1.本发明涉及肢体康复器械技术领域,具体涉及一种肢体康复用非主动模块装置。
背景技术:
2.肢体康复治疗仪是用于肢体运动功能恢复的医疗器械,主要用于治疗脑血栓、脑梗塞、脑溢血、以及外伤等引起的肢体运动功能障碍的康复治疗;小儿脑瘫;截瘫及创伤后神经损伤引起的肌肉萎缩等。
3.肢体运动模拟疗法以促通技术为核心,使肌肉群受到低脉冲电刺激后按一定顺序模拟正常运动,除直接锻肌力外,通过模拟运动的被动拮抗作用,协调和支配肢体的功能状态,使其恢复动态平衡;同时多次重复的运动可以向大脑反馈促通信息,使其尽快地最大限度地实现功能重建,打破痉挛模式,恢复自主的运动。
4.康复的模块主要有三类:主动模块、补偿模块以及被动模块。主动模块为康复训练过程全程通过自身训练,补偿模块为自身康复训练为主,由电机控制作辅助性的康复训练。目前的康复训练模式大多通过程序控制,而程序无法实现差异化的诊疗手段。另外,程序出问题条件下修复难度大,成本高,难以普及推广使用。
技术实现要素:
5.本发明的目的就是为了克服上述现有技术存在的缺陷中的至少一个而提供一种驱动力大小可控、可将补偿模式与被动模式被整合起来的肢体康复用非主动模块装置。
6.本发明的目的可以通过以下技术方案来实现:
7.一种肢体康复用非主动模块装置,该装置包括用于产生洛伦兹力的电磁环;
8.该电磁环内填充有导电液体介质,并设有悬浮在导电液体介质内的浮标;
9.该浮标一端与电磁环内壁弹性连接,另一端与待康复肢体部位活动连接;
10.所述浮标将电磁环内的流体分为内外两部分,靠近电磁环外部的流体流动截面积小于靠近电磁环内部的流体流动截面积。
11.进一步地,所述的电磁环包括闭环空心外壳以及用于产生电磁场的供电机构,该供电机构包括闭环连接的电源和导线,所述的导线包括缠绕在闭环空心外壳上的导线线圈以及位于闭环空心外壳外部的环外导线。
12.进一步地,所述的供电机构还包括设置在环外导线上的压力感应开关,该压力感应开关的感应器置于待康复肢体部位。
13.当被康复部位主动用力时,感应器受到压力感应会断开压力感应开关,当被康复部位不用力时,感应器没有受到压力从而开启压力感应开关。
14.进一步地,所述的浮标与待康复肢体部位之间还设有转换控制机构,该转换控制机构包括相互螺纹匹配的内螺杆和外螺杆,所述的内螺杆与浮标刚性连接,外螺杆上缠绕有刚性绳索,该刚性绳索与待康复肢体部位相连。
15.随着浮标向环外移动,推动内螺杆向外移动,进而促使外螺杆转动,进而牵引刚性
绳索,并带动待康复肢体部位。螺纹螺杆传动能够将移动距离放大,从而实现浮标小距离移动控制被康复部位大距离移动。具体而言,浮标运动一个螺距的距离时,被康复部位移动外螺杆周长的距离,从而通过浮标的短距离移动控制被康复部位实现一定角度的移动。
16.进一步地,所述的环外导线上还设有可开闭的导线线段,所述的内螺杆内穿设有可切断导线线段的绝缘杆。
17.当内螺杆向外移动到一定程度时,带动绝缘杆继续外伸,直至切断导线线段,形成断路;此时内螺杆失去向外移动的动力,在弹性作用下恢复原始位置,又使得恢复通路,如此往复。
18.进一步地,所述的转换控制机构与待康复肢体部位之间还设有匀速转换机构,该匀速转换机构包括套筒和位于套筒内的弹簧、挂钩和滑块;
19.所述的滑块与套筒滑动连接,所述的弹簧通过挂钩连接于滑块两侧,靠近转换控制机构的弹簧与刚性绳索相连,远离转换控制机构的弹簧通过绳索与待康复肢体部位相连。
20.由于浮标在运动过程中浮标两侧截面的面积差异增加,因此压力差也在不断变化,而针对被康复部位进行诊疗过程中,需要将不断变化的运动速度转化为匀速控制,因此将匀速转换机构与被康复部位通过两个隔离的弹簧连接,能够达到缓冲速度急剧变化的目的,从而有效的对被康复部位进行诊疗。
21.进一步地,所述的浮标通过高弹筋与闭环空心外壳内部连接。所述的浮标位于闭环空心外壳的圆形截面偏心位置,且可以线性移动。
22.进一步地,所述的供电机构上还设有负载。电源为蓄电池,由于洛伦兹力与电流有关,因此设置合理负载r,使之在蓄电池下具有合适电流。
23.进一步地,所述的导电液体介质为汞。
24.进一步地,所述的浮标为月牙形,月牙形的开口一侧面向闭环空心外壳的中心处。
25.进一步地,所述的闭环空心外壳上开设有用于连接转换控制机构的小孔,且小孔能够避免介质溢出。刚性绳索为钢丝,绳索为尼龙绳。
26.与现有技术相比,本发明具有以下优点:
27.(1)本发明可以控制不同档位负载,从而调节电流,进而控制连杆的驱动力大小,适用性更广;
28.(2)本发明的控制系统既可以利用通电后的汞推动,也可以通过被康复部位推动;
29.(3)本发明中,在被康复部位设置压力传感器,从而将补偿模式与被动模式被整合起来,无需通过程序控制来切换。
附图说明
30.图1为实施例中的装置总图;
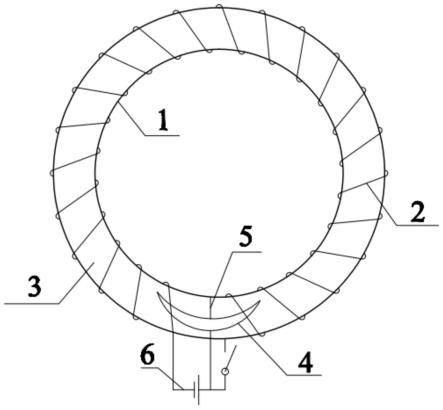
31.图2为实施例中电磁环示意图;
32.图3为实施例中浮标示意图;
33.图4为实施例中电磁控制原理图;
34.图5为实施例中与被康复部位连接示意图;
35.图6为实施例中的装置标注图;
36.图中标号所示:闭环空心外壳1、导线线圈2、导电液体介质3、浮标4、高弹筋5、供电机构6、环外导线61、电源62、压力感应开关63、转换控制机构7、内螺杆71、外螺杆72、刚性绳索73、导线线段74、绝缘杆75、匀速转换机构8、弹簧81、挂钩82、滑块83、绳索84。
具体实施方式
37.下面结合附图和具体实施例对本发明进行详细说明。本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
38.实施例
39.一种肢体康复用非主动模块装置,如图1-5,该装置包括用于产生洛伦兹力的电磁环;该电磁环内填充有导电液体介质3,并设有悬浮在导电液体介质3内的浮标4;该浮标4一端与电磁环内壁弹性连接,另一端与待康复肢体部位活动连接;浮标4靠近电磁环外部的流体流动截面积小于靠近电磁环内部的流体流动截面积。
40.电磁环包括闭环空心外壳1以及用于产生电磁场的供电机构6,该供电机构6包括闭环连接的电源62和导线,导线包括缠绕在闭环空心外壳1上的导线线圈2以及位于闭环空心外壳1外部的环外导线61。供电机构6还包括设置在环外导线61上的压力感应开关63,该压力感应开关63的感应器置于待康复肢体部位。当被康复部位主动用力时,感应器受到压力感应会断开压力感应开关63,当被康复部位不用力时,感应器没有受到压力从而开启压力感应开关63。
41.浮标4与待康复肢体部位之间还设有转换控制机构7,该转换控制机构7包括相互螺纹匹配的内螺杆71和外螺杆72,内螺杆71与浮标4刚性连接,外螺杆72上缠绕有刚性绳索73,该刚性绳索73与待康复肢体部位相连。随着浮标4向环外移动,推动内螺杆71向外移动,进而促使外螺杆72转动,进而牵引刚性绳索73,并带动待康复肢体部位。螺纹螺杆传动能够将移动距离放大,从而实现浮标小距离移动控制被康复部位大距离移动。具体而言,浮标运动一个螺距的距离时,被康复部位移动外螺杆周长的距离,从而通过浮标的短距离移动控制被康复部位实现一定角度的移动。环外导线61上还设有可开闭的导线线段74,内螺杆71内穿设有可切断导线线段74的绝缘杆75。当内螺杆71向外移动到一定程度时,带动绝缘杆75继续外伸,直至切断导线线段74,形成断路;此时内螺杆71失去向外移动的动力,使得恢复通路,如此往复。
42.转换控制机构7与待康复肢体部位之间还设有匀速转换机构8,该匀速转换机构8包括套筒和位于套筒内的弹簧81、挂钩82和滑块83;滑块83与套筒滑动连接,弹簧81通过挂钩82连接于滑块83两侧,靠近转换控制机构7的弹簧81与刚性绳索73相连,远离转换控制机构7的弹簧81通过绳索84与待康复肢体部位相连。由于浮标4在运动过程中前后壁面的面积差异增加,因此压力差也在不断变化,而针对被康复部位进行诊疗过程中,需要将不断变化的运动速度转化为匀速控制,因此将匀速转换机构8与被康复部位通过两个隔离的弹簧81连接,能够达到缓冲速度急剧变化的目的,从而有效的对被康复部位进行诊疗。
43.浮标4通过高弹筋5与闭环空心外壳1内部连接。高弹筋5为劲度系数较小的筋,浮标4位于闭环空心外壳1的圆形截面偏心位置,且可以线性移动。供电机构6上还设有负载。电源62为蓄电池,由于洛伦兹力与电流有关,因此设置合理负载r,使之在蓄电池下具有合
适电流。导电液体介质3为汞。浮标4为月牙形,月牙形的开口一侧面向闭环空心外壳1的中心处。闭环空心外壳1上开设有用于连接转换控制机构7的小孔,且小孔能够避免介质溢出。刚性绳索73为钢丝,绳索84为尼龙绳。
44.工作原理:如图1所示,在导线线圈2通电之后,导线线圈2会在闭环空心外壳1内部产生电磁感应出的磁场,并驱动导电液体介质3恒向流动。如图3所示,导电液体介质3流经浮标4,在浮标4两侧由于截面积差异,会产生流速差进而产生压力差,通过浮标4受到的压力差位置变化来驱动转换控制机构7,进而驱动匀速转换机构8运动,从而带动被康复部位运动。
45.为了更便于理解本方案,本发明提供一下具体算例作为参考,其中,f/kgf列举的数据仅为发明人假设,具体如下,如图6:
46.电磁感应强度b为:
47.b=μni
48.μ为磁导率,汞的磁导率为1,n为线圈匝数,i为电流;
49.f=μni2l
50.如上图所示,截面半径为r,在这个电场力驱动下,汞的稳定流速为(r》》r):
51.f=mv2/r=(ρ*πr2*2πr)*v2/r=2π2r2ρv252.由于流动过程中,汞的电磁感应力提供向心力,因此:
53.μni22πr=2π2r2ρv254.v=i/sqrt(ρπr/μn)
55.假设月牙内外流体流动截面积满足4倍关系,根据连续性方程:
56.vs=v1s1=v2s257.由于s1=1/5,s=1/2,s2=4/5,v=i/sqrt(ρπr/μn)
58.因此:
59.v1=2.5i/sqrt(ρπr/μn),v2=0.625i/sqrt(ρπr/μn)
60.p=0.5ρ(v
12-v
22
)=(2.5
2-0.6252)μni2/(2πr)
61.假设推杆面占截面面积的比为α,s
p
=απr262.推杆的力为f=(2.5
2-0.6252)μni2/(2πr)*απr2=2.93μni2αr
63.如前所述,μ=1,n=100,f=293i2αr
64.假设前述r=0.15m,在环绕100匝的条件下得出每匝线圈宽度不大于10mm,按照r》》r的标准,r=0.02m,α=1,估算此时汞的重量为16kg左右,而由于r=0.02m,因此浮标可移动距离为0.02m,被康复部位如需实现0.2m的移动距离,即围绕脚跟部30
°
旋转,则螺纹螺杆传动比为1:10.结果汇总如下表1:
65.表1不同症状患者康复情况结果
[0066] 浮标受力f/kgf电流i/a被康复部位受力f/kgf轻症36.62.53.66中症52.83.05.28重症93.84.09.38
[0067]
综上可知,本发明可以控制不同档位负载,从而调节电流,进而控制连杆的驱动力大小,适用性更广;控制系统既可以利用通电后的汞推动,也可以通过被康复部位推动;在
被康复部位设置压力传感器,从而将补偿模式与被动模式被整合起来,无需通过程序控制来切换。
[0068]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。