1.本发明涉及一种在洁净室内操纵容器的装置,该装置具有权利要求1的序言的特征,还涉及一种具有权利要求11特征的系统、一种具有权利要求12特征的洁净室以及一种具有权利要求13特征的在洁净室内操纵容器的方法。
背景技术:
2.在现有技术中,在无菌环境中操纵和固定药品容器(例如西林瓶、注射器、筒(karpulen))或包装材料(例如盆、盘、巢件、特卫强膜)是基于通过真空或通过具有形状配合和非形状配合连接的机械抓取(气动或电动抓取器)来产生保持力。
3.以前已知的和可用的操纵或固定药品对象或包装材料的解决方案具有各种缺点,当它们在无菌环境中使用时(例如药品计量系统的隔离器),这些缺点尤其相关。
4.用真空操纵或固定有多个缺点,特别是在操纵有毒/高效力活性物质时,以及在机器人/操纵设备上使用时。
5.在机器安装完毕后,必须确保用h2o2(过氧化氢)进行去污循环,h2o2也流经真空通道,真空通道因此被去污。由于有时一个组件上有多个吸盘(例如多个西林瓶的抓取器),所以很难确保有足够的h2o2通过所有吸盘。在有毒和高效力活性物质的情况下,必须额外提供过滤器,以防止例如活性物质的气溶胶由于真空而从隔离器的内部传到外部。
6.在有毒和高效力活性物质的情况下,拆卸机器也是一个挑战,因为各部件/组件的真空管道有可能被活性物质污染,直到过滤器,而这些在用水冲洗时无法冲到。
7.因此,整个部件/组件必须由操作者使用手套口手动装入密封袋中,随后单独清洗,或者例如由机器人通过端口或锁定系统自动卸载。当在例如机器人或操纵装置(例如用于操纵药品容器)上使用具有吸盘的经典真空抓取器时,真空也有一个显著的缺点,即机器人/操纵装置的运动自由受到真空管道的明显限制。一方面,必须防止真空管道与机器人/操纵装置摩擦并产生颗粒,另一方面,必须防止真空管道从机器人/操纵装置上伸出太远,使机器人与系统中的其它工位发生碰撞或被夹住。这个缺点也存在于气动或电动驱动的抓取器中。
8.以前的解决方案是基于机械抓取/固定的,其缺点是,例如很难用机械抓取器从托盘中取出倒置的西林瓶,因为西林瓶在托盘中紧靠在一起。在这种情况下,机械抓取器必须另外适配待抓取的物体(例如具有特定直径的西林瓶)。
9.此外,机械抓取还有一个缺点,即抓取运动(例如抓取器行程)需要辅助能源(例如电能或压缩空气),而这又需要机器人/操纵装置上的线路。
技术实现要素:
10.本发明的目的是提供一种用于在洁净室内操纵容器和/或包装材料的装置、包括相应装置的系统、具有相应装置的洁净室以及在洁净室内操纵容器和/或包装材料的方法,
它们克服了上述的缺点。
11.本发明允许在无菌环境中以简单和安全的方式操纵和固定药品容器(例如西林瓶、注射器、筒)或包装材料(例如盆、盘、巢件、特卫强膜)。
12.下文主要提到了容器,但这些实施例也适用于包装材料的固定和/或操纵。
13.上述目的是通过一种用于在洁净室(例如制药机的隔离器)内、特别是在无菌环境中操纵容器的装置实现的,其中,该装置包括:
14.具有至少一个工具的抓取器,其可以设计成机械臂,并且例如可以是通过气动、电动或液压来移动。
15.该工具具有至少一个接触表面。该接触表面设计成能够在一平面区域内接触至少一个容器和/或包装材料。
16.容器特别是药品容器、例如西林瓶、注射器或筒。
17.粘附结构的聚合物膜至少部分地布置在接触表面上。替代地,接触表面可以具有粘附结构的聚合物表面、特别是聚合物涂层。特别是,粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层可以覆盖整个接触表面。
18.粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层设计成使被接触的容器由于分子间的作用力、特别是范德瓦尔斯相互作用而粘附到粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层。换句话说,容器与粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层之间的分子间作用力、特别是范德瓦尔斯作用力使容器被固定。
19.粘附结构的聚合物膜或粘附结构的聚合物表面可以具有例如微观结构和/或介观结构。也可以设想提供宏观结构,其导致由于分子间的作用力、特别是范德瓦尔斯相互作用的粘附。表面的相应结构化、特别是微观结构和/或介观结构,使结构或膜或表面与被持物之间的分子间力、特别是范德瓦尔斯相互作用增加。
20.因此,在操纵(例如固定、运输)容器时,不需要以真空、压缩空气或电能等形式的辅助能源。用于电流或压缩空气的额外线路(供应线路)是多余的。这简化了该装置在洁净室中的使用、特别是在无菌环境中的使用。额外的线路代表了洁净室(或隔离器)与环境之间的接口,因此是潜在的薄弱点,必须通过额外的(结构)修改来隔离/控制。
21.例如,该装置可用于从托盘中取出倒置的容器、例如西林瓶。为此,可将粘附在机械工具或移动的机器部件上的粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层以一定的压力压靠在西林瓶的基座上并持续一定的时间。
22.粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层由于范德瓦尔斯力的作用而粘附在玻璃上,倒置的西林瓶可以被从托盘中取出并进一步运输、翻转和/或分拣到另一巢件。
23.为了使粘附在粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层上的容器脱离,工具或接触表面可以成一定角度。这就改变了聚合物膜或聚合物表面、特别是聚合物涂层的微观结构与被接触的容器表面之间的角度,从而使范德瓦尔斯键被打破(参照壁虎效应)。
24.该装置可用于运输药品容器(例如西林瓶、注射器或筒)。在这种情况下,粘附结构的聚合物膜或胶粘剂结构的聚合物表面、特别是聚合物涂层可以产生以前由真空或机械抓
取产生的保持力。
25.该装置还可用于在将西林瓶从巢件中取出时稳定/固定西林瓶(例如用于脱模、剔除或采样)。这对高且细(例如4r格式)的西林瓶来说可能特别重要。
26.根据一种发展,粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层可以由硅胶制成。因此,简单的生产、例如通过注射成型是可能的。此外,硅胶可以很容易地进行清洗和消毒。此外,硅胶具有弹性,因此可以尽可能轻柔地接触容器。因此,可以避免对待操纵的容器的损害(例如划痕或玻璃破裂)。
27.根据一种发展,该工具和/或粘附结构的聚合物膜可以设计成可更换的部分或一次性部件。这样就可以在出现污染、损坏和/或磨损的情况下轻松更换。这使其更容易继续满足操纵药品容器时对无菌环境的高要求。
28.根据一种发展,粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层可以设计成耐h2o2(耐过氧化氢)和/或耐压耐热灭菌。因此,可以通过h2o2或高压高热灭菌器实现去污。因此,粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层可以以简单和安全的方式进行去污或消毒,这优化了该装置在无菌环境中的使用。
29.根据一种发展,该工具可以具有至少一个弹性元件。至少一个弹性元件可以设计成弹簧的形式、例如盘簧或螺旋形弹簧。在这种情况下,接触表面可以通过弹性元件被预紧,因此施加在接触表面上的力与弹性元件的恢复力相对抗。换句话说,接触表面可以设计成相对于工具而言具有弹性。因此,长度公差(例如在玻璃西林瓶的情况下)和装置的定位不准确可以得到补偿。
30.根据一种发展,该工具可以是销状的。接触表面可以布置在销状工具的一个端部处。这样就可以操纵紧紧挤在巢件或托盘内的非常薄的容器。优选地是,销状工具的厚度(或直径)小于待操纵的容器的厚度(或直径)。因此,可以确保与待操纵的容器相邻的容器不会因操纵而被损坏。
31.根据一种发展,接触表面可以设计成平面、特别是圆形。这有利于容器在其基座上的接触,而基座大多是平面的、特别是圆形的。因此,整个基座或至少是基座表面的大部分可以与粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层接触。由于在容器上的接触表面较大,更强的范德瓦尔斯力可以发挥作用,因此可以确保安全操作。也可以想象,多个容器能够同时通过粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层接触它们的基座。
32.根据一种发展,接触表面可以设计成部分圆柱形、半圆柱形、特别是半圆圆柱形(接触表面相当于圆柱形、半圆柱形、特别是半圆圆柱形的侧表面的一部分)。这有利于容器在其大部分圆柱形、特别是圆形圆柱体上的接触。优选地是,接触表面的曲率与被接触的容器的曲率相对应。特别是,接触表面的曲率的延伸部分相当于容器在被接触的区域内的一半周长。因此,容器的大片区域可以与粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层接触。由于在容器上的接触表面较大,更强的范德瓦尔斯力可以发挥作用,因此可以确保更安全的操作。
33.根据一种发展,该工具可以设计成同时接触多个容器、特别是布置在巢件或托盘中的多个容器。每个被接触的容器都可以与工具的接触表面接触。因此,巢件或托盘中的多个、特别是所有的容器可以以一种特别快速和简单的方式被移除、操纵和/或放置在巢件或
托盘中。
34.根据一种发展,接触表面可以布置在工具的柔性和/或可变形部分。因此,接触表面可以通过被按压来适配容器的轮廓。因此,不同形状的容器可以用同一个工具来操纵,并且该装置可以更灵活地使用。容器上待被接触的表面的不平整(例如容器基座的凹陷、凸起)可以因此得到补偿。
35.所要实现的目标是通过具有权利要求11的特征的系统进一步实现的。该系统包括具有上述特征的装置。该系统还可以包括容器、特别是药品容器、例如西林瓶、注射器或筒。此外,该系统还可以包括巢件、托盘或盆。巢件、托盘或盆的设计可以容纳多个容器。这些容器可以直立和/或倒置地布置在巢件、托盘或盆中。在这种情况下,接触表面设计成与容器互补,使得接触表面可以平放在容器上。特别是,接触表面设计成与容器的平面区域、例如容器的基座或本体互补。
36.关于该系统可以实现的优点,请参考与该装置有关的这方面的陈述。与该装置有关的描述的措施可以为开发该系统服务。
37.所要实现的目标是通过具有权利要求12的特征的洁净室进一步实现的。该洁净室包括具有上述特征的装置或具有上述特征的系统。
38.关于用该洁净室可以实现的优点,请参考与该装置或该系统有关的这方面的陈述。与该装置或系统有关的描述措施可用于开发洁净室。
39.要实现的目标还可以通过一种在洁净室(例如制药机的隔离器)内、特别是在无菌环境中操纵容器、特别是药品容器、例如西林瓶、注射器或筒的方法实现,其中该方法包括以下步骤:
40.提供与容器接触的接触表面。在这种情况下,粘附结构的聚合物膜至少部分地布置在接触表面上。替代地,接触表面可以具有粘附结构的聚合物表面、特别是聚合物涂层。粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层设计成使得被接触的容器由于范德瓦尔斯相互作用而粘附到粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层;
41.将具有粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层的接触表面压靠在容器上。压靠是以预定的压力在预定的时间段进行的。这确保了聚合物膜或聚合物表面、特别是聚合物涂层的微观结构能够充分适配容器或其表面;
42.待操纵的容器由于范德瓦尔斯力而粘附在粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层上。
43.为了分离粘附在粘附结构的聚合物膜或粘附结构的聚合物表面、特别是聚合物涂层上的容器,可以将接触表面倾斜。这就改变了聚合物膜或聚合物表面(特别是聚合物涂层)的微观结构与别接触的容器表面之间的角度,从而使范德瓦尔斯键被打破(参见壁虎效应)。通过“过压”(过压:个别聚合物纤维被设计成扭结,从而导致脱离)或通过剥离、扭曲或剪切,也可以实现粘附的容器的脱离。
44.根据其它的发展,该方法还可以包括以下步骤:
45.将容器放置在巢件或托盘中和/或从巢件或托盘中取出容器。因此,可以操纵在巢件或托盘中运输的成批的容器。在两个巢件或托盘之间操纵或运输容器也是可以想象的。
46.根据一种发展,具有上述特征的装置或具有上述特征的系统可以用来执行该方
法。替代地,该方法可以在根据权利要求11的洁净室中进行。
附图说明
47.本发明的其它特点、细节和优点来自于权利要求书的措辞和以下参照附图对示范性实施例的描述,其中:
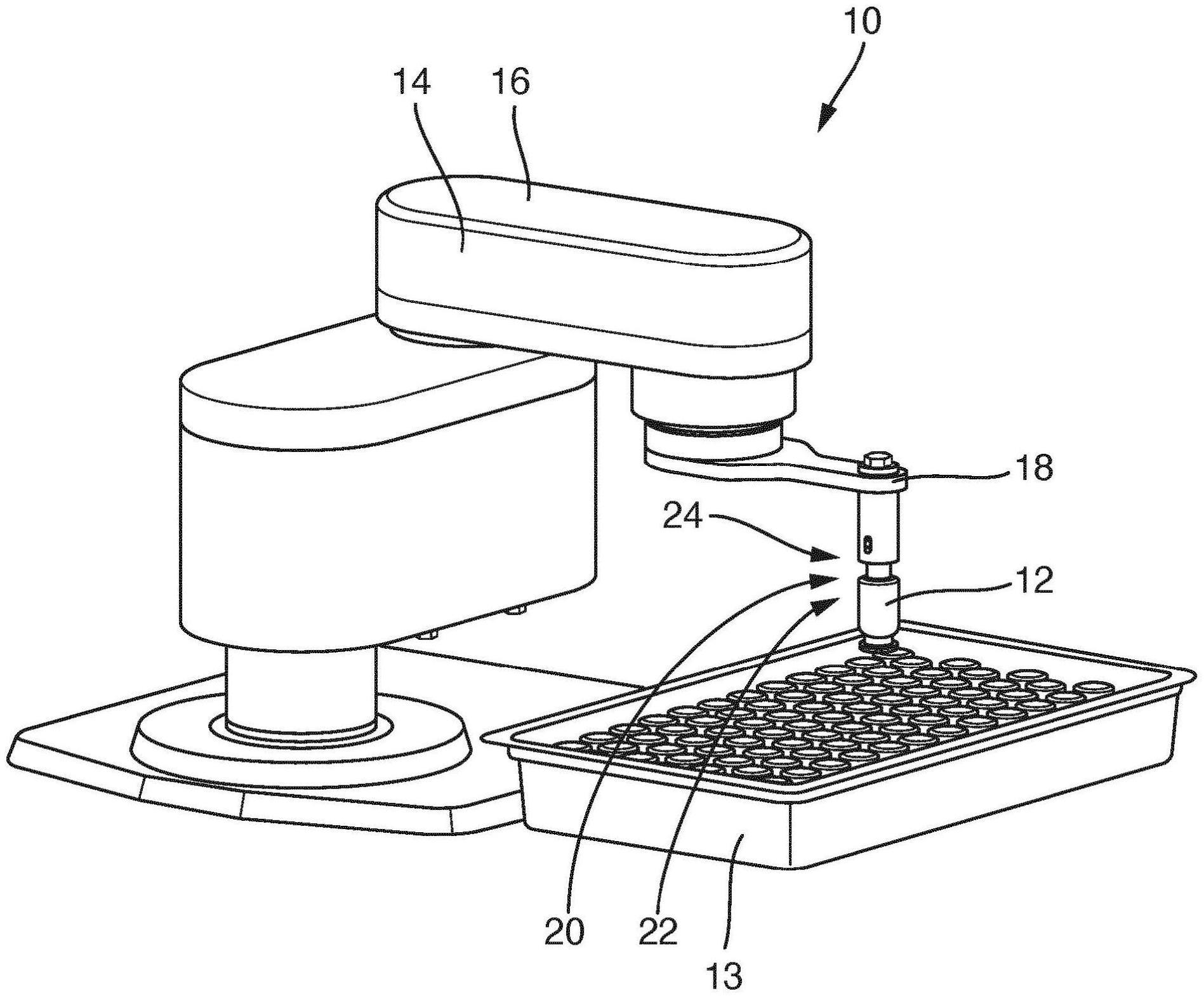
48.图1是装置的透视图;
49.图2是根据图1的装置的工具的透视图;
50.图3是该装置的另一个示例性实施例的透视图;
51.图4是根据图3的装置的工具的透视图;
52.图5是该装置的另一个示例性实施例的透视图;以及
53.图6是根据图5的装置的工具的剖面图。
54.在附图和下面的描述中,相应的部件和元件具有相同的附图标记。为了清楚起见,并非所有的附图标记都在所有的图中示出。
具体实施方式
55.图1是用于在洁净室内操纵容器12的装置10的透视图。该装置10具有抓取器14。在本例中,抓取器设计成机械臂16。抓取器14或机械臂16具有工具18,其布置成抓取器14或机械臂16上的端部执行器。
56.在本例中,容器12、在此是玻璃西林瓶可以用工具18来操纵。在本例中,玻璃西林瓶被倒置在托盘中,托盘是槽形的接收器13,可以通过工具18从托盘中取出玻璃西林瓶并进行操纵。
57.在本例中,多个容器12被紧密地布置在接收器13中(该接收器在本例中设计成托盘)。用抓取工具进行操纵在这种情况下将是一个障碍,该工具通过抓取来操纵容器12。
58.图2是根据图1的装置10的工具18的透视图。该工具18具有接触表面20。在本例中,接触表面设计成平面的和圆形的。在本例中,在接触表面20上布置有粘附结构的聚合物膜22。作为聚合物膜22的替代,接触表面20可以具有粘附结构的聚合物涂层24。
59.聚合物膜22或聚合物涂层24也设计成平面的和圆形的,使得几乎整个接触表面20都被聚合物膜22或聚合物涂层24覆盖。
60.所示的容器12具有平面的、圆形的基座23,聚合物膜22或聚合物涂层24在该基座处接触容器12。由于范德瓦尔斯相互作用,聚合物膜22或聚合物涂层24与接触表面(容器12的基座23)之间发生粘附效应。为此,具有聚合物膜22或聚合物涂层24的接触表面20被以一定的压力在一定的时间段压靠在容器12的基座23上。聚合物膜22或聚合物涂层24的微观结构与容器12的基座23相适配,从而使微观结构与容器12的基座23之间的范德瓦尔斯力能够开始或发挥作用。
61.为了使容器12与聚合物膜22或聚合物涂层24分离,接触表面20相对于容器12或容器12上接触的表面(在所示的示例中,容器12的基座23)成一定角度,这样范德瓦尔斯力就可以被再次释放(参照壁虎效应)。粘附的容器的脱离也可以通过“过压”(过压:个别聚合物纤维被设计成扭结,从而导致脱离)或通过剥离、扭曲或剪切实现。
62.由于保持力是通过范德瓦尔斯力实现的,因此不需要额外的连接/线路来向例如
工具18供应压缩空气或电流以用于抓取/操纵容器12。因此,该装置10特别适合在隔离器中使用,特别是在无菌环境中使用。在此,额外的线路将需在隔离器的无菌环境与环境之间提供额外接口。
63.在本例中,工具18具有至少一个弹性元件26。至少一个弹性元件设计成弹簧28的形式,其在图2中只是用虚线表示。弹簧28对接触表面20进行预紧。如果接触表面20被放置在容器12上,接触表面20就会相应地弹回来。
64.在本例中,工具18具有延伸部17和凹槽19,其中,延伸部17伸入凹槽19。延伸部17和凹槽19作为弹簧28的止挡,限制接触表面20沿工具18的纵向方向15的移动。
65.接触过程中施加在容器12上的压力可以受到上述接触表面20的缓冲作用的影响。此外,例如,容器12的不同高度可以通过缓冲来补偿。
66.接触表面20可以布置在工具18的柔性和/或可变形部分21上。因此,接触表面20可以通过被按压来适配容器12的轮廓。例如,可以补偿容器12的接触区域在一定的公差范围内的不均匀性。
67.在本例中,工具18是销状的。换句话说,工具18具有细长条形的形状,并沿其纵向轴线15延伸。因此,也可以操纵紧密布置在一起的容器12、例如在容器13或巢件30中紧密布置在一起的容器。
68.图3是该装置10的另一个示例性实施例的透视图。在这个实施例中,抓取器14也设计成机械臂16的形式。在本例中,工具18设计成能够同时操纵五个容器12。为此,工具18具有五个接触表面20,它们均具有粘附结构的聚合物膜22,或涂有粘附结构的聚合物涂层24。在本例中,所有五个接触表面20都是相同的。当然,也可以想象接触表面20的设计是不同的,例如,为了操纵不同的容器12或不同形状和/或形式的容器12。
69.图4是根据图3的装置10的工具18的透视图。图中示出了五个相同的接触表面20中的一个。接触表面20的形状是半圆圆柱体。容器12具有本体25,其同样具有半圆圆柱体的形状。因此,接触表面20可以最佳地适配容器12的本体25的半圆圆柱形。
70.图5是该装置10的另一个示例性实施例的透视图。在这个实施例中,与上述两个实施例类似,抓取器14设计成机械臂16的形式。
71.在本例中,容器12直立地布置在巢件30中。工具18是销状的并沿着纵向轴线15纵向延伸。工具18设计成在基本为平面的基座23与容器12接触。接触表面20相应地设计成一平面。
72.图6是根据图5的装置10的工具18的剖面图。在该剖面图中,还示出了巢件30和直立地布置在巢件30中的其它的容器12。
73.容器12可以通过销状工具18被从巢件30下面取出。在这种情况下,待操纵或取出的容器12是通过粘附结构的聚合物膜22或粘附结构的聚合物涂层24固定在工具18上。
74.由于工具18的销状形状,容器12可以被从相邻的容器12之间取出,而相邻的容器12不会成为操纵/取出容器12的障碍。
75.在图示的实施例中,只示出了用于操纵容器12的单一销状工具18。当然,可以想象的是,为了同时操纵多个容器12,可以提供多个销状工具18。这同样适用于图1和图2中所示的示范性实施例。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。