1.本发明涉及数控加工技术领域,尤其涉及一种用于柔性磨具的路径规划方法。
背景技术:
2.叶片是航空发动机的重要零部件,其表面完整性和轮廓精度会直接影响航空发动机的性能。表面质量差的叶片在高温、高压、高速的环境下容易发生疲劳失效、变形或断裂,导致航空发动机性能降低,使用寿命短,甚至发生损坏。目前,国内外对航空发动机叶片多采用多轴数控铣削的加工方法,但在叶片表面会留下明显的铣削残留刀纹。因此,有必要采用磨削技术去除残留的铣刀痕迹,从而提高叶片的表面质量。精铣完后的叶片余量很小,刚性磨具并不适用,而百页轮材料去除率小,接触面积大,成本低,完全符合加工要求。然而,采用现有技术中的cam(computer aided manufacturing,计算机辅助制造)软件算法都是针对刚性刀具的,针对百叶轮等柔性磨具缺乏相应的磨削轨迹生成控制方法。
3.因此,如何提供一种适用于柔性磨具的路径规划控制方法成为本领域技术人员亟待解决的技术问题。
技术实现要素:
4.本发明提供了一种用于柔性磨具的路径规划方法,解决相关技术中存在的缺乏柔性磨具的路径规划方法的问题。
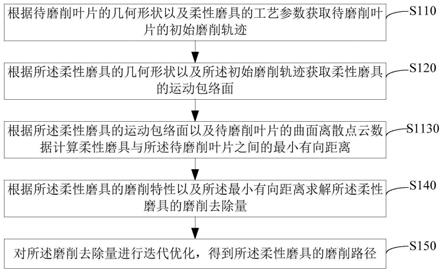
5.作为本发明的一个方面,提供一种用于柔性磨具的路径规划方法,其中,包括:
6.根据待磨削叶片的几何形状以及柔性磨具的工艺参数获取待磨削叶片的初始磨削轨迹;
7.根据所述柔性磨具的几何形状以及所述初始磨削轨迹获取柔性磨具的运动包络面;
8.根据所述柔性磨具的运动包络面以及待磨削叶片的曲面离散点云数据计算柔性磨具与所述待磨削叶片之间的最小有向距离;
9.根据所述柔性磨具的磨削特性以及所述最小有向距离求解所述柔性磨具的磨削去除量;
10.对所述磨削去除量进行迭代优化,得到所述柔性磨具的磨削路径。
11.进一步地,还包括在所述根据所述柔性磨具的运动包络面以及待磨削叶片的曲面离散点云数据计算柔性磨具与所述待磨削叶片之间的最小有向距离的步骤前进行的:
12.根据所述待磨削叶片的几何形状获取待磨削叶片的曲面离散点云数据。
13.进一步地,所述根据所述柔性磨具的运动包络面以及待磨削叶片的曲面离散点云数据计算柔性磨具与所述待磨削叶片之间的最小有向距离,包括:
14.从所述待磨削叶片的曲面离散点云数据中选取一个离散点p,则在所述柔性磨具的运动包络面x(w)上至少存在一点q满足则离散点p与所述柔性磨具的运动包络面x(w)间的距离定义为d
p,x(w)
=||p-q||,点q为离散点p在所述柔性磨具的运动
包络面x(w)上的最近点;
15.当所述柔性磨具的运动包络面x(w)上存在离散点p的足点q时,离散点p到所述柔性磨具的运动包络面x(w)的最小有向距离为其中,表示离散点p位于所述柔性磨具的扫掠体外部,表示离散点p位于所述柔性磨具的扫掠体内部,表示离散点p位于所述柔性磨具的扫掠体包络面上。
16.进一步地,所述根据所述柔性磨具的磨削特性以及所述最小有向距离求解所述柔性磨具的磨削去除量,包括:
17.根据所述柔性磨具的磨削特性求解所述最小有向距离与实际磨削量的误差大小关系;
18.根据所述误差大小关系以及所述最小有向距离求解所述柔性磨具的磨削去除量。
19.进一步地,所述根据所述柔性磨具的磨削特性求解所述最小有向距离与实际磨削量的误差大小关系,包括:
20.获取根据所述柔性磨具的运动包络面与所述待磨削叶片的接触点;
21.计算所述接触点的曲率半径;
22.根据所述接触点的曲率半径确定所述柔性磨具的运动包络面的形状,其中所述形状包括凸面形状和凹面形状;
23.分别计算凸面形状和凹面形状下的所述柔性磨具的变形量与所述待磨削叶片的径向材料去除深度之间的关系。
24.进一步地,所述计算所述接触点的曲率半径,包括:
25.沿所述初始磨削轨迹方向的相邻点计算接触点的曲率半径。
26.进一步地,所述分别计算凸面形状和凹面形状下的所述柔性磨具的变形量与所述待磨削叶片的径向材料去除深度之间的关系,包括:
27.根据hertz弹性接触理论确定磨削力与接触宽度的关系:
[0028][0029]
根据preston假设和待磨削叶片的几何形状分别得到凸面形状和凹面形状的径向材料去除率:
[0030][0031][0032]
其中,h
m1
表示凸面形状下的径向材料去除率,h
m2
表示凹面形状下的径向材料去除
率;
[0033]
根据材料去除恒定原则得到所述柔性磨具的径向材料去除深度:
[0034][0035]
其中,a
p
表示所述柔性模具的径向材料去除深度,hm表示柔性磨具的运动包络面的形状,v表示所述柔性磨具的进给速度,dl表示所述柔性磨具在待剥削叶片上移动的单位距离。
[0036]
进一步地,所述对所述磨削去除量进行迭代优化,得到所述柔性磨具的磨削路径,包括:
[0037]
根据最大误差最小化方法对所述磨削去除量进行多次迭代计算,得到所述柔性磨具的磨削路径。
[0038]
进一步地,所述根据最大误差最小化方法对所述磨削去除量进行多次迭代计算,得到所述柔性磨具的磨削路径,包括:
[0039]
根据最大误差最小化方法的优化公式对所述柔性磨具与所述待磨削叶片之间的所有接触点的磨削去除量进行多次迭代计算,得到优化后的所述柔性磨具的磨削路径,其中所述最大误差最小化方法的优化公式为:
[0040][0041]
其中,ξ表示松弛变量,表示最小有向距离。
[0042]
进一步地,所述柔性磨具包括百页轮。
[0043]
本发明提供的用于柔性磨具的路径规划方法,适用于柔性磨具,由于采用柔性磨具能够能够传统整体叶盘磨削中存在的叶片轮廓一致性差的问题,因此本发明通过柔性模具的特性和最大误差最小化方法对传统路径进行改进和优化,采用恒材料去除使加工过程中叶片受力均匀,从而提高了叶片的加工质量。另外,该方法能够有效控制去除量,减少磨削次数,从而减少加工时间。由于加工过程平稳,磨削力变化小,从而减小磨具磨损,延长磨具使用寿命。
附图说明
[0044]
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
[0045]
图1为本发明提供的用于柔性磨具的路径规划方法的流程图。
具体实施方式
[0046]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互结合。下面将参考附图并结合实施例来详细说明本发明。
[0047]
为了使本领域技术人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员
在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
[0048]
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包括,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0049]
由于整体叶盘叶片磨削作为整体叶盘加工中最精密的一道工序,其加工效果会影响整体叶盘的使用寿命。针对整体叶盘磨削加工,可以从以下三个方面进行提高和改进:磨具材料和形状、磨削参数的选择、磨削轨迹的规划。本发明从磨削轨迹规划方面来进行优化,以提高叶片表面质量。在本实施例中提供了一种用于柔性磨具的路径规划方法,图1是根据本发明实施例提供的用于柔性磨具的路径规划方法的流程图,如图1所示,包括:
[0050]
s110、根据待磨削叶片的几何形状以及柔性磨具的工艺参数获取待磨削叶片的初始磨削轨迹;
[0051]
在本发明实施例中,所述柔性模具具体可以为百页轮,因此可以根据百页轮的工艺参数以及待磨削叶片的几何形状通过cam软件生成整体叶盘叶片的磨削轨迹源文件,该磨削轨迹源文件包含待磨削叶片的初始磨削轨迹以及百页轮的工艺参数等信息,可以方便后续的建模。
[0052]
本领域技术人员应当理解的是,柔性模具还可以为其他类型,此处并不做限定。
[0053]
具体地,根据整体叶盘叶片的几何形状和加工工艺参数,在cam软件中用规划好的整体叶盘绕铣路径,例如轴向切深可以设置为1mm,并导出描述刀位点坐标及刀轴矢量的刀位轨迹源文件,后缀名为.cls,且其行格式为:goto/x,y,z,i,j,k;goto/标示符后前三项数据,x,y,z为加工坐标系下的刀位点坐标,后三项数据i,j,k为其对应的刀轴矢量。
[0054]
s120、根据所述柔性模具的几何形状以及所述初始磨削轨迹获取柔性磨具的运动包络面;
[0055]
具体地,可以根据百页轮的几何形状以及所述初始磨削轨迹获得百页轮的运动包络面,具体可以采用双参数球族法进行构建。
[0056]
s130、根据所述柔性磨具的运动包络面以及待磨削叶片的曲面离散点云数据计算柔性磨具与所述待磨削叶片之间的最小有向距离;
[0057]
在本发明实施例中,需要先根据所述待磨削叶片的几何形状获取待磨削叶片的曲面离散点云数据。
[0058]
具体地,根据整体叶盘叶片的几何形状,采用三维软件获取设计曲面离散后的点云数据。在本实施例中,采用nx12.0进行离散并导出点云数据。
[0059]
进一步具体地,所述根据所述柔性磨具的运动包络面以及待磨削叶片的曲面离散点云数据计算柔性磨具与所述待磨削叶片之间的最小有向距离,包括:
[0060]
从所述待磨削叶片的曲面离散点云数据中选取一个离散点p,则在所述柔性磨具的运动包络面x(w)上至少存在一点q满足则离散点p与所述柔性磨具的运动包络面x(w)间的距离定义为d
p,x(w)
=||p-q||,点q为离散点p在所述柔性磨具的运动
包络面x(w)上的最近点;
[0061]
当所述柔性磨具的运动包络面x(w)上存在离散点p的足点q时,离散点p到所述柔性磨具的运动包络面x(w)的最小有向距离为其中,表示离散点p位于所述柔性磨具的扫掠体外部,表示离散点p位于所述柔性磨具的扫掠体内部,表示离散点p位于所述柔性磨具的扫掠体包络面上。
[0062]
s140、根据所述柔性磨具的磨削特性以及所述最小有向距离求解所述柔性磨具的磨削去除量;
[0063]
在本发明实施例中,具体可以包括:
[0064]
根据所述柔性磨具的磨削特性求解所述最小有向距离与实际磨削量的误差大小关系;
[0065]
根据所述误差大小关系以及所述最小有向距离求解所述柔性磨具的磨削去除量。
[0066]
进一步具体地,所述根据所述柔性磨具的磨削特性求解所述最小有向距离与实际磨削量的误差大小关系,包括:
[0067]
(1)获取根据所述柔性磨具的运动包络面与所述待磨削叶片的接触点;
[0068]
(2)计算所述接触点的曲率半径;
[0069]
具体地,沿所述初始磨削轨迹方向的相邻点q1和q3计算接触点q2的曲率半径,此处q1(x1,y1,z1),q2(x2,y2,z2),q3(x3,y3,z3)。
[0070]
在本发明实施例中,建立第一约束条件和第二约束条件,其中所述第一约束条件包括三点共面,所述第二约束条件包括三点到圆心的距离相等;
[0071]
根据所述第二约束条件建立方程组为:
[0072][0073]
其中,
[0074]
根据所述第一约束条件建立方程为:
[0075]
[0076]
其中,
[0077]
根据上面求得的公式(21)、(22)和(23)建立线性方程组:
[0078][0079]
得到半径r2:其中,
[0080][0081]
(3)根据所述接触点的曲率半径确定所述柔性磨具的运动包络面的形状,其中所述形状包括凸面形状和凹面形状;
[0082]
应当理解的是,根据接触点处曲率半径方向的不同可以分为凸面形状和凹面形状。
[0083]
(4)分别计算凸面形状和凹面形状下的所述柔性磨具的变形量与所述待磨削叶片的径向材料去除深度之间的关系。
[0084]
在本发明实施例中,具体可以包括:
[0085]
根据hertz弹性接触理论确定磨削力与接触宽度的关系:
[0086][0087]
根据preston假设和待磨削叶片的几何形状分别得到凸面形状和凹面形状的径向材料去除率:
[0088][0089]
[0090]
其中,h
m1
表示凸面形状下的径向材料去除率,h
m2
表示凹面形状下的径向材料去除率;
[0091]
根据材料去除恒定原则得到所述柔性磨具的径向材料去除深度:
[0092][0093]
其中,a
p
表示所述柔性模具的径向材料去除深度,hm表示柔性磨具的运动包络面的形状,v表示所述柔性磨具的进给速度,dl表示所述柔性磨具在待剥削叶片上移动的单位距离。
[0094]
s150、对所述磨削去除量进行迭代优化,得到所述柔性磨具的磨削路径。
[0095]
在本发明实施例中,具体可以包括:根据最大误差最小化方法对所述磨削去除量进行多次迭代计算,得到所述柔性磨具的磨削路径。
[0096]
进一步具体地,根据最大误差最小化方法的优化公式对所述柔性磨具与所述待磨削叶片之间的所有接触点的磨削去除量进行多次迭代计算,得到优化后的所述柔性磨具的磨削路径,其中所述最大误差最小化方法的优化公式为:
[0097][0098]
其中,ξ表示松弛变量,表示最小有向距离。
[0099]
应当理解的是,引入松弛变量ξ,将不可微无约束优化问题转化为可微约束优化问题,由于百页轮是完全贴合在叶片上,即所有位置都是过切,通过对所有接触点处的实际磨削去量进行不断优化,最终获得优化后的磨削轨迹。
[0100]
综上,本发明实施例提供的用于柔性磨具的路径规划方法,适用于柔性磨具,由于采用柔性磨具能够能够传统整体叶盘磨削中存在的叶片轮廓一致性差的问题,因此本发明通过柔性模具的特性和最大误差最小化方法对传统路径进行改进和优化,采用恒材料去除使加工过程中叶片受力均匀,从而提高了叶片的加工质量。另外,该方法能够有效控制去除量,减少磨削次数,从而减少加工时间。由于加工过程平稳,磨削力变化小,从而减小磨具磨损,延长磨具使用寿命。
[0101]
可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。