1.本实用新型涉及无人化除湿领域,具体为一种用于预制舱的无人化巡航除湿机器人。
背景技术:
2.在预制舱中往往设有柜式空调、挂式壁空调等等手段去解决预制舱内湿度过高的情况,尤其是在南方遇到雨水天气时,湿度数值上涨更加明显,潮湿的环境对机柜和机柜内部设备都存在着隐患,预制舱内温湿度监控系统的标准也不同,并且人工进行查看再进行除湿工作,耽误时间需要付出更多的功率损耗。
3.基于上述现有技术的不足,本实用新型实际要解决的问题是:
4.1、如何在预制舱除湿工作上做到无人化实施;
5.2、如何替代现有除湿空调等设备在除湿工作中各区域除湿分布不均匀的问题;
6.3、如何实时监控区域湿度,并有针对性的进行除湿工作。
技术实现要素:
7.针对现有技术的不足,本实用新型提供了一种用于预制舱的无人化巡航除湿机器人,以解决上述问题。
8.为实现以上目的,本实用新型通过以下技术方案予以实现。
9.一种用于预制舱的无人化巡航除湿机器人,包括巡航车、除湿机,所述巡航车包括巡航车主体、车轮、前端巡航颜色传感器、后端校正颜色传感器、防静电拖条、湿度检测装置,所述巡航车主体设置在除湿机下部,所述车轮与巡航车主体连接,所述前端巡航颜色传感器与后端校正颜色传感器分别设置在巡航车主体底部,所述防静电拖条设置在巡航车主体车尾位置,所述湿度检测装置设置在巡航车主体车头上侧斜面处,所述除湿机包括除湿机壳体、潮湿空气入口、处理空气出口、蒸发器、冷凝器、水箱、压缩机、电机、风鼓连接出口、风鼓,所述除湿机壳体与巡航车主体连接,所述蒸发器位于潮湿空气入口的后侧,蒸发器的上端固定在除湿机壳体上,另一端与压缩机连接,所述冷凝器位于蒸发器后方,一端与风鼓固定连接,另一端连接压缩机,所述电机与风鼓连接。
10.优选的,所述前端巡航颜色传感器至少设置两个,且位于巡航车主体的底部偏车头位置,用于纠正巡航路线,正常巡航情况下以前端巡航颜色传感器检测数值为主。
11.优选的,所述后端校正颜色传感器至少设置两个,且位于巡航车主体的底部偏车尾位置,若后端校正颜色传感器数值发生变化,也就是在前端巡航颜色传感器发生偏差时,以后端校正颜色传感器为主。
12.优选的,所述巡航车还包括湿度数值显示屏、操作键盘,所述湿度数值显示屏设置在湿度检测装置一侧,所述操作键盘设置在湿度检测装置另一侧,操作键盘按照实际需求调整湿度的数值范围,数值范围会显示在湿度数值显示屏上。
13.优选的,所述水箱位于蒸发器下方。
14.优选的,所述潮湿空气入口设置在除湿机壳体上,且位于蒸发器的前侧。
15.优选的,潮湿空气入口上设有过滤网。
16.优选的,所述处理空气出口的开口向上,向上排出处理过的干燥气体。
17.优选的,所述风鼓连接出口上端与处理空气出口连接,下端与风鼓连接。
18.优选的,所述巡航车主体内部设有蓄电池,蓄电池与巡航车上所有用电设备连接,并在工作时持续供电。
19.相对于现有技术,本实用新型的装置的有益效果在于:一种用于预制舱的无人化巡航除湿机器人包括巡航车、除湿机,
20.1、巡航车可通过前端巡航颜色传感器与后端校正颜色传感器相互配合,根据照射预制舱内地面预设的带有颜色的胶带反馈过来的数值,使巡航车按照规划路线行驶,做到了无人化的操作;
21.2、上部除湿机的湿度检测装置会根据工作前的湿度预设范围对行驶路径上的超范围环境进行除湿工作;
22.3、巡航车行驶路线为一个循环路线,在内部蓄电池电力充足的条件下可在循环路线内不断的对预制舱各个区域的湿度环境进行调节。
附图说明
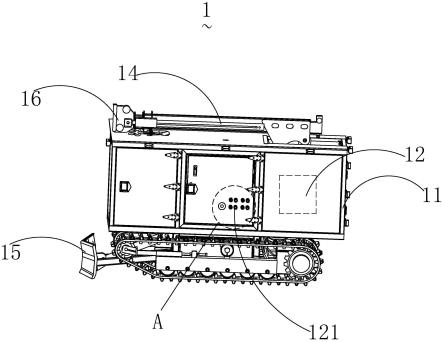
23.图1为本实用新型一种用于预制舱的无人化巡航除湿机器人的结构示意图;
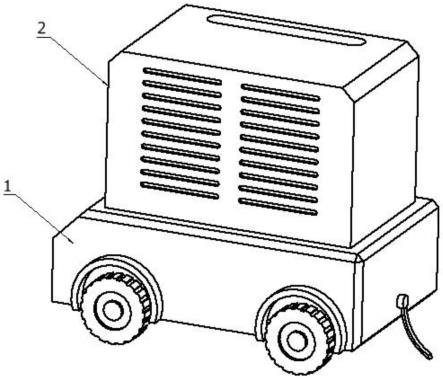
24.图2为本实用新型一种用于预制舱的无人化巡航除湿机器人的结构示意图;
25.图3为本实用新型巡航车的结构示意图;
26.图4为本实用新型一种用于预制舱的无人化巡航除湿机器人的结构示意图;
27.图5为本实用新型除湿机的结构示意图。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
29.实施例1
30.一种用于预制舱的无人化巡航除湿机器人,包括巡航车1、除湿机2,所述巡航车1包括巡航车主体11、车轮12、前端巡航颜色传感器13、后端校正颜色传感器14、防静电拖条15、湿度检测装置16,所述巡航车主体11设置在除湿机2下部,所述车轮12与巡航车主体11连接,所述前端巡航颜色传感器13与后端校正颜色传感器14分别设置在巡航车主体11底部,所述防静电拖条15设置在巡航车主体11车尾位置,避免静电的产生对预制舱机柜造成损害,所述湿度检测装置16设置在巡航车主体11车头上侧斜面处,所述除湿机2包括除湿机壳体21、潮湿空气入口22、处理空气出口23、蒸发器241、冷凝器242、水箱25、压缩机26、电机27、风鼓连接出口28、风鼓29,所述除湿机壳体21与巡航车主体11连接,所述蒸发器241位于潮湿空气入口22的后侧,蒸发器241的上端固定在除湿机壳体21上,另一端与压缩机26连接,所述冷凝器242位于蒸发器241后方,一端与风鼓29固定连接,另一端连接压缩机26,所述电机27与风鼓29连接。在巡航车1在预制舱内行驶路径上会预先贴设黑色胶带,黑色胶带
的宽度为15cm,用作指示巡航车1的巡航线路,所述前端巡航颜色传感器13设置两个,且位于巡航车主体11的底部偏车头位置,两个之间空出黑色胶带宽度的相切距离,两个前端巡航颜色传感器13相互配合一侧前端巡航颜色传感器13的检测值超出预设范围时,调整对立侧车轮12的动力,纠正巡航路线,另一端前端巡航颜色传感器13纠正方法一致,相互配合不断调整车轮12动力,及时纠正巡航路线,保证工作质量,所述后端校正颜色传感器14设置两个,且位于巡航车主体11的底部偏车尾位置,两个之间空出黑色胶带宽度的相切距离外加一个黑色胶带宽度的距离,两个后端校正颜色传感器14相互配合一侧后端校正颜色传感器14的检测值超出预设范围时,调整对立侧车轮12的动力,纠正巡航路线,另一端后端校正颜色传感器14纠正方法一致,相互配合不断调整车轮12动力,及时校正巡航路线,在巡航过程中正常运行的情况下,是以前端巡航颜色传感器13的值为主来调整车轮12动力,当遇到特殊情况前端巡航颜色传感器13出现偏差时以后端校正颜色传感器14为主进行校正。所述巡航车1还包括湿度数值显示屏17、操作键盘18,所述湿度数值显示屏17设置在湿度检测装置16一侧,所述操作键盘18设置在湿度检测装置16另一侧,操作键盘18按照实际需求调整湿度的数值范围,数值范围会显示在湿度数值显示屏17上。所述潮湿空气入口22设置在除湿机壳体21上,且位于蒸发器241的前侧,潮湿空气入口22上设有过滤网。所述处理空气出口23的开口向上,向上排出处理过的干燥气体。所述风鼓连接出口28上端与处理空气出口23连接,下端与风鼓29连接。所述巡航车主体11内部设有蓄电池,蓄电池与巡航车1上所有用电设备连接,并在工作时持续供电。
31.工作模式:工作之前在预制舱的地面上规划巡航车1行驶路线,并铺设黑色胶带,通过操作键盘18调整好周围湿度需工作的数值范围,巡航车1开始工作,前端巡航颜色传感器13与后端校正颜色传感器14相互配合,前端巡航颜色传感器13保证巡航车1正常工作情况下,依照地面黑色胶带的路线前进,但遇到特殊情况时是以后端校正颜色传感器14的数值为主,及时校正巡航车1行驶路线,行驶过程中湿度检测装置16实时监测湿度数值,并反馈给除湿机2,除湿机2接收到工作信号后,巡航车1原地停下,除湿机2的电机27和压缩机26开始工作,电机27带动风鼓29将周围潮湿空气吸入机内,通过与压缩机26连接的蒸发器241与冷凝器242,蒸发器241冷凝空气中多余的水分并流入水箱25,再经过冷凝器242升温,加热后的干燥空气通过风鼓连接出口28和处理空气出口23被吹出除湿机2外,湿度检测合格后巡航车1进行按照规划路线行驶。
32.实施例2
33.地面铺设的胶带颜色和宽度不唯一,颜色可根据室内亮度及前端巡航颜色传感器13、后端校正颜色传感器14检测的数值为准,但前提整条巡航路线上的颜色要保持一致,宽度可根据两个前端巡航颜色传感器13之间的距离进行调整。
34.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。