1.本技术涉及控制技术的领域,尤其是涉及一种取货控制系统。
背景技术:
2.在仓库设计时,货架之间的距离越小,货架数量越多,仓库的存储量越大;但货架数量过多,货架间距过小,则需要在取货时移动货架,便于运货车进入取货。agv(自动导引车)在物流自动化领域用于对被运载物进行自动化运输。将agv运用到上述仓库时,能够取代人工,节约取货成本。
3.但利用agv在进行取货时,一方面agv需要自动运行的前提是能够辨识自身在工作空间中的位置坐标,相关技术中的手段为:地面埋设电缆、二维码,布置反光标签等,现有技术主要是利用车载传感器进行agv的位置辨识,传感器数量需要与工作场所内的agv数量相同,成本非常高;同时,因为agv本体需要进行复杂的位置解算,对车载处理器有很高的要求,不利于将原先的非自动化车辆进行控制或改造成自动化车辆。同时,在agv取货时,也可能会发生货物丢失的情况。
4.针对上述中的相关技术,发明人认为存在有agv布置成本高的缺陷。
技术实现要素:
5.为了在降低agv布置成本的基础上完成取货工作,本技术提供一种取货控制系统。
6.第一方面,本技术提供一种取货控制系统,采用如下的技术方案:一种取货控制系统,该系统包括:第一摄像模块,用于获取朝向室内的图像信息;第二摄像模块,设置在运货车上,用于获取运货车取货方向的图像信息;第一获取模块,用于获取货物位置信息和取货任务;服务器,用于根据所述货物位置信息,确定货架控制指令;根据所述朝向室内的图像信息、取货方向的图像信息和取货任务,确定运货车控制指令;电控货架,用于接收所述货架控制指令开启或归位;运货车控制器,用于接收所述运货车控制指令,控制运货车行进和取货;所述服务器分别电连接第一摄像模块、第二摄像模块、第一获取模块、电控货架和运货车控制器。
7.通过采用上述技术方案,通过第一获取模块获取货物位置信息,服务器根据货物位置信息确定货架控制指令;电控货架接收货架控制指令开启或归位;通过第一摄像模块和第二摄像模块分别采集室内的图像信息和运货车取货方向的图像信息,第一获取模块获取取货任务,服务器根据朝向室内的图像信息、取货方向的图像信息和取货任务确定运货车控制指令,运货车控制器接收运货车控制指令,控制运货车行进和取货,从而实现对取货任务的控制。
8.可选的,所述服务器被配置为:
根据所述货物位置信息,确定货物的货架号;根据所述货架号,依次输出编号在前的货架开启指令。
9.通过采用上述技术方案,服务器根据货物位置信息,先确定货架号,根据货架号,依次输出编号在前的货架开启指令,电控货架接收开启指令,依次开启货架,直至到达指定货架,当取货完成后,服务器根据第一摄像模块采集朝向室内的图像信息,确定取货完毕,再依次输出货架归位信号,电控货架接收归位信号,依次归位,从而实现对货架的开启和归位。
10.可选的,所述服务器被进一步配置为:根据所述朝向室内的图像信息,确定运货车的位置信息;根据所述运货车的位置信息和货物位置信息,确定运货车的行进指令;根据所述取货方向的图像信息和取货任务,确定运货车的取货指令。
11.通过采用上述技术方案,服务器根据朝向室内的图像信息,识别运货车及运货车的位置信息,根据运货车的位置信息和货物位置信息,确定运货车的行进指令;运货车控制器接收行进指令,行进到指定取货位置;此时第二摄像模块对准货架,采集货架上的图像信息,服务器接收图像信息,识别目标货物并根据取货任务输出取货指令;运货车控制器接收取货指令,完成取货任务。
12.可选的,所述服务器被进一步配置为:根据所述货物位置信息,确定移动后货架之间通道的空间坐标;根据所述运货车的位置信息,确定运货车行驶到所述通道的路径;根据所述路径,确定运货车的行进指令。
13.通过采用上述技术方案,服务器根据货物位置信息和货架移动的预设距离,确定移动后货架之间通道的空间坐标,在根据运货车的位置信息,规划运货车行驶到通道的路径,最后再根据规划出的路径,输出运货车的行进指令;运货车控制器接收行进指令,控制运货车行进到通道内部的指定位置取货。
14.可选的,所述服务器被进一步配置为:根据所述取货方向的图像信息,得到货物的具体位置;根据所述货物的具体位置和取货任务,确定取货指令。
15.通过采用上述技术方案,第二摄像模块采集运货车取货方向的图像信息,服务器根据取货方向的图像信息,得到货物在货架上的具体位置,再根据取货任务,输出取货指令;运货车控制器控制运货车在货架上取货。
16.可选的,还包括第二获取模块,所述第二获取模块被配置为:获取货架开启时间、归位时间和取货时的图像信息。
17.通过采用上述技术方案,通过记录货架开启时间、归位时间和取货时的图像信息,实现对取货过程的可视化监控,有助于监测货物流动情况。
18.可选的,所述第一摄像模块包括摄像机和电动云台,所述摄像机设置在电动云台上,所述电动云台电连接服务器。
19.通过采用上述技术方案,通过电控云台,能够调节摄像机的拍摄方向。
20.可选的,所述服务器还被进一步配置为:根据所述室内的图像信息,追踪运货车的运行轨迹,具体步骤为:
获取摄像机的位置信息;获取图像信息中的运货车的位置信息和运动方向;根据所述运货车的位置信息、运动方向和摄像机的位置信息,计算电动云台的转动角度和转动方向。
21.通过采用上述技术方案,根据摄像机的位置,运货车的运动方向和位置信息,计算电动云台的转动角度和转动方向,使摄像机总是朝向运货车的方向,从而使对运货车位置的定位更加准确,同时能够对运货过程实时监控。
22.可选的,所述电控货架包括货架控制器、电机、螺杆、货架本体和滚轮,所述货架控制器电连接电机,所述螺杆设置在货架本体上方,螺杆的两端与墙体固定连接;多个所述电机分别设置在每一货架本体顶部,所述电机的转轴上设有齿轮,所述齿轮与螺杆啮合;所述滚轮设置在货架本体的底部。
23.通过采用上述技术方案,服务器通过货架控制器,控制电机转动,电机转动带动齿轮在螺杆上位移,从而带动与电机连接的货架本体运动;滚轮的设置用于实现货架本体底部的运动。
24.综上所述,本技术包括以下至少一种有益技术效果:1.通过第一获取模块获取货物位置信息,服务器根据货物位置信息确定货架控制指令;电控货架接收货架控制指令开启或归位;通过第一摄像模块和第二摄像模块分别采集室内的图像信息和运货车取货方向的图像信息,第一获取模块获取取货任务,服务器根据朝向室内的图像信息、取货方向的图像信息和取货任务确定运货车控制指令,运货车控制器接收运货车控制指令,控制运货车行进和取货,从而实现对取货任务的控制;2.服务器根据货物位置信息和货架移动的预设距离,确定移动后货架之间通道的空间坐标,在根据运货车的位置信息,规划运货车行驶到通道的路径,最后再根据规划出的路径,输出运货车的行进指令;运货车控制器接收行进指令,控制运货车行进到通道内部的指定位置取货,实现对运货车的控制;3.服务器根据摄像机的位置,运货车的运动方向和位置信息,计算电动云台的转动角度和转动方向,使摄像机总是朝向运货车的方向,从而使对运货车位置的定位更加准确,同时能够对运货过程实时监控。
附图说明
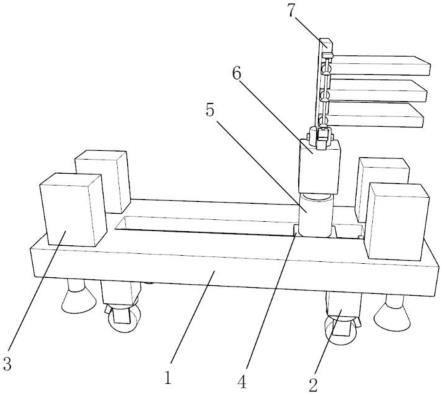
25.图1是本技术提供的取货控制系统的应用场景图。
26.图2是本技术提供的取货控制系统的结构框图。
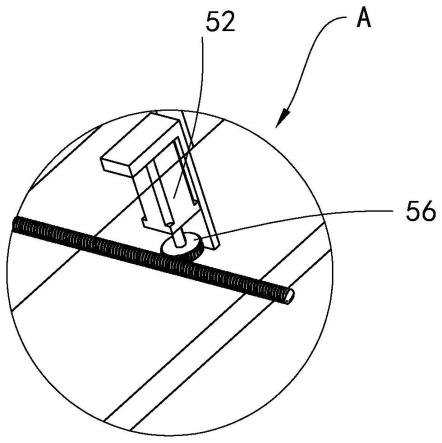
27.图3是图1中a部分的放大图。
28.图4是本技术提供的取货控制系统的流程图。
29.附图标记说明:1、第一摄像模块;2、第二摄像模块;3、第一获取模块;4、服务器;5、电控货架;51、货架控制器;52、电机;53、螺杆;54、货架本体;55、滚轮;56、齿轮;6、运货车控制器;7、第二获取模块;8、电动云台。
具体实施方式
30.以下结合附图1-4对本技术做进一步详细说明。
31.在仓库设计时,货架之间的距离越小,货架数量越多,仓库的存储量越大;但货架数量过多,货架间距过小,则需要在取货时移动货架,便于运货车进入取货。
32.本技术实施例公开一种取货控制系统,参照图1和图2,一种取货控制系统包括:第一摄像模块1、第二摄像模块2、第一获取模块3、服务器4、电控货架5和运货车控制器6;服务器4分别电连接第一摄像模块1、第二摄像模块2、第一获取模块3、电控货架5和运货车控制器6。第一摄像模块1,用于获取朝向室内的图像信息;第二摄像模块2,设置在运货车上,用于获取运货车取货方向的图像信息;第一获取模块3,用于获取货物位置信息和取货任务;服务器4,用于根据货物位置信息,确定货架控制指令;根据朝向室内的图像信息、取货方向的图像信息和取货任务,确定运货车控制指令;电控货架5,用于接收货架控制指令开启或归位;运货车控制器6,用于接收运货车控制指令,控制运货车行进和取货。
33.本技术实施例中,第一摄像模块1为摄像机和电动云台8,其中摄像机为带有测距功能的摄像机;第二摄像模块2为设置在运货车上的摄像头;第一获取模块3为从服务器4调取信息的查询软件或外接设备;运货车控制器6和第二摄像模块2连接有无线通信模块,并通过无线通信模块与服务器4通信连接。
34.参照图3,其中,电控货架5包括货架控制器51、电机52、螺杆53、货架本体54和滚轮55,货架控制器51电连接电机52,螺杆53设置在货架本体54上方,螺杆53的两端与墙体固定连接;多个电机52分别设置在每一货架本体54顶部,电机52的转轴上设有齿轮56,齿轮56与螺杆53啮合;滚轮55设置在货架本体54的底部。第一摄像模块1包括摄像机和电动云台8,电动云台8电连接控制器。工作时,服务器4通过货架控制器51,控制电机52转动,电机52转动带动齿轮56在螺杆53上位移,从而带动与电机52连接的货架本体54运动;滚轮55的设置用于实现货架本体54底部的运动。
35.参照图4,一种取货控制系统的服务器4的处理流程如下:s101:获取朝向室内的图像信息、取货方向的图像信息、货物位置信息和取货任务。
36.s102:根据货物位置信息,确定货架控制指令。
37.具体的,根据货物位置信息,确定货物的货架号;根据货架号,依次输出编号在前的货架开启指令。
38.在一个示例中:货物所在的货架号为四和五,按照顺序,需要依次打开编号为一、二、三、四的货架,因此服务器4根据货物位置,依次输出在前的货架开启指令,电控货架5依次接收在前的货架开启指令,按顺序开启编号为一、二、三、四的货架,在编号为四和五的货架之间留出供运货车驶入的通道。
39.s103:根据朝向室内的图像信息、取货方向的图像信息和取货任务,确定运货车控制指令。
40.具体的,根据朝向室内的图像信息,确定运货车的位置信息;根据运货车的位置信息和货物位置信息,确定运货车的行进指令;根据取货方向的图像信息和取货任务,确定运货车的取货指令。
41.其中,根据运货车的位置信息和货物位置信息,确定运货车的行进指令包括:根据货物位置信息,确定移动后货架之间通道的空间坐标;根据运货车的位置信息,确定运货车行驶到所述通道的路径;根据路径,确定运货车的行进指令。
42.其中,根据取货方向的图像信息和取货任务,确定运货车的取货指令,包括:根据取货方向的图像信息,得到货物的具体位置;根据货物的具体位置和取货任务,确定取货指令。
43.在一个示例中,货物所在的货架号为四和五,每一货架开启时移动的距离是固定的,根据货架五的位置,可以得知货架编号四和五的货架之间的通道的位置;通过第一摄像模块1,可以实现对运货车在室内的定位;其中多个摄像机配合即可实现对运货车的定位,具体实现方式为通过多个摄像机对运货车和货架距离的识别,形成三维的空间定位;服务器4根据通道的位置和运货车的位置,规划出运货车行驶到通道内的路径,根据路径输出运货车的行进指令;运货车控制器6接收行进指令,驶入货架四和五之间的通道,到达指定的取货位置。到达取货位置后,第二摄像模块2拍摄货架上的货物的图像信息并发送至服务器4,服务器4根据取货方向的图像信息,识别货物的位置和数量,在从数据库中调取取货任务,核对货物种类和数量,下达取货指令。运货车控制器6接收取货指令控制运货车完成取货。
44.s104:获取货架开启时间、归位时间和取货时的图像信息。
45.在取货、运货的过程中,可能会发生货物丢失、取货数量不符的情况,因此还设置有第二获取模块7,第二获取模块7用于从服务器4中获取货架开启时间、归位时间和取货时的图像信息。
46.另一方面,为了提高对运货车定位的精确性,本技术实施例还包括根据室内的图像信息,追踪运货车的运行轨迹。
47.具体的,获取摄像机的位置信息;获取图像信息中的运货车的位置信息和运动方向;根据运货车的位置信息、运动方向和摄像机的位置信息,计算电动云台8的转动角度和转动方向。
48.根据摄像机的位置,运货车的运动方向和位置信息,计算电动云台8的转动角度和转动方向,使摄像机总是朝向运货车的方向,从而使对运货车位置的定位更加准确,同时能够对运货过程实时监控。
49.在一个示例中,获取多台摄像机得到的运货车距离信息,根据三个以上的距离信息,能够准确的得到运货车在空间内的位置信息。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。