1.本发明涉及机器人技术领域,特别是涉及一种靶向递药场控微机器人及其应用、制备装置、制备方法。
背景技术:
2.近年来,微纳米机器人受到了广泛的关注,软体的微纳米机器人通过电能、磁能、光能等形式的能量的驱动,在狭窄的复杂条件下可以实现可控的运动,软体微纳米机器人由于其体积小,运动灵活,无系绳等优势,在生物医学领域有着极为广泛的应用前景。
3.随着科学技术的发展,疾病诊断,药物递送等都有望实现应用微纳米机器人来进行精准医疗。精准医疗的概念一经推出,在医疗领域就备受青睐。微纳米机器人可以用作药物的载体,在人体内通过狭窄复杂的环境,自动将药物送到病灶部位治疗疾病,与传统方式的送药相比,靶向送药的方式大大减少了药物的服用注射量,加速了治疗进程,这种精准医疗被认为是最先进的治疗方案之一。
4.随着3d打印技术的日益发展,目前出现了很多3d打印出来的特殊结构的靶向送药微纳米机器人系统,有基于折纸的微机器人送药,还有微纳米球,微纳米螺旋管等。但是目前存在的这些微机器人送药系统,大多尺寸小,结构复杂,在制备方式上不仅耗时耗力,而且制作成本极高,增大了使用成本,不适于推广应用。
5.因此,如何改变现有技术中,送药机器人结构复杂、使用成本高的现状,成为了本领域技术人员亟待解决的问题。
技术实现要素:
6.本发明的目的是提供一种靶向递药场控微机器人及其应用、制备装置、制备方法,以解决上述现有技术存在的问题,简化送药机器人结构,降低送药机器人的使用成本。
7.为实现上述目的,本发明提供了如下方案:本发明提供一种靶向递药场控微机器人,包括:
8.药丝组件,所述药丝组件在患者体内与患者胃液接触后能够释放药物,所述药丝组件包括第一药物丝,所述第一药物丝的数量至少为一根;
9.载体丝,所述载体丝具有开口,所述载体丝套装于所述药丝组件的外部,所述第一药物丝与所述载体丝的开口不连通,所述载体丝具有磁性,磁控装置能够带动所述载体丝在患者体内移动并产生形变,所述载体丝的弹性模量较所述第一药物丝的弹性模量大,所述磁控装置能够控制所述载体丝在靶向位置断裂以使所述第一药物丝与患者胃液接触。
10.优选地,所述药丝组件还包括第二药物丝,所述第二药物丝与所述载体丝的开口相连通,所述第二药物丝的数量至少为一根。
11.优选地,所述第二药物丝包括药物段和非药物段,所述药物段和所述非药物段交替设置;
12.当所述第二药物丝的数量为多根时,所述第二药物丝的所述药物段交错设置。
13.优选地,所述载体丝由硅胶材质和钕铁硼磁性颗粒混合后制成。
14.本发明还提供一种上述的靶向递药场控微机器人的应用:
15.将所述载体丝送入患者体内,所述第一药物丝与所述载体丝的开口不连通,不与患者的胃液接触,所述磁控装置在患者体外带动所述载体丝运动,所述载体丝到达靶向位置时,所述磁控装置控制所述载体丝包裹所述第一药物丝的位置弯曲变形直至断裂,所述第一药物丝与患者胃液接触并释放药物。
16.与此同时,本发明还提供一种上的靶向递药场控微机器人的制备装置,包括:
17.微流控器件,所述微流控器件能够与打印平台相连;所述微流控器件内设置有打印通道和至少两条输入通道,所述输入通道包括安装通道和材料通道,所述材料通道的一端与所述安装通道相连通,所述材料通道的另一端与所述打印通道相连通,全部的所述材料通道与所述打印通道相连通的一端相互连通并形成汇聚通道,所述汇聚通道与所述打印通道相连通;
18.打印喷头,所述打印喷头与所述输入通道一一对应;所述打印喷头包括打印筒和打印针头,所述打印筒能够容纳打印材料,所述打印针头与所述打印筒相连通,所述打印筒内的打印材料能够经由所述打印针头挤出,用于打印所述载体丝和所述第一药物丝,所述打印针头可滑动地设置于所述安装通道内,且所述打印针头远离所述打印筒的一端能够伸入所述材料通道以及所述汇聚通道内。
19.优选地,所述打印针头与所述安装通道间隙配合;
20.所述打印针头与所述安装通道之间设置密封层,所述密封层由润滑油形成。
21.优选地,所述输入通道的数量大于两条时,其中一条所述输入通道与所述打印通道同轴设置,其余的所述输入通道绕所述打印通道的轴线周向均布。
22.优选地,所述材料通道的直径较所述安装通道的直径大。
23.除此之外,本发明还提供一种靶向递药场控微机器人的制备方法,利用上述的靶向递药场控微机器人的制备装置,将所述微流控器件与所述打印平台连接,在所述打印筒内加入打印材料,所述打印平台带动所述微流控器件和所述打印喷头运动,打印材料由所述打印针头挤出,经由所述打印通道挤出进行打印,得到靶向递药场控微机器人;
24.改变下列因素的一种或几种,以改变制备的所述靶向递药场控微机器人:
25.所述打印喷头以及所述输入通道的数量、所述打印筒内打印材料的类型、所述打印喷头的流量、所述打印喷头的流速,所述打印针头与所述安装通道的相对位置。
26.本发明相对于现有技术取得了以下技术效果:本发明的靶向递药场控微机器人,包括药丝组件和载体丝。本发明还提供一种靶向递药场控微机器人的应用,将载体丝送入患者体内,第一药物丝与载体丝的开口不连通,不与患者的胃液接触,磁控装置在患者体外带动载体丝运动,载体丝到达靶向位置时,磁控装置控制载体丝包裹第一药物丝的位置弯曲变形直至断裂,第一药物丝与患者胃液接触并释放药物。本发明的靶向递药场控微机器人,结构简单,使用方便。
27.与此同时,本发明还提供一种靶向递药场控微机器人的制备装置,包括微流控器件和打印喷头,工作时,微流控器件能够安装于打印平台上,打印平台能够带动微流控器件和打印喷头运动,向打印筒内加入打印材料,打印材料由打印针头挤出,经由材料通道进入汇聚通道,同时与其他材料通道进入的打印材料一起由打印通道挤出,完成药丝组件和载
体丝的打印,降低靶向递药场控微机器人的制备难度,降低生产成本和微机器人使用成本。需要强调的是,通过改变打印筒内打印材料的类型,结合打印喷头的流量和流速的调整,以及打印针头与安装通道相对位置的改变,能够实现制备的靶向递药场控微机器人的变化,提高靶向递药场控微机器人的灵活性。
28.除此之外,本发明还提供一种靶向递药场控微机器人的制备方法,利用上述的靶向递药场控微机器人的制备装置,本发明中包含至少两条输入通道,输入通道与打印喷头一一对应,每一条输入通道均与打印通道相连通,且打印针头滑动设置于安装通道内,因此,打印材料、打印喷头的流速和流量、打印针头与安装通道的相对位置均属于可变因素,通过改变这些可变因素的一种或几种,就可以改变药丝组件和载体丝的结构以及相对位置关系,提高靶向递药场控微机器人的灵活适应性。
附图说明
29.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
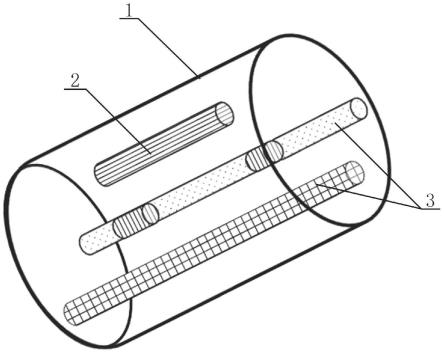
30.图1为本发明的靶向递药场控微机器人的结构示意图;
31.图2为图1中的靶向递药场控微机器人的径向截面的结构示意图;
32.图3为本发明的靶向递药场控微机器人在肠胃中释药的示意图;
33.图4为本发明的靶向递药场控微机器人的释药流程图;
34.图5为本发明其他实施例中靶向递药场控微机器人的结构示意图;
35.图6为图2中靶向递药场控微机器人的径向截面的结构示意图;
36.图7为本发明其他实施例中靶向递药场控微机器人的径向截面的结构示意图;
37.图8为本发明的靶向递药场控微机器人的制备装置的结构示意图;
38.图9为本发明的靶向递药场控微机器人的制备装置的工作示意图;
39.图10为本发明的靶向递药场控微机器人的制备装置的微流控器件的俯视示意图。
40.其中,1为载体丝,2为第一药物丝,3为第二药物丝,4为微流控器件,5为打印喷头,6为打印通道,7为输入通道,8为安装通道,9为材料通道,10为汇聚通道,11为打印筒,12为打印针头。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
42.本发明的目的是提供一种靶向递药场控微机器人及其应用、制备装置、制备方法,以解决上述现有技术存在的问题,简化送药机器人结构,降低送药机器人的使用成本。
43.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
44.本发明提供一种靶向递药场控微机器人,包括药丝组件和载体丝1,请参考图1,其中,药丝组件在患者体内与患者胃液接触后能够释放药物,药丝组件包括第一药物丝2,第一药物丝2的数量至少为一根;载体丝1具有开口,载体丝1套装于药丝组件的外部,第一药物丝2与载体丝1的开口不连通,载体丝1具有磁性,磁控装置能够带动载体丝1在患者体内移动并产生形变,载体丝1的弹性模量较第一药物丝2的弹性模量大,磁控装置能够控制载体丝1在靶向位置断裂以使第一药物丝2与患者胃液接触。将载体丝1送入患者体内,第一药物丝2与载体丝1的开口不连通,不与患者的胃液接触,磁控装置在患者体外带动载体丝1运动,载体丝1到达靶向位置时,磁控装置控制载体丝1包裹第一药物丝2的位置弯曲变形直至断裂,第一药物丝2与患者胃液接触并释放药物。本发明的靶向递药场控微机器人,结构简单,使用方便。
45.此处需要解释说明的是,本发明的靶向递药场控微机器人,为了降低机器人对患者造成伤害,载体丝1为空心圆柱状,载体丝1的直径和长度根据具体的靶向位置确定,在人体血管中,载体丝1的尺寸可以减小到微纳米级别,由于载体丝1具有磁性,可以通过磁控装置控制载体丝1的变形和定向移动,精确到达人体的各个病灶位置。另外,本发明以药丝组件与人体的胃液接触后释药为例,在实际应用中,药丝组件还可以根据靶向位置的不同以及药丝组件的具体材质确定释药条件,例如,药丝组件在与人体的血液接触后进行释药,药丝组件的释药条件为本领域技术人员的惯用手段,此处不再赘述。
46.为了进一步满足患者用药需求,药丝组件还包括第二药物丝3,第二药物丝3与载体丝1的开口相连通,第二药物丝3的数量至少为一根,在机器人进入患者体内后,由于第二药物丝3与载体丝1的开口相连通,第二药物丝3与患者胃液接触,随时间缓慢地、持续地释放药物,非恒速的释放能够显著增加患者的顺应性。此处需要说明的是,第二药物丝3与载体丝1的开口相连通,实际应用中可以使第二药物丝3的径向截面与载体丝1的径向截面相重合,以实现第二药物丝3与载体丝1的开口相连通,从而第二药物丝3能够与患者胃液接触,第二药物丝3的另一端封装或载体丝1的另一端封装,保证第二药物丝3能够实现缓控制释药。
47.第二药物丝3可以实现持续缓慢地释放药物,实际应用中,为了实现定时释药的目的,还可以通过改变第二药物丝3的结构,使第二药物丝3包括药物段和非药物段,药物段和非药物段交替设置,在药物段完成一次释药后,非药物段与患者胃液接触但不释放药物,可使非药物段释放人体无害的物质,以保证第二药物丝3的正常消耗,在非药物段释放结束后,下一段药物段继续进行药物释放,实现了在预定的不同时间释放药物的目的,一次服药即可完成多次药物释放,有利于减轻患者服药负担,提升用户体验。
48.还需要说明的是,当需要进行多种药物分别定时释放时,第二药物丝3的数量可以设置为多根,需要在不同时段释放药物的第二药物丝3的药物段交错设置。
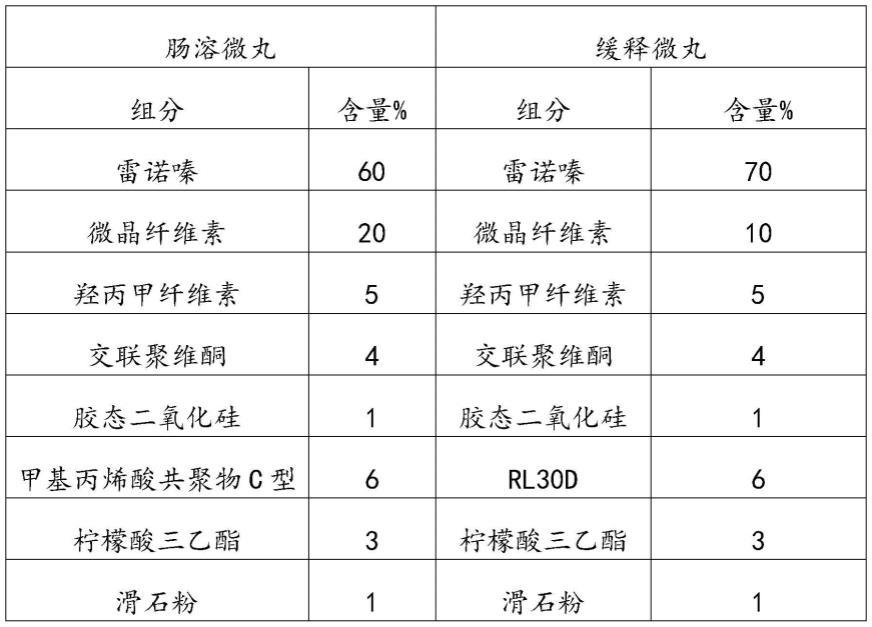
49.具体地,载体丝1由硅胶材质和钕铁硼磁性颗粒混合后制成,在本具体实施方式中,利用对人体无害的硅胶制作载体丝1,首先由10g的道康宁1700硅胶,1g道康宁1700固化剂以及7g的硅油混合,在2000rpm转速下充分混合10min,再加入10g的钕铁硼磁性颗粒均匀混合并最终在80摄氏度下固化3小时而成,钕铁硼磁性颗粒在固化中对磁性粒子定向排布,患者体外的磁控装置通过钕铁硼磁性颗粒带动载体丝1运动以及产生形变。另外,药丝组件可采用淀粉基药物制成,根据用药需求加入不同的药物粉末,药物粉末占比约为1%-2%,
并与大约46%重量的崩解剂交联聚乙烯基吡咯烷酮和碳酸氢钠,约35%重量的填充剂乳糖和淀粉,约18%重量的粘合剂淀粉浆等混合在一起形成可以挤出打印的粘稠度,与上述载体丝1同时打印并固化,根据药物量不同,各个组分的占比也略有不同。
50.进一步地,本发明还提供一种上述的靶向递药场控微机器人的应用,将载体丝1送入患者体内,第一药物丝2与载体丝1的开口不连通,不与患者的胃液接触,磁控装置在患者体外带动载体丝1运动,载体丝1到达靶向位置时,磁控装置控制载体丝1包裹第一药物丝2的位置弯曲变形直至断裂,第一药物丝2与患者胃液接触并释放药物,以实现微机器人定点释放药物,利用磁控装置在患者体外控制微机器人运动和产生变形,结构简单操作便捷,便于推广应用。此处需要解释说明的是,第一药物丝2与载体丝1的开口不连通,当载体丝1内只包含第一药物丝2时,可封堵载体丝1的开口,避免第一药物丝2与患者胃液直接接触,当载体丝1内同时包含第一药物丝2和第二药物丝3时,可利用第二药物丝3与载体丝1的开口相连通的同时,封堵载体丝1的开口,避免第一药物丝2与载体丝1的开口相连通。
51.与此同时,本发明还提供一种上的靶向递药场控微机器人的制备装置,包括微流控器件4和打印喷头5,请参考图8,其中,微流控器件4能够与打印平台相连;微流控器件4内设置有打印通道6和至少两条输入通道7,输入通道7包括安装通道8和材料通道9,材料通道9的一端与安装通道8相连通,材料通道9的另一端与打印通道6相连通,全部的材料通道9与打印通道6相连通的一端相互连通并形成汇聚通道10,汇聚通道10与打印通道6相连通;打印喷头5与输入通道7一一对应;打印喷头5包括打印筒11和打印针头12,打印筒11能够容纳打印材料,打印针头12与打印筒11相连通,打印筒11内的打印材料能够经由打印针头12挤出,用于打印载体丝1和第一药物丝2,打印针头12可滑动地设置于安装通道8内,且打印针头12远离打印筒11的一端能够伸入材料通道9以及汇聚通道10内。
52.本发明的靶向递药场控微机器人的制备装置工作时,微流控器件4能够安装于打印平台上,打印平台能够带动微流控器件4和打印喷头5运动,向打印筒11内加入打印材料,打印材料由打印针头12挤出,经由材料通道9进入汇聚通道10,同时与其他材料通道9进入的打印材料一起由打印通道6挤出,完成药丝组件和载体丝1的打印,降低靶向递药场控微机器人的制备难度,降低生产成本和微机器人使用成本。需要强调的是,通过改变打印筒11内打印材料的类型,结合打印喷头5的流量和流速的调整,以及打印针头12与安装通道8相对位置的改变,能够实现制备的靶向递药场控微机器人的变化,提高靶向递药场控微机器人的灵活性。
53.其中,打印针头12与安装通道8间隙配合,确保打印针头12能够沿安装通道8往复滑动,同时减小打印针头12与安装通道8之间的缝隙,避免打印材料的泄漏。同时,打印针头12与安装通道8之间设置密封层,密封层由润滑油形成,在避免打印材料泄漏的基础上,进一步提高了打印针头12的往复运动可靠性。
54.当输入通道7的数量大于两条时,其中一条输入通道7与打印通道6同轴设置,用于打印载体丝1,其余的输入通道7绕打印通道6的轴线周向均布,用于打印药丝组件,此处需要解释说明的是,其余的输入通道7绕打印通道6的轴线周向均布,具体指,除与打印通道6同轴的输入通道7之外,其余的输入通道7的轴线与打印通道6的轴线之间夹角均相同。
55.还需要说明的是,材料通道9的直径较安装通道8的直径大,确保打印材料的顺利挤出,避免出现打印材料断续的情况,另外,在由多条材料通道9相连通形成的汇聚通道10
部分,方便打印针头12伸入汇聚通道10内,从而更改打印的药丝组件与载体丝1之间的位置关系,提高微机器人的灵活适应性。
56.除此之外,本发明还提供一种靶向递药场控微机器人的制备方法,利用上述的靶向递药场控微机器人的制备装置,将微流控器件4与打印平台连接,在打印筒11内加入打印材料,打印平台带动微流控器件4和打印喷头5运动,打印材料由打印针头12挤出,经由打印通道6挤出进行打印,得到靶向递药场控微机器人;
57.改变下列因素的一种或几种,以改变制备的靶向递药场控微机器人:
58.打印喷头5以及输入通道7的数量、打印筒11内打印材料的类型、打印喷头5的流量、打印喷头5的流速,打印针头12与安装通道8的相对位置。
59.本发明还的靶向递药场控微机器人的制备方法,通过改变上述可变因素的一种或几种,改变药丝组件和载体丝1的结构以及相对位置关系,例如,打印出直径和长短不一的各种第一药物丝2和第二药物丝3等,提高靶向递药场控微机器人的灵活适应性。
60.下面通过具体的实施例,对本发明的靶向递药场控微机器人,进行进一步的解释说明。
61.实施例一
62.本实施例的靶向递药场控微机器人,药丝组件包括一根第一药物丝2和两根第二药物丝3,第一药物丝2为外驱动释放,其中一根第二药物丝3不区分药物段和非药物段,为缓控制释放,另外一根第二药物丝3包括药物段和非药物段,且药物段和非药物段交替设置,为定时释放,三根药物丝的连线呈等边三角形,载体丝1套装在药丝组件的外部,载体丝1包裹着药丝组件进入人体实施靶向送药,以向患者肠胃送药为例。
63.请参考图3和图4,微机器人通过口服的方式进入患者肠胃,磁控装置控制微机器人在肠胃中移动至靶向位置,进行释药,在不同位置根据病灶部位的不同,可以设计选用不同的释放方式。在本实施例中,不区分药物段和非药物段的第二药物丝3,在进入人体胃液之后,在酸性条件下缓慢地、持续地释放药物,缓控制释药一段时间后,磁控装置控制微机器人移动到肠道中,在到达靶向位置时,磁控装置控制微机器人产生形变并开裂,第一药物丝2释药,之后微机器人在肠道中移动,在到达靶向位置时,区分药物段和非药物段的第二药物丝3,根据药物释放速率,在药物段添加特定药物,在非药物段释放于人体后,再进行药物段的释放,实现定时释放的目的。释药完成后,载体丝1经大肠排出患者体外。
64.还需要强调的是,本发明的靶向递药场控微机器人的制备装置,利用微流控器件4和打印针头12完成载体丝1和药丝组件的打印,且通过调整打印针头12与安装通道8的相对位置以及打印喷头5等可变因素,能够改变制备的微机器人的结构,在简化微机器人结构,节约生产成本和微机器人使用成本的前提下,极大地提高了微机器人的灵活适应性。
65.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。