1.本实用新型涉及一种自动控制组件,尤其涉及一种能够利用总线为节点装置提供反馈信号的自动控制组件。本实用新型还涉及一种具有上述自动控制组件的自动控制装置。
背景技术:
2.自动控制组件包括多个节点装置,在一些应用场景下,节点装置需要额外接入传感器获取反馈信号以提高控制精度或监测功能。由于传感器的类型繁多并且采用不同的总线协议类型,因此节点装置需要支持尽可能多的总线协议类型,或是根据实际需求定制所需要的总线协议类型,造成节点装置的制造成本较高。
技术实现要素:
3.本实用新型的目的是提供一种自动控制组件,能够以低成本接入传感器,为节点装置提供第一反馈信号。
4.本实用新型的另一目的是提供一种自动控制装置,能够以低成本接入传感器,为节点装置提供第一反馈信号。
5.本实用新型提供了一种自动控制组件,包括一个总线、一个第一类传感器以及一个节点装置。第一类传感器接入总线。节点装置接入总线,节点装置能够通过总线接收第一类传感器生成的反馈信号。
6.本实用新型提供的自动控制组件,将第一类传感器接入总线,并通过总线向节点装置传输反馈信号。相比传感器直接接入节点装置的方式,在本发明提供的自动控制组件中,节点装置在当前连接的总线协议之外不再需要设置额外的总线协议类型,降低了制造和使用的成本。
7.在自动控制组件的另一种示意性实施方式中,自动控制组件包括数个节点装置,其中至少一个节点装置包括一个受控设备和一个控制设备。受控设备能够驱动一个受控部件产生动作。控制设备接入总线并连接受控设备,控制设备能够通过总线接收第一类传感器生成的反馈信号并驱动受控设备。借此实现控制设备对受控设备的闭环控制。
8.在自动控制组件的再一种示意性实施方式中,至少一个节点装置还包括一个第二类传感器,控制设备还直接连接第二类传感器并接收第二类传感器生成的反馈信号,控制设备根据第一类传感器和第二类传感器生成的反馈信号驱动受控设备。借此使具备单闭环控制的控制设备实现双闭环控制。
9.在自动控制组件的还一种示意性实施方式中,受控设备为电机,控制设备为电机驱动器,第一类传感器为位置传感器,第二类传感器为速度传感器。
10.在自动控制组件的还一种示意性实施方式中,第二类传感器通过同步串行接口连接控制设备。
11.在自动控制组件的还一种示意性实施方式中,数个节点装置中的一个节点装置为
能够控制控制设备的主控设备。
12.在自动控制组件的还一种示意性实施方式中,主控设备为上位机或服务器。
13.在自动控制组件的还一种示意性实施方式中,总线为控制器局域网络装置。
14.本实用新型提供了一种自动控制装置,包括一个受控部件和一个上述的自动控制组件,受控设备能够驱动受控部件产生动作。
附图说明
15.以下附图仅对本实用新型做示意性说明和解释,并不限定本实用新型的范围。
16.图1为自动控制组件的一种示意性实施方式的结构示意图。
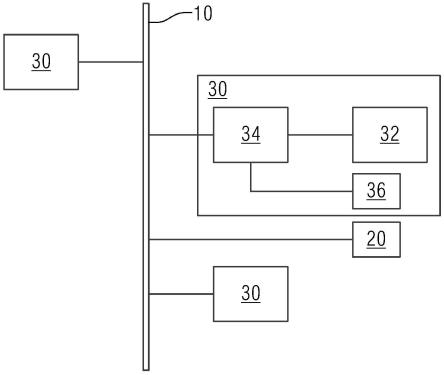
17.图2为自动控制组件的另一种示意性实施方式的结构示意图。
18.标号说明
19.10总线
20.20第一类传感器
21.30节点装置
22.32受控设备
23.34控制设备
24.36第二类传感器
具体实施方式
25.为了对实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图说明本实用新型的具体实施方式,在各图中相同的标号表示结构相同或结构相似但功能相同的部件。
26.在本文中,“示意性”表示“充当实例、例子或说明”,不应将在本文中被描述为“示意性”的任何图示、实施方式解释为一种更优选的或更具优点的技术方案。
27.在本文中,“第一”、“第二”等并非表示其重要程度或顺序等,仅用于表示彼此的区别,以利文件的描述。
28.为使图面简洁,各图中只示意性地表示出了与本实用新型相关的部分,它们并不代表其作为产品的实际结构。
29.图1为自动控制组件的一种示意性实施方式的结构示意图。参照图1,自动控制组件包括一个总线10、一个第一类传感器20以及数个节点装置30。
30.总线10为控制器局域网络装置。第一类传感器20接入总线10,并且第一类传感器20用于实时感测一个受控部件的动作并生成反馈信号。受控部件例如是机械臂或小车等部件等,第一类传感器20生成的反馈信号可以是位置反馈信号或速度反馈信号等。节点装置30接入总线10,节点装置30例如是控制设备或监测设备,其能够通过总线10接收第一类传感器20生成的反馈信号,并借此实现受控部件的运动控制或运动监测。
31.虽然示意性实施方式中包括三个节点装置30,然而并不限于此,在其他示意性实施方式中,节点装置30的数量可以根据实际需求设置,当然也可以仅包括一个节点装置30。
32.本实用新型提供的自动控制组件,将第一类传感器20接入总线10,并通过总线10向节点装置30传输反馈信号。相比传感器直接接入节点装置30的方式,在本发明提供的自
动控制组件中,节点装置30在当前连接的总线协议之外不再需要设置额外的总线协议类型,降低了制造和使用的成本。
33.图2为自动控制组件的另一种示意性实施方式的结构示意图。参照图2,数个节点装置30中的一个节点装置30为直接控制受控部件运动的设备,其包括一个受控设备32和一个控制设备34。受控设备32为电机,其能够在一个驱动信号驱动下做出对应的动作,并用于通过一个传动部件驱动受控部件产生动作。控制设备34为电机驱动器,其接入总线10并连接受控设备32。控制设备34能够通过总线网络10接收一个控制信号和第一类传感器20生成的反馈信号,并根据控制信号和第一类传感器20生成的反馈信号生成用于驱动受控设备32的驱动信号。借此实现控制设备34对受控设备32的闭环控制。
34.电机驱动器通常配套设置于有速度传感器以实现闭环控制,因此在示意性实施方式中,参照图2,节点装置30还包括一个第二类传感器36,其为速度传感器。控制设备34还通过同步串行接口直接连接第二类传感器36并接收第二类传感器36生成的速度反馈信号。在示意性实施方式中,第一类传感器20为位置传感器。控制设备34根据第一类传感器20和第二类传感器36生成的位置反馈信号和速度反馈信号驱动受控设备32。借此使具备速度单闭环控制的控制设备34实现位置速度双闭环控制。
35.在示意性实施方式中,参照图2,数个节点装置30中的另一个节点装置30为能够控制控制设备34的主控设备,主控设备例如是上位机或服务器,其能够通过总线10向控制设备34发送控制信号。同时,主控设备还能够接收第一类传感器20生成的反馈信号并用于分析和记录。
36.本实用新型提供了一种自动控制装置,包括一个受控部件和一个上述的自动控制组件,受控设备32能够驱动受控部件产生动作。
37.应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
38.上文所列出的一系列的详细说明仅仅是针对本实用新型的可行性实施例的具体说明,它们并非用以限制本实用新型的保护范围,凡未脱离本实用新型技艺精神所作的等效实施方案或变更,如特征的组合、分割或重复,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。