1.本实用新型涉及焊接设备技术领域,特别涉及一种新型工业风扇网罩自动焊机。
背景技术:
2.专利2018203706227公开了一种风扇网罩自动焊接设备,绕线工作台与焊机连接的一端端部上安装有绕线模具架定位装置,绕线模具架定位装置位于绕线模具架的下方,工作时第一绕线模具通过绕线模具架转动到第二绕线模具工位时,绕线模具架通过绕线模具架定位装置进行定位,可避免绕线模具架受转动惯性作用出现转动位置出现偏差的问题;同时在焊接时,可通过第三升降气缸的活塞杆动作将绕线模具定位套顶到绕线模具的绕线模具转轴下端的安装轴端内,实现对绕线模具进行定位固定,避免绕线模具绕其中心轴转动,导致焊接时出现错位偏差,影响焊接质量。
3.通过该技术方案可知,现有的风扇网罩自动焊接设备通常会设置多组上焊接电极与至少一个下焊接电极放电配合,以对定位模具上的风扇网罩进行焊接工序,采用这样的设计,造成焊接设备的生产成本过高,从而增加产品的生产成本。
4.本实用新型即是针对现有技术的不足而研究提出。
技术实现要素:
5.针对上述提到的现有技术中的风扇网罩自动焊接设备通常设置多组上焊接电极,造成焊接设备的生产成本过高的技术问题。
6.本实用新型解决其技术问题采用的技术方案是:
7.一种新型工业风扇网罩自动焊机,包括焊接主体,所述焊接主体上设有用于装配风扇网罩的定位模具、用于对风扇网罩进行焊接的焊接结构、及用于驱动定位模具旋转以调整风扇网罩焊接位置的旋转机构,所述焊接结构包括位于风扇网罩外侧的上焊接电极以及位于风扇网罩内侧的下焊接电极,所述焊接主体上设有用于驱动下焊接电极靠近或远离风扇网罩的第一驱动组件、及用于驱动上焊接电极靠近或远离风扇网罩的第二驱动组件,所述焊接主体上还设有用于驱动第二驱动组件运动,以带动上焊接电极沿风扇网罩的径向方向往复运动的第三驱动组件。
8.为了确保第三驱动组件能够正常运行,所述第三驱动组件包括设于焊接主体上的滑动导轨,所述滑动导轨上滑动连接有一滑动座,所述第二驱动组件设于滑动座上,所述焊接主体上设有用于驱动滑动座在滑动导轨上滑动的第三驱动器。
9.为了确保第三驱动器能够稳定的驱动滑动座在滑动导轨上滑动,所述第三驱动器的输出端上设有丝杆,所述丝杆与滑动座螺纹连接。
10.为了确保第二驱动组件能够正常运行,所述第二驱动组件为固设于滑动座上的第二驱动器,所述上焊接电极设于第二驱动器的输出端上。
11.为了增加新型工业风扇网罩自动焊机对风扇网罩的焊接范围,所述焊接主体上还设有用于对风扇网罩的外侧面进行焊接的上弧面焊接电极、及用于驱动上弧面焊接电极靠
近或远离风扇网罩的第四驱动组件,所述下焊接电极包括与上焊接电极配合的水平段、以及与上弧面焊接电极配合的弧形段。
12.为了确保旋转机构能够正常运行,所述旋转机构包括固设于焊接主体上的旋转驱动器以及设于旋转驱动器输出端上的旋转转轴,所述定位模具上设有与旋转转轴相对应的安装轴端。
13.为了确保第一驱动组件能够正常运行,所述第一驱动组件包括设于焊接主体上的固定座,所述固定座上设有两个间隔设置的固定部,两个所述的固定部之间设有滑动块,每一所述的固定部上均设有滑槽,所述滑动块的两侧均滑动连接于对应的滑槽内,所述滑动块上设有用于装配下焊接电极的装配座,所述焊接主体上设有与装配座连接的第一驱动器,所述第一驱动器用于驱动装配座运动,以带动滑动块在滑槽上滑动。
14.为了使第一驱动组件的结构更加紧凑,所述滑动块上设有用于避让第一驱动器的避让孔。
15.为了提高下焊接电极焊接时的安全性,所述焊接主体上还设有用于防止下焊接电极在进行焊接工序时发生晃动的伸缩固定部件,所述伸缩固定部件包括设于焊接主体上的伸缩驱动器,所述伸缩驱动器的输出端上设有固定组件。
16.为了确保伸缩固定部件能够正常运行,所述固定组件包括设于伸缩驱动器输出端上的固定板以及设于固定板上的固定垫片,所述固定座靠近伸缩驱动器的一端上设有与固定垫片相对应的装配块,所述装配块上设有装配孔,所述固定垫片的一端滑动设于装配孔内。
17.本实用新型的有益效果是:
18.本实用新型的一种新型工业风扇网罩自动焊机,包括焊接主体,在焊接主体上设有定位模具、焊接结构以及旋转机构,焊接结构包括数量为一组的上焊接电极和数量为一组的下焊接电极,在自动焊机对风扇网罩进行焊接工序时,首先将网罩装配在定位模具上,然后旋转机构驱动定位模具旋转至网罩上所需焊接的位置,然后第一驱动组件驱动下焊接电极移动至其顶面与网罩的内侧面相近或相抵,然后第二驱动组件驱动上焊接电极移动至其顶面与网罩的外侧面相近或相抵,通过上焊接电极和下焊接电极靠近,使两者之间产生电弧,从而对两者之间的网罩进行焊接,完成一处焊接后,第二驱动组件驱动上焊接电极远离网罩,然后第三驱动组件驱动上焊接电极沿网罩的径向方向运动,带动上焊接电极移动至下一焊接部位,然后第二驱动组件驱动上焊接电极靠近网罩,进行再一次的焊接,当完成此处的焊接工序时,第一驱动组件驱动下焊接电极远离网罩,第二驱动组件驱动上焊接电极远离网罩,第三驱动组件驱动上焊接电极复位至初始位置,然后旋转机构驱动定位模具继续转动,以调整网罩转动至指定位置,进行下一轮的焊接工序;采用这样的设计,使得自动焊机通过设置一组第三驱动组件,然后与一组上焊接电极和一组第二驱动组件配合,即可完成对网罩的焊接工序,比起采用多组上焊接电极和第二驱动组件的设计,能够有效降低焊接设备的生产成本,从而降低产品的生产成本。
19.下面将结合附图和具体实施方式对本实用新型做进一步说明。
附图说明
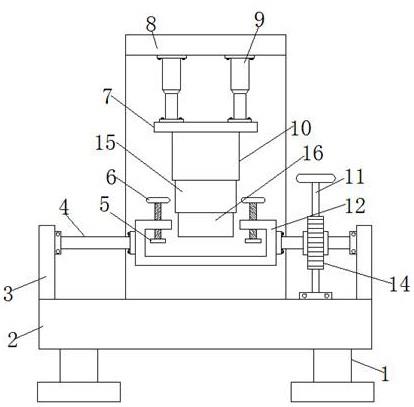
20.图1为本实用新型的结构示意图之一;
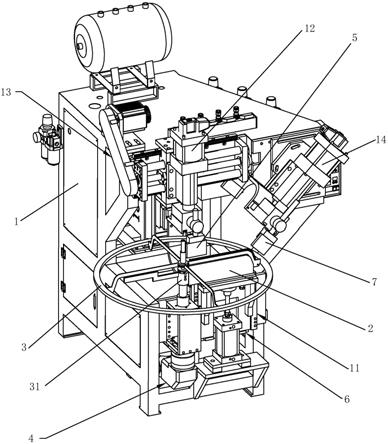
21.图2为本实用新型的结构示意图之二;
22.图3为本实用新型的第三驱动组件、第二驱动组件和上焊接电极装配后的结构示意图之一;
23.图4为本实用新型的第三驱动组件、第二驱动组件和上焊接电极装配后的结构示意图之二;
24.图5为本实用新型的旋转机构和定位模具装配后的结构示意图;
25.图6为本实用新型的第一驱动组件、下焊接电极和伸缩固定部件装配后的结构示意图之一;
26.图7为本实用新型的第一驱动组件、下焊接电极和伸缩固定部件装配后的结构示意图之二;
27.图8为本实用新型的第一驱动组件、下焊接电极和伸缩固定部件装配后的分解示意图之一;
28.图9为本实用新型的第一驱动组件、下焊接电极和伸缩固定部件装配后的分解示意图之一。
具体实施方式
29.下面结合附图对本实用新型的实施方式作详细说明。
30.如图1至图2所示,本实施例的一种新型工业风扇网罩自动焊机,包括焊接主体1,所述焊接主体1上设有用于装配风扇网罩的定位模具3、用于对风扇网罩进行焊接的焊接结构、及用于驱动定位模具3旋转以调整风扇网罩焊接位置的旋转机构4,所述焊接结构包括位于风扇网罩外侧的上焊接电极5以及位于风扇网罩内侧的下焊接电极2,所述焊接主体1上设有用于驱动下焊接电极2靠近或远离风扇网罩的第一驱动组件11、及用于驱动上焊接电极5靠近或远离风扇网罩的第二驱动组件12,所述焊接主体1上还设有用于驱动第二驱动组件12 运动,以带动上焊接电极5沿风扇网罩的径向方向往复运动的第三驱动组件13;
31.本实用新型的一种新型工业风扇网罩自动焊机,包括焊接主体,在焊接主体上设有定位模具、焊接结构以及旋转机构,焊接结构包括数量为一组的上焊接电极和数量为一组的下焊接电极,在自动焊机对风扇网罩进行焊接工序时,首先将网罩装配在定位模具上,然后旋转机构驱动定位模具旋转至网罩上所需焊接的位置,然后第一驱动组件驱动下焊接电极移动至其顶面与网罩的内侧面相近或相抵,然后第二驱动组件驱动上焊接电极移动至其顶面与网罩的外侧面相近或相抵,通过上焊接电极和下焊接电极靠近,使两者之间产生电弧,从而对两者之间的网罩进行焊接,完成一处焊接后,第二驱动组件驱动上焊接电极远离网罩,然后第三驱动组件驱动上焊接电极沿网罩的径向方向运动,带动上焊接电极移动至下一焊接部位,然后第二驱动组件驱动上焊接电极靠近网罩,进行再一次的焊接,当完成此处的焊接工序时,第一驱动组件驱动下焊接电极远离网罩,第二驱动组件驱动上焊接电极远离网罩,第三驱动组件驱动上焊接电极复位至初始位置,然后旋转机构驱动定位模具继续转动,以调整网罩转动至指定位置,进行下一轮的焊接工序;采用这样的设计,使得自动焊机通过设置一组第三驱动组件,然后与一组上焊接电极和一组第二驱动组件配合,即可完成对网罩的焊接工序,比起采用多组上焊接电极和第二驱动组件的设计,能够有效降低焊接设备的生产成本,从而降低产品的生产成本。
32.如图3至图4所示,本实施例的第三驱动组件13包括设于焊接主体1上的滑动导轨131,所述滑动导轨131上滑动连接有一滑动座132,所述第二驱动组件12固设于滑动座132上,所述焊接主体1上设有第三驱动器133,所述第三驱动器133的输出端与滑动座132连接,在第三驱动器133的作用下,能够驱动滑动座132在滑动导轨131上沿风扇网罩的径向方向往复滑动。
33.如图3所示,本实施例的第三驱动器133的输出端上设有丝杆134,所述第三驱动器133能够驱动丝杆134周向转动,所述丝杆134与滑动座132螺纹连接,具体的,当所述第三驱动器133驱动丝杆134周向转动时,所述丝杆134 能够带动滑动座132在滑动导轨131上滑动,以带动第二驱动组件12沿风扇网罩的径向方向移动,传动方式简单可靠;丝杆传动方式具有结构简单、加工容易、成本低、传动轴向力大、可自锁、定位精度高的优点。
34.如图1至图4所示,本实施例的第二驱动组件12为固设于滑动座132上的第二驱动器,所述第二驱动器具有能够伸缩的输出端,所述上焊接电极5设于第二驱动器的输出端上,所述第二驱动器通过输出端的伸缩,以带动上焊接电极的焊接面靠近或远离风扇网罩的外侧面,具有结构简单,操作方便的优点。
35.如图1至图2所示,本实施例的焊接主体1上还设有用于对风扇网罩的外侧面进行焊接的上弧面焊接电极7、及用于驱动上弧面焊接电极7靠近或远离风扇网罩的第四驱动组件14,优选的,所述第四驱动组件14为固设于焊接主体1 上的第四驱动器,所述上弧面焊接电极7设于第四驱动器的输出端上,所述第四驱动器通过输出端的伸缩,以带动上弧面焊接电极7的焊接面靠近或远离风扇网罩的外侧面,所述上焊接电极5和上弧面焊接电极7沿风扇网罩的焊接外弧面呈弧形排列;
36.具体的,所述下焊接电极2包括与上焊接电极5配合的水平段、以及与上弧面焊接电极7配合的弧形段,所述上焊接电极5的焊接面与风扇网罩的顶部外侧面的弧度相近或相同,所述下焊接电极2水平段的焊接面与风扇网罩的顶部内侧面的弧度相近或相同,所述上弧面焊接电极7的焊接面与风扇网罩的侧面外侧面的弧度相近或相同,所述下焊接电极2弧形段的焊接面与风扇网罩的侧面内侧面的弧度相近或相同,采用这样的设计,使得上焊接电极5、下焊接电极2和上弧面焊接电极7能够更加贴近风扇网罩,且能够对整个风扇网罩进行全方位的焊接,保证焊接效果。
37.如图1、图2和图5所示,本实施例的旋转机构4包括固设于焊接主体1上的旋转驱动器41以及设于旋转驱动器41输出端上的旋转转轴42,所述定位模具3上设有与旋转转轴42相对应的安装轴端31;所述旋转驱动器41能够驱动旋转转轴42周向旋转,通过安装轴端31带动定位模具3转动,以调整风扇网罩的焊接位置,优选的,所述安装轴端31位于定位模具3的中心点处,所述定位模具的外轮廓呈圆形状,所述下焊接电极2的长度尺寸略小于定位模具3的半径尺寸,以确保上焊接电极和下焊接电极之间的焊接范围,提高焊接效果。
38.如图1、图2、图6至图9所示,本实施例的第一驱动组件11包括设于焊接主体1上的固定座111,所述固定座111上设有两个间隔设置的固定部112,两个所述的固定部112之间设有滑动块113,每一所述的固定部112上均设有滑槽1121,所述滑动块113的两侧均延伸至对应的滑槽1121内,且分别对应的滑槽1121的滑动连接,以使滑动块113能够通过与滑槽1121的的配合,在固定座 111上滑动,所述滑动块113上设有用于装配下焊接电极2的装配座114,所述焊接主体1上设有第一驱动器115,具体的,所述第一驱动器115具有能够伸缩的
输出端,所述第一驱动器115的输出端与装配座114远离下焊接电极2的侧面连接,所述第一驱动器115的输出端能够通过装配座114,以驱动滑动块113 在固定座111上滑动,以此带动下焊接电极2靠近或远离风扇网罩。
39.如图1、图2、图6至图9所示,本实施例的滑动块113上设有用于避让第一驱动器115的避让孔1131,以缩小第一驱动组件的体积,使工业风扇网罩自动焊机的结构更加紧凑,进一步缩小自动焊机的体积,减少装配占用的空间。
40.如图1、图2、图6至图9所示,本实施例的焊接主体1上还设有用于防止下焊接电极2在进行焊接工序时发生晃动的伸缩固定部件,所述伸缩固定部件包括设于焊接主体1上的伸缩驱动器8,所述伸缩驱动器8具有能够伸缩的输出端,所述伸缩驱动器8的输出端上设有固定组件6,当第一驱动组件驱动所述下焊接电极2的外侧面与风扇网罩的内侧面相抵时,所述伸缩驱动器8能够驱动固定组件6移动至滑动块113的下方,以使滑动块113锁定在固定组件6上,从而防止上焊接电极与下焊接电极配合时所产生的作用力使滑动块往远离定位模具的方向移动,避免下焊接电极上下晃动,确保对风扇网罩的焊接效果。
41.如图1、图2、图6至图9所示,本实施例的固定组件6包括设于伸缩驱动器8输出端上的固定板61以及设于固定板61上的固定垫片62,优选的,所述固定垫片62的数量为两块,两块所述的固定垫片62间隔设置在固定板61上,且分别位于第一驱动器115的两侧;
42.具体的,所述固定座111靠近伸缩驱动器8的一端上设有与固定垫片62相对应的装配块63,每一所述装配块63上设有装配孔64,每一所述的固定垫片 62的一端滑动设于对应的装配孔64内,在初始状态时,每一所述的固定垫片 62的一端位于装配孔64内的状态;
43.具体的,当第一驱动组件驱动所述下焊接电极2的外侧面与风扇网罩的内侧面相抵时,所述伸缩驱动器8驱动固定板61上的固定垫片62伸出装配孔64,使固定垫片62位于滑动块113底部的下方,且二者贴近或相抵,此时固定垫片 62能够抵住滑动块113,以使滑动块113锁定在固定座111上;
44.当所述固定板61在伸缩驱动器8的作用下往远离装配块63方向运动时,所述固定垫片62缩回装配孔64内,且固定垫片62的顶面不再与滑动块113的底部贴近或相抵,以使滑动块113在固定座111上处于解锁状态,所述下焊接电极2能够往远离风扇网罩的方向移动,采用这样的设计,能够提高自动焊机的安全性能以及焊接效果。
45.优选的,所述第一驱动器、第二驱动器、第四驱动器和伸缩驱动器均可为气缸,也均可为伺服电机,根据用户的实际需求选择以上驱动器的类型。
46.本实用新型的一种新型工业风扇网罩自动焊机的工作原理:
47.当进行焊接工序时,旋转驱动器通过旋转转轴驱动定位模具转动至所需焊接的位置,所述第一驱动器驱动滑动块在固定座上往靠近风扇网罩的方向移动,从而带动装配座上的下焊接电极靠近风扇网罩,使下焊接电极的焊接面与风扇网罩的内侧面相近或相抵;
48.所述伸缩驱动器驱动固定板上的固定垫片伸出装配孔外,使固定垫片位于滑动块底部的下方,且二者贴近或相抵,具体为固定垫片的顶面抵住滑动块的底部;
49.所述第二驱动器带动上焊接电极靠近风扇网罩,以使上焊接电极的焊接面与风扇网罩的外侧面相近或相抵,此时上焊接电极与下焊接电极的水平段配合放电,从而对风扇网罩进行焊接工序;
50.完成焊接后,所述第二驱动器带动上焊接电极远离风扇网罩,然后第三驱动器驱
动丝杆周向转动,带动滑动座在滑动导轨上沿风扇网罩的径向方向滑动,从而带动第二驱动器上的上焊接电极移动至下一焊接位置,然后对风扇网罩进行焊接,直至第二驱动器上的上焊接电极移动至最接近上弧面焊接电极的位置时,所述上焊接电极对网罩焊接完成后,所述第四驱动器驱动上弧面焊接电极靠近风扇网罩,此时上弧面焊接电极与下焊接电极的弧形段配合放电,从而对风扇网罩的弧形外侧面进行焊接工序;
51.完成焊接后,所述第四驱动器驱动上弧面焊接电极远离风扇网罩,复位至初始位置,所述第二驱动器驱动上焊接电极远离风扇网罩,且第三驱动器驱动丝杆反向周向转动,以带动上焊接电极复位至初始位置,所述伸缩驱动器驱动固定板往远离固定座方向移动,以使固定垫片缩回装配孔内,所述第一驱动器能够驱动滑动块在固定座往远离风扇网罩的方向移动,以带动下焊接电极远离风扇网罩,复位至初始位置,然后通过旋转驱动器驱动定位模具转动至下一焊接位置,从而开始下一轮焊接工作。
52.上述仅以实施例来进一步说明本实用新型的技术内容,以便于读者更容易理解,但不代表本实用新型的实施方式仅限于此,任何依本实用新型所做的技术延伸或再创造,均受本实用新型的保护。本实用新型的保护范围以权利要求书为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。