1.本技术涉及谐波重复控制器领域,尤其是一种定制式谐波重复控制器。
背景技术:
2.为了促进实现“碳中和、碳达峰”目标的进程,建立以新能源为主体的新型电力系统尤为重要,基于风能、太阳能、水能、生物质能等各种新能源实现的新能源场站在与电网并网时,会使得电力系统的稳定性受到影响,其中包括系统频率波动、电压不对称等等,这使得电力系统的电压、电流波形等受到注入的周期性谐波影响,严重影响相关控制器的性能。
3.对于周期性信号的控制性能,在一定程度上决定了电力系统的控制性能。例如对于三相/单相并网变换器而言,其实际的输出信号往往存在着不同特殊频次的谐波信号,如四次谐波、六次谐波,还有包括其他与工频不成相关倍数的谐波成分以及更高次谐波。基于内模原理的重复控制能够实现对于各种频次周期性信号的稳态无误差跟踪或者消除。
4.为了实现对变换控制系统中的指定次包括(nk
±
m)次谐波的误差消除,不同学者提出了(nk
±
m)次谐波重复控制器。其中wenzhou lu等在“a generic digitalnk
±
m-order harmonic repetitive control scheme for pwm converters”,ieeetransactions on industrial electronics,2013中提出的(nk
±
m)次谐波重复控制器,以及在专利“一种定制式谐波重复控制器及控制方法”,2020文中提出的(nk
±
m) 次谐波重复控制器,均能够有效地实现对于指定次(nk
±
m)次谐波的误差消除,但是现有的各种谐波重复控制器在结构上均较为复杂,在设计和实现之中具有较大的难度。
技术实现要素:
5.本技术人针对上述问题及技术需求,提出了一种定制式谐波重复控制器,本技术的技术方案如下:
6.一种定制式谐波重复控制器,该定制式谐波重复控制器包括:
7.重复控制增益模块、第一加法环u1和周期信号发生器h(s),重复控制增益模块的输入端连接定制式谐波重复控制器的输入端获取e(s),重复控制增益模块的输出端连接第一加法环u1的一个正输入端,第一加法环u1的输出端连接周期信号发生器h(s)的输入端,周期信号发生器h(s)的输出端连接第一加法环u1 的另一个正输入端,周期信号发生器h(s)的输出端还连接定制式谐波重复控制器的输出端输出c(s);
8.在周期信号发生器h(s)中:周期信号发生器h(s)的输入端连接第二加法环 u2的一个正输入端以及第一时间延迟模块τ1的输入端,第一时间延迟模块τ1的输出端连接减法环u0的负输入端,减法环u0的输出端连接第二时间延迟模块τ2的输入端,第二时间延迟模块τ2的输出端连接周期信号发生器h(s)的输出端,周期信号发生器h(s)的输出端连接第二加法环u2的另一个正输入端,第二加法环u2的输出端连接正前馈增益模块后连接减法环u0的正输入端;
9.其中,重复控制增益模块对输入量实现的增益为k
rc
,第一时间延迟模块对输入量延迟后输出,第二时间延迟模块对输入量延迟后输出,正前馈增益模块实现的增益为cos(2πm/n),定制式谐波重复控制器用于实现(nk
±
m)次谐波的跟踪与消除,t0为基波周期,n、m、k均为不小于零的整数且n≠0、n》m。
10.本技术的有益技术效果是:
11.本技术公开了一种定制式谐波重复控制器,该定制式谐波重复控制器由两个时间延迟模块和一个正前馈增益模块构成一个左右对称且结构简单的前向通道,并具有输出正反馈形式,使得该定制式谐波重复控制器符合标准的内模结构,可以实现对于指定次数谐波的精确、迅速控制,控制器的结构简单、美观,设计方便。通过配置不同的n、m参数实现对于不同应用场景下的指定次数谐波的抑制,因此,在k
rc
相同的情形下,能够具有更加快速的控制速度。
12.该定制式谐波重复控制器的前向通道中的两个时间延迟模块完全相同,占用的总内存数较少,因此该定制式谐波重复控制器占用内存的存储单元较少,在具有消除扰动误差速度优势的同时,还具有一般通用性,可以进一步配置参数实现对于指定次数谐波的精确、迅速控制。
13.该定制式谐波重复控制器还可以进一步扩展形成l阶周期信号发生器级联的结构以进一步优化控制性能,尤其在基频发生变化时,也能够表现出良好的谐波抑制能力以及快速性能。
14.该定制式谐波重复控制器还可以进一步扩展形成多控制通道并联结构,且能实现对于所有或者指定次数谐波的消除,并且可以独立调节各次谐波控制增益,以进一步优化控制性能。
15.该定制式谐波重复控制器还可以进一步内置分数阶滤波器,传统的重复控制器在面对基频波动时,会使得重复控制器中的周期参数n存在为非整数的情况,严重地影响了重复控制器的控制性能,因此该定制式谐波重复控制器中内置分数阶滤波器后可以提高重复控制器的谐波抑制能力。
16.该定制式谐波重复控制器还可以进一步内置低通滤波器以提高鲁棒性,还可以进一步内置相位超前补偿器或者使时间延迟模块受控于时间延迟阻尼系数,以补偿控制对象以及低通滤波器带来的相位滞后,改善控制器的稳定性,进一步优化该定制式谐波重复控制器的控制性能。
附图说明
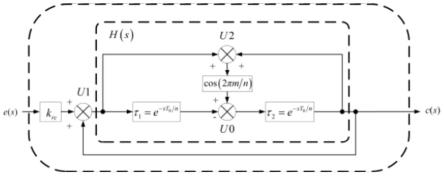
17.图1是本技术一个实施例中的定制式谐波重复控制器的控制结构图。
18.图2是图1对应的数字形式的控制结构图。
19.图3是本技术一个实施例中内置低通滤波器和相位超前补偿器的定制式谐波重复控制器的控制结构图。
20.图4是本技术一个实施例中内置低通滤波器和时间延迟阻尼系数的定制式谐波重复控制器的控制结构图。
21.图5是本技术一个实施例中内置低通滤波器、相位超前补偿器和分数阶滤波器的定制式谐波重复控制器的控制结构图。
22.图6是本技术一个实施例中包括并联的多个控制通道的定制式谐波重复控制器的控制结构图。
23.图7是本技术另一个实施例中包括并联的多个控制通道、且内置低通滤波器和相位超前补偿器的定制式谐波重复控制器的控制结构图。
24.图8是在图6所示的实施例中增加低通滤波器和和时间延迟阻尼系数时的控制结构图。
25.图9是本技术一个实施例中包括级联的多阶周期信号发生器的定制式谐波重复控制器的控制结构图。
26.图10是本技术一个实施例中包括级联的两阶周期信号发生器,且内置低通滤波器和相位超前补偿器的定制式谐波重复控制器的控制结构图。
27.图11是本技术一个实施例中包括级联的两阶周期信号发生器,且内置低通滤波器和时间延迟阻尼系数的定制式谐波重复控制器的控制结构图。
28.图12是本技术一个实施例中内置该定制式谐波重复控制器的反馈控制系统的系统结构图。
29.图13是一个仿真实例中利用本技术一个实例的定制式谐波重复控制器时的仿真结果图,(a)是稳态输出电流fft分析波形,(b)是误差收敛变化图。
30.图14是一个仿真实例中利用传统的crc控制器时的仿真结果图,(a)是稳态输出电流fft分析波形,(b)是误差收敛变化图。
31.图15是一个仿真实例中利用专利“一种定制式谐波重复控制器及控制方法”中提出的(6k
±
1)次谐波重复控制器时的仿真结果图,(a)是稳态输出电流 fft分析波形,(b)是误差收敛变化图。
32.图16是一个仿真实例中利用本技术的一阶定制式谐波重复控制器时的仿真结果图,(a)是稳态输出电流fft分析波形,(b)是误差收敛变化图。
33.图17是一个仿真实例中利用本技术的二阶定制式谐波重复控制器时的仿真结果图,(a)是稳态输出电流fft分析波形,(b)是误差收敛变化图。
34.图18是一个仿真实例中利用未内置分数阶滤波器的定制式谐波重复控制器时的仿真结果图,(a)是稳态输出电流fft分析波形,(b)是误差收敛变化图。
35.图19是一个仿真实例中利用内置分数阶滤波器的定制式谐波重复控制器时的仿真结果图,(a)是稳态输出电流fft分析波形,(b)是误差收敛变化图。
具体实施方式
36.下面结合附图对本技术的具体实施方式做进一步说明。
37.本技术公开了一种定制式谐波重复控制器,请参考图1,该定制式谐波重复控制器包括重复控制增益模块、第一加法环u1和周期信号发生器h(s)。重复控制增益模块的输入端连接定制式谐波重复控制器的输入端获取误差输入量 e(s),重复控制增益模块的输出端连接第一加法环u1的一个正输入端,第一加法环u1的输出端连接周期信号发生器h(s)的输入端,周期信号发生器h(s)的输出端连接第一加法环u1的另一个正输入端,周期信号发生器h(s)的输出端还连接定制式谐波重复控制器的输出端输出c(s)。
38.在周期信号发生器h(s)中:周期信号发生器h(s)的输入端连接第二加法环 u2的
一个正输入端以及第一时间延迟模块τ1的输入端,第一时间延迟模块τ1的输出端连接减法环u0的负输入端,减法环u0的输出端连接第二时间延迟模块τ2的输入端,第二时间延迟模块τ2的输出端连接周期信号发生器h(s)的输出端,周期信号发生器h(s)的输出端连接第二加法环u2的另一个正输入端,第二加法环u2的输出端连接正前馈增益模块后连接减法环u0的正输入端。
39.其中,重复控制增益模块对输入量实现的增益为k
rc
,第一时间延迟模块对输入量延迟后输出,第二时间延迟模块对输入量延迟后输出,正前馈增益模块实现的增益为cos(2πm/n)。
40.周期信号发生器h(s)的传递函数为因此图1 的实施例中,该定制式谐波重复控制器的传递函数为:
[0041][0042]
其中,t0为基波周期,f0为基波频率,ω0为基波角频率。e为自然底数,s为s平面参数,n、m、k为不小于零的整数且n≠0、n》m。
[0043]
当m≠0时上述传递函数可以变形为:
[0044][0045]
当m=0时,可以简化如下的形式:
[0046][0047]
因此,根据式(2)、(3),该定制式谐波重复控制器的g
rc
(s)的极点依旧位于
±
j(nk
±
m)ω0处,其中,k=0,1,2
…
。因此g
rc
(s)的幅频响应在(nk
±
m)次谐波频率处为无穷大,因此能够选取不同的n和m的取值来实现对于不同次谐波的精确消除,因此通过选择合适的n和m的取值,该定制式谐波重复控制器用于实现(nk
±
m)次谐波的跟踪与消除。
[0048]
在实际应用时,该定制式谐波重复控制器通常以数字形式加以设计实现,图1定制式谐波重复控制器的数字形式如图2所示,其传递函数为:
[0049][0050]
其中,c(z)是该定制式谐波重复控制器的输出量,e(z)是该定制式谐波重复控制器的误差输入量,h(z)是周期信号发生器的数字形式,为周期参数, ts为采样周期,
z为z平面参数。
[0051]
该定制式谐波重复控制器中共包括两个时间延迟模块,占用的内存单元数目为因此该定制式谐波重复控制器占用的内存总数为因此占用的存储空间比常规的重复控制器以及之前学者提及的重复控制器要少的多,因此本发明提出的特制式谐波重复控制器能够具有更加迅速的响应速度,并且具有设计简单、快捷的优势。
[0052]
在实际应用中,本技术可针对不同场景的需求,赋予参数n和m以不同的数值,即能实现对指定(nk
±
m)次谐波的无误差跟踪或扰动抑制。例如对于三相变换器带三相整流负载的情况,由于其谐波主要集中在(6k
±
l)次(即5、7、11、 13等次)谐波频率分量处,且常需要对基波参考信号进行跟踪,所以只需令n =6和m=1,就可实现对基波参考信号的无误差跟踪和对(6k
±
l)次谐波的完全消除。而对于单相变换器带单相整流负载的情况,由于其谐波主要集中在(4k
ꢀ±
l)次(即3、5、7、9等奇次)频率分量处,且常需要对基波参考信号进行跟踪,所以只需令n=4和m=1,就可实现对基波参考信号的无误差跟踪和对奇次谐波的完全消除。
[0053]
在该定制式谐波重复控制器的结构的基础上,为了进一步提高该定制式谐波重复控制器在实际应用中的鲁棒性,可以在该定制式谐波重复控制器中添加低通滤波器q(s)。为了补偿控制对象以及低通滤波器q(s)带来的相位滞后,改善控制器的稳定性,还可以在该定制式谐波重复控制器中添加相位超前补偿器 gf(s)或者使时间延迟模块受控于时间延迟阻尼系数k。
[0054]
实际应用时可以仅对定制式谐波重复控制器的鲁棒性进行优化,或者仅对稳定性进行优化,但更常用的是,由于鲁棒性和稳定性都是重要参数指标,因此本技术以同时对该定制式谐波重复控制器的鲁棒性和稳定性进行优化为例。
[0055]
一种做法是,如图3所示,周期信号发生器h(s)中的第一时间延迟模块的输出端通过第一个低通滤波器q(s)连接减法环u0,第二时间延迟模块的输出端通过第二个低通滤波器q(s)连接周期信号发生器h(s)的输出端。且周期信号发生器h(s)的输出端还通过相位超前补偿器gf(s)连接定制式谐波重复控制器的输出端。在该实施例中,两个时间延迟模块实现的延迟仍然可以为
[0056]
图3所示的定制式谐波重复控制器同样可以采用数字形式实现,后续其他实施例中的结构也都可以采用数字形式实现,但本技术不再一一单独进行图示。在图3所示的结构中,定制式谐波重复控制器的传递函数:
[0057][0058]
另一种做法是,如图4所示,周期信号发生器h(s)中的第一时间延迟模块的输出端通过第一个低通滤波器q(s)连接减法环u0,第二时间延迟模块的输出端通过第二个低通滤波器q(s)连接周期信号发生器h(s)的输出端。且周期信号发生器h(s)中的两个时间延迟模块实现的延迟均受控于时间延迟阻尼系数k而为
[0059]
无论是在图3的基础上还是图4的基础上,在另一个实施例中,该周期信号发生器h(s)中的第一个低通滤波器q(s)还通过第一个分数阶滤波器g
p
(s)连接减法环u0,第二个低
通滤波器q(s)还通过第二个分数阶滤波器g
p
(s)连接周期信号发生器h(s)的输出端。图5以在图3结构基础上增加g
p
(s)的情况为例,在图4结构的基础上增加g
p
(s)的情况也是类似的,本技术不再单独图示。基于图5的结构,该定制式谐波重复控制器的传递函数为:
[0060][0061]
该定制式谐波重复控制器能够在基频发生突变时,有效地解决重复控制器的内模与指定周期信号在响应的频率的谐振点失配的问题,其中分数阶滤波器 g
p
(s)能够有效补偿重复控制器的周期参数n的分数部分,进一步地改善控制系统的稳定性和鲁棒性。
[0062]
图1-5示出了该定制式谐波重复控制器中使用单控制通道的结构及各种变形,在另一个实施例中,该定制式谐波重复控制器可以在单控制通道的结构上进一步扩展形成多控制通道并联的结构。该定制式谐波重复控制器包括p 1个控制通道以及第三加法环u3,每个控制通道中包括重复控制增益模块和周期信号发生器h(s),各个控制通道中的重复控制增益模块的输入端均连接定制式谐波重复控制器的输入端获取e(s),各个控制通道中的重复控制增益模块的输出端分别连接所在控制通道内的周期信号发生器h(s)的输入端,各个控制通道中的周期信号发生器h(s)的输出端分别连接第三加法环u3的一个正输入端,第三加法环u3的输出端连接定制式谐波重复控制器的输出端,第三加法环u3对各个控制通道的输出量相加后输出端输出c(s)。
[0063]
在一个实施例中,p=m,因此如图6所示,该定制式谐波重复控制器包括m 1个控制通道分别记为控制通道0~控制通道m,每个控制通道的结构均与图 1所示的结构类似,但是各个控制通道中的重复控制增益模块实现的增益有所区别,任意第i个控制通道中的重复控制增益模块实现的增益为另外各个控制通道包含的周期信号发生器h(s)中的两个时间延迟模块实现的延迟均为但是各个控制通道中的正前馈增益模块实现的增益有所区别,任意第i个控制通道包含的周期信号发生器hi(s)的正前馈增益模块实现的增益为 cos(2πi/n)。i为参数,在该实施例中由于p=m,从而使得i为参数且i∈[0,m]。在图6所示的实施例中,该定制式谐波重复控制器的传递函数为:
[0064][0065]
其中,n和m都为正整数,且n为偶数时、m∈[0,n/2];n为奇数时, m∈[0,[n/2]],[n/2]表示对n/2取整,通过选取不同的n和m,该定制式谐波重复控制器可以用于实现对所有次谐波的消除。
[0066]
在另一个实施例中,如图7所示,每个控制通道的结构均与图1所示的结构类似,但是各个控制通道中的重复控制增益模块实现的增益有所区别,任意第i个控制通道中的重复控制增益模块实现的增益为另外各个控制通道包含的周期信号发生器h(s)中的时间延迟模块实现的延迟有所区别,任意第i个控制通道包含的周期信号发生器hi(s)中的两个时间延迟模块实现的延迟为另外各个控制通道包含的周期信号发生器h(s)中的正前馈增益模块实现的增益也有所区别,任意第i个控制通道包含的周期信号发生器hi(s)中的正前馈增益模块实现的增益为cos(2πmi/ni)。该定制式谐波重复控制器的传递函数为:
[0067][0068]
其中,i为参数且i∈[0,p]ni和mi均为任意正整数。定制式谐波重复控制器可以用于实现对指定次谐波的消除且各次谐波的增益具有独立调节功,也即可以独立地调节各次谐波的控制增益。
[0069]
不管是采用图6所示的多控制通道并联结构,还是采用图7所示的多控制通道并联结构,在此基础上同样可以进一步提高该定制式谐波重复控制器的鲁棒性和稳定性。
[0070]
与单控制通道的结构类似,在一个实施例中,通过增加低通滤波器和相位超前补偿器来提高该定制式谐波重复控制器的鲁棒性和稳定性,如图7所示,任意第i个控制通道中的周期信号发生器hi(s)的第一时间延迟模块的输出端通过一个低通滤波器qi(s)连接减法环u0,第二时间延迟模块的输出端通过另一个低通滤波器qi(s)连接周期信号发生器hi(s)的输出端。且第三加法环u3的输出端通过相位超前补偿器gf(s)连接该定制式谐波重复控制器的输出端输出c(s)。则当在图6所示的多控制通道并联结构中采用该实施例的做法增加相位超前补偿器gf(s)以及各个控制通道内的低通滤波器qi(s)时,本技术未图示,该定制式谐波重复控制器的传递函数在上述式(7)的基础上进一步变为:
[0071][0072]
当在图7所示的多控制通道并联结构中采用该实施例的做法增加相位超前补偿器gf(s)以及各个控制通道内的低通滤波器qi(s)时,图7即以此为例,该定制式谐波重复控制器的传递函数在式(8)的基础上进一步变为:
[0073][0074]
与单控制通道的结构类似,在另一个实施例中,通过增加低通滤波器和相位超前补偿器来提高该定制式谐波重复控制器的鲁棒性和稳定性,如图7所示,通过增加低通滤波器和时间延迟阻尼系数也可以提高该定制式谐波重复控制器的鲁棒性和稳定性。则在该实施例中,任意第i个控制通道中的周期信号发生器 hi(s)的第一时间延迟模块的输出端通过一个低通滤波器qi(s)连接减法环u0,第二时间延迟模块的输出端通过另一个低通滤波器qi(s)连接周期信号发生器 hi(s)的输出端,且第i个控制通道中的两个时间延迟模块实现的延迟还受控于时间延迟阻尼系数k。因此对于图6所示的多控制通道并联结构,所有控制通道中的时间延迟模块实现的延迟均受控于时间延迟阻尼系数k而为如图8以此情况为例。而对于图7所示的多控制通道并联结构,任意第i个控制通道中的时间延迟模块实现的延迟受控于时间延迟阻尼系数k而为未示出这种情况。
[0075]
在另一个实施例中,除了可以由单控制通道扩展形成多控制通道并联结构以外,还可以在每个控制通道中进行扩展而级联若干阶周期信号发生器h(s)。请参考图9,第一加法环u1的输出端和定制式谐波重复控制器的输出端之间设置有l阶周期信号发生器h(s),第一阶周期信号发生器h1(s)的输入端连接第一加法环u1的输出端,从第二阶周期信号发生器开始,任意第l阶周期信号发生器h
l
(s)的输入端连接第l-1阶周期信号发生器h
l-1
(s)
的输出端,l为参数且 l∈[1,l]。任意第l阶周期信号发生器h
l
(s)的输出端通过一个第l常系数m
l
连接第四加法环u4的一个正输入端,第四加法环u4的输出端连接定制式谐波重复控制器的输出端以及第一加法环u1的另一个正输入端。基于图1部分介绍的各阶周期信号发生器h(s)的传递函数,图9所示的实施例中的定制式谐波重复控制器的传递函数可以基于各阶周期信号发生器h(s)的传递函数表示为:
[0076][0077]
在图9所示的多阶周期信号发生器h(s)级联的结构的基础上,同样可以通过增加低通滤波器和相位超前补偿器或者增加低通滤波器和时间延迟阻尼系数来进一步提高该定制式谐波重复控制器的鲁棒性和稳定性。
[0078]
级联的周期信号发生器的阶数l越多,该定制式谐波重复控制器可以有更快的控制响应,从而可以获得更好的控制性能,但也会导致设计复杂度变大,为了平衡两方面性能,一般取如图10取l=2,由此该定制式谐波重复控制器的传递函数可以基于各阶周期信号发生器h(s)的传递函数表示为:
[0079][0080]
在一个实施例中,通过增加低通滤波器和相位超前补偿器来提高鲁棒性和稳定性,则第四加法环u4的输出端依次通过低通滤波器q(s)和相位超前补偿器 gf(s)连接定制式谐波重复控制器的输出端以输出c(s)。低通滤波器q(s)的输出端连接第一加法环u1的另一个正输入端使得第四加法环u4的输出端通过低通滤波器q(s)连接第一加法环u1的另一个正输入端。如图10以l=2的情况为例示出了该实施例的结构。在该实施例中,定制式谐波重复控制器的传递函数为:
[0081][0082]
在另一个实施例中,也可以通过增加低通滤波器q(s)和时间延迟阻尼系数 k来提高鲁棒性和稳定性,则第四加法环u4的输出端通过低通滤波器q(s)连接第一加法环u1的另一个正输入端以及定制式谐波重复控制器的输出端,且每一阶周期信号发生器中的两个时间延迟模块实现的延迟均为k为时间延迟阻尼系数。如图11以l=2的情况为例示出了该实施例的结构。
[0083]
将图10和图11与图3进行对比可以看出,当有多阶周期信号发生器级联时,级联的多阶周期信号发生器可以共用一个低通滤波器q(s),而无需像图3 一样在每一阶周期信号发生器中分别内置低通滤波器,从而有效地降低了结构复杂度。
[0084]
本技术通过上述各个实施例提供的定制式谐波重复控制器可以应用于各类反馈控制系统中以实现对于指定(nk
±
m)次谐波的跟踪与消除。请参考图12,减法环u5的正输入端连接该反馈控制系统的输入端获取参考输入信号i
ref
(s),减法环u5的负输入端连接该反
馈控制系统的输出端获取实际输出信号i(s),减法环u5的输出端连接该定制式谐波重复控制器g
rc
(s)的输入端提供e(s),减法环 u5的输出端还连接加法环u6的一个正输入端,定制式谐波重复控制器g
rc
(s)的输出端连接加法环u6的另一个正输入端提供c(s)。加法环u6的输出端连接传统反馈控制器gc(s)的输入端,传统反馈控制器gc(s)的输出端连接控制对象go(s) 的输入端提供u(s)作为控制对象go(s)的输入信号,控制对象go(s)的输出端连接加法环u7的一个正输入端,加法环u7的另一个正输入端连接系统扰动输入 d(s),加法环u7的输出端连接该反馈控制系统的输出端以输出实际输出信号 i(s)。定制式谐波重复控制器g
rc
(s)是本技术上述各个实施例中的定制式谐波重复控制器。
[0085]
为了说明本技术的定制式谐波重复控制器的实用性和有效性,采用了基于 matlab/simulink的仿真验证,搭建三相并网逆变控制系统作为反馈控制系统。在三相并网逆变控制系统之中,由于其谐波主要集中在(6k
±
l)次(即5、7、 11、13等奇次)频率分量处,且需要对基波参考信号进行跟踪,所以只需令n =6和m=1,就可实现对基波参考信号的无误差跟踪和对指定次谐波的完全消除,控制目标为使输出电流精确跟踪参考电压,其中参考电流 i
ref
(s)=6.53*sin(100πt)。在传统反馈控制器gc(s)均采用传统无差拍控制器db、重复控制增益k
rc
相同且均在t=0.1s时加入重复控制器的情况下,对比仿真结果如图13-15所示:
[0086]
在反馈控制系统中加入本技术的定制式谐波重复控制器并取n=6和m=1 实现6k
±
1定制式谐波重复控制器时,稳态输出电流fft分析波形和误差收敛变化图分别如图13中的(a)和(b)所示。
[0087]
在反馈控制系统中加入传统重复控制器即crc控制器时的稳态输出电流fft分析波形和误差收敛变化图分别如图14中的(a)和(b)所示。
[0088]
在反馈控制系统中加入专利“一种定制式谐波重复控制器及控制方法”中提出的(6k
±
1)次谐波重复控制器时的稳态输出电流fft分析波形和误差收敛变化图分别如图15中的(a)和(b)所示。
[0089]
对比图13-15可知,在上述三个仿真实例中,总谐波畸变率(total harmonicdistortion,thd)分别为0.11%、0.25%和0.24%,都可以达到非常小的数值。但是在达到几乎同样的谐波抑制效果的情况下,在采用本技术的6k
±
1定制式谐波重复控制器时只需约0.04s就达到稳态,而采用传统的crc控制器时需要约 0.1s才能达到稳态,专利“一种定制式谐波重复控制器及控制方法”中提出的 (6k
±
1)次谐波重复控制器则需要约0.16s才能达到稳态,因此本技术的6k
±
1谐波重复控制器的误差收敛速度具有显著优势、约为传统的crc控制器的3倍。
[0090]
为了进一步提高6k
±
1定制式谐波重复控制器的快速响应速度,上述仿真实例中,可以采用l=2阶周期信号发生器级联的二阶6k
±
1定制式谐波重复控制器。在反馈控制系统中加入一阶6k
±
1定制式谐波重复控制器时的稳态输出电流fft分析波形和误差收敛变化图分别如图16中的(a)和(b)所示,在反馈控制系统中加入二阶6k
±
1定制式谐波重复控制器时的稳态输出电流fft 分析波形和误差收敛变化图分别如图17中的(a)和(b)所示。对比图16和图17可以看出,当在反馈控制系统中加入一阶或二阶6k
±
1定制式谐波重复控制器时,电网频率偏移0.5hz,即网侧频率设置为49.5hz,此时二阶6k
±
1定制式谐波重复控制器在具有与一阶6k
±
1定制式谐波重复控制器几乎同样的谐波抑制效果的同时(二阶和一
阶6k
±
1定制式谐波重复控制器下的总谐波畸变率分别为0.55%和0.47%),一阶6k
±
1定制式谐波重复控制器需要约0.05s 达到稳态,而二阶6k
±
1定制式谐波重复控制器仅需要约0.03s达到稳态,并且稳态时的电感电流的收敛误差分别为0.4219a和0.7596a。因此采用多阶周期信号发生器级联的定制式谐波重复控制器可以具有更快的控制相应而具有更加的控制性能优势。
[0091]
在另一个仿真实例中,所采用的6k
±
1定制式谐波重复控制器还可以如图 5对应的实施例记载的结合分数阶滤波器g
p
(s),基于分数阶的特制式谐波重复控制器。在面对电网频率波动时,会使得定制式谐波重复控制器中的周期参数n 存在为非整数的情况,严重地影响了定制式谐波重复控制器的控制性能,因此基于相关拉格朗日插值法等相关理论的fir滤波器能够精确近似分数延迟,按照理论,每一个延迟环节均需要一个iir相关滤波器进行近似补偿,因此,本技术的定制式谐波重复控制器,具有较少的时间延迟模块,能够进一步减少设计复杂度的优势。使用未内置iir相关滤波器的6k
±
1定制式谐波重复控制器时,当电网频率从50突变至49.5hz时稳态输出电流fft分析波形和误差收敛变化图分别如图18中的(a)和(b)所示。使用内置iir相关滤波器的6k
±
1定制式谐波重复控制器时,当电网频率从50突变至49.5hz时稳态输出电流fft 分析波形和误差收敛变化图分别如图19中的(a)和(b)所示。对比图18和图19可以看出,未内置iir相关滤波器和内置iir相关滤波器的6k
±
1定制式谐波重复控制器的总谐波畸变率分别为1.69%和0.21%,收敛误差分别为 0.7647和0.0761,内置iir相关滤波器的6k
±
1定制式谐波重复控制器具有更好的谐波抑制效果以及更高的误差收敛精度,在面对基频变动时具有更优越的控制性能。
[0092]
以上所述的仅是本技术的优选实施方式,本技术不限于以上实施例。可以理解,本领域技术人员在不脱离本技术的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。