1.本发明属于电磁阀控制领域,具体涉及一种基于速度反馈的电磁阀柔性启闭控制方法。
背景技术:
2.电磁开关阀具有高精度、小体积、高可靠性、抗污染、低成本的优点,是数字液压领域的基本控制元件,其高频连续启闭产生的离散流体可以模拟连续流体的行为。其在高频启闭过程中,阀芯每次都以较大的速度撞向阀体,导致撞击时产生较大的噪音和振动,也会造成部件表面磨损,这些不但极大的影响了电磁开关阀的使用寿命,而且会破坏电磁开关阀的密封性能,影响电磁开关阀的控制精度。
3.解决上述问题的最好方法就是提出一种方法,来降低电磁开关阀启闭过程中阀芯与阀体之间的撞击速度。
4.解决上述问题时,现存的研究主要分为两种方式,分别是结构优化方面和控制策略的调整方面。对于结构优化方面,研究通过增加挤压油膜阻尼器来降低电磁阀启闭时刻的撞击速度,但是该方法只能在电磁阀的设计初期才能使用。对于控制策略的调整方面,研究基于阀芯位置测量值或估计值来设计阀芯位置的闭环控制器,但是借助测量参数来估计阀芯位置的闭环控制器存在的位置误差较大。因此解决上述问题的最好方法就是提出一种基于速度反馈的电磁阀柔性启闭控制方法。
技术实现要素:
5.为解决现有技术中的问题,本发明提出了一种基于速度反馈的电磁阀柔性启闭控制方法。
6.本发明的技术方案如下:
7.本发明首先提供了一种基于速度反馈的电磁阀柔性启闭控制方法,所述电磁阀的一个启闭周期至少包括开启阶段、开启维持阶段、关闭阶段和关闭维持阶段;
8.所述控制方法包括如下步骤:
9.1)被控电磁阀的每个阶段分别采用不同的驱动电压进行驱动,各驱动电压通过切换开关的切换接入到被控电磁阀;被控电磁阀上安装磁电式振动速度传感器;磁电式振动速度传感器将被控电磁阀的振动信号转化为反映阀芯运动速度的电信号;
10.2)在开启阶段,将磁电式振动速度传感器检测到的速度与速度反馈控制器中用户输入的设定速度值v1进行比较,若检测速度大于v1,则速度反馈控制器使电压输出控制器输出一段负电压作用到被控电磁阀上,以降低开启阶段阀芯运动速度;
11.3)在关闭阶段,将磁电式振动速度传感器检测到的速度与速度反馈控制器中用户输入的设定速度值v2进行比较,若检测速度大于v2,则速度反馈控制器使电压输出控制器输出一段正电压作用到被控电磁阀上,以降低开启阶段阀芯运动速度。
12.作为本发明的优选方案,所述的步骤1)中,磁电式振动速度传感器安装在被控电
磁阀的阀体上,且磁电式振动速度传感器与被控电磁阀安装在同一轴线上。
13.作为本发明的优选方案,所述的步骤2)中,负电压作用到被控电磁阀上的加载时刻t1为检测到速度大于v1的时刻,负电压结束加载的时刻t2为阀芯完全开启时刻,负电压的加载持续时间为t
2-t1。
14.作为本发明的优选方案,所述的步骤3)中,正电压作用到被控电磁阀上的加载时刻t3为检测到速度大于v2的时刻,正电压结束加载的时刻t4为阀芯完全关闭时刻,正电压的加载持续时间为t
4-t3。
15.作为本发明的优选方案,所述正电压的电压值为24v,负电压的电压值为-24v,负号表示负电压加载时,被控电磁阀的线圈内电流方向与正电压加载时相反。
16.作为本发明的优选方案,被控电磁阀的振动信号的频率大于磁电式振动速度传感器固有频率的五倍以上。
17.与现有技术相比,本发明通过磁电式振动速度传感器实时检测阀芯运动速度,并反馈给速度反馈控制器,能精准控制开启运动负电压加载时刻与终止时刻,关闭运动高电压加载时刻与终止时刻,实现了电磁开关阀启闭运动的减速,削弱了电磁开关阀启闭时刻的振动与噪音,延长了电磁开关阀的寿命,进一步提高电磁开关阀控液压系统的精度与可靠性。
附图说明
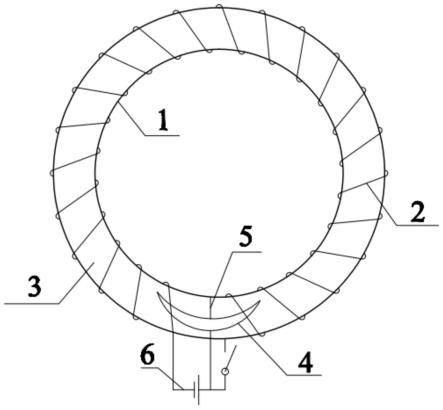
18.图1为磁电式振动速度传感器的力学模型示意图。
19.图2为幅频曲线。
20.图3为相频曲线。
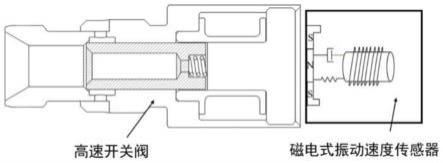
21.图4为电磁开关阀与传感器连接图;
22.图5为实施例示意的一种电磁阀柔性启闭控制装置的示意图;
23.图6为开启阶段减速效果图(v1=0.27m/s);
24.图7为开启阶段减速效果图(v1=0.28m/s)。
25.图8为关闭阶段减速效果图(v1=0.42m/s);
26.图9为关闭阶段减速效果图(v1=0.5m/s)。
具体实施方式
27.下面结合具体实施方式对本发明做进一步阐述和说明。所述实施例仅是本公开内容的示范且不圈定限制范围。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
28.本发明通过磁电式振动速度传感器实时检测阀芯运动速度,如图1所示为磁电式振动速度传感器的力学模型,其中,m为线圈质量,k为弹簧刚度,c为阻尼系数,设被测阀体的振动绝对位移为x1作为传感器的输入量,线圈的绝对位移为x0,线圈相对于壳体的相对位移为x
01
。因此有:
29.x
01
(t)=x0(t)-x1(t) (1)
30.线圈在整个运动中的力学表达式为:
[0031][0032]
如果考察线圈相对于壳体的相对位移,式(2)可改写为:
[0033][0034]
则输出量比输入量的传递函数为:
[0035][0036]
其中,固有频率阻尼比
[0037]
将s=jω带入,可以得到频率响应函数:
[0038][0039]
因此可得幅频特性和相频特性的表达式为:
[0040][0041][0042]
得出的幅频、相频曲线如图2、3所示,根据曲线可以发现当被测信号的频率远高于传感器固有频率时,可以用线圈相对于壳体的相对运动来代替壳体运动的绝对速度,即阀体运动的速度。又因为电磁开关阀在启闭运动过程中,阀芯与阀体间的作用力都为相互作用力,所以根据阀体的运动速度可以推算阀芯的运动速度,因此可以使用磁电式振动速度传感器实时采集电磁开关阀阀芯运动速度。
[0043]
如图4所示,本发明的将磁电式振动速度传感器与电磁开关阀相连,同时要求,磁电式振动速度传感器与电磁开关阀同轴线安装,图5中磁电式振动速度传感器安装在电磁开关阀的阀盖上。
[0044]
对于一个电磁开关阀而言,其一个完整周期的启闭全过程至少包括开启阶段、开启维持阶段、关闭阶段、关闭维持阶段。为了提高开启阶段的动态特性,在开启阶段之前还可以设置预加载阶段,在预加载阶段,先将线圈电流提升到一个预加载电流值,该值略低于阀芯开启电流;通过预加载电流值的设置,一旦进入开启阶段,线圈电流可快速达到开启电流,从而提高开启阶段的动态特性。同理,也可在关闭阶段前设置预关闭阶段来提前降低线圈电流值,提高关闭阶段动态特性。以上为电磁阀的现有技术,在此不在赘述。
[0045]
如图5所示,示意了一种电磁阀柔性启闭控制装置的示意图,该装置以7个不同的电压源来分别给电磁开关阀的各个阶段进行供电,通过高速切换开关来接入不同的电压源。7个电压源分别为:预加载电压源1,开启阶段电压源2,开启阶段如果需要减速时加载的负电压源3,开启维持电压源4,关闭阶段电压源5,关闭阶段如果需要时加载的高电压源6,关闭维持电压源7。
[0046]
其中,预加载电压源1作用在预加载阶段,以提高线圈电流至一个略低于开启电流的状态(一般为90%-95%开启电流值);开启阶段电压源2作用在开启阶段,用于开启电磁阀,负电压源3用于对开启阶段的阀芯进行减速;开启维持电压源4为开启维持阶段的电压源,用于保持电磁阀在开启阶段。关闭阶段电压源5用于触发电磁阀进入开闭阶段,并使电磁阀关闭;高电压源6用于对关闭阶段的阀芯进行减速;关闭维持电压源7用于使电磁阀保持关闭状态等待下一个启闭周期。各电压源输出电压值的选择可根据被控电磁阀的具体参数并根据实际情况进行选取。其中,所述开启阶段电压源2和高电压源6的电压值可以为24v,关闭阶段电压源5和负电压源3的电压值可以为-24v,负号表示负电压加载时,被控电磁阀的线圈内电流方向与正电压加载时相反。
[0047]
对应的,本发明的高速切换开关8包括8个触点用于使电磁开关阀接入上述7个电压源,其中第一触头8-1与预加载电压源相连,第二触头8-2与开启电压源相连,第三触头8-3与开启负电压源相连,第四触头8-4与开启维持电压源相连,第六触头8-6与关闭电压源相连,第七触头8-7与关闭高电压源相连,第八触头8-8与关闭维持电压源相连;第五触头8-5与电磁开关阀的线圈相连。
[0048]
速度反馈控制11获取速度检测值,根据比较结果控制电压输出控制器,电压输出控制器作用在高速切换开关8上,使其接入相应的电压源。上位机13可以调控电压输出控制器使高速开光阀有不同的工作状态,即上位机13输出电磁阀的启闭信号给电压输出控制器使其按正常的启闭周期进行工作。
[0049]
在开启阶段过程中,将磁电式振动速度传感器采集到的速度值与速度反馈控制器中用户输入的速度值v1进行对比,如果检测速度大于v1,速度反馈控制器立刻使电压输出控制器输出一段负电压,该负电压的加载时刻为t1,该负电压的结束加载时刻为t2,t1时刻即为检测开启速度大于v1时刻,t2时刻即为阀芯完全开启时刻。通过开启负电压的加载来减小电磁开关阀开启阶段电磁力,从而使阀芯运动减速,减小开启瞬间阀芯对阀座的撞击力;在关闭阶段过程中,将磁电式振动速度传感器采集到的速度值与速度反馈控制器中用户输入的速度值v2进行对比,如果检测速度大于v2,速度反馈控制器立刻使电压输出控制器输出一段正电压,该正电压的加载时刻为t3,该正电压的结束加载时刻为t4,t3时刻即为检测关闭速度大于v2时刻,t4时刻即为阀芯完全关闭时刻。通过关闭正电压的加载来增大电磁开关阀关闭阶段电磁力来抵消关闭时弹簧复位力,从而使阀芯运动减速,减小关闭瞬间阀芯对阀座的撞击力。
[0050]
在开启阶段,基于速度传感器实现电磁开关阀启闭减速方法的效果如图6、图7所示,在图6中v1=0.27m/s,通过基于速度传感器实现电磁开关阀启闭减速方法后,阀芯开启时刻撞击速度只为0.16m/s。在图7中v1=0.28m/s,通过基于速度传感器实现电磁开关阀启闭减速方法后,阀芯开启时刻撞击速度为0.22m/s,可以发现该方法减速效果较为明显。
[0051]
在关闭阶段,基于速度传感器实现电磁开关阀启闭减速方法的效果如图8、图9所
示,在图8中v2=0.42m/s,通过基于速度传感器实现电磁开关阀启闭减速方法后,阀芯开启时刻撞击速度为0.28m/s。在图9中v1=0.5m/s,通过基于速度传感器实现电磁开关阀启闭减速方法后,阀芯开启时刻撞击速度为0.39m/s,可以发现该方法减速效果在关闭过程中仍较为明显。
[0052]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。