1.本发明涉及探测仪器技术领域,尤其涉及一种矿用伸缩式测风机器人。
背景技术:
2.目前我国煤矿开采大多都是在深井下进行,工作环境相对比较恶劣,需要时刻谨防空气中瓦斯与有害物质浓度过高,因此矿井通风工作显得尤为重要。矿井通风系统需要根据采掘工作面的变化情况,监测巷道的总进风量、总回风量及各用风点的风量与风速等情况,及时调节风量大小,以保证各用风地点新鲜空气充足,保证安全正常生产。
3.现有矿井中对于风速的测量还是主要通过人工方式,优点是采用的测风装置简单,方法成熟,缺点是劳动量大,效率低,测风精度受人为因素影响较大,数据传输滞后,导致控制中心无法及时制定合理的通风策略。现有自动化测风装置有多点移动式测风装置,由丝杆作为传动装置,控制风速传感器精确运动,进行巷道平均风速测量,此装置存在井下安装工作量大,占用空间尺寸大的缺点。
技术实现要素:
4.本发明要解决的技术问题是:为了解决现有技术中矿井风速测量装置安装工作量大、占用空间尺寸大的技术问题,本发明提供矿用伸缩式测风机器人,能够代替人工实现智能自动化测风工作,设计的伸缩变幅机构结构紧凑,井下安装方便,可适应多种巷道尺寸,并可对巷道断面上的不同位置进行测量,进一步提高了巷道测风精度与智能化水平。
5.本发明解决其技术问题所采用的技术方案是:一种矿用伸缩式测风机器人,包括底座,所述底座设于矿井巷道侧壁上;伸缩机构,所述伸缩机构与底座铰接;伸缩驱动件,所述伸缩驱动件的一端与回转机构铰接,另一端与底座铰接;测量机构,所述测量机构设于伸缩机构的移动端上;所述伸缩驱动件与伸缩机构配合使得测量机构在平面上移动,以便测量平面上不同位置所需测量的参数。本发明的矿用伸缩式测风机器人,通过伸缩机构与伸缩驱动件的配合,带动测量机构在巷道断面上移动,便于测量巷道断面上不同位置的情况,且相比于一般的多点移动式测量装置而言,本方案通过伸缩驱动件来改变幅度,可减少整体结构的体积,降低占据的巷道空间,便于收纳,且生产和安装均更为方便。
6.进一步,具体地,所述底座上设有回转机构,所述伸缩机构设于回转机构上,所述伸缩驱动件远离伸缩机构的一端与回转机构铰接。
7.进一步,所述伸缩机构上设有平移机构,所述测量机构设于平移机构上,所述平移机构带动测量机构沿伸缩机构的伸缩方向移动。
8.进一步,所述回转机构包括第一旋转驱动件,所述第一旋转驱动件设于底座上;支撑板,所述支撑板与第一旋转驱动件的输出端连接,所述支撑板与伸缩机构的固定端、伸缩驱动件远离伸缩机构的一端均铰接。
9.进一步,所述伸缩机构包括固定段,所述固定段与底座铰接;第一移动段,所述第一移动段与固定段滑动连接;第一驱动组件,所述第一驱动件设于第一移动段与固定段之
间,所述第一驱动件用于驱动第一移动段相对固定段移动;第二移动段,所述第二移动段与第一移动段滑动连接;第二驱动件,所述第二驱动件设于固定段与第二移动段之间,所述第一驱动件用于驱动第二移动段相对第一移动段移动。
10.进一步,所述第一驱动件包括第二旋转驱动件,所述第二旋转驱动件设于固定段上;滚珠丝杠,所述滚珠丝杠与第二旋转驱动件的输出端连接,所述滚珠丝杠与固定段转动连接;滚珠螺母座,所述滚珠螺母座滑动于固定段上,所述滚珠螺母座与滚珠丝杠螺纹连接,所述滚珠螺母座与第二移动段连接。
11.进一步,所述滚珠螺母座上连接有动力杆,所述动力杆远离滚珠螺母座的一端与第一移动段连接。
12.进一步,所述第二驱动件包括伸出导向轮,所述伸出导向轮设于第一移动段远离底座的一端;缩回导向轮,所述缩回导向轮设于第一移动段靠近底座的一端;伸出拉索,所述伸出拉索的一端与固定段连接,另一端自伸出导向轮上绕过后与第二移动段连接;缩回拉索,所述缩回拉索的一端与固定段连接,另一端自缩回导向轮绕过后与第二移动段连接。
13.进一步,所述平移机构包括第三旋转驱动件,所述第三旋转驱动件与固定段滑动连接,所述第三旋转驱动件与测量机构连接;齿轮,所述齿轮与第三旋转驱动件的输出端连接;齿条,所述齿条设于固定段上,所述齿条与齿轮啮合。
14.进一步,所述测量机构与平移机构之间设有调节组件,所述调节组件包括第一连接板,所述第一连接板与平移机构的移动端连接;第二连接板,所述第二连接板与测量机构连接,所述第二连接板与第一连接板铰接,所述第一连接板与第二连接板通过锁紧螺栓实现锁紧。
15.本发明的有益效果是,
16.1、通过伸缩机构与伸缩驱动件的设置,带动测量机构在巷道断面上移动,可以使得测量机构在巷道断面的任意方向上均可以进行直线或曲线移动,进而适应不同的测量轨迹,便于测量巷道断面上不同位置的情况,且相比于一般的多点移动式测量装置而言,本方案通过伸缩驱动件来改变幅度,可减少整体结构的体积,降低占据的巷道空间,便于收纳,且生产和安装均更为方便;
17.2、通过回转机构的设置,便于调整伸缩机构与伸缩驱动件的整体的角度,进而提升测量的准确性,同时也便于在不测量时,将伸缩机构与伸缩驱动件整体收纳到巷道的一侧;
18.3、通过伸缩机构与平移机构的设置,平移机构可带动测量机构相对伸缩机构移动,便于测量伸缩机构上的各个测量位置,而与伸缩机构配合后,可进一步提升测量机构的测量范围,使得测量机构可以对巷道断面的任意位置进行测量,消除了测量死角,此外,伸缩机构与平移机构双重的同向调整,可以补偿伸缩机构的过度位移,提升测量机构的测量精度,提升测量的灵活性;
19.4、通过伸出拉索与缩回拉索的设置,伸出拉索和缩回拉索除了可以带动第二移动段移动外,还可以相互作用,提升第二移动段移动的稳定性,减少第二移动段因惯性而过度移动的可能,此外也可提升第二移动段的位移精度。
附图说明
20.下面结合附图和实施例对本发明进一步说明。
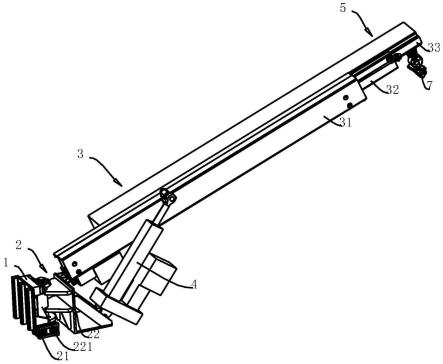
21.图1是本发明中体现矿用伸缩式测风机器人整体的结构示意图。
22.图2是本发明中体现第一驱动件的结构示意图。
23.图3是本发明中体现第二驱动件的结构示意图。
24.图4是本发明中体现平移机构的结构示意图。
25.图5是本发明中体现滑动槽的结构示意图。
26.图6是本发明中体现伸测风运行初始姿态示意图。
27.图7是本发明中体现伸测风运行过程姿态示意图。
28.图8是本发明中体现伸测风运行最终姿态示意图。
29.图中:1、底座;2、回转机构;21、第一旋转驱动件;22、支撑板;221、转动轴;3、伸缩机构;31、固定段;32、第一移动段;321、导向块;33、第二移动段;331、固定板;332、防护罩;3321、滑动槽;34、第一驱动件;341、第二旋转驱动件;342、滚珠丝杠;343、滚珠螺母座;344、动力杆;35、第二驱动件;351、伸出拉索;352、缩回拉索;353、伸出导向轮;354、缩回导向轮;4、伸缩驱动件;5、平移机构;51、滑轨;52、滑动座;53、第三旋转驱动件;54、齿轮;55、齿条;6、调节组件;61、第一连接板;62、第二连接板;63、锁紧螺栓;7、测量机构;8、测风轨迹。
具体实施方式
30.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
31.本实施例公开一种矿用伸缩式测风机器人。
32.参照图1,一种矿用伸缩式测风机器人包括底座1,底座1固定连接于矿井巷道底面的侧壁上,底座1上设有回转机构2,回转机构2上同时铰接有伸缩机构3和伸缩驱动件4,伸缩驱动件4远离回转机构2的一端与伸缩机构3的固定端铰接,伸缩机构3的移动端上则设有平移机构5,平移机构5上则设有测量机构7。工作时,伸缩机构3、伸缩驱动件4与平移机构5相互配合,带动测量机构7在平面上移动,测量不同的位置,尤其便于沿设定的轨迹移动,提升测量的准确性,回转机构2则便于调整伸缩机构3整体的角度,提升测量机构7测量的准确性,同时便于将伸缩机构3、伸缩驱动件4、平移机构5和测量机构7整体收纳。前文所述平面为任一需要测量的平面,可以是管道的截面,也可以是走廊的断面,本实施例中的平面为矿井巷道的断面。
33.回转机构2包括第一旋转驱动件21和支撑板22,第一旋转驱动件21固定连接于底座1上,支撑板22上固定连接有转动轴221,转动轴221与底座1铰接,转动轴221与第一旋转驱动件21的输出端同轴固定。第一旋转驱动件21启动时,可带动转动轴221转动,转动轴221再带动支撑板22转动。第一旋转驱动件21可采用伺服电机与减速机联动的形式,即伺服电机的输出端与减速机的输入端连接,减速机的输出端再与转动轴221同轴固定。
34.参照图1和图2,伸缩机构3包括固定段31、第一移动段32和第二移动段33,固定段31与支撑板22铰接,伸缩驱动件4的一端与支撑板22铰接,另一端则与固定段31的侧壁铰接,前文所说伸缩机构3的固定端即固定段31。伸缩驱动件4可采用电缸。工作时,伸缩驱动件4的伸缩端伸缩运动,带动固定段31绕支撑板22转动,转动角度不小于90度,以便底座1安
装于巷道角落时,固定段31的转动范围将整个巷道断面覆盖。
35.第一移动段32插于固定段31内,且与固定段31滑动连接。固定段31上设有第一驱动件34,第一驱动件34包括第二旋转驱动件341、滚珠丝杠342和滚珠螺母座343,第二旋转驱动件341固定连接于固定段31上,滚珠丝杠342则转动连接于固定段31上,第二旋转驱动件341的输出端与滚珠丝杠342连接,便于带动滚珠丝杠342转动。滚珠螺母座343与滚珠丝杠342螺纹连接,且位于固定段31内。滚珠螺母座343的侧壁上铰接有动力杆344,动力杆344远离滚珠螺母座343的一端伸出固定段31并与第一移动段32的顶面铰接。工作时,第二旋转驱动件341启动,带动滚珠丝杠342转动,滚珠丝杠342驱动滚珠螺母座343移动,滚珠螺母座343再驱使动力杆344移动,进而带动第一移动段32相对固定段31做伸缩运动。第二旋转驱动件341可采用伺服电机与同步带结合的传动的方式,即伺服电机的输出端同轴固定一个同步带轮,滚珠丝杠342上则同轴固定另一个同步带轮,两个同步带轮之间通过同步带实现传动。
36.参照图2和图3,第二移动段33插于第一移动段32内,且与第一移动段32滑动连接。第二移动段33与固定段31之间设有第二驱动件35,第二驱动件35包括伸出导向轮353、缩回导向轮354、伸出拉索351、缩回拉索352,伸出导向轮353设于固定段31远离底座1的一端,且伸出导向轮353与固定段31转动连接,缩回导向轮354设于固定段31靠近底座1的一端,且缩回导向轮354与固定段31转动连接。伸出拉索351的一端与固定段31远离底座1的一端固定连接,另一端则绕过伸出导向轮353与第二移动段33靠近底座1的一端固定连接。缩回拉索352的一端与固定段31远离底座1的一端固定连接,另一端则绕过缩回导向轮354并与第二移动段33靠近底座1的一端固定连接。第一移动段32内沿自身周向固定连接有多个导向块321,多个导向块321将第二移动段33环绕,且均与第二移动段33抵接,便于给第二移动段33导向,提升第二移动段33移动时的稳定性。导向块321沿第一移动段32的长度方向设有多组,以进一步提升第二移动段33移动的稳定性。伸出拉索351和缩回拉索352可采用柔性材料制成,如钢丝绳。
37.当第一移动段32伸出时,由于伸出拉索351本身的长度固定不变,而伸出拉索351在固定段31与伸出导向轮353之间的长度变长,使得伸出拉索351在伸出导向轮353与第二移动段33之间的长度变短,进而使得第二移动段33跟随第一移动段32伸出,且第二移动段33与第一移动段32移动距离相同,实现同步伸出。当第一移动段32缩回时,由于缩回拉索352长度固定不变,缩回拉索352在固定段31与缩回导向轮354之间的长度变长,导致缩回拉索352在第二移动段33与缩回导向轮354之间的长度变短,进而带动第二移动段33缩回,同时第一移动段32与第二移动段33的缩回长度相同,即实现同步缩回。
38.参照图4和图5,第二移动段33的底面上固定连接有固定板331,固定板331上固定连接有防护罩332,平移机构5设于防护罩332内,防护罩332便于对平移机构5进行保护,减少平移机构5出现损坏,同时减少灰尘等杂质的进入。平移机构5包括滑轨51、滑动座52、第三旋转驱动件53、齿轮54和齿条55,滑轨51沿固定板331的长度方向设置,且与固定板331固定连接。滑动座52与滑轨51相适配,且滑动座52与滑轨51滑动连接,第三旋转驱动件53则固定连接于滑动座52上。齿条55沿固定板331的长度方向固定连接于固定板331上,第三旋转驱动件53的输出端与齿轮54连接,齿轮54则与齿条55啮合。工作时,第三旋转驱动件53启动,带动齿轮54转动,齿轮54凭借与齿条55的啮合,带动滑动座52沿固定板331的长度方向
移动。第三旋转驱动件53可采用伺服电机与减速机结合的传动方式,即伺服电机的输出端与减速机的输入端连接,减速机的输出端则与齿轮54同轴固定。
39.滑动座52上设有调节组件6,调节组件6包括第一连接板61、第二连接板62和锁紧螺栓63,第一连接板61与滑动座52固定连接,防护罩332上沿固定板331的长度方向开设有滑动槽3321,第一连接板61位于滑动槽3321内。第一连接板61与第二连接板62铰接,使得第一连接板61与第二连接板62可相对转动,且第一连接板61和第二连接板62可通过锁紧螺栓63实现锁紧。测量机构7固定连接于第二连接板62上,测量机构7可以是风表,便于测量风速。
40.参照图6、7、8,为一种常用的测风轨迹8的模拟,图6中为测量的初始位置,图7中为测量中的一个中间位置,图8则为测量的最终位置。本方案的优势还在于可以适应多种截面的巷道,如圆形、矩形、椭圆形、矩形与半圆形组合的异形等。
41.工作原理:需要测量风速时,第一旋转驱动件21启动,带动支撑板22转动,使得风表总成上的风机的轴线与巷道的长度方向平行。随后第二旋转驱动件341带动第一移动段32和第二移动段33做伸缩移动,伸缩驱动件4则带动固定段31沿巷道的断面转动,二者与第三旋转驱动件53配合,带动测量机构7在巷口断面上按照设定的轨迹移动,对巷道断面的整体风速进行测量。
42.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
