1.本发明涉及巡检机器人环境检测系统技术领域,特别的为智能巡检机器人系统。
背景技术:
2.巡线机器人:巡线机器人是以移动机器人作为载体,以可见光摄像机、红外热成像仪、其它检测仪器作为载荷系统,以机器视觉—电磁场—gps—— gis的多场信息融合作为机器人自主移动与自主巡检的导航系统,以嵌入式计算机作为控制系统的软硬件开发平台。
3.在现有技术中心,使用巡检机器人对周围环境进行监测,相比于传统人工作业的方式,节省了人力物力,但是现有的多数巡检机器人在正常使用的过程中检测到周围环境异常,只能发出警报,不能够及时的做出反应,上报给后台,反应不及时可能会造成一定的安全隐患。
技术实现要素:
4.本发明提供的发明目的在于提供智能巡检机器人系统,解决上述背景技术中的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:智能巡检机器人系统,包括:
6.控制台,所述控制台在智能机器人在使用前进行预设,并且将各个指令传输到各个模块当中去;
7.升降控制模块,所述升降控制模块通过控制台预设的指令进行升降活动;
8.云台模块,所述云台模块主要是起到固定作用,并且云台模块跟随升降控制模块进行升降;
9.四要素气体浓度采集模块,所述四要素气体浓度采集模块通过四种不同的技术手段对不同的气体进行分析,并且将各个分析的结果进行储存,然后进行传输;
10.温湿度传感器模块,所述温湿度传感器模块在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对,如果出现了异常,会将现场定位发送到有关部门,防止发生意外。
11.粉尘浓度测试模块,所述粉尘浓度测试模块在运行的过程中会对空气中的粉尘浓度进行检测,因为粉尘在空气中漂浮遇,如果浓度过高在遇到明火或者较为强烈的震动时,则会发生爆炸,如果粉尘的弄到超过预设值则会直接将具体的位置信息进行上报,由工作人员进行紧急处理,提高施工时的安全性,为施工人员的安全提供保障;
12.角度调节模块,所述角度调节模块收到升降控制模块的指令后开始进行升降工作;
13.测距传感模块,所述测距传感模块对电线位置进行距离检测,然后智能巡检机器人则会向具体检测到的位置进行移动;
14.局放传感模块,所述局放传感模块在角度调节模块和测距传感模块工作过后,便开始对电线进行检测,通过采集电线上流动的高频脉冲电流信号,通过对信号高频分量分析,可确定电线是否有放电,及放电的严重程度,若有放电情况则会将位置信息传输,由工作人员进行维修,提高工作人员工作时的安全性;
15.急停模块,所述急停模块在装置遇到环境异常的状态下,紧急对升降控制模块发出指令,使升降控制模块停止工作,对周围环境进行细致的检测;
16.对讲模块,所述对讲模块可以使工作人员在使用本装置的过程中给后台的工作人员进行留言,后台人员接收到留言后便可做出反应;
17.播报模块,所述播报模块可以将后台的一些指令通过语音播报的方式传达;
18.升降故障检测模块,所述升降故障检测模块在装置工作之前对升降控制模块对其进行检测,防止升降控制模块发生损坏,装置在使用的过程中无法进行升降;
19.传输模块,所述传输模块可以使对讲模块、四要素气体浓度采集模块、测距传感模块和局放传感模块的数据进行传输,导入到后台进行处理;
20.后台数据处理模块,所述后台数据处理模块将传输模块导入的数据进行接收,如果数据异常将会发出警报,提醒后台的工作人员。
21.进一步的,所述云台模块包括红外线拍摄模块、可见光拍摄模块。
22.进一步的,所述云台模块可以将红外线拍摄模块和可见光拍摄模块进行固定,所述红外线拍摄模块可以对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,所述可见光拍摄模块对不可见光进行拍摄。
23.采用上述技术方案:在使用的过程中,首先通过控制台对装置进行数值预设当预设完毕后本装置便可以开始正常的进行工作,在工作前,升降故障检测模块,会对升降控制模块进行检测,若是有硬件问题则需要回厂返修,并且此时升降控制模块可以带动云台模块进行升降,云台模块在使用的过程中,会对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,可见光拍摄模块则对波长《380nm或者》760nm的不可见光进行拍摄,如果红外线拍摄模块或者可见光拍摄模块两个模块发生了异常直接将数据传输模块处,并且温湿度传感器模块会在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对,如果出现了异常,会将现场定位发送到有关部门,防止发生意外。
24.进一步的,所述控制台通过导线与升降控制模块电性连接,所述升降控制模块通过导线与云台模块电性连接,所述四要素气体浓度采集模块通过局域网与云台模块电性连接,所述四要素气体浓度采集模块通过导线与温湿度传感器模块电性连接,所述四要素气体浓度采集模块通过导线与粉尘浓度测试模块电性连接。
25.采用上述技术方案:云台模块在使用的过程中,会对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,可见光拍摄模块则对波长《380nm或者》760nm的不可见光进行拍摄,如果红外线拍摄模块或者可见光拍摄模块两个模块发生了异常直接将数据传输模块处,并且温湿度传感器模块会在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对,如果出现了异常,会将现场定位发送到有关部门,防止发生意外。
26.进一步的,所述急停模块与升降控制模块通过导线电性连接,所述升降故障检测
模块通过导线与升降控制模块电性连接,所述对讲模块通过导线与传输模块电性连接,所述播报模块通过导线与传输模块电性连接。
27.进一步的,所述测距传感模块通过导线与传输模块电性连接,所述局放传感模块通过导线与传输模块电性连接,所述传输模块通过局域网与后台数据处理模块无线连接。
28.采用上述技术方案:临场的人员可以通过对讲模块给后台的工作人员进行留言或者直接进行对话,而通话数据同样通过传输模块到达后台数据处理模块的位置,然后后台人员再将数据传回,通过传输模块传输到播报模块处中,实现在某些特殊地区根据相关规定无法使用手机但仍然可以和后台进行沟通的目的。
29.本发明提供了智能巡检机器人系统,具备以下有益效果:
30.1、本发明,在使用的过程中,首先通过控制台对装置进行数值预设当预设完毕后本装置便可以开始正常的进行工作,在工作前,升降故障检测模块,会对升降控制模块进行检测,若是有硬件问题则需要回厂返修,并且此时升降控制模块可以带动云台模块进行升降,云台模块在使用的过程中,会对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,可见光拍摄模块则对波长《380nm或者》760nm的不可见光进行拍摄,如果红外线拍摄模块或者可见光拍摄模块两个模块发生了异常直接将数据传输模块处,并且温湿度传感器模块会在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对,如果出现了异常,会将现场定位发送到有关部门,防止发生意外,而粉尘浓度测试模块,粉尘浓度测试模块在运行的过程中会对空气中的粉尘浓度进行检测,因为粉尘在空气中漂浮遇,如果浓度过高在遇到明火或者较为强烈的震动时,则会发生爆炸,如果粉尘的弄到超过预设值则会直接将具体的位置信息进行上报,提高施工时的安全性,为施工人员的安全提供保障,并且上述的多个模块中温湿度传感器模块、粉尘浓度测试模块、红外线拍摄模块、可见光拍摄模块都会将数据传输到传输模块处,然后有传输模块将数据传输到后台数据处理模块的位置,然后由后台数据处理模块发出警报,后台的工作人员收到警报后向有关部门进行汇报,相关部门则对其进行紧急处理。
31.2、本装置在正常的使用情况下临场的人员可以通过对讲模块给后台的工作人员进行留言或者直接进行对话,而通话数据同样通过传输模块到达后台数据处理模块的位置,然后后台人员再将数据传回,通过传输模块传输到播报模块处中,实现在某些特殊地区根据相关规定无法使用手机但仍然可以和后台进行沟通的目的。
32.3、红外线拍摄模块和可见光拍摄模块在进行工作的过程中如果发现异常情况,急停模块则会会对升降控制模块发出指令,使升降装置停留在发现异常的高度,对其进行详细拍摄,防止有意外情况发生,而测距传感模块、局放传感模块和角度调节模块是配合使用的,由测距传感模块测试处装置与测距传感模块的具体距离,装置移动到合适的位置后,通过角度调节模块调整角度,使局放传感模块通过采集电线上流动的高频脉冲电流信号,通过对信号高频分量分析,可确定电线是否有放电,及放电的严重程度,若有放电情况则会将位置信息传输,由工作人员进行维修,提高工作人员工作时的安全性。
附图说明:
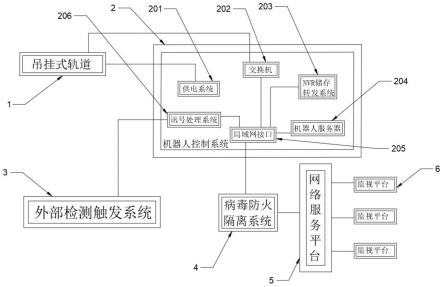
33.图1为本发明的系统图;
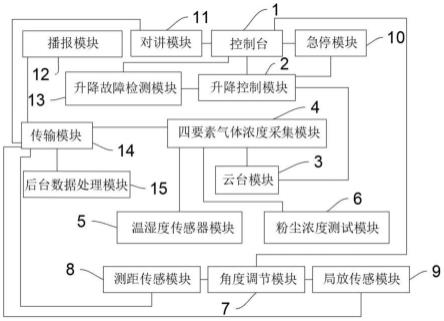
34.图2为本发明云台模块系统图。
35.图例说明:
36.1、控制台;2、升降控制模块;3、云台模块;301、红外线拍摄模块;302、可见光拍摄模块;4、四要素气体浓度采集模块;5、温湿度传感器模块;6、粉尘浓度测试模块;7、角度调节模块;8、测距传感模块;9、局放传感模块; 10、急停模块;11、对讲模块;12、播报模块;13、升降故障检测模块;14、传输模块;15、后台数据处理模块。
具体实施方式
37.如图1-2所示:智能巡检机器人系统,包括:
38.控制台1,控制台1在智能机器人在使用前进行预设,并且将各个指令传输到各个模块当中去;
39.升降控制模块2,升降控制模块2通过控制台1预设的指令进行升降活动;
40.云台模块3,云台模块3主要是起到固定作用,并且云台模块3跟随升降控制模块2进行升降,云台模块3可以将红外线拍摄模块301和可见光拍摄模块302进行固定,红外线拍摄模块301可以对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,可见光拍摄模块302对波长《380nm或者》760nm的不可见光进行拍摄。
41.四要素气体浓度采集模块4,四要素气体浓度采集模块4通过四种不同的技术手段对不同的气体进行分析,并且将各个分析的结果进行储存,然后进行传输;
42.温湿度传感器模块5,温湿度传感器模块5在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对,如果出现了异常,会将现场定位发送到有关部门,防止发生意外。
43.粉尘浓度测试模块6,粉尘浓度测试模块6在运行的过程中会对空气中的粉尘浓度进行检测,因为粉尘在空气中漂浮遇,如果浓度过高在遇到明火或者较为强烈的震动时,则会发生爆炸,如果粉尘的弄到超过预设值则会直接将具体的位置信息进行上报,由工作人员进行紧急处理,提高施工时的安全性,为施工人员的安全提供保障;
44.角度调节模块7,角度调节模块7收到升降控制模块2的指令后开始进行升降工作;
45.测距传感模块8,测距传感模块8对电线位置进行距离检测,然后智能巡检机器人则会向具体检测到的位置进行移动;
46.局放传感模块9,局放传感模块9在角度调节模块7和测距传感模块8工作过后,便开始对电线进行检测,通过采集电线上流动的高频脉冲电流信号,通过对信号高频分量分析,可确定电线是否有放电,及放电的严重程度,若有放电情况则会将位置信息传输,由工作人员进行维修,提高工作人员工作时的安全性;
47.急停模块10,急停模块10在装置遇到环境异常的状态下,紧急对升降控制模块2发出指令,使升降控制模块2停止工作,对周围环境进行细致的检测;
48.对讲模块11,对讲模块11可以使工作人员在使用本装置的过程中给后台的工作人员进行留言,后台人员接收到留言后便可做出反应;
49.播报模块12,播报模块12可以将后台的一些指令通过语音播报的方式传达;
50.升降故障检测模块13,升降故障检测模块13在装置工作之前对升降控制模块2对其进行检测,防止升降控制模块2发生损坏,装置在使用的过程中无法进行升降;
51.传输模块14,传输模块14可以使对讲模块11、四要素气体浓度采集模块 4、测距传
感模块8和局放传感模块9的数据进行传输,导入到后台进行处理;
52.后台数据处理模块15,后台数据处理模块15将传输模块14导入的数据进行接收,如果数据异常将会发出警报,提醒后台的工作人员;
53.红外线拍摄模块301通过局域网与四要素气体浓度采集模块4无线连接,红外线拍摄模块301通过局域网与四要素气体浓度采集模块4无线连接;
54.控制台1通过导线与升降控制模块2电性连接,升降控制模块2通过导线与云台模块3电性连接,四要素气体浓度采集模块4通过局域网与云台模块3 电性连接,四要素气体浓度采集模块4通过导线与温湿度传感器模块5电性连接,四要素气体浓度采集模块4通过导线与粉尘浓度测试模块6电性连接。
55.急停模块10与升降控制模块2通过导线电性连接,升降故障检测模块13 通过导线与升降控制模块2电性连接,对讲模块11通过导线与传输模块14 电性连接,播报模块12通过导线与传输模块14电性连接。
56.测距传感模块8通过导线与传输模块14电性连接,局放传感模块9通过导线与传输模块14电性连接,传输模块14通过局域网与后台数据处理模块 15无线连接。
57.工作原理:在使用的过程中,首先通过控制台1对装置进行数值预设当预设完毕后本装置便可以开始正常的进行工作,在工作前,升降故障检测模块13,会对升降控制模块2进行检测,若是有硬件问题则需要回厂返修,并且此时升降控制模块2可以带动云台模块3进行升降,云台模块3在使用的过程中,会对周围环境较为昏暗的地方进行拍摄,查看环境是否异常,可见光拍摄模块302则对波长《380nm或者》760nm的不可见光进行拍摄,如果红外线拍摄模块301或者可见光拍摄模块302两个模块发生了异常直接将数据传输模块14处,并且温湿度传感器模块5会在巡检机器人正常使用的过程中,对空气中的温湿度进行分析,并且将分析结果和以往的分析结果进行比对,如果出现了异常,会将现场定位发送到有关部门,防止发生意外,而粉尘浓度测试模块6,粉尘浓度测试模块6在运行的过程中会对空气中的粉尘浓度进行检测,因为粉尘在空气中漂浮遇,如果浓度过高在遇到明火或者较为强烈的震动时,则会发生爆炸,如果粉尘的弄到超过预设值则会直接将具体的位置信息进行上报,由工作人员进行紧急处理,提高施工时的安全性,为施工人员的安全提供保障,并且上述的多个模块中温湿度传感器模块5、粉尘浓度测试模块6、红外线拍摄模块301、可见光拍摄模块302都会将数据传输到传输模块14处,然后有传输模块14将数据传输到后台数据处理模块15的位置,然后由后台数据处理模块15发出警报,后台的工作人员收到警报后向有关部门进行汇报,相关部门则对其进行紧急处理,本装置在正常的使用情况下临场的人员可以通过对讲模块11给后台的工作人员进行留言或者直接进行对话,而通话数据同样通过传输模块14到达后台数据处理模块15的位置,然后后台人员再将数据传回,通过传输模块14传输到播报模块12处中,实现在某些特殊地区根据相关规定无法使用手机但仍然可以和后台进行沟通的目的,并且红外线拍摄模块301和可见光拍摄模块302在进行工作的过程中如果发现异常情况,急停模块10则会会对升降控制模块2发出指令,使升降装置停留在发现异常的高度,对其进行详细拍摄,防止有意外情况发生,而测距传感模块8、局放传感模块9和角度调节模块7是配合使用的,由测距传感模块8 测试处装置与测距传感模块8的具体距离,装置移动到合适的位置后,通过角度调节模块7调整角度,使局放传感模块9通过采集电线上流动的高频脉冲电流信号,通过对信号高频分量分析,可确定电线是否有放电,及放电
的严重程度,若有放电情况则会将位置信息传输,由工作人员进行维修,提高工作人员工作时的安全性。
58.本发明的各部分可以用硬件、软件、固件或他们的组合来实现,在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现,例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列 (fpga)等。
59.以上的仅是本发明的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。