1.本发明涉及液态物料生产技术领域,具体来说,是一种将液态物料输送到灌装工位的、安装在灌装设备上的输送系统。
背景技术:
2.目前,在灌装设备进行装袋工艺(比如生物制品的装袋)时,需要将液态物料定量地装入包装袋内,然后再进行封袋工序。因此,封袋工序之前的灌装工序非常关键,需要保持液态物料装袋过程的可控性。
3.现有的灌装设备中,空载的包装袋的上端口打开,由移动机构水平移动到灌装工位,使得输送液态物料的管道正对包装袋,然后开启相应的阀门,使得液态物料被倒入包装袋内,以便市售。
4.但是,由于液态物料是以倒入的方式注入包装袋内,在若干次重复的灌装过程中液态物料不可避免地产生倒多的现象,而且,灌装过程中液态物料的灌入速率并不可控,影响了灌装质量的稳定性。
技术实现要素:
5.本发明的目的是提供一种液态物料的输送系统,以解决现有技术中存在的“倒多”和“灌入速率并不可控”的问题。
6.本发明的目的是这样实现的:一种液态物料的输送系统,其安装于液态物料灌装的设备顶部,包括:
7.固定于设备顶部的底座;
8.直立的料罐,其上端接通有用于将液态物料输送到料罐之内的进料管;
9.十字管件,其由竖管和横管相互垂直交叉固定连接而成,且在交叉处连通,所述竖管竖直设置,其上端与料罐底部接通,其下端为封闭端并固定于设备顶部,所述横管水平设置;
10.电动阀门,所述电动阀门设置于竖管和横管的连通处;
11.接通于横管一端的、用于将液态物料输送到灌装工位的送料管;
12.布置于横管另一端的推送部件,所述推送部件包括推送杆、导引缸筒、直线驱动机构,所述导引缸筒、直线驱动机构均固定于底座上,所述导引缸筒一端与横管端部固定相连,所述推送杆水平活动地贯穿导引缸筒,其一端与直线驱动机构相接,其另一端作为推送端并穿入横管内,以将液态物料推挤到送料管。
13.其中,所述直线驱动机构包括伺服驱动电机、丝杆、滑块、一对轴端支座,所述轴端支座固定于底座上,所述丝杆水平设置,其两端分别转动连接两个轴端支座,所述伺服驱动电机安装于底座上,所述伺服驱动电机的输出主轴与丝杆同轴固定连接,所述丝杆水平贯穿滑块并与滑块螺纹配合,所述滑块与底座水平滑动配合,所述推送杆与滑块固定连接。
14.本发明的有益效果在于:
15.1、由于液态物料在横管的引导下被水平推挤到送料管中,防止自重造成的急流的影响,以便后续利用推送杆精确推挤液态物料的进程;
16.2、由于采用了丝杆传动的方式来推挤液态物料,使得推送杆的水平移动量处于精准控制的状态,从而使得液态物料的推挤量能够得到更为精确的控制,能够实现精准给料的效果,从而对灌装过程进行精准把控。
附图说明
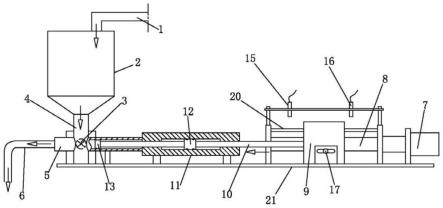
17.图1是本发明的系统布置图。
18.图2是直线驱动机构的设置方案图。
具体实施方式
19.下面结合附图和具体实施例对本发明进一步说明。
20.如图1所示,一种液态物料的输送系统,其安装于液态物料灌装的设备顶部,包括:
21.电控系统;
22.固定于设备顶部的底座21;
23.直立的料罐2,其上端接通有用于将液态物料输送到料罐2之内的进料管1;
24.十字管件,其由竖管4和横管5相互垂直交叉固定连接而成,且在交叉处连通,竖管4竖直设置,其上端与料罐2底部接通,作为料罐2的支撑基础,其下端为封闭端并固定于设备顶部,横管5水平设置;
25.受电控系统控制的电动阀门3,电动阀门3设置于竖管4和横管5的连通处;
26.接通于横管5一端的、用于将液态物料向下输送到灌装工位的送料管6;
27.布置于横管5另一端的推送部件,推送部件包括推送杆10、导引缸筒11、直线驱动机构,导引缸筒11、直线驱动机构均固定于底座21上,导引缸筒11一端与横管5端部固定相连,推送杆10水平活动地贯穿导引缸筒11,其一端与直线驱动机构相接,其另一端作为推送端并穿入横管5内,以将液态物料推挤到送料管6。
28.其中,灌装工位处于整个输送系统的下方,因此,液态物料被推挤后通过送料管6向下输送到下方的灌装工位。
29.如图2所示,直线驱动机构包括伺服驱动电机7、丝杆8、滑块9、一对轴端支座19,轴端支座19固定于底座21上,丝杆8水平设置,其两端分别转动连接两个轴端支座19,伺服驱动电机7安装于底座21上,伺服驱动电机7的输出主轴与丝杆8同轴固定连接,丝杆8水平贯穿滑块9并与滑块9螺纹配合,滑块9与底座21水平滑动配合,推送杆10与滑块9固定连接。
30.本实施例在使用前,先将化学或生物制品通过进料管1输送到料罐2内,电动阀门3暂时先关闭,当料罐2内的液态物料达到一定的液位高度时,打开电动阀门3,使得竖管4内的液态物料能够继续向下流动,以便进入推挤液态物料的环节。
31.本实施例的推挤液态物料的原理如下:伺服驱动电机7带动丝杆8转动,使得滑块9向前移动,滑块9推动推送杆10向前移动,从而将液态物料推向送料管6,使得液态物料从横管5的出料端流出到送料管6内;由于采用了丝杆传动的方式来推挤液态物料,使得推送杆10的水平移动量处于精准控制的状态,从而使得液态物料的推挤量能够得到更为精确的控制,能够实现精准给料的效果,从而对灌装过程进行精准把控。只要电控系统预设了伺服驱
动电机7的动作,即可预设推送杆10的移动量。
32.并且,由于液态物料在横管5的引导下被水平推挤到送料管6中,防止自重造成的急流的影响,以便后续精确推挤液态物料的过程。
33.为了更好地引导滑块9的运动轨迹,直线驱动机构还包括一根引导杆20,引导杆20与丝杆8平行,其两端分别固定连接两轴端支座19,引导杆20活动贯穿滑块9。
34.该输送系统配置有若干传感器,其中包括:
35.第一传感器组,主要是回退终点感应器17,感应器支座18固定在底座21上,回退终点感应器17安装在感应器支座18上,在推送杆10及其滑块9处于回退终点位置时,回退终点感应器17正对滑块9以产生感应信号。
36.第二传感器组,主要是前感应器15和后感应器16,以及固定连接两轴端支座19的感应器支架14,前感应器15和后感应器16均安装在感应器支架14上,设推送杆10的推送方向为前,前感应器15、后感应器16分处滑块9的前、后运动极限位置,回退终点感应器17处于前感应器15和后感应器16之间,且相对靠近后感应器16。
37.在推送杆10完成推送动作后回退时,滑块9移动到回退终点感应器17的位置时,回退终点感应器17产生感应信号,使得伺服驱动电机7停止输出,滑块9停止运动;为了进一步控制推送杆10的前进量,滑块9移动到前感应器15的位置时,伺服驱动电机7停止输出,滑块9停止运动。后感应器16设置的目的则是为了防止滑块9产生运动过位的现象。
38.上述推送杆10的推送端固定有圆形的推送头13,横管5为圆管,推送头13活动地设置于横管5内,推送头13套装有用于密封推送头13与横管5内壁间隙的密封圈。
39.上述推送杆10套装有内置活塞12,内置活塞12处于导引缸筒11的内圆形腔中并随推送杆10进行水平活动,一般活塞12均套装有密封圈,以密封导引缸筒11的内壁与活塞12之间的间隙,在推送头13设置密封圈的基础上,再增加一道密封,形成双重密封,更为彻底地防止液态物料的泄露。
40.以上是本发明的优选实施例,本领域普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本发明总的构思的前提下,这些变换或改进都应当属于本发明要求保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。