杆53a的连杆转轴82c相对于转轴本体82d围绕轴e自由旋转。因此,当第二连杆53b围绕轴e旋转时,第一连杆53a也与第二连杆53b一起围绕轴e旋转。其结果是3个第二手指51围绕轴e旋转。
[0150]
另外,即使3个第二手指51围绕轴e旋转,只要第三马达83不动作,转轴本体82d就不旋转。因此,外筒81和转轴82的轴e方向的相对位置不发生变化。其结果是3个第二手指51
的开闭状态不发生变化,3个第二手指51围绕轴e旋转。
[0151]
与此同时,第四马达61的旋转驱动力经由第一齿轮系62被传递到进给丝杆64。当进给丝杆64围绕轴g旋转时,螺合在进给丝杆64的螺母65向轴g方向移动。当螺母65向轴g方向移动时,齿轮箱85也向轴g方向即轴e方向移动。齿轮箱85支撑外筒81以及转轴82。因此,当齿轮箱85向轴e方向移动时,外筒81以及转轴82也与齿轮箱85一体向轴e方向移动。此时,外筒81通过旋转机构7被围绕轴e旋转。也就是说,外筒81在围绕轴e旋转的同时,向轴e方向直进。
[0152]
并且,齿轮箱85还支撑开闭机构8的第二齿轮系84c。因此,当齿轮箱85向轴e方向移动时,第二齿轮系84c也与齿轮箱85向轴e方向一体移动。包含在第二齿轮系84c中的第一齿轮84d除了由齿轮箱85支撑之外,还连接到滚珠花键84b。因此,当齿轮箱85向轴e方向移动时,第一齿轮84d沿滚珠花键84b滑动,且与齿轮箱85一起向轴e方向移动。此时,只要第三马达83不动作,第一齿轮84d就在不围绕滚珠花键84b的轴f旋转的状态下,向轴e方向移动。因此,包含在第二齿轮系84c中的齿轮不旋转。因此,当齿轮箱85向轴e方向移动时,外筒81和转轴82的轴e方向的相对位置不发生变化。其结果是,3个第二手指51的开闭状态不发生变化,3个第二手指51向轴e方向移动。
[0153]
需要说明的是,第五齿轮73a除了被齿轮箱85支撑之外,还连接在滚珠花键73c。不过,第五齿轮73a能够沿着滚珠花键73c向轴h方向移动。因此,当齿轮箱85向轴e方向移动时,第五齿轮73a沿着滚珠花键73c滑动,与齿轮箱85一起向轴e方向移动。即使齿轮箱85向轴e方向移动,第五齿轮73a也将滚珠花键73c的旋转适当地传递给第六齿轮73b。
[0154]-按压机构-[0155]
按压机构9将由第二握持部5进行的握持被释放的状态的工件向轴e的方向按压。在该例子中,按压机构9与直行机构6形成为一体。即,按压机构9在与直行机构6之间要素的一部分共通。具体而言,如图7、图10、图12所示,按压机构9具有第四马达61、第一齿轮系62、进给丝杆机构63、转轴82以及按压块91(参照图9、图11),所述第一齿轮系62传递第四马达61的驱动力,所述按压块91设置在转轴82。
[0156]
如上所述,第四马达61的驱动力通过第一齿轮系62传递到进给丝杆机构63。进给丝杆机构63经由齿轮箱85等使转轴82向轴e方向直进。如图9所示,在转轴82中的连杆转轴82c的前端即第一端部82a的前端设置有按压块91。按压块91具有与轴e正交的按压面92。当转轴82因第四马达61的驱动而向轴e方向直进时,按压块91向轴e方向直进。按压块91是按压部的一个例子。
[0157]
连杆机构52的连杆53连接在按压块91。当第二手指51张开时(至少张开到最大程度时),第二手指51成为从与按压块91相比更靠近轴e方向的前进侧的空间向以轴e为中心的半径方向外侧退避的状态。通过第二手指51像这样成为张开的状态,能够避免当按压块91向轴e方向直进时工件与第二手指51发生干扰。也就是说,能够在不被第二手指51干扰的情况下,通过按压块91按压工件。
[0158]-缓冲机构-[0159]
图13是以缓冲机构10为中心的放大剖面图。需要说明的是,在图13中,用虚线示出了即使在缓冲机构10的缓冲作用下,也不会对于基座1相对移动的部件,即,进给丝杆64、螺母65、滚珠花键73c以及滚珠花键84b。缓冲机构10与进给丝杆机构63的螺母65和齿轮箱85
[0169]
在该轴承单元200的组装作业中,作为部品,包含底板210、角钢220、轴承座230、螺栓240以及转轴250。图15是示出了底板210的概略结构的立体图。图16是示出了角钢220的概略结构的立体图。图17是示出了轴承座230的概略结构的立体图。
[0170]
底板210是板状部件,从俯视来看形成为矩形。在底板210设置有用于通过螺栓240紧固角钢220的两个螺丝孔211。螺丝孔211贯穿底板210的厚度方向。
[0171]
角钢220是安装轴承座230的部件。角钢220具有第一板221和第二板222。第一板221和第二板222连接成直角。在第二板222设置有与底板210的螺丝孔211相对应的两个通孔223。也就是说,通孔223是供螺栓240插入的孔,所述螺栓240用于将角钢220安装在底板210。在第一板221设置有安装孔224,该安装孔224贯穿第一板221的厚度方向,轴承座230插入在内。
[0172]
并且,在第一板221设置有螺丝孔225,所述螺丝孔225在安装孔224的周围有多个(在该例子中为4个)。螺丝孔225是用于通过螺栓240将被插入安装孔224的轴承座230紧固在角钢220的孔。4个中的两个螺丝孔225在垂直方向排列,剩余的两个螺丝孔225在水平方向排列。也就是说,4个螺丝孔225在安装孔224的圆周方向彼此间隔90度设置着。另外,螺丝孔225贯穿第一板221的厚度方向。
[0173]
轴承座230是用于保持轴承235的部品。在该例子中,轴承235已安装在轴承座230的内侧。在轴承235形成有供转轴250插入的通孔236。轴承座230具有座本体231和凸缘232。座本体231形成为圆筒状。凸缘232形成为圆环状,一体形成在座本体231的轴方向的端部的外周。座本体231插入角钢220的安装孔224。座本体231的外径与安装孔224的孔径大致相同。在凸缘232设置有与角钢220的螺丝孔225相对应的4个通孔233。也就是说,通孔233是供螺栓240插入的孔,所述螺栓240用于将轴承座230安装在角钢220。在每个通孔233设置有锪孔234,所述锪孔234收纳螺栓240的头部。
[0174]
螺栓240具有螺栓本体241和头部242,所述螺栓本体241形成有外螺纹,所述头部242设置在螺栓本体241的端部且为圆柱状(参照后述的图20)。
[0175]
以下,详细说明各个作业中的手100的动作。需要说明的是,在以下的作业中,控制部1200如后述那样使机器人臂1110以及手100动作。
[0176]-载置作业-[0177]
图18是示出了通过第一握持部2握持角钢220的状态的概略图。图19是示出了通过第一握持部2将角钢220载置在底板210的状态的概略图。在该载置作业中,底板210以在水平方向延伸的状态位于台架等。
[0178]
首先,通过第一手h1的第一握持部2握持托盘t上的角钢220。详细而言,角钢220以第一板221在水平方向延伸的状态且第二板222在垂直方向延伸的状态载置在托盘t上。机器人臂1110使手100移动,使第一握持部2位于托盘t的角钢220的位置。此时,第一握持部2的两个第一手指21成为延伸状态且张开的状态。如图18所示,第一握持部2在开闭方向a使两个第一手指21向彼此接近的朝向移动,通过两个第一手指21握持角钢220。
[0179]
其次,第一握持部2将所握持的角钢220载置在底板210。详细而言,第一握持部2使握持有角钢220的状态的两个第一手指21弯曲。具体而言,第一手指21弯曲,以使第一板221成为在垂直方向延伸的状态且第二板222位于下侧。并且,如图19所示,机器人臂1110使手100移动,将由第一握持部2握持的角钢220载置在底板210的规定位置。具体而言,机器人臂
1110以角钢220的通孔223的轴心与底板210的螺丝孔211的轴心一致的方式将角钢220载置在底板210。
[0180]
通过以上的动作完成载置作业。
[0181]-第一紧固作业-[0182]
图20是示出了通过第一握持部2握持螺栓240的状态的概略图。图21是示出了第二握持部5从第一握持部2接受螺栓240的状态的概略图。图22是示出了第二握持部5将螺栓240拧入螺纹孔211的状态的概略图。
[0183]
首先,通过第一手h1的第一握持部2握持托盘t上的螺栓240。详细而言,机器人臂1110使手100移动,使第一握持部2位于托盘t的螺栓240的位置。此时,第一握持部2的两个第一手指21成为延伸状态且张开的状态。并且,螺栓240位于两个第一手指21之间。如图20所示,第一握持部2在开闭方向a中使两个第一手指21向彼此接近的朝向移动,通过两个第一手指21握持螺栓240。
[0184]
其次,第一握持部2将螺栓240移交给第二手h2的第二握持部5。详细而言,第一握持部2使握持有螺栓240的状态的两个第一手指21弯曲。具体而言,第一握持部2使第一手指21弯曲,使第一部分22移动到将第一部分22向开闭方向a投影而形成的虚拟区域x干扰到轴e的位置为止。虚拟区域x是在图21中将第一部分22投射到与纸面正交的方向的区域。需要说明的是,在图21中,为了容易理解虚拟区域x,使虚拟区域x比第一部分22稍大一点,用双点划线示出(在图28中也是一样)。使第一部分22移动到虚拟区域x干扰到轴e的位置为止的结果是螺栓240位于3个第二手指51进退的轴e的附近。然后,第二手h2使第二手指51向轴e方向移动,使第二手指51位于由第一手指21所握持的螺栓240的位置。此时,3个第二手指51成为张开的状态。第二手h2使3个第二手指51彼此接近地移动,如图21所示,通过3个第二手指51握持螺栓240。3个第二手指51在螺栓240的螺栓本体241的轴心与轴e一致的状态下握持螺栓240的头部242。
[0185]
接着,第二手h2使螺栓240螺合在螺丝孔211。详细而言,机器人臂1110使手100移动,使由第二握持部5所握持的螺栓240位于底板210的螺丝孔211的上方即角钢220的通孔223的上方。此时,机器人臂1110使螺栓本体241的轴心与通孔223的轴心大致一致。第二手h2在通过旋转机构7使第二手指51旋转的同时,通过直进机构6使第二手指51向下方移动。因此,如图22所示,螺栓240进入通孔223,进一步被拧入螺丝孔211。最终,第二手h2将螺栓240拧入螺丝孔211,直到螺栓240将第二板222固定在底板210为止。
[0186]
通过对两处螺丝孔211进行这些一连串的动作,最终角钢220被螺栓紧固在底板210。
[0187]
通过以上动作完成第一紧固作业。
[0188]-螺栓插入作业-[0189]
图23是示出了通过第二握持部5握持轴承座230的状态的概略图。图24是示出了通过第二握持部5将轴承座230插入角钢220内的状态的概略图。
[0190]
首先,通过第二手h2的第二握持部5握持托盘t上的轴承座230。详细而言,机器人臂1110使手100移动,使第二握持部5位于托盘t的轴承座230的位置。轴承座230在凸缘232在上且座本体231在下的状态下载置在托盘t上。第二握持部5的3个第二手指51以闭合的状态被插入座本体231内的轴承235的通孔236的内部。第二手h2使3个第二手指51张开,如图
23所示,使3个第二手指51接触到通孔236的内周表面。因此,第二握持部5通过3个第二手指51握持轴承座230。
[0191]
其次,第二手h2使轴承座230嵌合到角钢220的安装孔224。详细而言,机器人臂1110使手100移动,使由第二握持部5所握持的轴承座230位于角钢220的安装孔224的侧方。此时,机器人臂1110使第二握持部5的轴e即轴承座230的轴心与安装孔224的轴心大致一致。并且,机器人臂1110使手100移动,使轴承座230的座本体231向安装孔224接近。然后,第二手h2在通过旋转机构7使第二手指51旋转的同时,通过直进机构6使第二手指51向轴e方向直进。因此,座本体231进入安装孔224内。最终,如图24所示,第二手h2将轴承座230插入安装孔224,直到轴承座230的凸缘232接触到第一板221为止。
[0192]
通过以上动作完成插入作业。
[0193]-定位作业-[0194]
图25是从端面232a侧来看被插入角钢220内的轴承座230的一种状态的图。
[0195]
首先,手100将第一握持部2推按在轴承座230的凸缘232的端面232a的规定位置。这里,凸缘232的端面232a是轴承座230的轴心k方向的凸缘232的端部的面。详细而言,机器人臂1110使手100移动,使第一握持部2位于凸缘232的端面232a的侧方。此时,第一握持部2的两个第一手指21是延伸状态且成为张开状态。并且,两个中的一个第一手指21通过开闭机构3被移动到与开闭方向a的所述规定位置相对应的位置。并且,机器人臂1110使手100朝向凸缘232移动,将一个第一手指21推按在端面232a的规定位置。
[0196]
接着,通过第一手h1的第一握持部2使轴承座230旋转,进行定位。详细而言,机器人臂1110使手100旋转,使第一握持部2的一个第一手指21围绕轴承座230的轴心k旋转。并且,如图25所示,当被推按在端面232a的第一手指21旋转到通孔233的位置为止时,该第一手指21进入该通孔233的锪孔234(卡止)。并且,机器人臂1110进一步使手100旋转,使凸缘232的通孔233的轴心与角钢220的螺丝孔225的轴心一致。这样一来,轴承座230被定位在规定的旋转位置。需要说明的是,在图25中,有关第一手指21,示出了其前端(即,第一部分22的前端22a)。并且,在图25中,省略了轴承235的图示。
[0197]
通过以上动作完成定位作业。
[0198]-第二紧固作业-[0199]
图26是示出了通过第二握持部5将螺栓240拧入角钢220的螺纹孔225的状态的概略图。
[0200]
首先,通过第一手h1的第一握持部2握持托盘t上的螺栓240。其次,第一握持部2将螺栓240移交给第二手h2的第二握持部5。这些动作与第一紧固作业相同。
[0201]
接着,第二手h2使螺栓240螺合在角钢220的螺丝孔225。详细而言,机器人臂1110使手100移动,使由第二握持部5所握持的螺栓240位于角钢220的螺丝孔225的侧方即轴承座230的通孔233的侧方。此时,机器人臂1110使第二握持部5的轴e即螺栓240的轴心与螺丝孔225的轴心大致一致。并且,机器人臂1110使手100移动,且将螺栓240稍微插入通孔233中。然后,第二手h2在通过旋转机构7使第二手指51围绕轴e旋转的同时,通过直进机构6使第二手指51向轴e方向直进。因此,如图26所示,螺栓240进入通孔233内,进一步被拧入螺丝孔225。最终,第二手h2将螺栓240拧入螺丝孔225,直到螺栓240使轴承座230的凸缘232固定在角钢220为止。
[0202]
通过对4处螺丝孔225进行这些一连串的动作,最终轴承座230被螺栓紧固在角钢220。
[0203]
通过以上动作完成第二紧固作业。
[0204]-转轴插入作业-[0205]
图27是示出了通过第一握持部2握持转轴250的状态的概略图。图28是示出了第二握持部5从第一握持部2接受转轴250的状态的概略图。图29是示出了通过第二握持部5将转轴250插入轴承座230的轴承235的状态的概略图。
[0206]
首先,通过第一手h1的第一握持部2握持托盘t上的转轴250。详细而言,机器人臂1110使手100移动,使第一握持部2位于托盘t的转轴250的位置。此时,第一握持部2的两个第一手指21是延伸状态且成为张开状态。并且,转轴250位于两个第一手指21之间。第一握持部2在开闭方向a使两个第一手指21向彼此接近的朝向移动,如图27所示,通过两个第一手指21握持转轴250。
[0207]
其次,第一握持部2将转轴250移交给第二手h2的第二握持部5。详细而言,第一握持部2使握持有转轴250的状态的两个第一手指21弯曲。具体而言,第一握持部2使第一手指21弯曲,使第一部分22移动到第一部分22的虚拟区域x干扰到轴e的位置为止。其结果是转轴250位于3个第二手指51进退的轴e的附近。然后,第二手h2使第二手指51向轴e方向移动,使第二手指51位于由第一手指21所握持的转轴250的位置。此时,3个第二手指51成为张开的状态。第二手h2使3个第二手指51彼此接近地移动,如图28所示,通过3个第二手指51握持转轴250。3个第二手指51在转轴250的轴心与轴e一致的状态下握持转轴250的端部。
[0208]
其次,第二握持部5将转轴250插入轴承座230的轴承235。详细而言,机器人臂1110使手100移动,使由第二握持部5所握持的转轴250位于轴承座230的侧方。此时,机器人臂1110使第二握持部5的轴e即转轴250的轴心与轴承235的通孔236的轴心大致一致。并且,机器人臂1110使手100移动,将转轴250稍微推按在轴承235的通孔236的附近。然后,第二手h2在通过旋转机构7使第二手指51围绕轴e旋转的同时,通过直进机构6使第二手指51向轴e方向直进。因此,转轴250进入通孔236内。此时,有时第二手h2释放由第二握持部5对转轴250的握持,用按压机构9的按压块91将转轴250向轴e方向按压,将转轴250插入通孔236。最终,在转轴250被插入通孔236规定量的地方,第二手h2停止转轴250的插入。
[0209]
通过以上的动作完成转轴插入作业,完成轴承单元200的组装作业。
[0210]
在这样的轴承单元200的组装作业中,第一手h1能够吸收从托盘t向第一手指21的冲击。
[0211]
详细而言,在所述载置作业中,机器人臂1110使第一手h1向被放置在托盘t的角钢220的上方移动。接着,如图30所示,机器人臂1110使第一手h1下降,使第一握持部2的第一手指21接触托盘t。此时,两个第一手指21成为延伸状态。当第一手指21接触到托盘t时,在第一手指21的第一部分22,可动部分27在延伸方向c2向固定部分26侧移动(参照图30所示的实线的箭头)。
[0212]
因此,第一手指21接触到托盘t时的冲击被缓冲机构25吸收。这样一来,由于第一手指21和托盘t的冲突在一定程度上被允许,因此能够更高速地使第一手h1移动到角钢220的位置。并且,由于能够吸收与托盘t的冲击,因此不必正好停止在托盘t的位置,不必高精度地检测出托盘t的位置。
[0213]
在第一手指21接触到托盘t的状态下,有时第一手指21的可动范围的中心q(以下,还简称为“可动范围的中心q”)与角钢220的握持对象部分偏离。也就是说,有时两个第一手指21的间隔的中心(以下,还简称为“两个第一手指21的中心”)与工件偏离。此时,第一手h1能够偏心握持工件。
[0214]
这里,为了方便说明,参照图31~图33对偏心握持简单形状的工件w的情况进行说明。在该例子中,工件w在向水平方向的移动被限制的状态下载置在载置台s。
[0215]
如图31所示,在两个第一手指21接触到载置台s的状态下,两个第一手指21位于工件w的外侧。此时,两个第一手指21的可动部分27成为向固定部分26侧移动的状态。并且,可动范围的中心q与工件w偏离。也就是说,工件w向一个第一手指21侧偏心。
[0216]
如图32所示,在该状态下,两个第一手指21通过开闭机构3被移动。具体而言,通过控制部1200控制两个第一马达31,两个第一手指21在开闭方向a向彼此接近的朝向移动。也就是说,两个第一手指21分别向着工件w移动。此时,对于两个第一手指21的移动的阻力彼此大致相同,还小。因此,各个第一马达31所需的旋转力矩较小。然后,两个中的一个第一手指21先接触到工件w。这样一来,与接触到工件w的第一手指21相对应的第一马达31的旋转力矩上升。并且,当与接触到工件w的第一手指21相对应的第一马达31的旋转力矩上升到规定值时,控制部1200使该第一马达31停止。因此,先接触到工件w的第一手指21停止。
[0217]
即使先接触到工件w的第一手指21停止,另一个第一手指21也继续移动。也就是说,由于与没有接触到工件w的第一手指21相对应的第一马达31的旋转力矩保持较小,因此控制部1200继续驱动该第一马达31。然后,如图33所示,另一个第一手指21也接触到工件w停止。需要说明的是,在该例子中,另一个第一手指21移动到超过可动范围的中心q的位置为止。这样一来,工件w就被偏心握持。并且,控制部1200根据第一马达31的编码器输出,来使握持有工件w的状态的两个第一手指21移动到可动范围的中心q,无图示。这样一来,即使在可动范围的中心q与工件w偏离的情况下,由于能够通过开闭机构3使两个第一手指21独立动作,因此能够适当地握持工件w。并且,由于能够进行这样的偏心握持,因此不必在上述组装作业中高精度地进行作为工件的角钢220的位置检测。
[0218]
像这样,两个第一手指21构成为一个第一手指21能够超过可动范围的中心q(第一手h1的中心)向另一个第一手指21侧移动。因此,即使对于以上所说明的那样的较小的工件w,也能够适当地进行偏心握持。
[0219]
并且,在所述轴承单元200的组装作业中,第一手h1能够改变所握持的工件的姿势以及位置。
[0220]
详细而言,在所述载置作业中,当第一握持部2握持角钢220时,机器人臂1110使第一手h1向上方移动。在该状态下,如图34所示,两个第一手指21成为延伸状态,角钢220成为第一板221在水平方向延伸的状态。并且,当第一手h1向上方移动时,第一手指21的第一部分22返回到通常状态。也就是说,可动部分27因弹簧29的伸长而向下方移动。
[0221]
然后,第一握持部2使握持有角钢220的状态的两个第一手指21向规定的方向弯曲(参照图19)。也就是说,第一握持部2以所握持的角钢220成为规定的姿势的方式使两个第一手指21弯曲。具体而言,角钢220的姿势被改变,以成为第一板221在垂直方向延伸且第二板222位于下侧的状态。像这样,通过第一手h1使握持有工件的状态的两个第一手指21弯曲,能够改变工件的姿势,能够使工件移动。因此,即使不使机器人臂1110动作,也能够改变
所握持的工件的姿势以及位置。
[0222]
特别是在如上所述的轴承单元200的组装作业中,第一手h1能够将所握持的工件移交给第二手h2的第二握持部5。
[0223]
详细而言,在所述第一紧固作业中,第一握持部2将螺栓240移交给第二握持部5。具体而言,第一握持部2的弯曲机构4使握持有螺栓240的状态的两个第一手指21弯曲,且使螺栓240移动到规定的移交位置。在该例子中,规定的移交位置是第二握持部5的3个第二手指51进退的轴e上的位置。也就是说,两个第一手指21以所握持的螺栓240位于轴e上的附近的方式弯曲。然后,第二握持部5通过3个第二手指51握持螺栓240。像这样,进行将螺栓240(工件)从第一握持部2向第二握持部5移交的移交动作。并且,第二紧固作业中的螺栓240的移交动作以及转轴插入作业中的转轴250的移交动作也与第一紧固作业时的动作相同。
[0224]
并且,在如上所述的轴承单元200的组装作业中,第一手h1能够在不检测螺丝孔225以及通孔233的位置的情况下,进行轴承座230的定位。
[0225]
详细而言,在所述定位作业中,控制部1200通过在将第一手指21的前端推按到轴承座230的凸缘232的端面232a,使其缩回的状态下,沿着凸缘232的端面232a使第一手指21的前端滑动,以使第一手指21卡止在形成在轴承座230的凸缘232的、凹于端面232a的锪孔234,使其旋转(移动),来使轴承座230旋转(移动)。
[0226]
也就是说,在所述定位作业中,通过控制部1200进行以下的第一手h1(手100)的控制方法。该控制方法包含推按动作、卡止动作以及移动动作。在推按动作中,将第一手指21的前端22a推按在凸缘232的端面232a来使其缩回。在卡止动作中,沿着凸缘232的端面232a使因推按动作而处于缩回状态的第一手指21滑动,以使第一手指21卡止在形成在轴承座230的凸缘232的、凹于端面232a的锪孔234。在移动动作中,通过使因卡止动作而卡止在锪孔234的状态的第一手指21旋转(移动),来使轴承座230旋转(移动)。需要说明的是,轴承座230是工件的一个例子,端面232a是表面的一个例子,锪孔234是卡止部的一个例子。
[0227]
更详细而言,如图35以及图36所示,在推按动作中,两个中的一个第一手指21的前端22a由机器人臂1110推按在凸缘232的端面232a的规定位置(后述的移动路径r的起点ra)。此时,在手100中,一个第一手指21通过开闭机构3被移动到与开闭方向a的所述规定位置(移动路径r的起点ra)相对应的位置。没有推按到端面232a的另一个第一手指21位于凸缘232的外侧。第一手指21的前端22a成为比可动部分27中的其它部分还细,成为能够进入锪孔234的大小。需要说明的是,在图35以及后述的图38中,与图25一样,关于第一手指21示出了其前端(即,第一部分22的前端22a)。并且,在图35、图36以及后述的图37~图39中,与图25一样,省略了轴承235的图示。
[0228]
在控制部1200中,在凸缘232的端面232a中设定有使一个第一手指21移动的规定的移动路径r。在该例子中,如图35所示,移动路径r设定在4个通孔233(锪孔234)的节圆p上。具体而言,移动路径r成为从节圆p的10点的角度位置开始逆时针旋转到6点的角度位置为止的路径。也就是说,移动路径r的起点ra被设定在节圆p的10点的角度位置,移动路径r的终点rb被设定在节圆p的6点的角度位置。因此,在推按动作中,一个第一手指21被推按到移动路径r的起点ra。也就是说,在一个第一手指21,第一部分22的前端22a被推按到端面232a。一个第一手指21在被推按到端面232a的状态下,缓冲机构25的弹簧29被压缩,可动部分27成为向固定部分26侧已缩回(已移动)的状态。另一个第一手指21的可动部分27成为通
常状态。通过上述内容完成推按动作。需要说明的是,此时,假设一个第一手指21没有插入任何锪孔234中(没有被卡止)。
[0229]
接着,在卡止动作中,机器人臂1110使手100旋转,使第一握持部2的两个第一手指21旋转。此时,手100的旋转中心与凸缘232的轴心k即4个通孔233的节圆p的中心一致。并且,在图35中,手100以轴心k为中心逆时针旋转。因此,一个第一手指21也在节圆p的移动路径r上朝向终点rb移动。并且,如图25以及图37所示,一个第一手指21在旋转(移动)到通孔233的位置时,因弹簧29的伸长而进入该通孔233的锪孔234。也就是说,在一个第一手指21,可动部分27朝向通孔233移动。因此,一个第一手指21卡止在锪孔234。这样一来,当一个第一手指21卡止在锪孔234时,轴承座230成为与第一手指21一起旋转的状态。通过以上内容完成卡止动作。通过上述内容完成卡止动作。
[0230]
接着,在移动动作中,机器人臂1110使得手100进一步旋转。这样一来,如图38所示,随着两个第一手指21旋转,轴承座230也逆时针旋转。也就是说,通孔233(锪孔234)与一个第一手指21一起旋转。并且,当一个第一手指21旋转(移动)到终点rb时,即,当一个第一手指21旋转相当于节圆p的移动路径r的旋转角度θb时,控制部1200使手100的旋转动作停止。通过上述内容完成移动动作。在该例子中,一个第一手指21从起点ra到终点rb一次都不停止地继续移动。也就是说,一个第一手指21一边移动,一边卡止在锪孔234。像这样,即使不检测一个第一手指21卡止在锪孔234,也能够使轴承座230与一个第一手指21一起旋转。
[0231]
规定的旋转角度θb被设定为大于通孔233(锪孔234)的螺距角θa的值。该螺距角θa也是角钢220的螺丝孔225的螺距角。通过如这样设定旋转角度θb,当一个第一手指21被推按到端面232a时,无论一个第一手指21与通孔233(锪孔234)的角度差是怎样的值,在使一个第一手指21旋转规定的旋转角度θb期间,都能够使一个第一手指21移动到某一个通孔233(锪孔234)的位置。
[0232]
并且,规定的旋转角度θb被设定为一个第一手指21旋转(移动)到规定位置。具体而言,该规定位置是角钢220中的某一个螺丝孔225的位置。在该例子中,在垂直方向排列的两个螺丝孔225中的下侧的螺丝孔225的位置被设定为所述规定位置。也就是说,该规定位置是对应于一个第一手指21进入的锪孔234的通孔233的轴心与螺丝孔225的轴心一致的位置。在该例子中,由于一个第一手指21被推按到节圆p的10点的角度位置,因此规定的旋转角度θb是120度。
[0233]
通过使第一手指21旋转像这样设定的旋转角度θb,如图39所示,使轴承座230旋转到通孔233(锪孔234)的轴心与螺丝孔225的轴心一致的位置。这样一来,轴承座230被定位在规定的角度位置。如上所述,即使不检测通孔233以及螺丝孔225的位置,也能够进行轴承座230的定位。
[0234]
如上所述,手100包括基座1、两个第一手指21、开闭机构3和弯曲机构4,所述两个第一手指21从基座1延伸且构成为可弯曲,所述开闭机构3被设置在基座1,使两个第一手指21向规定的开闭方向a移动,使两个第一手指21握持工件,所述弯曲机构4被设置在基座1,使两个第一手指21弯曲。每个第一手指21构成为具有第二部分23和第一部分22,所述第二部分23从基座1延伸,所述第一部分22围绕与开闭方向a平行的旋转轴b可旋转地连接在第二部分23,第一部分22相对于第二部分23弯曲。在第一部分22设置有缓冲机构25,所述缓冲机构25使第一部分22向第一部分22的延伸方向c2弹性伸缩。
[0235]
并且,机器人100包括手100和机器人臂1110,所述机器人臂1110连接有手100。
[0236]
根据这样的结构,通过在两个第一手指21的每一个设置缓冲机构25,能够在各个第一手指21独立发挥缓冲功能。并且,通过设置弯曲机构4,即使使第一手指21弯曲,也能够或移动工件,或改变工件的握持姿势。因此,能够减少机器人臂1110的动作量。由于机器人臂1110与手100相比,所需的动作空间较大,因此与其它设备等的干扰风险变大。如果能够减少机器人臂1110的动作量,则使机器人臂1110动作的控制将相应简化。并且,如果能够减少机器人臂1110的动作量,则能够减少用于使机器人臂1110动作的电力。并且,如果能够减少机器人臂1110的动作量,则能够缩短作业时间。
[0237]
并且,通过将缓冲机构25设置在第一部分22,而不是设置在第二部分23,能够简化弯曲机构4的结构。具体而言,由于在第二部分23设置有缓冲机构25,因此第二部分23不进行伸缩动作。另一方面,在弯曲机构4中,用于使第一部分22旋转的同步带45等动力传递机构经由第二部分23配置着。在这样的动力传递机构的设计中,由于不需考虑第二部分23的伸缩动作,因此能够避免动力传递机构等甚至是弯曲机构4的结构的复杂化。
[0238]
并且,当假设缓冲机构25被设置在第二部分23或比第二部分23更靠进基座1侧时,即使第一手指21弯曲,缓冲方向也不变。当在第一部分22设置有缓冲机构25时,缓冲方向随着手指的弯曲而发生变化。冲击所作用的方向因手的使用状况而各不相同,通过缓冲方向追随第一部分22发生变化,有时能够适当吸收冲击。
[0239]
如上所述,由于能够进行手100的各种动作,因此能够提高手100的动作的灵活性。
[0240]
并且,在机器人1100中,由于能够减少机器人臂1110的动作量,因此能够简化机器人1100的控制。
[0241]
并且,机器人系统1000包括手100和控制部1200,所述控制部1200控制手100。控制部1200执行推按动作、卡止动作和移动动作,在所述推按动作中,将第一部分22的前端22a推按到轴承座230的凸缘232的端面232a(工件的表面),使第一部分22缩回,在所述卡止动作中,沿着端面232a使因推按动作而缩回的状态的第一部分22的前端22a滑动,以使第一部分22卡止在形成在凸缘232的、凹于端面232a的锪孔234(卡止部),在所述移动动作中,通过使因卡止动作而卡止的状态的第一部分22移动,来使轴承座230移动。
[0242]
并且,手100的控制方法包括将第一部分22的前端22a推按在轴承座230的凸缘232的端面232a(工件的表面)而使第一部分22缩回的步骤、沿着端面232a使缩回的状态的第一部分22的前端22a滑动来使第一部分22卡止在形成在轴承座230的凸缘232的、凹于端面232a的锪孔234(卡止部)的步骤和通过使卡止在锪孔234的状态的第一部分22旋转(移动)来使轴承座230旋转(移动)的步骤。
[0243]
根据这些结构,由于在第一部分22设置有缓冲机构25,因此第一部分22因将第一部分22推按到端面232a而成为缩回的状态。并且,在端面232a中使缩回状态的第一部分22滑动到锪孔234的位置。这里,由于锪孔234凹于端面232a,因此缩回的第一部分22通过缓冲机构25朝向锪孔234侧伸长,卡止在锪孔234。并且,通过使卡止在锪孔234的第一部分22移动,能够使轴承座230移动。像这样,能够通过缓冲机构25使第一部分22自动地卡止在锪孔234,从而能够使轴承座230移动。因此,即使不用两个第一手指21握持,也能够用简单的方法构筑使工件(轴承座230)移动的方法。
[0244]
并且,关于第一部分22的旋转角度θb,通过将其设定为大于通孔233的螺距角θa的
值,能够在使第一手指21旋转旋转角度θb期间使第一手指21一定卡止在通孔233(锪孔234)。并且,由于在卡止动作之后进行移动动作,因此关于旋转角度θb,通过将其设定为第一手指21旋转(移动)到规定位置的值,能够使轴承座230旋转到规定位置。像这样,通过设定第一手指21的旋转角度θb,即使不检测通孔233、螺丝孔225、第一手指21的位置,也能够进行轴承座230的定位。
[0245]
并且,在手100中,两个第一手指21构成为在开闭方向a中彼此独立地移动。
[0246]
根据所述结构,由于能够使两个第一手指21独立动作,因此能够实现偏心握持。也就是说,能够根据工件的位置,调整两个第一手指21的每一个的移动量,在从中心(可动范围的中心q)偏心的位置握持工件。因此,即使在两个第一手指21的间隔的中心与工件的中心偏离时,也能够适当握持工件。由于能够进行这样的偏心握持,因此不必高精度地检测工件的位置。
[0247]
并且,在手100中,弯曲机构4使握持有工件(螺栓240、转轴250)的状态的两个第一手指21弯曲,使工件移动到工件的规定的移交位置。
[0248]
根据所述结构,通过使两个第一手指21弯曲,能够使所握持的工件移动到工件的移交位置。因此,能够减少机器人臂1110的动作量。
[0249]
并且,在手100中,第一部分22具有固定部分26和可动部分27,所述固定部分26可旋转地连接在第二部分23,所述可动部分27经由缓冲机构25连接在固定部分26,通过向延伸方向c2移动,使第一部分22伸缩。并且,缓冲机构25具有滚珠花键28(引导部件)和弹簧29(弹性部件),所述滚珠花键28具有通过滚动将可动部分27向延伸方向c2引导的滚动体,所述弹簧29弹性支撑可动部分27。
[0250]
根据所述结构,即使是握持力向与延伸方向c2正交的开闭方向a作用在第一部分22的状态,也能够使第一部分22在延伸方向c2顺畅地伸缩。因此,即使在握持有工件w的状态的第一手指21中,也能够获得延伸方向c2的缓冲功能。并且,由于使用滚珠花键28,因此能够阻止可动部分27围绕延伸方向c2(即,围绕滚珠花键28的轴)旋转。这样一来,由于能够在可动部分27中使握持工件w的面、支撑面21a保持恒定,因此能够稳定地进行工件w的握持动作以及移交动作。
[0251]
(其它实施方式)
[0252]
如上所述,将所述实施方式作为在本技术中公开的技术的例子进行了说明。但是,本公开的技术并不限定于此,还能够适用于进行了适当改变、置换、附加、省略等的实施方式。并且,还能够将在所述实施方式中所说明的各个构成要素进行组合作为新的实施方式。并且,在记载在附图以及详细说明的构成要素中不仅包含了为解决课题所必须的构成要素,为了对所述技术举例,还可能包含了不是为解决课题所必须的构成要素。因此,不应该以那些不是必须的构成要素被记载在附图以及详细说明中,而立刻认为那些不是必须的构成要素是必须的。
[0253]
所述实施方式的第一手h1并不限定于上述动作,还能够进行以下的动作。
[0254]
例如,控制部1200能够通过第一手h1将载置在载置台s的工件w滑动移动到规定位置。控制部1200与所述实施方式一样,使第一手h1执行推按动作、卡止动作以及移动动作。如图40所示,在推按动作中,两个中的一个第一手指21的前端被推按到工件w的上表面(表面)。没有被推按到工件w的另一个第一手指21位于工件w的外侧。这里,将被推按到工件w的
第一手指21称为一个第一手指21,将没有推按到工件w的第一手指21称为另一个第一手指21。具体而言,在一个第一手指21中,可动部分27的前端被推按到端面232a。在该状态下,可动部分27成为向固定部分26侧缩回的状态。另一个第一手指21的可动部分27成为通常状态。通过上述内容完成推按动作。
[0255]
接着,在卡止动作中,第一手h1向与载置台s平行的方向移动,两个第一手指21也随之向相同方向移动。此时,一个第一手指21对于工件w的上表面滑动。更详细而言,第一手h1移动,以使一个第一手指21朝向形成在工件w的上表面的卡止部wa滑动。卡止部wa凹于工件w的上表面。并且,如图41所示,一个第一手指21在移动到卡止部wa的位置时,通过弹簧29伸长而进入卡止部wa。也就是说,在一个第一手指21中,可动部分27通过弹簧29向卡止部wa侧移动。因此,一个第一手指21卡止在卡止部wa,工件w成为能够与第一手指21一起移动的状态。通过上述内容完成卡止动作。
[0256]
接着,在移动动作中,第一手h1进一步向与卡止动作时相同的方向移动。这样一来,工件w也与第一手指21的移动一起向相同方向移动。也就是说,工件w通过第一手h1在载置台s滑动移动规定距离。通过上述内容完成移动动作。这样,控制部1200能够使载置台s的工件w滑动移动到规定位置。需要说明的是,在该例子中,使两个中的一个第一手指21卡止在工件w的卡止部wa,并不限于此,也可以使两个第一手指21都卡止在工件的卡止部。那时,在工件的上表面设置与两个第一手指21的每一个相对应的卡止部。
[0257]
并且,所述实施方式的第一手h1即使在工件w的载置台s倾斜时,也能够适当地握持工件w。如图42所示,机器人臂1110使第一手h1下降,使第一握持部2的第一手指21接触载置台s。此时,两个第一手指21成为沿着垂直方向延伸的状态。并且,两个第一手指21成为工件w放置在之间,在载置台s的倾斜方向排列的状态。当两个第一手指21分别接触到载置台s时,可动部分27在延伸方向c2向固定方向26侧移动。该可动部分27的移动量在两个第一手指21不同。具体而言,可动部分27的移动量在载置台s的倾斜方向位于较高侧的第一手指21(以下,还称为较高侧的第一手指21)多于位于较低侧的第一手指21(以下,还称为较低侧的第一手指21)。因此,在两个第一手指21的每一个中,可动部分27的移动量根据载置台s的高度而被调整。
[0258]
并且,如图43所示,两个第一手指21在开闭方向a中向彼此接近的朝向移动,最终接触到工件w。这样一来,工件w被两个第一手指21握持。当每个第一手指21向彼此接近的朝向移动时,每个第一手指21的可动部分27向延伸方向c2移动。具体而言,较高侧的第一手指21的可动部分27随着较高侧的第一手指21移动而向载置台s侧移动。较低侧的第一手指21的可动部分27随着较低侧的第一手指21移动而向固定部分26侧移动。像这样,由于在两个第一手指21的每一个独立设置有缓冲机构25,因此能够随着两个第一手指21移动,使每个可动部分27追随载置台s的倾斜面。因此,即使在倾斜的载置台s中,也能够使两个第一手指21顺畅地移动,能够适当地握持工件w。
[0259]
并且,如图44所示,所述实施方式的第一手h1即使在将所握持的工件w1安装在沿垂直方向延伸的安装板w2上时,也能够适当地吸收作用在第一手指21的冲击。详细而言,第一手h1使握持有工件w1的延伸状态的两个第一手指21弯曲。接着,机器人臂1110使第一手h1移动,使工件w1接触到安装板w2(推按)。在该例子中,第一手指21的前端也与工件w1一起接触到安装板w2(参照图40)。当工件w1接触到安装板w2时,在第一手指21中,可动部分27在
延伸方向c2中向规定部分26侧移动。也就是说,即使第一手指21弯曲,第一部分22的缓冲方向也不变。因此,能够通过缓冲机构25吸收工件w1(第一手指21)接触到安装板w2时的冲击。因此,此时也能够使第一手h1以高速移动到安装板w2的位置,不必高精度地进行安装板w2的位置检测。像这样,由于缓冲机构25被设置在第一部分22,因此能够使缓冲方向追随第一部分22发生变化。故而,即使在所述的那样的情况下,也能够适当地吸收冲击。
[0260]
并且,所述实施方式的手100即使在省略了弯曲机构4时,也能够同样进行上述的工件的定位作业。
[0261]
并且,在所述实施方式中,开闭机构3也可以使两个第一手指21连动移动。
[0262]
并且,所述实施方式的手100也可以被组装入机器人1100之外的装置中。
[0263]
并且,所述实施方式的手100包括第一手h1和第二手h2,也可以不包括第二手h2。
[0264]
并且,在所述实施方式的缓冲机构25中,作为滚动体使用了设置有滚珠的滚珠花键28,并不限于此,作为滚动体也可以使用例如设置有滚珠、辊或滚柱的引导部件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。