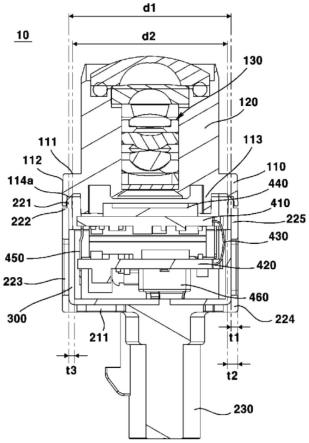
1.实施方式涉及相机模块和包括该相机模块的光学设备。
背景技术:
::2.难以将现有的一般相机模块中使用的音圈马达(vcm)的技术应用于超小型、低功率相机模块,并且因此已经积极进行了与之相关的研究。3.对电子产品比如配备有相机的智能电话和移动电话的需求和生产已经增加。用于移动电话的相机朝着高分辨率和小型化发展。因此,致动器也朝着小型化、大口径化和多功能化发展。为了实现用于移动电话的高分辨率相机,需要改进用于移动电话的相机的性能及其附加功能,例如自动对焦、手抖动校正和变焦。技术实现要素:4.技术问题5.实施方式提供了一种相机模块和包括该相机模块的光学设备,该相机模块和包括该相机模块的光学设备能够执行准确的ois反馈操作,并且因此确保ois操作的可靠性。6.技术方案7.在实施方式中,相机模块包括固定部分和可移动部分,该固定部分包括磁体,该可移动部分包括:第一电路板,该第一电路板与固定部分间隔开;位置传感器,该位置传感器设置在第一电路板上;线圈,该线圈设置成面向磁体;以及间隔件,该间隔件设置在第一电路板与线圈之间,其中,间隔件具有孔,并且位置传感器设置成使得位置传感器的至少一部分设置在间隔件的孔中并在光轴方向上磁体重叠。8.间隔件的孔可以在光轴方向上与线圈的至少一部分重叠。位置传感器可以在光轴方向上不与线圈重叠。线圈可以具有形成在其中央中的孔,并且间隔件的孔可以在光轴方向上与线圈的孔重叠。位置传感器可以在光轴方向上与线圈的孔和间隔件的孔两者重叠。9.可以在磁体与位置传感器之间限定有空间。相机模块还可以包括弹性支承构件,该弹性支承构件联接至固定部分和可移动部分两者。固定部分可以包括第二电路板,并且弹性支承构件可以将第一电路板导电地连接至第二电路板。线圈可以联接至间隔件并且可以导电地连接至第一电路板。10.在另一实施方式中,相机模块包括:透镜;图像传感器,该图像传感器设置在与透镜对应的位置处;驱动单元,该驱动单元构造成使图像传感器移动;电路板,该电路板设置成与透镜间隔开;位置传感器,该位置传感器设置在电路板上;以及间隔件,该间隔件设置在电路板上,其中,驱动单元包括磁体和面向该磁体的线圈,其中,间隔件在电路板与线圈之间设置成使线圈与位置传感器间隔开,并且其中,图像传感器沿垂直于光轴方向的方向移动。11.在另一实施方式中,相机模块包括固定部分和可移动部分,该固定部分包括磁体,该可移动部分包括:第一电路板,该第一电路板设置成与固定部分间隔开;保持器,该保持器设置在第一电路板上;线圈,该线圈设置在保持器上以面向磁体;以及位置传感器,该位置传感器设置在第一电路板上以面向磁体;以及支承构件,该支承构件联接至固定部分和可移动部分两者,其中,可移动部分通过磁体与该线圈之间的相互作用沿垂直于光轴方向的方向移动,并且线圈在垂直于光轴方向的方向上不与线圈重叠。12.位置传感器可以安装在第一电路板上,并且可以在光轴方向上不与线圈重叠。固定部分可以包括第二电路板,该第二电路板设置成与第一电路板间隔开。支承构件可以在其一个端部处联接至第二电路板,并且在其另一个端部处联接至第一电路板。支承构件可以将第一电路板连接至第二电路板。13.线圈可以具有形成在其中央中的孔,并且位置传感器可以设置在间隔件的孔下方,并且可以在光轴方向上与间隔件的孔重叠。14.保持器可以在其中具有通孔,该通孔在光轴方向上与位置传感器对应,并且位置传感器可以设置在保持器中的通孔中。保持器可以包括从其上表面突出的联接突出部,并且线圈可以联接至该联接突出部。15.可移动部分可以包括安装在第一电路板上的图像传感器。第一电路板的四个拐角可以设置有从第一电路板的侧向侧表面突出的突起,并且保持器的下表面可以具有坐置凹槽,第一电路板的突起设置在该坐置凹槽中。16.线圈可以包括分别设置在保持器的第一拐角至第四拐角处的第一线圈单元至第四线圈单元,磁体可以包括与第一线圈单元对应的第一磁体、与第二线圈单元对应的第二磁体、与第三线圈单元对应的第三磁体以及与第四线圈单元对应的第四磁体,并且位置传感器可以包括设置在第一线圈单元下方的第一传感器、设置在第二线圈单元下方下的第二传感器以及设置在第三线圈单元下方的第三传感器。第一线圈单元至第四线圈单元可以被单独地激活。17.第一线圈单元至第三线圈单元可以被单独地激活,并且第四线圈单元可以与第一线圈单元至第三线圈单元中的一者一起被激活。18.在又一实施方式中,相机模块包括固定部分和可移动部分,该固定部分包括磁体,该可移动部分包括:第一电路板,该第一电路板设置成与固定部分间隔开;线圈,该线圈设置成面向磁体;保持器,该保持器设置在第一电路板与线圈之间;以及位置传感器,该位置传感器设置在第一电路板上以面向磁体,其中,线圈在其中具有第一孔,保持器在其中具有形成在与第一孔对应的位置处的第二孔,并且位置传感器的至少一部分设置在保持器中的第二孔中。19.有益效果20.如从以上描述中明显的,由于实施方式被构造成使得ois位置传感器设置成在垂直于光轴的方向上不与ois线圈单元重叠,因此可以减少由ois线圈单元的磁场引起的对ois位置传感器的输出的影响、执行准确的ois反馈操作、并确保ois操作的可靠性。21.此外,由于实施方式消除了由从线圈产生的磁场对位置传感器的输出的影响,因此可以执行准确的ois反馈操作并确保ois操作的可靠性。附图说明22.图1是根据本发明的实施方式的相机模块的立体图;23.图2是图1中所示的相机模块的分解立体图;24.图3是图1中所示的相机模块的、从中移除了盖构件的组装立体图;25.图4是图2中所示的af(自动对焦)操作单元的分解立体图;26.图5是图4中所示的线圈架、感测磁体、平衡磁体、第一线圈、电路板、第一位置传感器和电容器的立体图;27.图6是线圈架、壳体、电路板和上弹性构件的立体图;28.图7是壳体、线圈架、下弹性构件、磁体和电路板的底部立体图;29.图8是图像传感器单元的立体图;30.图9是图像传感器单元的分解立体图;31.图10是图9中所示的第二电路板和壳体的立体图;32.图11是图9中所示的第二电路板、壳体和磁体的立体图;33.图12a是保持器、第二线圈、第一电路板、第二位置传感器、图像传感器、支承构件和连接弹性构件的分解立体图;34.图12b是图12a中所示的保持器、第二线圈、第一电路板、第二位置传感器、滤光器保持器和滤光器的立体图;35.图13a是图12a中所示的保持器的底部立体图;36.图13b是保持器和第一电路板的底视图;37.图14是保持器、图像传感器、第一电路板、支承构件和连接弹性构件的分解立体图;38.图15是保持器、第一电路板和连接弹性构件的底视图;39.图16是保持器、第一电路板、连接弹性构件和绝缘构件的底视图;40.图17是连接弹性构件的局部放大图;41.图18是一个连接弹簧和一个支承构件的底视图;42.图19a是图1中所示的相机模块的沿着线a-b截取的横截面图;43.图19b是图1中所示的相机模块的沿着线c-d截取的横截面图;44.图20是图1中所示的相机模块的沿着线i-j截取的横截面图;45.图21是图8中所示的图像传感器单元的沿着线e-f截取的横截面图;46.图22是图示了根据另一实施方式的连接弹性构件的视图;47.图23是根据本发明的另一实施方式的相机模块的分解立体图;48.图24是图示了根据实施方式的磁体、ois线圈单元、ois位置传感器、保持器和第一电路板的布置的视图;49.图25是图示了根据比较示例的磁体、ois线圈单元、ois位置传感器、第一电路板和保持器的布置的视图;50.图26是图示了关于输入至ois线圈单元的驱动信号和ois位置传感器的输出的频率响应特性的视图;51.图27是图示了关于输入至根据图24中所示的实施方式的ois线圈单元的驱动信号和ois位置传感器的输出的频率响应特性的视图;52.图28是根据实施方式的相机模块的立体图;53.图29是图28中所示的相机模块的分解立体图;54.图30是移除了盖构件的图28中所示的相机模块的组装立体图;55.图31是图29中所示的af操作单元的分解立体图;56.图32是图31中所示的线圈架、感测磁体、平衡磁体、第一线圈、电路板、第一位置传感器和电容器的立体图;57.图33是线圈架、壳体和电路板的立体图;58.图34是壳体、线圈架、下弹性构件、磁体和电路板的底部立体图;59.图35是图29中所示的图像传感器单元的立体图;60.图36是图35中所示的图像传感器单元的分解立体图;61.图37是第一电路板和壳体的立体图;62.图38是图36中所示的第一电路板、壳体和磁体的立体图;63.图39a是第二电路板、第二线圈、第二位置传感器、图像传感器、支承构件和保持器的分解立体图;64.图39b是图39a中所示的第三电路板、第二线圈和第二位置传感器的平面图;65.图40是图36中所示的第二电路板、图像传感器、支承构件、保持器和连接弹性构件的分解立体图;66.图41是图35中所示的图像传感器单元的、从中移除了底盖的底视图;67.图42是连接弹性构件的局部放大图;68.图43是图示了连接弹性构件的连接弹簧的视图;69.图44a是图28中所示的相机模块的沿着线a-b截取的横截面图;70.图44b是图28中所示的相机模块的沿着线c-d截取的横截面图;71.图45是图28中所示的相机模块的沿着线i-j截取的横截面图;72.图46是图35中所示的图像传感器单元的沿着线e-f截取的横截面图;73.图47是图35中所示的图像传感器的沿着线g-h截取的横截面图;74.图52是移除了底盖且被剖开的相机模块的立体图;75.图53图示了存储在存储器中的校正值的另一实施方式;76.图54是图示了图53中所示的设定校正值的方法的视图;77.图55是图示了根据另一实施方式的ois位置传感器的布置的视图;78.图56是图示了根据另一实施方式的控制器的视图;79.图57是图示了根据实施方式的控制器的操作的流程图;80.图58是图示了对ois位置传感器的输出进行校正的实施方式的表格;81.图59是图示了对ois位置传感器的输出进行校正的另一实施方式的表格;82.图60是图示了第一传感器的输出的代码值的视图、这些代码值与ois可移动部分在x轴方向上的位移相对应或相匹配;83.图61是图示了关于输入至ois线圈单元的驱动信号和ois位置传感器的输出的频率响应特性的视图;84.图62是图示了根据实施方式的光学设备的立体图;以及85.图63是图示了图62中所图示的光学设备的构型的视图。具体实施方式86.在下文中,将参照附图详细描述本发明的实施方式。87.本发明的技术思想可以以许多不同的形式实施,并且不应被解释为限于本文中阐述的以下实施方式。在不脱离本发明的技术精神和范围的情况下,实施方式的一个或更多个部件可以选择性地彼此组合或替换。88.除非另有特别限定,否则在本发明的实施方式中使用的术语(包括技术和科学术语)具有与本发明所属领域的普通技术人员通常理解的那些含义相同的含义。还将理解,常用术语,比如词典中定义的那些术语,应当被解释为具有与其在相关技术的上下文中的含义一致的含义。89.在本发明的实施方式中使用的术语仅是为了描述特定实施方式的目的,而并非意在限制本发明。如在本公开和所附权利要求中所使用的,除非上下文另有明确指示,否则单数形式也意在包括复数形式。短语“a、b和c中的至少一者(或一者或更多者)”可以解释为包括a、b、和c的所有组合中的一者或更多者。90.此外,在描述本发明的部件时,可以使用诸如“第一”、“第二”、“a”、“b”、“(a)”或“(b)”之类的术语。由于提供这些术语仅仅是为了将部件彼此区分,因此它们并不限制部件的性质、序列或顺序。91.应当理解,当元件被称为“连结”、“联接”或“连接”至另一元件时,该元件可以直接“连结”、“联接”或“连接”至另一元件,或者可以经由置于其之间的其他元件“连结”、“联接”和“连接”至另一元件。此外,将理解的是,当元件被称为形成在另一元件“上”或“下”时,该元件可以直接地位于另一元件“上”或“下”,或者可以间接地与另一元件相关地设置,其中,在该元件与所述另一元件之间设置有一个或更多个中间元件。另外,还将理解的是,在元件“上”或“下”可以指基于元件的向上方向或向下方向。92.在下文中,af操作单元可以替代性地被称为“透镜移动单元”、“vcm(音圈马达)”、“致动器”或“透镜移动设备”。在下文中,术语“线圈”可以与“线圈单元”互换使用,并且术语“弹性构件”可以与术语“弹性单元”或“弹簧”互换使用。93.在以下描述中,“端子”可以替代性地被称为“焊盘”、“电极”、“导电层”或“接合部分”。94.在下文中,“代码值”可以替代性地被称为“数据值”或“数字值”。95.在下文中,“相机模块”可以替代性地被称为“相机”、“成像设备”或“相机设备”。96.为便于描述,尽管使用成直角的坐标系(x,y,z)来描述根据实施方式的相机模块,但也可以使用一些其他坐标系描述透镜移动装置,并且实施方式不限于此。在各附图中,x轴方向和y轴方向指与光轴、即z轴垂直的方向。作为光轴oa的方向的z轴方向可以被称为“第一方向”,x轴方向可以被称为为“第二方向”,并且y轴方向可以被称为“第三方向”。97.根据本发明的实施方式的相机模块能够执行“自动对焦功能”。此处,“自动对焦功能”用于将对象的图像自动对焦在图像传感器表面上。98.另外,根据实施方式的相机模块可以执行“手抖动校正”的功能。此处,“手抖动校正”的功能可以用于防止捕获的图像的轮廓线由于在捕获静止图像时由用户的手的抖动而引起的振动而变得模糊。99.图1是根据本发明的实施方式的相机模块10的立体图。图2是图1中所示的相机模块10的分解立体图。图3是图1中所示的相机模块的、从中移除了盖构件300的组装立体图。图4是图2中所示的af操作单元100的分解立体图。图5是图4中所示的线圈架110、感测磁体180、平衡磁体185、第一线圈120、电路板190、第一位置传感器170和电容器195的立体图。图6是线圈架110、壳体140、电路板190和上弹性构件150的立体图。图7是壳体140、线圈架110、下弹性构件160、磁体130和电路板190的底部立体图。100.参照图1至图7,相机模块10可以包括af操作单元100和图像传感器单元350。101.相机模块10还可以包括盖构件300、透镜模块400、基座210和底盖219中的至少一者。盖构件300、基座210和底盖219可以限定外壳。102.af操作单元100可以联接至透镜模块400,并且可以使透镜模块400沿光轴oa的方向或平行于光轴的方向移动,以执行相机模块10的自动对焦功能。103.图像传感器单元350可以包括图像传感器810,并且可以使图像传感器810沿垂直于光轴的方向移动,或者可以使图像传感器810相对于光轴倾斜或旋转。图像传感器单元350可以执行手抖动校正的功能。104.例如,图像传感器810可以绕x轴、y轴和z轴中的至少一者进行旋转。105.例如,图像传感器810可以沿x轴方向、y轴方向和z轴方向中的至少一个方向移动。106.例如,图像传感器810可以相对于x轴、y轴和z轴中的至少一者倾斜。107.af操作单元100可以替代性地被称为“透镜移动单元”或“透镜移动装置”。替代性地,af操作单元100可以替代性地被称为“第一致动器”或“af操作驱动单元”。108.对于ois(光学图像稳定器)的运动,可以通过图像传感器单元350使图像传感器810而不是透镜模块400沿垂直于光轴的方向移动。109.图像传感器单元350可以替代性地被称为“图像传感器移动单元”或“图像传感器移位单元”、“传感器移动单元“或“传感器移位单元“。替代性地,图像传感器单元350可以替代性地被称为“第二致动器”或“ois驱动单元”。110.参照图4,af操作单元100可以包括线圈架110、第一线圈120、磁体130和壳体140。111.af操作单元100还可以包括上弹性构件150和下弹性构件160。112.af操作单元100可以包括第一位置传感器170、电路板190和用于af反馈操作的感测磁体180。af操作单元100还可以包括平衡磁体185和电容器195中的至少一者。113.线圈架110可以设置在壳体140中以便能够通过第一线圈120与磁体130之间的电磁相互作用而沿光轴方向oa或第一方向(例如z轴方向)移动。114.线圈架110可以具有孔,透镜模块400联接或安装至该孔。例如,线圈架110中的孔可以是沿光轴方向穿过线圈架110形成的通孔,并且可以具有圆形形状、椭圆形形状或多边形形状,但不限于此。115.透镜模块400可以包括至少一个透镜和/或透镜镜筒。116.例如,透镜模块400可以包括至少一个透镜和接纳至少一个透镜的透镜镜筒。然而,透镜模块的构型不限于透镜镜筒,并且透镜模块可以具有任何构型,只要该构型能够支承至少一个透镜即可。117.例如,透镜模块400可以与线圈架110螺纹接合。替代性地,可以使用例如粘合剂(未示出)将透镜模块400联接至线圈架110。已经穿过透镜模块400的光可以通过滤光器610辐射至图像传感器810。118.线圈架110可以包括设置在其外表面上的突起111。119.例如,尽管突起111可以在平行于与光轴oa垂直的线的方向上突出,但本公开内容不限于此。120.线圈架110的突起111可以对应于壳体140中的凹槽25a,并且可以设置在壳体140中的凹槽25a中,以便使线圈架110绕光轴的旋转最小化或防止线圈架110绕光轴的旋转超出预定范围。121.此外,突起111可以用作止挡件,该止挡件构造成响应于外部冲击等使线圈架110沿光轴方向(例如,沿从上弹性构件150朝向下弹性构件160的方向)在预定范围内移动。122.线圈架110可以具有形成在其上表面中以用于避免与上弹性构件150的第一框架连接器153发生空间干涉的第一避让凹槽112a。线圈架110可以具有形成在其下表面中以用于避免与下弹性构件160的第二框架连接器163发生空间干涉的第二避让凹槽112b。123.线圈架110可以包括第一联接器116a,第一联接器116a构造成联接并固定至上弹性构件150。例如,尽管线圈架110的第一联接器116a可以具有平坦的形状,但本公开内容不限于此。在另一实施方式中,线圈架110的第一联接器116a可以具有突出部或凹槽的形状。124.线圈架110可以包括第二联接器116b,第二联结器116b构造成联接并固定至下弹性构件160。例如,尽管第二联接器116b可以具有平坦的形状,但本公开内容不限于此。在另一实施方式中,第二联接器116b可以具有突出或凹槽的形状。125.参照图5,线圈架110的外表面可以具有形成在其中的凹槽,第一线圈120坐置、配装或设置在该凹槽中。线圈架110中的凹槽可以具有与第一线圈120的形状对应的形状,即,闭合曲线形状(例如,环形形状)。126.线圈架110可以在其中设置有第一坐置凹槽,感测磁体180坐置、配装、固定或设置在该第一坐置凹槽中。此外,线圈架110可以在其外表面中设置有第二坐置凹槽,平衡磁体185坐置、配装、固定或设置在该第二座凹槽中。例如,线圈架110中的第一坐置凹槽和第二坐置凹槽可以形成在线圈架110的彼此相反的外表面中。127.第一线圈120可以设置在线圈架110处、或者可以联接至线圈架110。例如,第一线圈120可以设置在线圈架110的外表面上。128.第一线圈120可以沿卷绕方向绕光轴oa环绕线圈架110的外表面,但不限于此。129.尽管第一线圈120可以直接地绕线圈架110的外表面卷绕,但本公开内容不限于此。在另一实施方式中,第一线圈120可以实施为绕线圈架110卷绕的线圈环、或者实施为具有成角度的形状的线圈块。130.可以向线圈120供应电力或驱动信号。131.供应给第一线圈120的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量的信号,并且可以是电压型或电流型。132.当向第一线圈120供应驱动信号(例如,驱动电流)时,可以产生通过与第一磁体的电磁相互作用而产生的电磁力,从而凭借所产生的电磁力使线圈架110沿光轴oa的方向移动。133.在af操作单元的初始位置处,线圈架110可以向上或向下移动,这称为af操作单元的双向驱动。替代性地,在af操作单元的初始位置处,线圈架110可以向上(或向前)移动,这称为单向驱动。134.在af操作单元的初始位置处,第一线圈120可以设置成在平行于与光轴oa垂直并延伸穿过光轴的线的方向上与设置在壳体140处的磁体130对应。135.例如,af操作单元可以包括线圈架110和与线圈架110联接的部件(例如,第一线圈120、感测磁体180和平衡磁体185)。af操作单元还可以包括透镜模块400。136.af操作单元的初始位置可以是在没有电力施加至第一线圈120的状态下af操作单元的初始位置,或者是由于上弹性构件150和下弹性构件160仅因af操作单元的重量弹性地变形而导致af操作单元所处的位置。137.另外,线圈架110的初始位置可以是当重力沿从线圈架110至基座210的方向作用时或当重力沿从基座210至线圈架110方向作用时af操作单元所处的位置。138.感测磁体180可以提供由第一位置传感器170检测的磁场,并且平衡磁体185可以用于抵消感测磁体180的磁场的影响并相对于感测磁体180建立重量平衡。139.感测磁体180可以替代性地被称为“传感器磁体”。140.感测磁体180可以设置在线圈架110处或者可以联接至线圈架110。141.感测磁体180可以设置成面向第一位置传感器170。142.平衡磁体185可以设置在线圈架110处,或可以联接至线圈架110。例如,平衡磁体185可以设置成与感测磁体180对置。143.尽管感测磁体180和平衡磁体185中的每一者可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,感测磁体180和平衡磁体185中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。144.感测磁体180可以与线圈架110一起沿光轴方向移动,并且第一位置传感器170可以检测沿光轴方向移动的感测磁体180的磁场的强度或磁力,并且可以输出与检测结果对应的输出信号。145.例如,根据线圈架110在光轴方向上的位移,由第一位置传感器170检测到的磁场的强度或磁力可以变化。因此,第一位置传感器170可以输出与检测到的磁场的强度成比例的输出信号,并且可以使用来自第一位置传感器70的输出信号来检测线圈架110在光轴方向上的位移。146.壳体140在其中容纳线圈架110,并支承磁体130、第一位置传感器170和电路板190。147.参照图4、图6和图7,壳体140可以构造成整体上具有中空的柱体。例如,壳体140可以具有多边形(例如,矩形或八边形)或圆形的孔,并且壳体140中的开孔可以是沿光轴方向穿过壳体140形成的通孔。148.壳体140可以包括侧部部分和拐角,侧部部分对应于或面向盖构件300的侧板302,该拐角对应于或面向盖构件300的拐角。149.为了防止与盖构件300的上板301的内表面直接碰撞,壳体140可以包括设置在其上部分、上表面或上端部处的止挡部145。150.为了防止壳体140的下表面与图像传感器350的电路板800碰撞,壳体140还可以包括从其下表面突出的止挡部。此处,止挡部145可以替代性地被称为“凸台”或“突出部”。151.参照图4,壳体140可以具有构造成在其中容纳电路板190的安装凹槽(或坐置凹槽)14a。安装凹槽14a可以具有与电路板190的形状对应的形状。152.参照图6,壳体140可以具有开口141,电路板190的端子构件95的端子b1至b6通过开口141暴露出。开口141可以形成在壳体140的侧部部分中。153.壳体140的上部分、上端部或上表面可以设置有至少一个第一联接器,所述至少一个第一联接器将连接至上弹性构件150的第一外框架152。154.壳体140的下部分、下端部或下表面可以设置有第二联接器,该第二联接器将联接并固定至下弹性构件160的第二外框架162。例如,壳体140的第一联接器和第二联结器中的每一者可以具有突出部、凹槽或平坦表面的形状。155.磁体130可以设置在壳体140处。例如,磁体130可以设置在壳体140的侧部部分处。磁体130可以是用于af操作的af操作磁体。156.例如,尽管磁体130可以包括设置在彼此相对定位的两个侧部部分处的第一磁体130-1和第二磁体130-2,但本公开内容不限于此。在另一实施方式中,磁体130可以设置在壳体140的拐角处。157.磁体130可以包括两个或更多个磁体。158.在af操作单元的初始位置处,第一磁体130可以在壳体处设置成在平行于与光轴oa垂直并延伸穿过光轴oa的线的方向上与第一线圈120部分地重叠。159.尽管第一磁体130-1和第二磁体130-2中的每一者可以是单极磁化磁体,但本公开内容不限于此。在另一实施方式中,第一磁体130-1和第二磁体130-2中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。160.电路板190可以设置在壳体140处,并且第一位置传感器170可以设置在电路板190处或安装至电路板190。例如,电路板190可以设置在壳体140中的安装凹槽14a中,并且电路板140的端子可以通过壳体140中的开口141暴露于壳体140的外部。161.电路板190可以包括端子构件(或端子单元)95,端子构件95包括多个端子b1至b6,所述多个端子b1至b6将与外部端子或外部设备导电地连接,并且所述多个端子b1至b6可以与第一位置传感器170导电地连接。162.第一位置传感器170可以设置在电路板190的第一表面上,并且多个端子b1至b6可以设置在电路板190第二表面上。此处,电路板190的第二表面可以是与电路板190的第一表面相反的表面。例如,电路板190的第一表面可以是电路板190的面向线圈架110或感测磁体180的表面。163.例如,电路板190可以实施为印刷电路板或柔性印刷电路板(fpcb)。164.电路板190可以包括用于将第一端子b1至第六端子b6导电地连接至第一位置传感器170的电路图案或布线(未示出)。165.第一位置传感器170可以对安装在线圈架110上的感测磁体180在线圈架110运动期间的磁场或磁场的强度进行检测,并且可以输出与检测结果对应的输出信号。166.第一位置传感器170可以仅实施为单个霍尔传感器。第一位置传感器170可以包括两个输入端子和两个输出端子,驱动信号或电力供应至两个输入端子,感测电压(或输出电压)通过两个输出端子输出。167.例如,驱动信号可以通过电路板190的第一端子b1和第二端子b2供应给第一位置传感器170,并且第一位置传感器170的输出可以通过第三端子b3和第四端子b4输出至外部。168.电路板190的第五端子b5和第六端子b6可以导电地连接至上弹性构件150和下弹性构件160中的至少一者,以便向第一线圈120供应驱动信号。169.例如,电路板190的第五端子b5和第六端子b6可以导电地连接至上弹性构件150的第一弹性构件150-1和第二弹性构件150-2,以便通过第一弹性构件150-1和第二弹性构件150-2向第一线圈120供应驱动信号。170.在另一实施方式中,第一位置传感器170可以实施为包括霍尔传感器的驱动器ic。例如,第一位置传感器170可以包括霍尔传感器和驱动器。此处,第一位置传感器170可以包括:第一端子至第四端子,借助于第一端子至第四端子,通过使用协议比方说例如i2c通信的数据通信将数据传输至外部以及从外部接收数据;以及第五端子和第六端子,借助于第五端子和第六端子,将驱动信号直接供应至第一线圈120。第一位置传感器170的第一端子至第四端子可以导电地连接至电路板190的第一端子至第四端子b1至b4。171.第一位置传感器170的第五端子和第六端子可以通过上弹性构件150和下弹性构件160中的至少一者导电地连接至第一线圈120,以便向第一线圈120供应驱动信号。例如,第一位置传感器170的第五端子和第六端子可以导电地连接至第一弹性构件150-1和第二弹性构件150-2,以便向第一线圈120供应驱动信号。电容器195可以设置或安装在电路板190的第一表面上。172.电容器195可以构造成具有芯片形状。此处,芯片可以包括与电容器195的一个端部对应的第一端子以及与电容器195的另一个端部对应的第二端子。电容器195可以替代性地被称为“电容元件”或“蓄电器(condenser)”。173.电容器195可以与电路板190的第一端子b1和第二端子b2导电地并联连接,通过第一端子b1和第二端子b2从外部向位置传感器170供应电力(或驱动信号)。替代性地,电容器195可以与第一位置传感器170的端子导电地并联连接,第一位置传感器170导电地连接至电路板190的第一端子b1和第二端子b2。174.由于电容器195与电路板190的第一端子b1和第二端子b2导电地并联连接,因此电容器195能够用作平滑电路,以消除从外部供应给第一位置传感器170的电力信号gnd和vdd中包括的纹波分量,并且因此能够向第一位置传感器170供应稳定且一致的电力信号。175.上弹性构件150可以联接至线圈架110的上部部分、上端部或上表面以及壳体140的上部部分、上端部或上表面,并且下弹性构件160可以联接至线圈架110的下部部分、下端部或下表面或者壳体140的上部部分、上端部和上表面。176.上弹性构件150和下弹性构件160可以相对于壳体140弹性地支承线圈架110。177.例如,上弹性构件150可以包括第一弹性构件150-1和第二弹性构件150-2。尽管下弹性构件160在图4中实施为单个单元或单个结构,但本公开内容不限于此。178.在另一实施方式中,上弹性构件和下弹性构件中的至少一者可以包括多个弹性单元或弹簧,所述多个弹性单元或弹簧彼此在导电方面隔离或间隔开。179.上弹性构件150还可以包括:第一内框架151,第一内框架151联接或固定至线圈架110的上部部分、上表面或上端部;第二内框架152,第二内框架152联接或固定至壳体140的上部部分、上表面或上端部;以及第一框架连接器153,第一框架连接器153将第一内框架151连接至第一外框架152。180.下弹性构件160可以包括:第二内框架161,第二内框架161联接或固定至线圈架110的下部部分、下表面或下端部;第二外框架162-1至162-3,第二外框架162-1至162-3联接或固定至壳体140的下部部分、下表面或下端部;以及第二框架连接器163,第二框架连接器163将第二内框架161连接至第二外框架162-1至162-3。181.第一框架连接器153和第二框架连接器163中的每一者可以弯折或弯曲(或者可以形成为曲线)至少一次,以便限定预定的图案。182.上弹性构件150和下弹性构件160中的每一者可以由导电材料制成。183.参照图4和图5,电路板190可以包括两个焊盘5a和5b。例如,尽管第一焊盘5a可以设置在电路板190的第二表面上,并且第二焊盘5b可以设置在电路板190的第一表面上,但本公开内容不限于此。在另一实施方式中,第一焊盘和第二焊盘两者可以仅形成在电路板190的第一表面和第二表面中的一者上。184.第一焊盘5a和第二焊盘5b可以导电地连接至电路板190的第五端子b5和第六端子b6。例如,第一焊盘5a可以联接至第一弹性构件150-1,并且第二焊盘5b可以联接至第二弹性构件150-2。185.例如,第一弹性构件150-1的第一外框架可以包括第一联接器4a,第一联接器4a构造成联接至第一焊盘5a,并且第二弹性构件150-2的第一外框架可以包括第二联接器4b,第二联结器4b构造成联接至第二焊盘5b。186.例如,第一线圈120的一个端部可以联接至第一弹性构件150-1,并且第一线圈120的另一个端部可以联接至第二弹性构件150-2。187.在另一实施方式中,上弹性构件可以联接至电路板190的第一焊盘,以便与其导电地连接,并且下弹性构件可以联接至电路板190的第二焊盘,以便与其导电地连接。在另一实施方式中,下弹性构件可以包括两个下弹性构件,并且所述两个下弹性构件中的每个下弹性构件可以联接或导电地连接至电路板190的第一焊盘和第二焊盘中的对应的一者。第一线圈120可以导电地连接至这两个下弹性构件。188.图8是图像传感器单元350的立体图。图9是图像传感器单元350的分解立体图。图10是图9中所示的第二电路板800和壳体450的立体图。图11是图9中所示的第二电路板800、壳体450和磁体23的立体图。图12a是保持器270、第二线圈230、第一电路板250、第二位置传感器240、图像传感器810、支承构件220和连接弹性构件280的分解立体图。图12b是图12a中所示的保持器270、第二线圈230、第一电路板250、第二位置传感器240、滤光器保持器600和滤光器610的立体图。图13a是图12a中所示的保持器270的底部立体图。图13b是保持器270和第一电路板250的底视图。图14是保持器270、图像传感器810、第一电路板250、支承构件220和连接弹性构件280的分解立体图。图15是保持器270、第一电路板250和连接弹性构件280的底视图。图16是保持器270、第一电路板250、连接弹性构件280和绝缘构件285的底视图。图17是连接弹性构件280的局部放大图。图18是一个连接弹簧281和一个支承构件220的底视图。图19a是图1中所示的相机模块的沿着线a-b截取的横截面图。图19b是图1中所示的相机模块10的沿着线c-d截取的横截面图。图20是图1中所示的相机模块10的沿着线i-j截取的横截面图。图21是图8中所示的图像传感器单元350的沿着线e-f截取的横截面图。189.参照图8至图21,图像传感器单元350可以包括固定部分和可移动部分,固定部分包括磁体23,可移动部分包括与固定部分间隔开的第一电路板250、设置在第一电路板250上的第二位置传感器240、设置成面向磁体23的第二线圈230、以及设置在第一电路板250与第二线圈230之间的间隔件。190.间隔件可以是例如保持器270。保持器270也可以与间隔件互换地使用。间隔件可以包括一个或更多个孔41a至41c。191.第二位置传感器240的至少一部分可以设置在间隔件中的孔41a至41c中并且可以在光轴方向上与磁体23重叠。192.间隔件中的孔41a至41c可以在光轴方向上与第二线圈230的至少一部分重叠。193.第二位置传感器240可以在光轴方向上不与第二线圈230重叠。194.第二线圈230可以具有形成在其中心中的孔11a,并且间隔件中的孔41a至41c中的每个孔可以在光轴方向上与第二线圈230中的孔11a重叠。195.第二位置传感器240可以在光轴方向上与第二线圈230中的孔11a和间隔件中的孔41a至41c中的每个孔重叠。196.可以在磁体130与第二位置传感器240之间限定有空间。例如,第二线圈230的至少一部分和/或间隔件的至少一部分可以不置于或设置在磁体130与第二位置传感器240之间的空间中。197.图像传感器单元250可以包括弹性支承构件220和280,弹性支承构件220和280联接至固定部分和可移动部分两者。弹性支承构件220和280可以相对于固定部分柔性地支承可移动部分。弹性支承构件220和280可以替代性地被称为“支承构件”或“弹性构件”。198.固定部分可以包括与第一电路板250间隔开的第二电路板800,并且弹性支承构件220和280可以将第一电路板800导电地连接至第二电路板800。199.第二线圈230可以联接至间隔件,并且可以导电地连接至第一电路板250。200.根据本发明的实施方式的相机模块可以包括透镜模块(或透镜)400、设置在与透镜对应的位置处的图像传感器810、构造成使图像传感器810移动的驱动单元、与透镜间隔开的第一电路板250、设置在第一电路板250上的第二位置传感器240、以及设置在第一电路板250上的间隔件。例如,驱动单元可以包括磁体23和设置成面向磁体23的第二线圈230,并且间隔件可以设置在第一电路板250与第二线圈230之间以便将第二线圈230与第二位置传感器240间隔开。图像传感器810可以沿垂直于光轴方向的方向移动。201.替代性地,根据本发明的实施方式的图像传感器单元可以包括具有磁体23的固定部分、具有与固定部分间隔开的第一电路板250的可移动部分、设置在第一电路板230上的保持器270、设置在保持器270上以便面向磁体23的第二线圈230、以及设置在第一电路板250上以便面向磁体23的第二位置传感器240、以及联接至固定部分和可移动部分两者的弹性支承构件220和280。202.可移动部分可以通过磁体23与第二线圈230之间的相互作用沿垂直于光轴的方向移动,并且第二线圈240可以在垂直于光轴方向的方向上不与第二位置传感器240重叠。203.弹性支承构件220和280可以在其一个端部处联接至第二电路板800,并且在其另一个端部处联接至第一电路板250。换句话说,弹性支承构件220和280可以将第一电路板800连接至第二电路板800。204.第二线圈230可以具有形成在其中心中的孔11a,并且第二位置传感器240可以设置在第二线圈230中的孔11a下方,以便在光轴方向上与孔11a重叠。205.保持器270可以在其中具有对应于第二位置传感器240的通孔,并且第二位置传感器240可以设置在保持器270中的通孔中。例如,第二位置传感器240可以在垂直于光轴的方向上与保持器270重叠。206.第一电路板260的四个拐角可以设置有从第一电路板的侧向侧表面突出的突起52a至52d,并且保持器270的下表面可以在其中形成有坐置凹槽51a至51d,第一电路板250的突起51a至52d设置在坐置凹槽51a至51d中。207.第二线圈230可以包括设置在保持器270的第一拐角至第四拐角处的第一线圈单元230-1至第四线圈单元230-4,并且磁体23可以包括与第一线圈单元230-1对应的第一磁体23a、与第二线圈单元230-2对应的第二磁体23b、与第三线圈单元230-3对应的第三磁体23c、以及与第四线圈单元230-4对应的第四磁体23d。208.第二位置传感器240可以包括设置在第一线圈单元230-1下方的第一传感器240a、设置在第二线圈单元230-2下方的第二传感器240b以及设置在第三线圈单元230-3下方的第三传感器240c。209.例如,第一线圈单元230-1至第四线圈单元230-4中的每一者可以独立地被激活。换句话说,第一线圈单元230-1至第四线圈单元230-4可以由各自的驱动信号激活。210.在另一实施方式中,第一线圈单元230-1至第三线圈单元230-4可以独立地被激活,并且第四线圈单元230-4可以与第一线圈单元230-1至第三线圈单元230-3中的一者一起被激活。例如,第一线圈单元230-1至第三线圈单元230-3可以由不同的驱动信号激活,并且第四线圈单元230-4可以与第一线圈单元230-1至第三线圈单元230-3中的一者一起由同一驱动信号激活。211.例如,图像传感器单元350可以包括第二电路板800、磁体23、保持器270、第一电路板250、第二线圈230、第二位置传感器240和图像传感器810。图像传感器单元350还可以包括连接弹性构件280和支承构件220。212.图像传感器单元350还可以包括壳体450,壳体450构造成接纳第二电路板800的至少一部分。213.第二电路板800可以用于将信号从外部供应至图像传感器单元350或者将信号从图像传感器单元320供应至外部。214.第二电路板800可以替代性地被称为固定电路板、辅助电路板、固定板等。215.参照图9和图10,第二电路板800可以包括:第一区域801,第一区域801与af操作单元100对应;第二区域802,连接器840设置在第二区域802处;以及第三区域803,第三区域803将第一区域801连接至第二区域802。连接器840可以导电地连接至第二电路板800的第二区域802,并且可以包括构造成导电地连接至外部设备的端口。216.尽管第二电路板800的第一区域801和第二区域802中的每一者可以包括柔性基底和刚性基底,并且第三区域803可以包括柔性基底,但本公开内容不限于此。在另一实施方式中,电路板800的第一区域801至第三区域803中的至少一者可以包括刚性基底和柔性基底中的至少一者。217.第一区域801可以替代性地被称为第一基底,第二区域802可以替代性地被称为第二基底,并且第三区域803可以替代性地被称为第三基底。218.第二电路板800可以具有与线圈架110中的孔、透镜模块400和/或图像传感器810对应的孔800a。例如,第二电路板800中的孔800a可以形成在第一区域801中。219.参照图10、图11和图19a。透镜模块400的至少一部分可以延伸穿过第二电路板800中的孔800a,并且可以定位在第二电路板800的第二表面44b下方。220.透镜模块400可以设置在第一电路板250上。例如,透镜模块400可以定位在设置在滤光器保持器600处的滤光器610上。221.例如,透镜模块400的透镜或透镜镜筒的下部部分、下端部或下表面可以延伸穿过第二电路板800中的孔800a,并且可以定位在第二电路板800的第二表面44b下方。222.例如,透镜模块400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在第一电路板250的第一表面60a上方。223.此外,透镜模块400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在保持器260中的孔70上方。224.尽管第二电路板800可以构造成当从上方观察时具有多边形形状(例如,四边形形状、矩形形状或正方形形状),但本公开内容不限于此。在另一实施方式中,第二电路板800可以构造成具有另一形状,比如圆形形状。此外,尽管第二电路板800中的孔800a可以构造成具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,孔800a可以构造成具有另一形状,比如圆形形状。225.第二电路板800可以包括与支承构件220对应的至少一个焊盘。例如,第二电路板800的至少一焊盘可以包括多个焊盘800b。此处,焊盘800b可以替代性地被称为“引线图案”、“引线构件”或“孔”。226.第二电路板800可以具有与支承构件220对应的至少一个孔,并且所述孔可以穿过第二电路板800形成。例如,第二电路面板800可以包括与多个支承构件对应的多个通孔。227.例如,多个焊盘800b中的每一个焊盘可以具有沿光轴方向穿过第二电路板800形成的孔。228.多个焊盘800b中的每个焊盘可以形成为环绕电路板800中的孔,并且还可以包括引线图案或导电层。229.支承构件220可以在延伸穿过电路板800中的孔的状态下焊接至焊盘800b,并且可以导电地连接至设置在焊盘800a周围的引线图案。230.例如,多个焊盘800b可以以预定的间隔彼此间隔开,以便环绕第二电路板800中的孔800a。例如,多个焊盘800b可以设置在第二电路板800中的孔800a与第二电路板800的侧部之间。231.第二电路板800可以具有至少一个联接孔800c,联接孔800c构造成联接至壳体450的联接突出部45b。尽管联接孔800c可以是穿过第二电路板800形成的通孔,但本公开内容不限于此。在另一实施方式中,联接孔800c可以是凹槽。232.例如,尽管联接孔800c可以实施为多个联接孔,所述多个联接孔形成在第二电路板800的拐角中,这些拐角在对角线方向上是彼此相对的,但本公开内容不限于此。联接孔可以定位在电路板800的侧部附近或电路板800的侧部与孔800a之间。233.第二电路板800可以包括至少一个端子,例如,多个端子7a至7f。234.多个端子7a至7f可以形成在第二电路板800的第一表面(例如,上表面)44a上。例如,多个端子7a至7f可以设置在第二电路板800的与第二电路板800的一个拐角相邻的一个侧部处。235.多个端子7a至7f中的每个端子可以经由导电粘合构件或焊料导电地连接至电路板190的端子b1至b6中的对应一者。236.例如,第二电路板800可以包括端子构件80a,多个端子7a至7f在端子构件80a处形成。尽管端子构件80a从第二电路板800的一个侧部沿垂直于光轴的方向突出,但本公开内容不限于此。在另一实施方式中,端子构件80a可以不从电路板800的一个侧部突出。237.图像传感器单元350还可以包括壳体450,第二电路板800设置、坐置或接纳在壳体450中。238.壳体450可以联接至第二电路板800的至少一部分。壳体450可以在其中接纳磁体23,并且可以替代性地被称为“磁体保持器”。239.例如,第二电路板800可以设置在af操作单元100下方,并且可以联接至af操作单元100。例如,粘合构件310可以设置在第二电路板800与af操作单元100之间,以便将第二电路板800和af操作单元100彼此连接。240.例如,粘合构件310可以设置在第二电路板800的第一表面44a与af操作单元100的壳体140的下部部分、下表面或下端部之间,以便将其彼此联接。241.在另一实施方式中,af操作单元100的壳体140还可以联接至图像传感器单元350的壳体450。例如,图像传感器单元的上部部分、上端部或上表面也可以经由粘合构件或联接结构联接至af操作单元100的壳体140的下部部分、下端部或下表面。242.壳体450可以设置在第二电路板800下方。例如,af操作单元100可以设置在第一电路板800上方,并且壳体450可以设置在第二电路板800下方。243.壳体450可以具有与第二电路板800的第一区域801对应或一致的形状。尽管壳体450可以构造成当从上方观察时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,壳体450可以构造成具有圆形形状或椭圆形形状。244.壳体450可以具有形成在其中的孔450a。壳体450中的孔450a的至少一部分可以与第二电路板800中的孔800a对应或重叠。245.尽管壳体450中的孔450a可以构造成当从上方观察时具有多边形形状(例如,四边形形状或八边形形状)、圆形形状或十字形形状,但本公开内容不限于此。壳体450中的孔450a可以是沿光轴方向穿过壳体450形成的通孔。246.壳体450可以包括从其本体42的上表面突出的至少一个联接突出45b。例如,联接突出部45b可以从壳体450的上表面沿从壳体450的上表面朝向第二电路板800的第二表面(例如,下表面)44b的方向突出。247.壳体450可以包括与多个焊盘800b对应的避让区域41。避让区域41可以形成在与支承构件220对应的位置处,以避免壳体450与支承构件220之间发生空间干涉。248.参照图1至图10,第二电路板800可以包括与af操作单元100的电路板190的端子b1至b6对应的端子7a至7f。249.第二电路板800的端子7a至7f中的每个端子可以导电地连接至af操作单元100的电路板190的端子b1至b6中的对应的一个端子。驱动信号或电力可以通过第二电路板800供应至第一位置传感器170,并且第一位置传感器170的输出可以输出至第二电路板800。此外,驱动信号或电力可以通过第二电路板800供应至第一线圈120。250.参照图11,第二电路板800可以包括设置在第二区域802中的连接器840。例如,连接器840可以设置在第二电路板800的第二区域802的一个表面(例如,下表面或上表面)上。251.壳体450可以包括坐置部分8a,磁体23接纳、设置或坐置在坐置部分8a中。坐置部分8a可以形成在壳体450的下表面中。252.例如,坐置部分8a可以是从壳体450的下表面凹陷的凹槽,并且可以具有与磁体23的形状对应的形状。253.例如,尽管坐置部分8a可以形成在壳体450的拐角中,但本公开内容不限于此。在另一实施方式中,坐置部分8a可以形成在壳体450的侧部中。254.例如,尽管壳体450可以包括分别形成在其四个拐角中的四个坐置部分8a,但本公开内容不限于此。在另一实施方式中,壳体450可以包括与磁体23的数目对应的多个坐置部分。255.磁体23可以经由粘合构件附接或联接至壳体450的坐置部分8a。此处,导引凹槽9a可以形成在壳体450的坐置部分8a中以便导引粘合构件。导引凹槽9a可以用于将粘合构件均匀地分散在坐置部分8a中。256.磁体23可以设置在壳体450处。例如,尽管磁体23可以设置在壳体140的拐角处,但本公开内容不限于此。在另一实施方式中,磁体23可以设置在壳体450的侧部部分处。257.磁体23可以用于提供磁场,该磁场与第二线圈230相互作用以出于手抖动校正的目的执行ois(光学稳像)。258.例如,磁体23可以包括多个磁体23a至23d。磁体23a至23d中的每个磁体可以设置在壳体450的拐角中的对应的一个拐角处。259.尽管磁体23a至23d中的每个磁体可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,磁体23a至23d中的每个磁体可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。260.当磁体23a至23d中的每一个磁体是双极磁化磁体时,磁体23a至23d中的每个磁体可以包括第一磁体部分、第二磁体部分和设置在第一磁体部分与第二磁体部分之间的分隔壁。此处,分隔壁也可以替代性地被称为“非磁性分隔壁”。261.例如,第一磁体部分和第二磁体部分中的每一者可以包括n极、s极以及位于n极与s极之间的接合部分。接合部分可以是基本上没有磁性并且具有几乎没有极性的区域的部分,并且可以是自然形成以便形成包括一个n极和一个s极的磁体的部分。262.分隔壁可以将第一磁体部分与第二磁体部分彼此分离或隔离,并且可以是基本上没有磁性或极性的部分。例如,分隔壁可以是非磁性材料、空气等。非磁性分隔壁可以被视为“中性区”或“中性部分”。263.分隔壁可以是当第一磁体部分和第二磁体部分被磁化时人工形成的部分,并且分隔壁的宽度可以大于接合部分的宽度。264.例如,尽管磁体23a至23d中的每个磁体的分隔壁可以沿平行于第二电路板800或第一电路板250的方向定向,但本公开内容不限于此。在另一实施方式中,分隔壁可以沿垂直于第二电路板800或第一电路板250的方向定向。265.例如,四个磁体23a至23d中的每个磁体可以设置在壳体450的四个拐角中的对应的一个拐角处。例如,尽管设置在壳体450的两个相邻拐角处的两个磁体(例如,23a和23b)可以定向为彼此垂直,并且设置在壳体450的在对角线方向上面向彼此的两个拐角处的两个磁体(例如,23a和23c;23b和23d)可以定向成彼此平行,但本公开内容不限于此。266.例如,磁体23a至23d的内部可以具有相同的极性。此外,磁体23a至23d的外部可以具有相同的极性。267.例如,磁体23a至23d中的每个磁体的内部可以被磁化为n极,并且磁体23a至23d中的每个磁体的外部可以被磁化为s极。在变型中,磁体23a至23d中的每个磁体的内部可以被磁化为s极,并且磁体22a至22d中的每个磁体的外部可以被磁化为n极。268.保持器270可以设置在第二电路板800下方。保持器270可以与第二电路板800间隔开,并且可以联接至第一电路板250。269.保持器270可以在其中接纳第二线圈230或者可以对第二线圈230进行支承。保持器270可以用于对第二线圈230进行支承,使得第二线圈230与电路板250间隔开。270.例如,保持器270的下部部分、下表面或下端部可以联接至第一电路板250的上部部分、上表面或上端部。271.参照图13a和图13b,保持器270的下表面42b可以包括第一表面36a和第二表面36b。第二表面36b可以在光轴方向上相对于第一表面36a具有高度差。例如,第二表面36b可以定位在第一表面36a上方。例如,第二表面36b可以定位成比第一表面36a更靠近保持器270的上表面42a。例如,保持器270的上表面42a与第二表面36b之间的距离可以小于保持器270的上表面42a与第一表面36a之间的距离。272.保持器270可以包括将第一表面36a连接至第二表面36b的第三表面36c。例如,尽管第一表面36a和第二表面36b可以彼此平行,并且第三表面36c可以垂直于第一表面36a和/或第二表面36b,但本公开内容不限于此。在另一实施方式中,在第三表面36c与第一表面36a(或第二表面36b)之间限定的夹角可以是锐角或钝角。273.第一表面36a可以定位在保持器270的下表面42b的周缘处,并且第二表面36b可以定位在保持器270的中心区域中。274.保持器70可以在其中具有与电路板250的上表面的区域对应的孔70。275.尽管保持器270中的孔70可以当从上方观察时具有多边形形状,例如,四边形形状、圆形形状或椭圆形形状,但本公开内容不限于此。孔70可以具有各种形状中的任何形状。276.例如,保持器270中的孔70可以构造成具有使得将图像传感器810和设置在第一电路板250上的一些元件暴露出来的形状或尺寸。例如,保持器270中的孔70的表面积可以小于第一电路板250的第一表面60a的表面积。277.例如,孔70可以穿过保持器270的下表面42b的第二表面36b形成。278.保持器270可以在其中具有与第二位置传感器240对应的孔41a、41b和41c。例如,保持器270可以在其中具有在与第一传感器至第三传感器240a、240b和240c分别对应的位置处形成的孔41a、41b和41c。279.例如,孔41a、41b和41c可以定位成与保持器270的拐角相邻。保持器270还可以具有形成为与保持器270的拐角相邻的虚设孔41d,虚设孔41d不与第二位置传感器240中的任何第二位置传感器对应。虚设孔40d可以用于在ois操作期间实现ois可移动单元的重量平衡。在另一实施方式中,可以不形成虚设孔41d。280.孔41a、41b和41c可以沿光轴方向穿过保持器270形成。例如,尽管孔41a、41b和41c可以形成在保持器270的下表面42b的第二表面36b中,但本公开内容不限于此。在另一实施方式中,可以省去保持器270中的孔41a、41b和41c。281.注射孔33a可以形成在保持器270的下表面42b中,以与模具中的注射孔对应,该模具构造成注射用于形成保持器270的材料。282.第一电路板250可以设置在保持器270的下表面42b的第二表面36b上。第一电路板250可以替代性地被称为“传感器板”、“主板”、“主电路板”、“传感器电路板”或“可移动电路板”。283.在所有实施方式中,第一电路板250可以替代性地被称为“第二板”或“第二电路板”,并且第二电路板800可以替代性地被称为“第一板”或“第一电路板”。284.第一电路板250的第一表面60a可以经由粘合构件联接或附接至保持器270的下表面42b的第二表面36b。285.此处,电路板250的第一表面60a可以是面向第二电路板800或af操作单元100并且其上布置有图像传感器810的表面。电路板250的第二表面60b可以是与电路板250的第一表面60a相反的表面。286.保持器270的下表面42b可以在其中设置有坐置凹槽51a至51d,电路板250的至少一部分配装和设置在坐置凹槽51a至51d中。287.坐置凹槽51a至51d可以分别形成在保持器270的下表面42b的四个拐角中,以便与第一电路板250的突起52a至52d对应。288.例如,保持器270的下表面42b的第一表面36a可以环绕电路板250的突起52a至52d,并且第一电路板250的侧向侧表面52a至52d可以面向保持器270的第三表面36c。粘合构件可以设置在第一电路板250的突起52a至52d与保持器270中的坐置凹槽51a至51d之间,以便将突起联接至坐置凹槽。289.第一电路板250的突起52a至52d可以用于增加保持器2170与第一电路板250之间的联接力并防止电路板250旋转并且因此未对准。290.第一电路板250的突起52a至52d可以在光轴方向上与保持器270中的坐置部分51a重叠。此外,孔41a、41b和41c可以在光轴方向上与保持器270中的坐置凹槽51a的至少一部分重叠。此外,孔41a、41b和41c可以与第一电路板250上的突起52a至52d的至少一部分重叠。291.至少一个凹槽272可以形成在保持器270的下表面42b的第一表面36a中,以便从第一表面36a凹陷。例如,保持器270可以具有与下表面42b的多个侧部(例如,四个侧部)对应的多个凹槽(例如,四个凹槽)。292.凹槽272可以包括:底部72a,底部72a从保持器270的下表面42b的第一表面36a凹陷,以便在光轴方向上在其之间具有高度差;以及侧向侧壁72b,侧向侧壁72b将底部72a连接至第一表面36a。293.例如,凹槽272的底部72a可以定位成比保持器270的下表面42b的第一表面36a更靠近保持器270的上表面42a。此外,凹槽272的底部72a可以定位在保持器270的下表面42b的第一表面36a与第二表面36b之间。294.保持器270可以具有至少一个孔270a,支承构件220延伸穿过孔270a。例如,保持器270可以具有与多个支承构件220对应的多个孔270a。孔270a可以用于避免与支承构件发生空间干涉。在另一实施方式中,保持器270可以具有避让凹槽或避让部分来代替孔,以避免与支承构件发生空间干涉。295.例如,多个孔270a可以设置或布置成环绕保持器270中的孔70并以规则间隔彼此隔开。例如,多个孔270a可以布置在保持器270中的孔70和保持器270的侧部之间的区域中。296.例如,孔270a可以是穿过保持器270形成的通孔。保持器270中的多个孔270a可以在光轴方向上与保持器270中的凹槽272重叠。例如,多个孔270a中的每个孔可以在凹槽270的底部72a处敞开。在凹槽272的底部72a处敞开的多个孔270a的端部可以定位成在光轴方向上相对于保持器270的下表面42b的第一表面36a具有高度差。297.例如,多个孔270a可以穿过保持器270中的凹槽272的底部72a形成。298.保持器270中的凹槽272用于避免当连接弹性构件280在ois操作期间弹性变形时与保持器270发生空间干涉,从而使连接弹性构件280容易地弹性变形。299.保持器270的下表面42b可以设置有突起275。例如,突起275可以形成在保持器270的下表面42b的第一表面36a上。300.保持器270的突起275可以从保持器270的下表面42b的第一表面36a沿朝向基座210的底部的方向突出。301.保持器270的突起275可以沿朝向基座210的底部的方向比连接弹性构件280突出得更远。替代性地,保持器270的突起275可以沿朝向基座210的底部的方向比将连接弹性构件280联接至支承构件220的焊料902突出得更远。302.例如,保持器270的突起275与基座210的底部之间在光轴方向上的第一距离可以小于连接弹性构件280与基座210的底部之间的第二距离。例如,第一距离可以小于焊料902与基座210的底部之间的第三距离。303.突起275可以用作止挡部,该止挡部构造成防止在发生外部冲击的情况下保持器270的下表面42b的第一表面36a、连接弹性构件280和/或焊料902与基座210的底部发生碰撞。304.例如,尽管突起275可以设置在保持器270的下表面4b的拐角处,但本公开内容不限于此。在另一实施方式中,突起275可以设置在保持器270的下表面42b的侧部处,或者设置在保持器270的下表面42b的侧部与孔70之间。305.第一电路板250可以设置在第二电路板800下方。306.例如,第一电路板250可以设置在保持器270下方。307.尽管在图12a中,设置有图像传感器810的第一电路板250包括单个电路板,但本公开内容不限于此。在另一实施方式中,第一电路板250可以包括:第三板,图像传感器810设置在该第三板处;以及第四板,第四板导电地连接至第三板。第四板可以经由支承构件220和连接弹性构件280导电地连接至第二电路板800。308.尽管在从上面看时,第一电路板250、例如第一电路板250的周缘可以具有与保持器270的下表面42b一致或对应的形状,但本公开内容不限于此。309.第一电路板250可以包括从其侧向侧表面21a突出的一个或更多个突起52a至52d。310.例如,突起52a至52d可以分别形成在第一电路板250的四个拐角处。311.参照图13b,第一电路板250可以包括第一突起52a至第四突起52d,第一突起52a至第四突起52d分别形成在第一电路板250的四个拐角处。312.第一突起52a至第四突起52d中的每一者可以从第一电路板250的侧向侧表面21a沿 x轴方向、-x轴方向、 y轴方向和-y轴方向中的至少一个方向突出。313.例如,第一突起52a和第三突起52c中的每一者可以从第一电路板250的侧向侧表面21a沿x轴方向和y轴方向两者突出。第二突起52b和第五突起52d中的每一者可以各自沿在y轴方向突出,并且可以相对于彼此沿相反的方向突出。314.第一电路板250可以包括与支承构件220或连接弹性构件280的连接弹簧281对应的至少一个端子262。315.例如,第一电路板250可以包括多个端子262,这些端子在第一电路板250的第二表面60b上设置或布置成彼此间隔开。例如,端子262可以设置成与第一电路板250的侧向侧表面21a相邻。端子262的数目不限于图14中所示的数目,并且可以多于或少于图14中所示的端子262的数目。316.例如,第一电路板250的端子262可以导电地连接至支承构件220。例如,第一电路板250的端子262可以导电地连接至连接弹簧281。317.第一电路板250可以包括端子e1至e8,端子e1至e8构造成导电地连接至第二线圈230。此处,端子e1至e8可以替代性地被称为“焊盘”或“接合部分”。第一电路板250的端子e1至e8可以设置或布置在第一电路板250的第一表面60a上。318.第一电路板250可以是印刷电路板(pcb)或柔性印刷电路板(fpcb)。319.第一电路板250可以具有坐置区域260a,图像传感器810设置在坐置区域260a中。例如,坐置区域260a可以设置在第一电路板250的第一表面(例如,上表面)60a上。例如,保持器270中的孔70可以使穿过孔70设置在坐置区域260a中的图像传感器810敞开或露出。320.第二线圈230可以设置在保持器270处。321.例如,第二线圈230可以设置在保持器270的上表面42a上。322.第二线圈230可以设置在壳体450下方。第二线圈230可以设置在磁体23下方。323.例如,第二线圈230可以在保持器270的上表面42a上设置成在光轴oa的方向上与设置在壳体450处的磁体23对应、面向或重叠。324.第二线圈230可以联接至保持器270。例如,第二线圈230可以联接至保持器270的上表面42a。保持器270的上表面42a可以设置有至少一个联接突出部,所述至少一个联接突出部构造成联接至第二线圈230。325.联接突出部51可以从保持器270的上表面42a沿朝向第二电路板800的方向突出。例如,联接突出部51可以形成为与保持器270中的孔41a至41d中的每一者相邻。326.例如,两个联接突出部51a和51b可以设置或布置在保持器270处,以便与孔41a至41d中的每一者对应,并且一个孔(例如,41a)可以形成在这两个联接突出部51a与51b之间。327.例如,第二线圈230可以包括多个线圈单元230-1至230-4。例如,尽管第二线圈230可以包括四个线圈单元,但本公开内容不限于此。328.多个线圈单元230-1至230-4中的每个线圈单元可以与在光轴(oa)方向上设置在壳体450处的磁体23a至23d中的对应的一个磁体面向或重叠。329.尽管线圈单元230-1至230-4中的每一者可以构造成呈具有闭合曲线形状或环形形状的线圈块的形式,但本公开内容不限于此。例如,线圈单元230-1至230-4中的每一者可以包括fp(精细图案)线圈。在另一实施方式中,线圈单元230-1至230-4可以形成在除了第一电路板250之外的另外的电路构件处。330.例如,四个线圈单元230-1至230-4中的每个线圈单元可以设置在保持器270的四个拐角中的对应的一个拐角处。331.线圈单元230-1至230-4中的每个线圈单元可以联接至与其对应的保持器270的两个联接突出部51a和51b。例如,线圈单元230-1至230-4中的每一者可以直接绕保持器270的两个对应的联接突出部51a和51b卷绕。332.线圈单元230-1至230-4可以在光轴方向上对应于或面向电路板250的相应的突出部52a至52d。例如,线圈单元230-1至230-4中的每一者的至少一部分可以在光轴方向上与电路板250的突起52a至42d中的对应的一者重叠。333.第二线圈230可以导电地连接至第一电路板250,使得通过第一电路板250向第二线圈230供应电力或驱动信号。334.供应给第二线圈230的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量两者的信号,并且可以是电压型或电流型。335.此处,电流可以被独立地施加至四个线圈单元中的至少三个线圈单元。336.在第一实施方式中,可以通过三个通道控制第二线圈230。337.例如,在第一线圈单元至第四线圈单元中,只有第一线圈单元至第三线圈单元可以彼此在导电方面隔离,并且第四线圈单元可以串联地导电连接至第一线圈单元至第三线圈单元中的一者。此处,可以从第二线圈230引出三对引线,即总共六根引线。338.在第二实施方式中,可以通过四个单独的通道控制第二线圈230。此处,四个线圈单元可以彼此在导电方面隔离。可以选择性地向线圈单元中的每个线圈单元施加正向电流和反向电流中的一者。此处,可以从第二线圈230引出四对引线,即总共八根引线。339.例如,在对角线方向上面向彼此的两个线圈单元230-1和230-3可以沿第一轴向方向(例如,沿y轴方向)延伸或定向,并且在对角线方向上面向彼此的另外两个线圈单元230-2和230-4可以沿第二轴向方向(例如,沿x轴方向)延伸或定向。此处,第一轴向方向可以与第二轴向方向垂直。340.第一线圈单元230-1的长边和第三线圈单元230-3的长边可以设置成彼此平行。第二线圈单元230-2的长边和第四线圈单元230-4的长边可以设置成彼此平行。第一线圈单元230-1的长边和第二线圈单元230-2的长边可以不设置成彼此平行。此处,第一线圈单元230-1的长边和第二线圈单元230-2的长边可以设置成使得从其延伸的假想线彼此相交。例如,第一线圈单元230-1定向所沿的方向和第二线圈单元230-2定向所沿的方向可以彼此垂直。341.在另一实施方式中,四个线圈单元中的至少一个线圈单元可以与其余线圈单元被分开地驱动。在另一实施方式中,四个线圈单元可以被单独地驱动。342.例如,第一线圈单元230-1的一个端部可以连接至第一端子e1,并且第一线圈单元230-1的另一个端部可以连接至第二端子e2。可以向第一端子e1和第二端子e2提供第一驱动信号以激活第一线圈单元230-1。第一端子e1和第二端子e2可以布置成沿与第一线圈单元230-1的长边平行的方向(例如,沿y轴方向)彼此间隔开。343.第二线圈单元230-2的一个端部可以连接至第三端子e3,并且第二线圈单元230-2的另一个端部可以连接至第三端子e4。可以向第三端子e3和第四端子e4提供第二驱动信号以激活第二线圈单元230-2。第三端子e3和第四端子e4可以布置成沿与第二线圈单元230-2的长边平行的方向(例如,沿x轴方向)彼此间隔开。344.第三线圈单元230-3的一个端部可以连接至第五端子e5,并且第三线圈单元230-3的另一个端部可以连接至第六端子e6。可以向第五端子e5和第六端子e6提供第三驱动信号以激活第三线圈单元230-3。第五端子e5和第六端子e6可以布置成沿与第三线圈单元230-3的长边平行的方向(例如,沿y轴方向)彼此间隔开。345.第四线圈单元230-4的一个端部可以连接至第七端子e7,并且第四线圈单元230-4的另一个端部可以连接至第八端子e8。第七端子e7和第八端子e8可以被提供用于激活第四线圈单元230-4的第四驱动信号。第七端子e7和第八端子e8可以布置成沿与第四线圈单元230-4的长边平行的方向(例如,沿x轴方向)彼此间隔开。346.第一端子e1至第八端子e8可以设置在第一电路板250的上表面60a的位于线圈单元230-1至230-4与图像传感器810之间的一个区域中。347.保持器270中的孔70可以使第一电路板250的端子e1至e8暴露。线圈单元230-1至230-4的下表面可以定位成高于第一电路板250的端子e1至e8。348.例如,第一电路板250的端子e1至e8可以定位成低于保持器270的上表面60a。349.在实施方式中,在对角线方向上面向彼此的两个线圈单元(例如,230-3和230-4)可以彼此直接串联连接,并且可以由信号驱动信号激活。同时,在对角线方向上面向彼此的两个线圈单元(例如,230-1和230-2)可以彼此在导电方面隔离,并且可以由不同的驱动信号单独地激活。350.在另一实施方式中,四个线圈单元230-1至230-4可以彼此在导电方面隔离,并且可以由不同的各个驱动信号被单独地激活。351.线圈单元230-1至230-4中的每个线圈单元可以具有形成在其中央的开口或孔,并且两个联接突出部51a和51b可以配装到线圈单元230-1至230-4中的每个线圈单元中的开口11a中(参见图12a)并联接至开口11a。352.例如,线圈单元230-1至230-4中的每个线圈单元的至少一部分可以与设置在壳体450处的磁体23a至23d中的对应的一者重叠。353.包括图像传感器810的ois可移动单元可以通过磁体23a至23d与被施加驱动信号的线圈单元230-1至230-4之间的相互作用而沿第二方向和/或第三方向、例如沿x轴方向和/或沿y轴方向移动,从而执行手抖动校正。稍后将给出对ois可移动单元的描述。354.第二位置传感器240可以设置、联接或安装至第一电路板250的第一表面(例如,上表面)60a。第二位置传感器240可以检测ois可移动单元在垂直于光轴oa的方向上的位移,例如,ois可移动单元沿垂直于光轴的方向的移位或倾斜,或ois可移动单元绕光轴的旋转。355.此处,第一位置传感器170可以替代性地被称为“af位置传感器”,并且第二位置传感器240可以替代性地被称为“ois位置传感器”。356.例如,可以在第一电路板250的突起52a至52c中的每个突起处设置第一位置传感器240。357.第二位置传感器240可以设置在第二线圈230下方。358.第二位置传感器240可以在垂直于光轴的方向上不与第二线圈230重叠。例如,第二位置传感器240的感测元件可以在垂直于光轴的方向上不与第二线圈230重叠。该感测元件可以是构造成检测磁场的元件。359.例如,第二位置传感器240的中心可以在垂直于光轴的方向上不与第二线圈230重叠。例如,第二位置传感器240的中心可以是垂直于光轴的x-y坐标平面上x轴方向和y轴方向上的空间中心。替代性地,第二位置传感器240的中心可以是x轴方向、y轴方向和z轴方向上的空间中心。360.在另一实施方式中,第二位置传感器240的至少一部分可以在垂直于光轴的方向上与第二线圈230重叠。例如,第二位置传感器240的上部区域2a(参见图26)的至少一部分可以在垂直于光轴的方向上与第二线圈230重叠。第二位置传感器240的下部区域2b可以在垂直于光轴的方向上与第二线圈230重叠。上部区域2a可以是第二位置传感器240的长度的中点与第二位置传感器240的上表面之间的区域,并且下部区域2b可以是第二位置传感器240的剩余区域,下部区域2b定位在上部区域2a下方。361.例如,第二位置传感器240可以在光轴方向上与保持器270中的孔41a至41c重叠。例如,第二位置传感器240可以在光轴方向上与第二线圈230中的开口11a或孔重叠。例如,保持器270中的孔41a至41c的至少一部分可以在光轴方向上与第二线圈230中的开口11a或孔重叠。362.第二位置传感器240可以包括一个或更多个传感器240a、240b和240c。例如,第二位置传感器230可以包括三个传感器240a、240b和240c。363.第一传感器至第三传感器240a、240b和240c中的每一者可以实施为仅一个霍尔传感器,或者可以实施为包括霍尔传感器的驱动ic。对第一位置传感器170的描述可以在修改或未修改的情况下应用于第一传感器至第三传感器240a、240b和240c。364.第一传感器至第三传感器240a、240b和240c中的每一者可以导电地连接至第一电路板250的端子262中的预定对应端子。例如,相应的驱动信号可以经由端子262施加至第一传感器至第三传感器240a、240b和240c中的每一者,并且第一传感器至第三传感器中的每一者的输出信号可以输出至端子262中的其他预定端子。365.例如,可以为第一传感器至第三传感器240a、240b和240c中的每一者分配第一电路板250的端子262中的六个或四个不同的端子。366.例如,当第一传感器至第三传感器240a、240b和240c中的每一者是霍尔传感器时,可以为第一传感器至第三传感器240a、240b和240c中的每一者分配四个端子。例如,该四个端子可以是两个输入端子和两个输出端子。367.例如,当第一传感器至第三传感器240a、240b和240c中的每一者是包括霍尔传感器的驱动ic时,可以为第一传感器至第三传感器240a、240b和240c中的每一者分配六个端子。对位置传感器170的描述可以在修改或未修改的情况下应用于第一传感器至第三传感器240a、240b和240c中的每一者与第一电路板250的端子262之间的导电连接、以及驱动信号与位置传感器的输出之间的关系。368.例如,由于通过三个通道控制四个线圈单元230-1至230-4是,因此第一传感器至第三传感器240a、240b和240c中的各者可以设置在三个线圈单元230-1至230-3中的对应的一者中,并且剩余的线圈单元230-4可以不设置有传感器。369.例如,线圈单元230-1至230-4中的每一者可以构造成成其中具有开口11a(参见图12a)、孔或腔的环的形式。例如,第一传感器至第三传感器240a、240b和240c中的每一者可以设置在线圈单元230-1至230-3中的对应一者的开口11a、孔或腔下方。370.例如,第一传感器至第三传感器240a、240b和240c中的每一者可以布置在保持器270的孔41a至41c中的对应一者中。371.例如,第一传感器至第三传感器240a、240b和240c中的每一者可以在垂直于光轴的方向上不与线圈单元230-1至230-3中的对应一者重叠。第一传感器至第三传感器240a、240b和240c可以在垂直于光轴的方向上与保持器270重叠。372.例如,线圈单元230-1至230-4可以设置在保持器270的上表面42a上,并且第一传感器至第三传感器240a、240b和240c可以设置在第一电路板250的第一表面60a上。保持器270的上表面42a可以定位成高于第一电路板250的第一表面60a。373.例如,保持器270的上表面42a可以相对于第一电路板250的第一表面60a具有高度差。374.例如,保持器270的上表面42a与第一电路板250的第一表面60a之间在光轴方向上的高度差可以大于第一传感器至第三传感器240a、240b和240c中的每一者在光轴方向上的长度。在另一实施方式中,保持器270的上表面42a与第一电路板250的第一表面60a在光轴方向上的高度差可以等于第一传感器至第三传感器240a、240b和240c中的每一者在光轴方向上的长度。375.图像传感器810在x轴方向和y轴方向上的所有运动以及图像传感器810绕z轴的旋转可以由三个传感器240a、240b和240c检测。376.三个传感器240a、240b和240c中的一者(例如240a)可以检测ois可移动单元在x轴方向上的运动量和/或位移。三个传感器240a、240b和240c中的另一者(例如240b)可以检测ois可移动单元在y轴方向上的运动量和/或位移。三个传感器240a、240b和240c中的剩余一者可以检测ois可移动单元在x轴方向上和/或y轴方向上的运动量和/或位移。可以使用三个传感器240a、240b和240c中的两者或更多者的输出来检测ois可移动单元围绕z轴的旋转运动。377.参照图12b,当将驱动信号(例如,驱动电流)施加至第一线圈单元230-1和第三线圈单元230-3,但不施加至第二线圈单元230-2或第四线圈单元230-4时,由第一线圈单元230-1与第一磁体23a之间的相互作用产生的第一电磁力的方向和由第三线圈单元230-3与第三磁体23c之间的相互作用产生的第三电磁力的方向可以是同一方向、例如x轴方向(例如, x轴方向或-x轴方向),并且ois可移动单元可以沿x轴方向(例如,沿 x轴方向或沿-x轴方向)移动(移位)。378.例如,当将驱动信号(例如,驱动电流)施加至第二线圈单元230-2和第四线圈单元230-4、但不施加至第一线圈单元230-1或第三线圈230-3时,由第二线圈单元230-2与第二磁体23b之间的相互作用产生的第二电磁力的方向和由第四线圈单元230-4与第四磁体23d之间的相互作用产生的第四电磁力的方向可以是同一方向、例如y轴方向(例如, y轴方向或-y轴方向),并且ois可移动单元可以沿y轴方向(例如,沿 y轴方向或沿-y轴方向)移动(移位)。379.例如,当将驱动信号施加至第一线圈单元230-1至第四线圈单元230-4中的每一者时,第一电磁力的方向和第三电磁力的方向是彼此相反的,第二电磁力的方向和第四电磁力的方向是彼此相反的,并且ois可移动单元由于第一电磁力和第三电磁力而旋转的方向和ois可移动单元由于第二电磁力和第四电磁力而旋转的方向相同,ois可移动单元可以绕光轴或z轴旋转或滚动。380.当通过三个通道控制第二线圈230时,可以使用第一线圈单元230-1和第三线圈单元230-3或第二线圈单元230-2和第四线圈单元230-4使ois可移动单元滚动。381.在图12a和12b中所示的实施方式中,第二位置传感器240可以包括三个传感器240a、240b和240c。382.例如,第一传感器240a可以布置在第一电路板250的第一表面60a的第一拐角处,第二传感器240b可以布置在第一电路板250的第一表面60a的第二拐角处,并且第三传感器240c可以布置在第一电路板250的第一表面60a的第三拐角处。可以不在第一电路板250的第一表面60a的第四拐角处设置传感器。383.第一电路板250的第一表面60a的第一拐角和第三拐角可以在对角线方向上面向彼此,并且第一表面60a的第二拐角和第四拐角可以在对角线方向上面向彼此。384.例如,第一传感器240a可以设置在第一电路板250的第一突起52a的第一表面(或上表面)60a上,并且可以在光轴方向上与第一突起52a重叠。385.第二传感器240b可以设置在第一电路板250的第二突起52b的第一表面(或上表面)60a上,并且可以在光轴方向上与第二突起52b重叠。386.第三传感器240c可以设置在第一电路板250的第三突起52c的第一表面(或上表面)60a上,并且可以在光轴方向上与第三突起52c重叠。387.例如,尽管第一传感器240a可以在光轴oa方向上不与第一线圈单元230-1重叠,第二传感器240b可以在光轴oa方向上不与第二线圈单元230-2重叠,并且第三传感器240c可以在光轴oa方向上不与第三线圈单元230-3重叠,但本公开内容不限于此。在另一实施方式中,第一传感器至第三传感器中的每一者的至少一部分可以在光轴方向上与第一线圈单元至第三线圈单元中的对应一者重叠。388.第一传感器240a可以在光轴方向上与第一磁体23a重叠,第二传感器240b可以在光轴方向上与第二磁体23b重叠,并且第三传感器240c可以在光轴方向上与第三磁体23c重叠。389.尽管第二位置传感器240包括三个传感器,但在另一实施方式中,第二位置传感器240可以包括两个传感器。例如,在另一实施方式中,可以省去第一传感器240a和第三传感器240c中的一者。390.图像传感器单元350可以包括运动传感器820、控制器830、存储器512和电容器81a、81b中的至少一者。391.运动传感器820、控制器830、存储器512和电容器81a、81b可以设置或安装至第二电路板800和第一电路板250中的一者。392.例如,运动传感器820、存储器512和电容器81a可以设置在第二电路板800的第二表面44b上。393.控制器830和电容器81b可以设置在第一电路板250的第一表面60a上。例如,控制器830可以设置在第一电路板250的第一区域s1(参见图12a)中。第一区域s1可以是定位在图像传感器810与第一电路板250的第一侧向侧表面或第一侧部之间的区域。394.第一电路板250的第二区域s2可以设置有布线或数据线,图像传感器810的数据通过这些布线或数据线被传输送至第二电路板800。第一区域s1可以是与第二区域s2关于图像传感器810对置的区域。第二区域s2可以是与第二电路板800的第三区域803相邻的区域。图像传感器810可能敏感地受到由布线或数据线产生的噪声的影响,并且图像传感器810的操作和性能可能因噪声而劣化。395.当控制器830设置在第一电路板250的第二区域s2中时,噪声可能由于控制器830的存在而由布线或数据线产生,从而使图像传感器810的操作和性能劣化。396.例如,设置在第二电路板800处的运动传感器820可以经由支承构件220和连接弹性构件280导电地连接至设置在第一电路板250处的控制器830。397.运动传感器820可以输出关于由相机模块10的运动引起的旋转角速度的信息。运动传感器820可以实施为双轴或三轴陀螺仪传感器或角速度传感器。398.存储器512可以根据线圈架110在光轴方向上的位移来存储代码值,以用于af反馈操作。此外,存储器512可以根据ois可移动单元在与光轴方向垂直的方向上的位移来存储代码值,以用于ois反馈操作。另外,存储器512可以存储用于控制器830的操作的算法或程序。399.例如,尽管存储器512可以是例如eeprom(电可擦除可编程只读存储器),但本公开内容不限于此。400.控制器830可以导电地连接至第一位置传感器170和第二位置传感器240。401.控制器830可以使用存储在存储器512中的第一代码值来控制第一位置传感器170的输出信号和供应至第一线圈120的驱动信号,从而执行反馈自动对焦操作。402.此外,控制器830可以使用存储在存储器512中的第二代码值来控制从第二位置传感器240供应的输出信号和供应至第二线圈230的驱动信号,从而执行反馈ois操作。403.尽管控制器830可以是驱动ic类型的,但本公开内容不限于此。例如,控制器830可以导电地连接至第一电路板250的端子262。404.参照图14,第一电路板250可以包括端子262,端子262导电地连接至连接弹性构件280。第二端子262可以替代性地被称为“第二端子部分”或“第二端子单元”。405.例如,第一电路板250的端子262可以经由焊料或导电粘合构件联接至连接弹性构件270。例如,端子262可以实施为多个端子。406.例如,第一电路板250的第二端子262可以设置在第一电路板250的第二表面(例如,下表面)60b上,并且可以在光轴方向上对应于或面向连接弹性构件270的连接弹簧281。407.第一电路板250的第二端子262可以与对应的连接弹簧281的至少一部分重叠。尽管第一电路板250可以是印刷电路板或柔性印刷电路板(fpcb),但本公开内容在这方面不受限制。408.第一电路板250可以设置在保持器270与连接弹性构件280之间。409.连接弹性构件280可以联接至保持器270。连接弹性构件280可以用于允许ois可移动单元移动并允许信号的导电传输。换句话说,连接弹性构件280可以将支承构件220导电地连接至第一电路板250的端子262。410.例如,连接弹性构件280可以设置在保持器270下方。411.例如,连接弹性构件280可以经由粘合构件联接至保持器270的下表面42b。例如,连接弹性构件280可以联接至保持器270的下表面42b的第一表面36a。412.连接弹性构件280可以将支承构件220导电地连接至第一电路板250,并且可以包括弹性变形部分,该弹性变形部分是可弹性地变形的。连接弹性构件280的弹性变形部分可以联接至支承构件220。413.连接弹性构件280可以包括与支承构件220对应的连接弹簧281。414.例如,连接弹性构件280可以包括多个连接弹簧281。所述多个连接弹簧281可以对应于各个支承构件220。415.多个连接弹簧281可以设置成彼此在导电方面隔离或间隔开。416.连接弹簧281可以由导电材料、例如诸如铜或铜合金的金属制成。417.例如,连接弹簧281可以由选自金(au)、银(ag)、铂(pt)、钛(ti)、锡(sn)、铜(cu)和锌(zn)中的至少一者制成。此外,连接弹性构件280可以由膏体或焊膏制成,该膏体或焊膏包括选自具有优异结合力的金(au)、银(ag)、铂(pt)、钛(ti)、锡(sn)、铜(cu)和锌(zn)中的至少一者。418.例如,连接弹簧281可以由具有抗拉强度为1000兆帕或更高的金属材料制成。例如,连接弹簧281可以由包括铜的二元合金或三元合金制成。419.参照图15至图18,连接弹簧281可以包括:第一联接器31,第一联接器31联接至第一电路板250的端子262;第一联接器32,第二联接器32联接至支承构件220;以及连接器33,连接器33将第一联接器31连接至第二联接器32。420.连接弹簧281的第一联接器31可以由保持器270支承。例如,第一联接器31可以设置在保持器270的下表面42b的第一表面36a上,并且可以由保持器270的下表面42b支承。421.例如,第一联接器31可以邻近保持器270中的至少一个凹槽272设置在保持器270的下表面42b的第一表面36a上。422.例如,第一联接器31可以包括:第一部分31a,第一部分31a由保持器270支承并连接至连接器33;以及第二部分31b,第二部分31b连接至第一部分31a连接并联接至第一电路板250的端子262。423.例如,第一联接器31的第一部分31a可以在光轴方向上与保持器270的下表面42b的第一表面36a重叠,并且可以联接至第一表面36a。424.第一联接器31的第二部分31b可以在光轴方向上不与保持器270的下表面42b重叠。第一联接器31的第二部分31b的至少一部分可以在光轴方向上与第一电路板250的端子262重叠。425.例如,第二部分31b可以从保持器270的内表面沿朝向第一电路板250的端子262的方向突出。426.例如,第一联接器31的第二部分31b可以定位成与下述部分19a相反:在部分19a处,第一联接器31与连接器33相接。427.第一联接器31的第一部分31a的宽度可以大于其他部分32b和33的宽度,以增加与绝缘构件285和保持器270的结合力。428.例如,第一联接器31的第一部分31a的宽度w1可以大于第二部分31b的宽度w2。换句话说,第一联接器31的第一部分31a的表面积可以大于第二部分31b的表面积。这样做的原因是为了相对地增加由保持器270支承的第一部分31的宽度w1(或表面积),以便由保持器270稳定地支承第一部分31a。429.此处,宽度w1和w2可以是第一联接器31在与朝向第一电路板250的端子262的方向垂直的方向上的长度。430.在另一实施方式中,第一部分31a的宽度w1可以等于或小于第二部分31b的宽度w2。431.第二联接器32可以经由焊料902或导电粘合构件联接至支承构件220的一个端部(例如下端部)。432.例如,第二联接器32可以设置成在光轴方向上保持器270中的孔270a重叠。433.第二联接器32可以具有孔32a,支承构件220延伸穿过孔32a。434.支承构件220的穿过第二联接器32中的孔32a的端部可以经由导电粘合构件或焊料902直接联接至第二联接器32,并且第二联接器32可以导电地连接至支承构件220。435.例如,第二联接器32可以包括孔32a和孔32a周围的区域,该区域用作其中供设置焊料902以便将联接器32联接至支承构件220的区域。尽管第二联接器32构造成在图16中具有圆形形状,但本公开内容不限于此。在另一实施方式中,第二联接器32可以构造成具有多边形形状(例如,四边形形状)或椭圆形形状。436.例如,第二联接器32的直径k可以小于第一联接器31的第一部分31a的宽度w1。在另一实施方式中,第二联接器32的直径k可以等于或大于第一联接器31的第一部分31a的宽度w1。437.连接器33可以将第一联接器31的第一部分31a连接至第二联接器32,并且可以包括至少一个线性部分和至少一个弯曲部分。438.例如,弯曲部分可以构造成从垂直于光轴的线性部分向左或向右弯曲地延伸。例如,尽管连接器33可以构造成具有螺旋形状,但本公开内容不限于此。439.例如,连接器33可以包括弯曲部分,该弯曲部分顺时针或逆时针地延伸。换句话说,连接器33可以沿与图像传感器在z轴方向上的旋转对应的方向弯曲。因此,连接器33能够将图像传感器沿z轴方向旋转时对连接弹簧281的损害最小化,其结果是能够防止在连接弹簧281中产生裂缝并防止连接弹簧281与绝缘构件285分离。440.例如,连接器33可以包括:第一线性部分33-1,第一线性部分33-1连接至第一联接器31;第一弯曲部分34-1,第一弯曲部分34-1从第一线性部分33-1沿第一侧向方向弯曲地延伸;第二线性部分33-2,第二线性部分33-2连接至第一弯曲部分34-1;第三弯曲部分34-2,第三弯曲部分34-2从第二线性部分33-2沿第二侧向方向弯曲地延伸;第三线性部分33-3,第三线性部分33-3连接至第三弯曲部分34-2;第三弯曲部分34-3,第三弯曲部分34-3从第三线性部分33-3沿第三侧向方向弯曲地延伸;第四线性部分33-3,第四线性部分33-3连接至第三弯曲部分34-3;第四弯曲部分34-4,第四弯曲部分34-4从第四线性部分33-4沿第四侧向方向弯曲地延伸;以及第五线性部分33-5,第五线性部分33-5将第四弯曲部分34-4连接至第二联接器32。例如,尽管第一侧向方向至第四侧向方向中的每一者都可以是向左方向,但本公开内容不限于此。在另一实施方式中,第一侧向方向至第四侧向方向中的至少一者可以是向右方向。441.连接器33的弯曲部分34-1至34-5中的至少一者可以构造成具有圆形形状。442.第一线性部分33-1至第五线性部分33-5中的每一者的宽度可以与第一弯曲部分34-1至第四弯曲部分34-5中的每一者的宽度不同。例如,由于应力集中在弯曲部分中,因此第一弯曲部分34-1至第四弯曲部分34-5中的每一者的宽度可以大于第一线性部分33-1至第五线性部分33-5中的每一者的宽度,从而防止由施加至连接器33的应力引起的对连接器33的损害。443.连接弹簧281可以在其不同部分处具有不同的宽度。444.连接器33的宽度可以小于第一部分33的宽度,以便施加弹性力。445.连接器33的宽度w3可以小于第一联接器31的第一部分31a的宽度w1、第一联接器31的第二部分31b的宽度w2、以及第二联接器32的直径k中的任一者。因此,连接弹簧281能够灵活地支承ois可移动单元,并且允许ois可移动单元沿垂直于光轴的方向容易地移动。446.例如,连接器33可以具有20μm至1000μm的宽度。447.例如,如果连接器33的宽度小于20μm,则连接弹簧281的整体刚度可能会降低,并且因此连接弹簧281的可靠性可能会降低。同时,如果连接器33的宽度大于100μm,则连接弹簧281的弹性力可能会降低,并且因此激活构造成使ois可移动单元移位的第二线圈230所需的电压可能会增加,从而增加功耗。448.在另一实施方式中,连接器33的宽度可以等于或大于第二联接器32的直径k。449.第一联接器31的厚度t1、连接器32的厚度t2和第二联接器32的厚度可以相同。在另一实施方式中,第一联接器31的厚度t1、连接器32的厚度t2和第二联接器32的厚度中的至少一者可以与其余的厚度不同。例如,连接器32的厚度t2可以小于第一联接器31的厚度和第二联接器32的厚度。450.第二联接器32和连接器33可以在光轴方向上与保持器270中的凹槽272重叠。例如,第二联接器32和连接器33可以设置在保持器270中的凹槽272中。例如,第二联接器32和/或连接器33可以设置成与保持器270间隔开。451.参照图15和图16,连接弹性构件280可以包括多个连接弹簧。多个连接弹簧可以被分类成多个组。例如,多个组可以替代性地被称为“多个连接器”、“多个弹性部分”或“多个连接弹性构件”。452.例如,连接弹性构件280可以包括与第一电路板250的四个侧部部分(四个侧向侧表面)或保持器270的四个侧部部分(或四个侧向侧表面)对应的四个组1a至4a。453.多个组1a至4a中的每个组可以包括多个连接弹簧1-1至1-9、2-1至2-9、3-1至3-9、或4-1至4-9。454.此外,第一电路板250的端子262可以被分类成与连接弹性构件280的组1a至4a对应的多个组。第一电路板250的多个组中的每个组可以包括多个端子p1至p9、s1至s9、r1至r9、或q1至q9。455.例如,第一电路板250的多个端子p1至p9、s1至s9、r1至r9和q1至q9中的每一者可以经由焊料联接至多个连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9中的对应的一者。456.例如,包括在多个组1a至4a中的连接弹簧的数目可以相同。457.在另一实施方式中,包括在彼此相对定位的两个组中的连接弹簧的数目可以相同。458.在另一实施方式中,包括在连接弹性构件280的两个相邻组中的连接弹簧的数目可以彼此不同。在另一实施方式中,包括在多个组1a至4a中的至少一个组中的连接弹簧的数目可以与包括在其余组中的每个组中的连接弹簧的数目不同。459.例如,为了在平衡状态下灵活地支承ois可移动单元,连接弹性构件280的多个组1a至4a可以设置成关于中心点403双径向对称。460.在另一实施方式中,连接弹性构件280的多个组1a至4a可以设置成关于中心点403四径向对称。461.例如,保持器270可以包括四个拐角30a至30d。第一组1a和第三组3a可以设置成在横向方向上彼此相对,并且第二组2a和第四组4a可以设置成在纵向方向上彼此相对。横向方向和纵向方向可以彼此相交。462.第一组1a可以在第一拐角30a与第二拐角30b之间设置在保持器270的第二表面70b的第一区域中,并且第二组1a可以在第二拐角30b与第三拐角30c之间设置在保持器270的第二表面70b的第二区域中。第三组3a可以在第三拐角30c与第四拐角30d之间设置在保持器270的第二表面70b的第三区域中,并且第四组4a可以在第四拐角30d与第一拐角30a之间设置在保持器270的第二表面70b的第四区域中。463.保持器270的第一拐角30a和第三拐角30c可以定位成在第一对角线方向上彼此相对,并且保持器270的第二拐角30b和第四拐角30d可以定位成在第二对角线方向上彼此相对。第一对角线方向和第二对角线方向可以彼此垂直。464.第一组1a和第三组3a的中心可以定位成相对于第一中心线401在相反方向上偏离,并且第二组2a和第四组4a的中心可以定位成相对于第二中心线402在相反方向上偏离。465.此处,每个组的中心可以是包括每个组在该组中所包括的连接弹簧被布置所沿的方向上的总长度的空间中心。总长度可以是每个组中的第一个连接弹簧与最后一个连接弹簧之间的距离。466.例如,第一中心线401可以是延伸穿过中心403并且平行于从保持器270的其中设置有第一组1a的第一区域朝向保持器270的其中设置有第三组3a的第三区域的方向的线。替代性地,第一中心线401可以是延伸穿过中心403并且平行于保持器270的第一外表面的线。467.例如,第二中心线402可以是延伸穿过中心403并且平行于从保持器270的其中设置有第二组的第二区域朝向保持器270的其中设置有第四组的第四区域的方向的线。替代性地,第二中心线402可以是延伸穿过中心403并且垂直于保持器270的第一外表面的线。468.例如,中心403可以是保持器270中的孔70的中心、第一电路板250的中心、或连接弹性构件的空间中心。469.例如,设置在第一中心线401的一侧(例如,右侧)处的第一组1a(或第三组3a)的连接弹簧的数目和设置在第一中心线401的另一侧(例如,左侧)处的第一组1a(或第三组3a)的连接弹簧的数目可以彼此不同。470.例如,设置在第二中心线402的一侧(例如,右侧)处的第二组2a(或第四组4a)的连接弹簧的数目和设置在第二中心线402的另一侧(例如,左侧)处的第二组2a(或第四组4a)的连接弹簧的数目可以彼此不同。471.参照图16,连接弹性构件280还可以包括绝缘构件285。绝缘构件285可以替代性地被称为“绝缘层”。例如,绝缘构件285可以包括聚酰亚胺。472.绝缘构件285可以环绕连接弹簧281的至少一部分。例如,绝缘构件285可以环绕连接弹簧281的第一部分31a的至少一部分。例如,连接弹簧281的第一部分31a的上表面可以联接至保持器270的下表面42a的第一表面36a,并且绝缘构件285可以覆盖连接弹簧281的第一部分31a的下表面。473.粘合构架可以被置于或设置在绝缘构件285与连接弹簧281之间以及绝缘构件285与虚设构件28-1至28-4之间,以便将它们彼此附接。474.例如,连接弹簧281的第一联接器31的第二部分31a、第二联接器32和连接器33可以从绝缘构件285暴露。475.绝缘构件285可以将组1a至4a的连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9彼此连接。476.绝缘构件285可以对连接弹性构件280的连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9进行支承,并且可以联接或附接至保持器270的下表面42b的第一表面36a。477.连接弹性构件280还可以包括一个或更多个虚设构件28-1至28-4。478.例如,虚设构件28-1至28-4可以与连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9间隔开,并且可以设置在保持器270的下表面42b上。479.绝缘构件285可以环绕或覆盖虚设构件28-1至28-4的至少一部分。因此,可以牢固地保持绝缘构件285的形状,以提高绝缘构件285与保持器270之间的粘合力。480.虚设构件28-1至28-4可以替代性地被称为“增强部分”或“增强图案”,因为它们增强了连接弹性构件280的刚度。481.虚设构件28-1至28-4中的每一者可以经由粘合剂联接至保持器270的下表面42b,并且可以具有至少一个通孔28a或凹槽,以便增加虚设构件与保持器270之间的联接力。482.虚设构件28-1至28-4可以不与连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9导电地连接。尽管虚设构件28-1至28-4不彼此导电地连接,但本公开内容不限于此。在另一实施方式中,虚设构件可以彼此连接。483.例如,绝缘构件285可以在其中具有孔或腔。例如,尽管绝缘构件285可以构造成从上面看时具有多边形的形状,例如整体上呈四边形的环形形状,但本公开内容不限于此。484.例如,尽管连接弹性构件280可以包括四个虚设构件28-1至28-4,但虚设构件的数目不限于此。在另一实施方式中,虚设构件的数目可以是大于或等于1的任何数目。485.例如,虚设构件28-1至28-4中的每一者可以设置在连接弹性构件280的两个相邻组1a和2a、2a和3a、3a和4a、或4a和1a之间。486.例如,连接弹性构件280可以包括设置在绝缘构件285的在第一组1a与第二组2a之间的第一拐角或第一拐角区域处的虚设构件28-3、设置在绝缘构件285的在第二组2a与第三组3a之间的第二拐角或第二拐角区域处的虚设构件28-2、设置在绝缘构件285的在第三组3a与第四组4a之间的第三拐角或第三拐角区域处的虚设构件28-1、以及设置在绝缘构件285的在第四组4a与第一组1a之间的第四拐角或第四拐角区域处的虚设构件28-4。487.虚设构件28-1至28-4中的每一者可以具有构造成避免与保持器270的突起275发生空间干涉的避让部分。尽管避让部分27a可以构造成具有凹槽或孔的形式,但本公开内容不限于此。488.参照图16,绝缘构件285可以包括本体85a和延伸部85b,本体85a设置在连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9的第一联接器31的第一部分31a、保持器270的下表面43b的一部分以及虚设构件28-1至28-4的一些部分上,延伸部85b朝向虚设构件28-1至28-4的其他部分延伸。489.例如,绝缘构件285的本体85a可以邻近保持器270中的孔70设置在保持器270的下表面42b的第一表面36a上,并且可以构造成具有环的形式,该环具有闭合曲线形状。例如,尽管本体85a可以构造成具有四边形环的形式,但本公开内容不限于此。在另一实施方式中,本体85a可以构造成具有圆形或多边形环的形式。490.例如,本体85a可以在其中具有孔或腔,该孔或腔在光轴方向上与第二电路板800中的孔800a和保持器270中的孔对应、重叠或对准。491.尽管延伸部85b可以构造成具有线性形状,但本公开内容不限于此。在另一实施方式中,延伸部85b可以构造成具有线性形状和弯曲形状中的至少一者。例如,延伸部85b可以包括多个延伸部,所述多个延伸部可以设置成彼此间隔开。例如,延伸部85b可以从本体85a朝向保持器270的外表面延伸。例如,延伸部可以设置成环绕保持器270中的凹槽272。492.延伸部85b可以用于增加与虚设构件28-1至28-4中的每一者的接触面积,从而进一步增加连接弹性构件280的刚度。493.支承构件220可以将第二电路板800导电地连接至连接弹性构件280。494.支承构件200可以包括与连接弹性构件280的组1a至4a对应的多组支承构件。多个组中的每个组可以包括多个支承构件(或布线)。495.例如,支承构件200可以包括与多个连接弹簧对应的多个支承构件。支承构件可以替代性地被称为“布线”。496.支承构件220可以在其一个端部处联接至第二电路板800,并且在其另一个端部处联接至连接弹簧281的第二联接器32。497.例如,支承构件220的一个端部可以通过第二电路板800中的孔800b经由第一焊料901联接至第二电路板800的第一表面(例如,上表面)44a。例如,支承构件220的一个端部可以联接并导电地连接至第二电路板800的端子800b。498.支承构件220的另一个端部可以通过第二联接器32中的孔32a经由第二焊料902联接至连接弹簧281的第二联接器32的下部部分或下表面。499.支承构件220可以延伸穿过壳体450中的避让区域和保持器270中的孔270a,从而避免与壳体450和保持器270发生空间干涉。500.支承构件220中的每一者可以实施为是导电的并提供弹性支承的构件,例如,悬线、板簧或螺旋弹簧。501.图像传感器单元350还可以包括滤光器610。图像传感器单元350还可以包括滤光器保持器600,滤光器610设置、坐置或接纳在滤光器保持器600中。滤光器保持器600可以替代性地被称为“传感器基座”。502.滤光器610可以用于防止穿过透镜镜筒400的特定频带内的光被引入到图像传感器810中。503.滤光器610可以是例如红外光阻隔滤光器,但不限于此。例如,滤光器610可以定向成与垂直于光轴oa的x-y平面平行。504.滤光器610可以设置在透镜模块400下方。505.滤光器保持器600可以设置在af操作单元100下方。例如,滤光器保持器600可以设置在第一电路板250上。506.滤光器保持器600可以联接至第一电路板250的第一表面60a的环绕图像传感器810的区域,并且可以通过第二电路板800中的孔800a和保持器270中的孔70暴露。例如,滤光器保持器600可以通过第二电路板800中的孔800a和保持器270中的孔70暴露。507.例如,滤光器保持器600可以联接至第一表面(例如,上表面)的环绕第一电路板250的坐置区域260a的区域。尽管坐置区域域260a是与图12a中的第一电路板250的第一表面60a相同的表面,但本公开内容不限于此。在另一实施方式中,坐置区域260a可以是凹槽或突起。508.在另一实施方式中,滤光器保持器600可以联接至保持器270或af操作单元100。509.保持器270中的孔70可以使设置在第一电路板250处的滤光器保持器600和穿过孔70设置在滤光器保持器600处的滤光器610暴露。510.滤光器保持器600可以在其中具有孔61a,孔61a形成在滤光器保持器600的安装或设置有滤光器610的区域中,以便允许已经穿过滤光器610的光进入图像传感器810。滤光器保持器600中的孔61a可以构造成具有通孔的形式,该通孔在光轴方向上穿过滤光器保持器600形成。例如,滤光器保持器600中的孔61a可以穿过滤光器保持器600的中心形成,并且可以定位成对应于或面向图像传感器810。511.滤光器保持器600可以具有坐置部分500,滤光器610坐置在坐置部分500中。滤光器610可以设置、坐置或安装在坐置部分500中。坐置部分500可以形成为环绕孔61a。在另一实施方式中,滤光器保持器600的坐置部分500可以构造成具有从滤光器610的上表面突出的突起的形式。512.图像传感器单元350还可以包括设置在滤光器610与坐置部分500之间的粘合构件612,并且滤光器610可以经由粘合构件612联接或附接至滤光器保持器600。513.图像传感器单元350还可以包括设置在滤光器保持器600与第一电路板250之间的粘合构件61,并且滤光器保持器600可以经由粘合构件61联接或附接至第一电路板260。514.例如,粘合构件612和61可以是环氧树脂、热硬化粘合剂或紫外线硬化粘合剂。515.相机模块10还可以包括盖构件300、基座210和底盖219中的至少一者,以便在其中容纳af操作单元100和图像传感器单元350,以保护af操作单元100和图像传感器单元350免受外部冲击并防止引入外部异物。516.盖构件300可以构造成具有盒子的形式,该盖构件300在底部处敞开,并且包括上板301和侧板302。盖构件300的侧板302可以联接至af操作单元100的壳体140的外表面。在另一实施方式中,盖构件300的侧板302的下部部分可以联接至基座210。517.盖构件300的上板301可以构造成具有多边形形状,例如,四边形形状、八边形形状等。盖构件300可以在其中具有孔303,孔303穿过上板301形成,以便将联接至线圈架110的透镜(未示出)暴露于外部光。盖构件300的侧板302中的一个侧板可以设置有凹槽304,电路板910的端子构件95通过凹槽304暴露。518.基座210可以设置在保持器270下方。基座210可以构造成具有与盖构件300、壳体450或保持器270的形状一致或对应的形状,例如四边形形状。519.例如,基座210可以包括设置在保持器270下方的下板210a和从下板210a朝向第二电路板800延伸的侧板210b。基座210可以具有穿过下板210a形成的孔210c。520.基座210中的孔210c可以是沿光轴方向穿过基座210形成的通孔。在另一实施方式中,基座210可以在其中不具有孔210c。521.例如,基座210的侧板210b可以联接至壳体450。在另一实施方式中,基座210的侧板210b可以联接至盖构件300的侧板302。522.底盖219可以设置在基座210下方,以便封闭基座210中的孔210c。在另一实施方式中,可以省去底盖219。523.在下文中,将关于ois操作来描述图像传感器单元350的固定部分(例如,“ois固定部分”)和可移动部分(例如,“ois可移动部分”)。524.图像传感器单元350可以包括ois固定部分、ois可移动部分以及联接至这两个部分以便将这两个部分彼此连接的弹性支承构件220和280。ois可移动部分可以相对于ois固定部分沿垂直于光轴oa的方向移动。弹性支承构件220和280可以替代性地被称为“支承构件”或“弹性构件”。525.设置在ois固定部分下方的ois可移动部分可以借助于弹性支承构件220和280与ois固定部分间隔开预定距离。具体地,ois可移动部分可以经由支承构件220和连接弹性构件280、通过由磁体23与线圈230之间的相互作用产生的电磁力而相对于ois固定部分移动。526.弹性支承构件220和280的一个端部(例如,支承构件220的一个端部)可以联接至第二电路板800,并且弹性支承构件220和280的另一个端部(例如,连接弹簧281的第一部分31)可以联接至第一电路板250。527.第二电路板800和第一电路板250可以经由弹性支承构件220和280彼此导电地连接。528.通过第二线圈230与磁体23之间的相互作用而产生的电磁力,ois可移动部分可以相对于ois固定部分沿垂直于光轴的方向移动。529.例如,通过磁体23与第二线圈230之间的相互作用,图像传感器810可以沿垂直于光轴oa的方向移位或倾斜,或者可以绕光轴oa旋转。例如,光轴方向可以是与图像传感器810的一个表面垂直的方向。例如,图像传感器810的一个表面可以是图像传感器810的上表面。替代性地,图像传感器810的一个表面可以是对应于或面向透镜模块400或滤光器610的下表面的表面。例如,图像传感器810的一个表面可以是活动区域。530.借助支承构件220和连接弹性构件280,ois可移动部分可以被弹性地支承,并且可以沿垂直于光轴的方向移动。531.ois固定部分可以包括第二电路板800、壳体450和磁体23。此外,ois固定部分可以包括基座210、盖构件300和底盖219中的至少一者。此外,ois固定部分可以包括联接至第二电路板800的元件,例如,运动传感器820和电容器81a。532.ois可移动部分可以包括第一电路板250、保持器270、第二线圈230和图像传感器810。533.此外,ois可移动部分可以包括联接至第一电路板250的元件,例如,第二位置传感器240、控制器830、存储器512和电容器81b。此外,ois可移动部分可以包括滤光器保持器600和滤光器610。534.例如,ois可移动部分可以包括:第一电路板250,第一电路板250联接至连接弹性构件280;保持器270,保持器270联接至第一电路板260;以及图像传感器810,图像传感器810设置在第一电路板250处,并且可以由支承构件220和连接弹性构件280弹性地支承。535.磁体23可以设置在ois固定部分处,并且第二线圈230可以设置在ois可移动部分处。借助磁体23与第二线圈230之间的相互作用,ois可移动部分可以相对于ois固定部分移动或倾斜。536.参照图19a,为了利用由磁体23与第二线圈230之间的相互作用而产生的电磁力使ois可移动部分相对于ois固定部分移动和倾斜,ois可移动部分可以与ois固定部分间隔开。537.例如,第一电路板250和图像传感器800(801)可以与第二电路板800、壳体450和基座210间隔开。538.例如,在ois可移动部分的初始位置处,保持器270的外表面可以与基座210的内表面间隔开预定距离d1。539.此外,例如,在ois可移动部分的初始位置处,保持器270的下表面和第一电路板250的下表面可以与基座210的前表面(或上表面)间隔开预定距离h1。此外,在ois可移动部分的初始位置处,保持器270的下表面和第一电路板250的下表面可以与底盖219的前表面(或上表面)间隔开。540.此外,在ois可移动部分的初始位置处,焊料902可以与基座210的前表面(或上表面)间隔开预定距离。541.ois可移动部分的初始位置可以是在没有电力施加至第二线圈230的状态下ois可移动部分的初始位置,或者是作为支承构件220和连接弹性构件280仅由于ois可移动部分的重量而弹性变形的结果的ois可移动部分所处的位置。542.另外,ois可移动部分的初始位置可以是当重力沿从第二电路板800至第一电路板250的方向作用时或当重力沿从第一电路板250至第二电路板800的方向作用时ois可移动部分所处的位置。543.图像传感器810可以是电荷耦接设备(ccd)、金属氧化物半导体(mos)、cpd图像传感器和cid图像传感器中的任一者,但不限于此。544.尽管第一电路板250在实施方式中可以实施为单个电路板,但本公开内容不限于此。在另一实施方式中,第一电路板可以包括第三板和第四板,第三板和第四板中的每一者可以包括构造成彼此导电地连接的附加端子,并且连接弹性构件280的第一联接器31可以导电地连接至第三板和第四板中的一者。545.图22图示了根据另一实施方式的连接弹性构件280-1。546.参照图22,连接弹性构件280-1可以包括板部分280a和弹性部分280b。板部分280a可以替代性地被称为“板构件”、“电路板”、“板”或“电路构件”。547.板部分280a可以包括与第一电路板250的端子262对应的多个端子41。548.板部分280a可以在其中具有与保持器270中的孔70对应的孔79。板部分280a中的孔79可以是通孔,该通孔沿光轴方向穿过板部分280a形成。549.例如,板部分280a中的孔79可以暴露第一电路板250的第二表面60b,并且可以暴露第一电路板250的端子262。550.板部分280a的端子41可以包括第一部分41a和第二部分41b。端子41的第一部分41a可以设置在板部分280a中,并且端子41的第二部分41b可以从板部分289a暴露于外部,并且可以经由焊料联接至第一电路板250的端子262。551.板部分280a可以设置在保持器270的下表面42b的第一表面36a上,并且可以经由粘合构件联接或附接至保持器270的下表面42b的第一表面36a。552.例如,板部分280a可以实施为印刷电路板或柔性印刷电路板(fpcb)。553.弹性部分280b可以从板部分280a暴露,并且可以连接至板部分280a的端子41。554.弹性部分280b可以包括联接至支承构件220的联接器32a和将联接部分32a连接至端子41的连接器33a。555.弹性部分280b和板部分280a的端子41可以对应于图18中所示的连接弹簧281。556.例如,端子41的第一部分41a可以对应于图18中所示的连接弹簧281的第一部分31a,并且端子41的第二部分41b可以对应于图18中所示的连接弹簧281的第二部分31b。对连接弹簧281的第一部分31a和第二部分31b的描述可以在修改或未修改的情况下适用于端子41的第一部分41a和第二部分41b。557.此外,弹性部分280b的联接器32a可以对应于图18中所示的连接弹簧281的第二联接器32,并且弹性部分280b的连接器33a可以对应于图18中所示的连接弹簧281的连接器33。对连接弹簧281的第二联接器32和连接器33的描述可以在修改或未修改的情况下适用于弹性部分280b的联接器32a和连接器33a。558.对图15和图16中所示的连接弹性构件280的组1a至4a的描述可以在修改或未修改的情况下适用于图24中所示的连接弹性构件280-1。559.板部分280a可以包括图15和图16中所示的虚设构件28-1至28-4,并且对虚设构件28-1至28-4的描述可以在修改或未修改的情况下适用于板部分280a的虚设构件。560.图23是根据本发明的另一实施方式的相机模块20的分解立体图。图23中的与图2中的附图标记相同的附图标记表示相同的部件,并且简要地给出或省去对相同部件的描述。561.参照图23,相机模块20可以包括透镜模块400和图像传感器单元350。562.图23中所示的相机模块20的透镜模块400可以或不可以沿光轴方向移动,并且可以沿光轴方向固定。563.此外,图23中所示的透镜模块400可以或不可以沿垂直于光轴oa的方向移动,并且可以沿垂直于光轴oa的方向固定。564.相机模块20还可以包括图2中所示的盖构件300。565.例如,透镜模块400可以联接、附接或固定至保持器600和第二电路板800。例如,透镜模块400的下部部分、下端部或下表面可以联接、附接或固定至保持器600的上表面或第二电路板800的上表面。566.此外,透镜模块400可以联接、附接或固定至盖构件300。567.随着相机技术的发展,图像的分辨率变高,并且因此图像传感器的尺寸增加。由于图像传感器的尺寸增加,透镜模块的尺寸和用于使透镜模块移动的致动器的尺寸也增加。因此,不仅透镜模块的重量,而且用于使透镜模块移动的其他致动器部件的重量也增加。568.根据本发明的实施方式,使用以透镜移位的方式操作的af操作单元(或第一致动器)100执行自动对焦,并且使用以图像传感器移位的方式操作的图像传感器单元(或第二致动器)350执行光学图像稳定(ois),从而提高相机设备的可靠性。569.该实施方式能够利用传感器移位的方式执行5轴手抖动校正。例如,5轴手抖动可以包括两个角度手抖(例如,俯仰和偏转)、两个移位手抖动(例如,x轴移位和y轴移位)、以及一个旋转手抖动(例如,滚动)。570.图24图示了根据实施方式的磁体23a、ois线圈单元230-1、ois位置传感器240a、保持器270和第一电路板250的布置。图25图示了根据比较示例的磁体60、ois线圈单元40、ois位置传感器50、第一电路板30和保持器30的布置。571.在图25中所示的比较示例中,ois线圈单元40和ois位置传感器50可以设置或安装在第一电路板30的第一表面(例如,上表面)上。保持器20可以设置在第一电路板30下方。572.ois线圈单元40可以具有在形成其中央中的开口或孔,并且ois位置传感器50可以设置在ois线圈单元40中的开口或保持器中。ois位置传感器50可以在垂直于光轴的方向或与第一电路板30的上表面平行的方向上与ois线圈单元40重叠。换句话说,ois线圈单元50和ois位置传感器50可以设置成与第一电路板30的第一表面(例如,上表面)相邻。573.当将驱动信号施加至ois线圈单元40以进行ois操作时,可以从ois线圈单元40产生磁场。为了执行准确的ois反馈操作,ois位置传感器50必须输出与仅由固定至ois固定部分的磁体60产生的磁场的检测结果对应的输出。然而,由于ois线圈单元40和ois位置传感器50在图25中所示的比较示例中彼此相邻地设置,因此ois位置传感器50的输出可能受到由ois线圈单元40产生的磁场的极大影响,从而使ois反馈操作的准确性和可靠性劣化。574.此外,由于ois位置传感器50和ois线圈单元40在垂直于光轴的方向上彼此重叠,因此ois位置传感器50的输出可能受到由ois线圈单元40产生的磁场的极大影响,从而使ois反馈操作的准确性和可靠性劣化。575.图26图示了关于输入至ois线圈单元40的驱动信号和ois位置传感器50的输出的频率响应特性。在图26中,x轴指示频率,并且y轴指示增益。g1指示关于增益的频率响应特性。576.参照图26,由于由从ois线圈单元40产生的磁场引起的影响,可能存在这样的现象38a,即ois位置传感器50的输出在某个频率范围内(例如,200hz至300hz)异常地减小。由于这种现象38a,ois反馈操作的可靠性可能劣化。577.与此相反,在图24中所示的实施方式中,ois位置传感器(例如,240a)可以设置在ois线圈单元(例如,230-1)下方,并且ois位置传感器(例如,240a)和ois线圈单元(例如,230-1)可以在垂直于光轴的方向上或在与第一电路板250的上表面平行的方向上不彼此重叠。578.例如,磁体23a与ois线圈单元230-1在光轴方向上的距离d12可以在0.05mm至0.2mm的范围内。例如,d12可以在0.1mm至0.18mm的范围内。具体地,d12可以在0.12mm至0.15mm的范围内。579.此外,例如,ois线圈单元230-1在光轴方向上的长度d13可以在0.1mm至0.5mm的范围内。具体地,d13可以在0.2mm至0.4mm的范围内。更具体地,d13可以在0.25mm至0.3mm的范围内。580.例如,磁体23a与ois位置传感器(例如,240a)之间在光轴方向上的距离d11可以在0.25mm至0.8mm的范围内。具体地,d11可以在0.3mm至0.5mm的范围内。更具体地,d11可以在0.35mm至0.47mm的范围内。581.如果d11大于0.8mm,则由ois位置传感器240a检测到的磁体23a的磁场的强度可能衰减,并且因此ois位置传感器240a的灵敏度可能会劣化。582.如果d11小于0.25mm,则必须减小ois线圈单元230-1在光轴方向上的长度d13,以防止ois线圈单元和ois位置传感器在垂直于光轴的方向上彼此重叠。在这种情况下,由ois线圈单元与磁体之间的相互作用而产生的电磁力可能会减小。583.同时,ois位置传感器240a的厚度d14可以在0.2mm至0.4mm的范围内。具体地,d14可以在0.23mm至0.3mm的范围内。584.例如,保持器270的上板的厚度d15可以在0.2mm至0.3mm的范围内。具体地,d15可以在0.2mm至0.25mm的范围内。例如,d15可以是保持器270的上表面42a与保持器270的下表面42b的第二表面36b之间的距离。585.例如,ois线圈单元230-1的下表面(或端部)与ois位置传感器240a的上表面之间的距离(在下文中,被称为“第一距离”)可以在0.01mm至0.2mm的范围内。具体地,第一距离可以在0.02mm至0.1mm的范围内。更具体地,第一距离可以在0.02mm至0.05mm的范围内。586.如果第一距离大于0.2mm,则ois位置传感器240a与磁体23a之间的距离可能过度地增加,并且ois位置传感器240a的输出可能降低,从而降低灵敏度。如果第一距离小于0.01mm,则ois位置传感器240a的输出受ois线圈单元230-1的磁场影响的程度可能随着第一距离的增加而增加。然而,ois位置传感器240a的输出受ois线圈单元230-1的磁场影响的程度可能小于图26中所示的比较示例中的程度。587.在另一实施方式中,ois线圈单元230-1的下表面(或下端部)和ois位置传感器240a的上表面可以彼此齐平,并且第一距离可以为零。588.与比较示例相比,ois位置传感器240a可以与ois线圈单元230-1间隔开更大距离,并且可以在垂直于光轴的方向上不与ois线圈单元230-1重叠。因此,根据本发明的实施方式,可以抑制或减少由ois线圈单元40的磁场对ois位置传感器的输出的影响,并且可以确保ois反馈操作的准确性和可靠性。589.图27图示了根据图24中所示的实施方式的关于输入至ois线圈单元230-1的驱动信号和ois位置传感器240a的输出的频率响应特性。在图27中,x轴指示频率,并且y轴指示增益。g2指示关于增益的频率响应特性。在下文中,图26中的频率响应被称为“情况1”,并且图27中的频率响应特性被称为“情况2”。590.在情况2中,在情况1中出现的现象38a减弱或不出现(38b)。591.在情况1中,由于受到ois线圈单元40的磁场影响,发现在200hz至300hz范围内的增益异常地降低(大约-47db)。因此,ois反馈操作的可靠性可能劣化。592.相反,由于ois线圈单元230-1的磁场的影响被减弱或衰减,发现在200hz至300hz范围内的增益与case1中的增益相比增加得较多(约-37db)。换句话说,由于ois线圈单元230-1的磁场的影响被减弱或衰减,因此可以获得正常的频率响应特性。593.根据本发明的实施方式,由于由ois线圈单元230-1的磁场对ois位置传感器240a的输出的影响被减少,因此可以提高ois位置传感器240a相对于磁体23a的磁场的识别率。因此,可以防止图26中所示的现象38a的发生,并且可以以高精确度和可靠性执行ois反馈操作。因此,可以确保由相机模块的手抖动校正的可靠性。594.对图23至图27的描述可以在修改或未修改的情况下应用于线圈单元230-2至230-4、ois位置传感器240b和240c、以及磁体23b至23d。595.图28是根据实施方式的相机模块1010的立体图。图29是图28中所示的相机模块1010的分解立体图。图30是移除了盖构件1300的图28中所示的相机模块的组装立体图。图31是图29中所示的af操作单元1100的分解立体图。图32是图31中所示的线圈架1110、感测磁体1180、平衡磁体1185、第一线圈1120、电路板1190、第一位置传感器1170和电容器1195的立体图。图33是线圈架1110、壳体1140和电路板1190的立体图。图34是壳体1140、线圈架1110、下弹性构件1160、磁体1130和电路板1190的底部立体图。596.参照图28至图34,相机模块1010可以包括af操作单元1100和图像传感器单元1350。597.相机模块1010可以包括盖构件1300、透镜模块1400和基座1210中的至少一者。盖构件1300和基座1210可以限定外壳。598.af操作单元1100可以联接至透镜模块1400,以便使透镜模块1400沿光轴oa的方向或沿平行于光轴oa的方向移动,并且可以执行相机模块1010的自动对焦功能。599.图像传感器单元1350可以包括图像传感器1810。图像传感器单元1350可以使图像传感器1810沿垂直于光轴的方向移动,并且可以使图像传感器1810绕光轴倾斜或旋转。可以使用图像传感器单元1350执行相机模块1010的手抖动校正。600.例如,图像传感器1810可以绕x轴、y轴和z轴中的至少一者进行旋转。601.例如,图像传感器1810可以沿x轴方向、y轴方向和z轴方向中的至少一个方向移动。602.例如,图像传感器1810可以相对于x轴、y轴和z轴中的至少一者倾斜。603.af操作单元1100可以替代性地被称为“透镜移动单元”或“透镜移动装置”。替代性地,af操作单元1100可以替代性地被称为“第一致动器”或“af驱动单元”。604.对于ois(光学图像稳定)操作,可以由图像传感器单元1350使图像传感器1810而不是使透镜模块1400沿垂直于光轴的方向移动。605.图像传感器单元1350可以替代性地被称为“图像传感器移动单元”、“图像传感器移位单元”、“传感器移动单元”或“传感器移位单元”。替代性地,图像传感器单元1350可以替代性地被称为“第二致动器”或“ois驱动单元”。606.参照图31,af操作单元1100可以包括线圈架1110、第一线圈1120、磁体1130和壳体1140。607.af操作单元1100还可以包括上弹性构件1150和下弹性构件1160。608.对于af反馈操作,af操作单元1100可以包括第一位置传感器1170、电路板1190和感测磁体1180。af操作单元1100还可以包括平衡磁体1185和电容器1195中的至少一者。609.线圈架1110可以设置在壳体1140中,并且可以通过第一线圈1120与磁体1130之间的电磁作用沿光轴oa的方向或沿第一方向(例如,沿z轴方向)移动。610.线圈架1110可以具有孔,透镜模块1400联接或安装至该孔。例如,线圈架1110中的孔可以是沿光轴方向穿过线圈架1110形成的通孔,并且可以具有圆形形状、椭圆形形状或多边形形状,但不限于此。611.透镜模块1400可以包括至少一个透镜和/或透镜镜筒。612.例如,透镜模块1400可以包括一个或更多个透镜和接纳所述一个或更多个透镜的透镜镜筒。然而,透镜模块的构造并不限于透镜镜筒。透镜模块可以具有任何构造,只要该构造能够支承一个或更多个透镜即可。613.例如,透镜模块1400可以例如与线圈架1110螺纹接合。替代性地,透镜模块1400可以经由粘合剂(未示出)联接至线圈架1110。已经穿过透镜模块1400的光可以通过滤光器1610辐射至图像传感器1810。614.线圈架1110可以包括形成在其外表面上的突起1111。615.例如,尽管突起1111可以沿与垂直于光轴oa的线平行的方向突出,但本公开内容不限于此。616.线圈架1110的突起1111可以对应于壳体1140中的凹槽部分1025a,并且可以配装或设置在壳体1140中的凹槽部分1025a中,以便抑制或防止线圈架1110绕光轴旋转超出预定范围。此外,突起1111可以用作止挡部,该止挡部构造成响应于外部冲击等使线圈架1110仅沿光轴方向(例如,沿从上弹性构件1150朝向下弹性构件1160的方向)在预定范围内移动。617.线圈架1110可以具有形成在其上表面中以便避免与上弹性构件1150的第一连接器1153发生空间干涉的第一避让凹槽1112a。此外,线圈架1110可以具有形成在其下表面中以便避免与下弹性构件1160的第二框架连接器1163发生空间干涉的第二避让凹槽1112b。618.线圈架1110可以包括第一联接器1116a,第一联接器1116a构造成联接或固定至上弹性构件1150。例如,尽管线圈架1110的第一联接器1116a可以构造成具有平坦形状,但本公开内容不限于此。在另一实施方式中,第一联接器1116a可以采取突起或凹槽的形式。619.线圈架1110可以包括第二联接器1116b,第二联接器1116b构造成联接和固定至下层弹性构件1160。例如,尽管第二联接器1116b可以构造成具有平坦形状,但本公开内容不限于此。在另一实施方式中,第二联接器1116b可以采取突起或凹槽的形式。620.参照图32,线圈架1110的外表面可以具有形成在其中的凹槽,第一线圈1120坐置、配装或设置在该凹槽中。线圈架1110中的凹槽可以具有与第一线圈1120的形状对应的形状,即,闭合曲线形状(例如,环形形状)。621.线圈架1110可以在其中设置有第一坐置凹槽,感测磁体1180坐置、配装、固定或设置在该第一坐置凹槽中。此外,线圈架1110的外表面可以设置有第二坐置凹槽,平衡磁体1185坐置、配装、固定或设置在该第二坐置凹槽中。例如,线圈架1110中的第一坐置凹槽和第二坐置凹槽可以形成在线圈架1110的面向彼此的外表面中。622.第一线圈1120可以设置在线圈架1110处或与线圈架1110联接。例如,第一线圈1120可以设置在线圈架1110的外表面处。623.例如,尽管第一线圈1120可以沿绕光轴oa的旋转方向环绕线圈架1110的外表面,但本公开内容不限于此。624.尽管第一线圈1120可以直接绕线圈架1110的外表面卷绕,但本公开内容不限于此。在另一实施方式中,第一线圈1120可以实施为线圈环或角形环,并且可以绕线圈架1110设置。625.可以向第一线圈1120供应电力或驱动信号。626.供应至第一线圈1120的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量两者的信号,并且可以是电压型或电流型。627.当向第一线圈1120供应驱动信号(例如,驱动电流)时,可以通过第一线圈1120与磁体1130之间的电磁作用产生电磁力,并且线圈架1110可以通过所产生的电磁力沿光轴方向oa移动。628.线圈架1110可以从af操作单元的初始位置向上或向下移动,这被称为af操作单元的双向驱动。替代性地,线圈架1110可以从af操作单元的初始位置向上(或向前)移动,这被称为af操作单元的单向驱动。629.在af操作单元的初始位置处,第一线圈1120可以在平行于与光轴oa垂直并延伸穿过光轴的线的方向上与设置在壳体1140处的磁体1130对应或重叠。630.例如,af操作单元可以包括线圈架1110和联接至线圈架1110的部件(例如,第一线圈1120、感测磁体1180和平衡磁体1185)。af操作单元还可以包括透镜模块1400。631.af操作单元的初始位置可以是在没有电力施加至线圈120的状态下af操作单元的初始位置,或者是由于上弹性构件150和下弹性构件160仅因af操作单元的重量弹性地变形而导致af操作单元作所处的位置。632.另外,线圈架110的初始位置可以是当重力沿从线圈架110至基座210的方向作用时或当重力沿从基座210至线圈架110的方向作用时af操作单元所处的位置。633.感测磁体180可以提供由第一位置传感器1170检测的磁场,并且平衡磁体1185可以用于抵消感测磁体1180的磁场的影响并相对于感测磁体1180建立重量平衡。634.感测磁体1180可以替代性地被称为“感测磁体”。635.感测磁体1180可以设置在线圈架1110处,或者可以联接至线圈架1110。636.感测磁体1180可以设置成面向第一位置传感器1170。637.平衡磁体1185可以设置在线圈架1110处,或者可以联接至线圈架1110。例如,平衡磁体1185可以设置成与感测磁体1180对置。638.尽管感测磁体1180和平衡磁体1185中的每一者都可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,感测磁体1180和平衡磁体1185中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。639.感测磁体1180可以与线圈架1110一起沿光轴方向移动,并且第一位置传感器1170可以检测沿光轴方向移动的感测磁体1180的磁场的强度或磁力,并且可以输出与检测结果对应的输出信号。640.例如,根据线圈架1110在光轴方向上的位移,由第一位置传感器1170检测到的磁场的强度或磁力可以变化。因此,第一位置传感器1170可以输出与检测到的磁场的强度成比例的输出信号,并且可以使用来自第一位置传感器1170的输出信号来检测线圈架1110在光轴方向上的位移。641.壳体1140在其中容纳线圈架1110,并且支承磁体1130、第一位置传感器1170和电路板1190。642.参照图31、图33和图34,壳体1140可以构造成整体上具有中空的柱体。例如,壳体1140可以具有多边形(例如,矩形或八边形)或圆形的孔,并且壳体1140中的孔可以是沿光轴方向穿过壳体1140形成的通孔。643.壳体1140可以包括侧部部分和拐角,该侧部部分对应于或面向盖构件1300的侧板1302,该拐角对应于或面向盖构件1300的拐角。644.为了防止与盖构件1300的上板1301的内表面直接碰撞,壳体1140可以包括设置在其上部部分、上表面或上端部处的止挡部1145。645.为了防止壳体1140的下表面与图像传感器1350的电路板1800碰撞,壳体1140还可以包括从其下表面突出的止挡部1147。此处,止挡部1145和1147可以替代性地被称为“凸台”或“突出部”。646.参照图31,壳体1140可以具有构造成在其中接纳电路板1190的安装凹槽(或坐置凹槽)1014a。安装凹槽1014a可以具有与电路板1190的形状对应的形状。647.参照图33,壳体1140可以具有开口141,电路板1190的端子构件1095的端子k1至k6通过开口141暴露出。开口1141可以形成在壳体1140的侧部部分中。648.壳体1140的上部部分、上端部或上表面可以设置有至少一个第一联接器,所述至少一个第一联接器将联接至上弹性构件1150的第一外框架1152。649.壳体1140的下部部分、下端部或下表面可以设置有第二联接器,该第二联接器将联接并固定至下弹性构件1160的第二外框架1162。例如,壳体1140的第一联接器和第二联接器中的每一者可以具有突出部、凹槽或平坦表面的形状。650.磁体1130可以设置在壳体1140处。例如,磁体1130可以设置在壳体1140的侧部部分处。磁体1130可以是用于af操作的af操作磁体。651.例如,尽管磁体1130可以包括设置在彼此相对定位的两个侧部部分处的第一磁体和第二磁体,但本公开内容不限于此。在另一实施方式中,磁体1130可以设置在壳体1140的拐角处。652.磁体1130可以包括两个或更多个磁体。653.在af操作单元的初始位置处,第一磁体1130可以在壳体1140处设置成在平行于与光轴oa垂直并延伸穿过光轴oa的线的方向上与第一线圈1120部分地重叠。654.尽管第一磁体1130-1和第二磁体1130-2中的每一者可以是单极磁化磁体,但本公开内容不限于此。在另一实施方式中,第一磁体1130-1和第二磁体1130-2中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。655.电路板1190可以设置在壳体1140处,并且第一位置传感器1170可以设置在电路板1190处或安装至电路板1190。例如,电路板1190可以设置在壳体1140中的安装凹槽1014a中,并且电路板1190的端子可以通过壳体1140中的开口1141暴露于壳体1140的外部。656.电路板1190可以包括端子构件(或端子单元)1095,端子构件(或端子单元)1095包括多个端子k1至k6,其导电地连接至外部端子或外部设备,并且多个端子k1至k6可以导电地连接至第一位置传感器1170。657.第一位置传感器1170可以设置在电路板1190的第一表面上,并且多个端子k1至k6可以设置在电路板1190的第二表面上。此处,电路板1190的第二表面可以是与电路板1190的第一表面相反的表面。例如,电路板1190的第一表面可以是电路板1190的面向线圈架1110或感测磁体1180的表面。658.例如,电路板1190可以实施为印刷电路板或fpcb。659.电路板1190可以包括用于将第一端子k1至第六端子k6导电地连接字第一位置传感器1170的电路图案或布线(未示出)。660.第一位置传感器1170可以对安装在线圈架1110上的感测磁体1180在线圈架1110运动期间的磁场或磁场的强度进行检测,并且可以输出与检测结果对应的输出信号。661.第一位置传感器1170可以仅实施为一个霍尔传感器。第一位置传感器1170可以包括两个输入端子和两个输出端子,驱动信号或电力供应至所述两个输入端子,感应电压(或输出电压)通过所述两个输出端子输出。662.例如,驱动信号可以通过电路板1190的第一端子k1和第二端子k2供应至第一位置传感器1170,并且第一位置传感器1170的输出可以通过第三端子k3和第四端子k4输出至外部。663.电路板1190的第五端子k5和第六端子k6可以导电地连接至上弹性构件1150和下弹性构件1160中的至少一者,以便将驱动信号供应至第一线圈1120。664.在另一实施方式中,第一位置传感器1170可以实施为包括霍尔传感器的驱动ic。例如,第一位置传感器1170可以包括霍尔传感器和驱动器。此处,第一位置传感器1170可以包括:第一端子至第四端子,借助于所述第一端子至第四端子,通过使用协议比方说例如i2c通信的数据通信将数据传输至外部以及从外部接收数据;以及第五端子和第六端子,通过第五端子和第六端子,将驱动信号直接供应至第一线圈1120。第一位置传感器1170的第一端子至第四端子可以导电地连接至电路板1190的第一端子k1至第四端子k4。第一位置传感器1170的第五端子和第六端子可以通过上弹性构件1150和下弹性构件1160中的至少一者导电地连接至第一线圈1120,以便将驱动信号供应至第一线圈1120。665.电容器1195可以设置或安装在电路板1190的第一表面上。电容器1195可以构造成具有芯片形状。此处,芯片可以包括:第一端子,该第一端子与电容器1195的一个端部对应;以及第二端子,该第二端子与电容器1195的另一个端部对应。电容器1195可以替代性地被称为“电容元件”或“蓄电器”。666.电容器1195可以与电路板1190的第一端子k1和第二端子k2导电地并联连接,通过第一端子k1和第二端子k2从外部向位置传感器1170供应电力(或驱动信号)。替代性地,电容器1195可以与第一位置传感器1170的端子导电地并联连接,第一位置传感器1170的端子导电地连接至电路板1190的第一端子k1和第二端子k2。667.由于电容器1195与电路板1190的第一端子k1和第二端子k2导电地并联连接,因此电容器1195能够用作平滑电路,以消除从外部供应至第一位置传感器1170的电力信号gnd和vdd中所包括的波纹分量,并且因此能够向第一位置传感器1170供应稳定且一致的电力信号。668.上弹性构件1150可以联接至线圈架1110的上部部分、上端部或上表面以及壳体1140的上部部分、上端部或上表面,并且下弹性构件1160可以联接至线圈架1110的下部部分、下端部或下表面或者壳体1140的上部部分、上端部或上表面。669.上弹性构件1150和下弹性构件1160可以相对于壳体1140弹性地支承线圈架1110。670.尽管上弹性构件1150和下弹性构件1160中的每一者在图31中实施为单个单元或单个结构,但本公开内容不限于此。671.在另一实施方式中,上弹性构件和下弹性构件中的至少一者可以包括彼此在导电方面隔离或间隔开的多个弹性单元或弹簧。672.上弹性构件1150还可以包括联接或固定至线圈架1110的上部部分、上表面或上端部的第一内框架1151、联接或固定至壳体1140的上部部分、上表面或上端部的第二内框架152、以及将第一内框架1151连接至第一外框架1152的第一框架连接器1153。673.下弹性构件1160可以包括联接或固定至线圈架1110的下部部分、下表面或下端部的第二内框架1161、联接或固定至壳体1140的下部部分、下表面或下端部的第二外框架1162-1至1162-3、以及将第二内框架1161连接至第二外框架1162-1至1162-3的第二框架连接器1163。674.上弹性构件150的第一框架连接器1153和下弹性构件160的第二框架连接器1163中的每一者可以弯折或弯曲(或者可以形成为曲线)至少一次,以便限定预定图案。675.上弹性构件1150和下弹性构件1160中的每一者可以由导电材料制成。676.参照图31和图32,电路板1190的第一表面可以设置有两个焊盘1005a和1005b,所述两个焊盘1005a和1005b导电地连接至电路板1190的第五端子k5和第六端子k6。上弹性构件1150可以包括第一接合部分1004a,第一接合部分1004a联接或导电地连接至第一焊盘1005a,并且下弹性构件1160可以包括第二接合部分1004b,第二接合部分1004b导电地连接至第二焊盘1005b。第一线圈1120可以在其一个端部处联接至上弹性构件1150并且在另一个端部处联接至下弹性构件1160。677.在另一实施方式中,上弹性构件1150或下弹性构件1160可以包括两个弹性构件,并且这两个弹性构件中的每个弹性构件可以联接或导电地连接至电路板1190的第一焊盘和第二焊盘中的对应的一者。第一线圈1120可以导电地连接至这两个弹性构件。678.图35是图29中所示的图像传感器单元1350的立体图。图36是图35中所示的图像传感器单元1350的分解立体图。图37是第一电路板1800和壳体1450的立体图。图38是图36中所示的第一电路板1800、壳体1450和磁体1023的立体图。图39a是第二电路板1900、第二线圈1230、第二位置传感器1240、图像传感器1810、支承构件1220和保持器1270的分解立体图。图39b是图39a中所示的第三电路板1250、第二线圈1230和第二位置传感器1240的平面图。图40是图36中所示的第二电路板1900、图像传感器1810、支承构件1220、保持器1270和连接弹性构件1280的分解立体图。图41是图35中所示的图像传感器单元1350的、从中移除了底盖1219的底视图。图42是图42中所示的连接弹性构件1280的局部放大图。图43是图示了连接弹性构件1280的连接弹簧1001a、1002a、1003a和1004a的视图。图44a是图28中所示的相机模块1010的沿着线a-b截取的横截面图。图44b是图28中所示的相机模块1010的沿着线c-d截取的横截面图。图45是图28中所示的相机模块1010的沿着线i-j截取的横截面图。图46是图35中所示的图像传感器单元1350的沿着线e-f截取的横截面图。图47是图35中所示的图像传感器350的沿着线g-h截取的横截面图。图52是移除了底盖1219且被剖开的相机模块1010的立体图。679.参照图35至图48,图像传感器单元1350可以包括第一电路板1800、磁体1023、第二电路板1900、第二线圈1230、图像传感器1810、连接弹性构件1280和支承构件1220。680.图像传感器单元1350还可以包括壳体1450,壳体1450构造成接纳第一电路板1800的至少一部分。681.第一电路板1800可以用于从外部向图像传感器单元1350供应信号或从图像传感器单元1350向外部输出信号。682.参照图36和图37,第一电路板可以包括:第一区域1801,第一区域1801对应于af操作单元1100;第二区域1802,在第二区域1802处设置有连接器1840;以及第三区域1803,第三区域1803将第一区域1801连接至第二区域1802。连接器1840可以导电地连接至第二电路板1800的第二区域1802,并且可以包括构造成导电地连接至外部设备的端口。683.尽管第二电路板1800的第一区域1801和第二区域1802中的每一者可以包括柔性基底和刚性基底,并且第三区域803可以包括柔性基底,但本公开内容不限于此。在另一实施方式中,电路板1800的第一区域1801至第三区域1803中的至少一者可以包括刚性基底和柔性基底中的至少一者。684.第一电路板1800可以包括孔1800a,孔1800a对应于af操作单元1100的线圈架1110中的孔、透镜模块1400和/或图像传感器1810。例如,第一电路板1800中的孔1800a可以形成在第一区域1801中。685.参照图44a,透镜模块1400的至少一部分可以延伸穿过第一电路板1800中的孔1800a,并且可以定位在第一电路板1800的第二表面1044b下方。686.透镜模块1400可以设置在第二电路板1900上。例如,透镜模块1400可以定位在第三电路板1250上。例如,透镜模块1400可以定位在第三电路板1250中的孔1501上方。687.例如,透镜模块1400的透镜或透镜镜筒的下部部分、下端部或下表面可以延伸穿过第一电路板1800中的孔1800a,并且可以定位在第一电路板1800的第二表面1044b下方。688.此外,透镜模块1400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在第二电路板1900(或第三电路板1250)的第一表面(例如,上表面)1051a上。689.此外,透镜模块1400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在第三电路板1250的孔1501上方。690.尽管第一电路板1800可以构造成在从上面看时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,第一电路板1800可以构造成具有圆形形状等。此外,尽管第一电路板1800中的孔1800a可以构造成在从上面看时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,孔1800a可以构造成具有圆形形状等。691.第一电路板1800可以包括与支承构件1220对应的至少一个焊盘。例如,第一电路板1800的至少一个焊盘可以包括多个焊盘1800b。此处,焊盘1800b可以替代性地被称为“引线图案”、“引线构件“或“孔”。692.第一电路板1800可以在其中具有与支承构件1220对应的至少一个孔,并且所述孔可以穿过第一电路板1800形成。例如,第一电路板1800可以在其中具有与多个支承构件对应的多个通孔。693.例如,多个焊盘1800b中的每个焊盘可以在其中具有孔,该孔在光轴oa的方向上穿过第一电路板1800形成。多个焊盘1800b中的每个焊盘可以环绕该孔,并且还可以包括引线图案或导电层。694.支承构件1220可以延伸穿过焊盘1800b中的孔,并且可以焊接至焊盘1800b,以便导电地连接至设置在焊盘1800b中的孔周围的引线图案。695.例如,多个焊盘1800b可以以规则的间隔彼此间隔开,以便环绕第一电路板1800中的孔1800a。例如,多个焊盘1800b可以设置在第一电路板1800中的孔1800a与第一电路板1800的侧部之间的区域中。696.第一电路板1800可以具有至少一个联接孔1800c,所述至少一个联接孔1800c构造成联接至壳体1450的联接突出部1045b。尽管联接孔1800c可以是沿光轴方向穿过第一电路板1800形成的通孔,但本公开内容不限于此。在另一实施方式中,联接孔1800c可以采取凹槽的形式。697.例如,尽管联接孔1800c可以形成在第一电路板1800的在对角线方向上彼此相对的拐角中,但本公开内容不限于此。在另一实施方式中,联接孔可以定位成与电路板1800的侧部相邻或者定位在电路板的侧部与孔1800a之间。698.第一电路板1800可以包括至少一个端子,例如,多个端子1080a。699.多个端子1080a可以形成在第一电路板1800的第一表面(例如,上表面)44a上。例如,多个端子1080a可以设置在第一电路板1800的与第一电路板1800的一个拐角相邻的一个侧部处。700.多个端子1080a中的每个端子可以经由导电粘合构件或焊料导电地连接至电路板1190的端子k1至k6中的对应的一个端子。701.例如,第一电路板1800可以包括端子构件1085,端子构件1085上形成有多个端子1080a。端子构件1085可以从第一电路板1800的一个侧部沿垂直于光轴的方向突出。702.图像传感器单元1350还可以包括壳体1450,第一电路板1800设置、坐置或接纳在壳体1450中。703.壳体1450可以在其中接纳第一电路板1800的至少一部分(例如,第一区域)。壳体1450可以在其中接纳磁体1023,并且可以替代性地被称为“磁体保持器”。704.壳体1450可以设置在af操作单元1100的壳体1140下方,并且可以联接至图像传感器单元1350的壳体1140。例如,壳体1450的上部部分、上端部或上表面可以经由粘合构件或联接结构联接至af操作单元1100的壳体1140的下部部分、下端部或下表面。705.此处,联接结构可以包括设置在af操作单元1100的壳体1140的下部部分、下端部或下表面处的第一联接器和设置在图像传感器单元1350的壳体1450的上部部分、上端部或上表面处的第二联接器。第一联接器可以构造成具有突出部形状或凹槽(或孔)形状,并且第二联接器可以构造成具有凹槽(或孔)形状或突出部形状。706.在另一实施方式中,af操作单元1100的壳体1140可以经由粘合构件联接至第一电路板1800。707.壳体1450可以设置在第一电路板1800下方。例如,af操作单元1100可以设置在第一电路板1800的上方,并且壳体1450可以设置在第一电路板1800的下方。708.壳体1450可以具有与第一电路板1800的第一区域1801对应或一致的形状。尽管壳体1450可以构造成当从上方观察时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,壳体1450可以构造成具有圆形形状或椭圆形形状。709.壳体1450在其中可以具有孔1450a。壳体1450中的孔1450a的至少一部分可以与第一电路板1800中的孔1800a对应或重叠。710.尽管壳体1450中的孔1450a可以构造成当从上方观察时具有多边形(例如,四边形形状或八边形形状)、圆形形状或十字形形状,但本公开内容不限于此。壳体1450中的孔1450a可以是沿光轴方向穿过壳体1450形成的通孔。711.例如,壳体1450可以包括构造成支承第一电路板1800的至少一部分(例如,第一区域1801)的本体1042、从本体1042沿光轴oa的方向突出的突起1043以及穿过本体1042形成的孔1450a。712.壳体1450可以包括从本体1042的上表面突出的至少一个联接突出部1045b。例如,联接突出部1045b可以从本体1044的上表面沿朝向第一电路板1800的第二表面(例如,下表面)1044b的方向突出。713.壳体1450可以包括与多个焊盘1800b对应的避让区域1041。避让区域1041可以形成在与支承构件1220对应的位置处,以避免壳体1450与支承构件1220之间发生空间干涉。714.壳体1450的突起1043可以包括构造成将第一电路板1800的第一区域1801的一部分暴露于外部的第一开口1046以及构造成将形成在端子构件1085处的端子1080a暴露于外部的第二开口1047。715.例如,壳体1450中的第二开口1047可以在光轴oa方向上形成在与af操作单元1100的壳体1140中的开口1141对应的位置处。716.参照图28和图37,第一电路板1800可以包括与af操作单元1100的电路板1190的端子k1至k6对应的端子1080a。717.第一电路板1800的端子1080a中的每个端子1080a可以经由焊料或导电构件联接至af操作单元1100的电路板1190的端子k1至k6中的对应的一个端子。718.第一电路板1800的端子1080a中的每个端子1080a可以导电地连接至af操作单元1100的电路板1190的端子k1至k6中的对应的一个端子。驱动信号或电力可以通过第一电路板1800供应至第一位置传感器1170,并且第一位置传感器1170的输出可以输出至第一电路板1800。此外,驱动信号或电力可以通过第一电路板1800供应至第一线圈1120。719.参照图28,第一电路板1800可以包括设置在第二区域1802中的连接器1840。例如,连接器1840可以设置在第一电路板1800的第二区域1802的一个表面上(例如,上表面或下表面)。720.壳体1450可以包括坐置部分1008a,磁体1023接纳、设置或坐置在坐置部分1008a中。坐置部分1008a可以设置在壳体1450的本体1042处。721.例如,坐置部分1008a可以形成在壳体1450的拐角中。例如,坐置部分1008a可以构造成具有从本体1042的下表面凹陷的凹槽的形式,并且可以具有与磁体1023对应的形状。例如,尽管壳体1450可以包括分别形成在壳体1450的四个拐角中的坐置部分1008a,但本公开内容不限于此。在另一实施方式中,壳体1450可以包括与磁体1023的数目对应的多个坐置部分。722.磁体1023可以设置在壳体1450处。例如,尽管磁体1023可以设置在壳体1140的拐角处,但本公开内容不限于此。在另一实施方式中,磁体1023可以设置在壳体1450的侧部部分处。723.磁体1023可以用于供应磁场,该磁场与第二线圈1230相互作用,以出于手抖动校正的目的执行ois(光学图像稳定)。724.例如,磁体1023可以包括多个磁体1023a至1023d。磁体1023a至1023d中的每个磁体可以设置在壳体1450的拐角中的对应的一个拐角处。725.尽管磁体1023a至1023d中的每个磁体可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,磁体1023a至1023d中的每个磁体可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。726.例如,四个磁体1023a至1023d中的每个磁体可以设置在壳体1450的四个拐角中的对应的一个拐角处。例如,尽管设置在壳体1450的两个相邻拐角处的两个磁体(例如,1023a和1023b)可以定向成彼此垂直,并且设置在壳体1450的在对角线方向上面向彼此的两个拐角处的两个磁体(例如,1023a和1023c;1023b和1023d)可以定向成彼此平行,但本公开内容不限于此。727.例如,磁体1023a至1023d的内部部分可以具有相同的极性。此外,磁体1023a至1023d的外部部分可以具有相同的极性。728.例如,磁体1023a至1023d中的每个磁体的内部部分可以被磁化为n极,并且磁体1023a至1023d中的每个磁体的外部部分可以被磁化为s极。在改型中,磁体1023a至1023d中的每个磁体的内部部分可以被磁化为s极,并且磁体1023a至1023d中的每个磁体的外部部分可以被磁化为n极。729.参照图36至图40,第二电路板可以设置在第一电路板1800下方。第二电路板1900可以包括第三电路板1250和第四电路板1260。第四电路板1260可以替代性地被称为“连接板”。730.例如,第三电路板1250可以设置在第一电路板1800下方。731.第三电路板1250可以在其中具有孔1501,孔1501对应或面向线圈架1110中的孔、壳体1450中的孔和/或第一电路板1800中的孔1800a。732.例如,第三电路板1250中的孔1501可以是沿光轴方向穿过第三电路板1250形成的通孔,并且可以定位在第三电路板1250的中央处。733.尽管第三电路板1250的形状、例如外周缘形状当从上方观察时可以是与基座1210的上表面一致或对应的形状比如四边形形状,但本公开内容不限于此。734.此外,尽管第三电路板1250中的孔1501可以具有多边形形状、例如四边形形状、圆形形状或椭圆形形状,但本公开内容不限于此。735.第三电路板1250可以在其中具有与第一电路板1800的多个焊盘1800b对应的多个孔1250a。尽管第三电路板1250中的多个孔1250a可以是沿光轴oa的方向穿过第三电路板1250形成的通孔,但本公开内容不限于此。在另一实施方式中,第三电路板1250中的多个孔可以是避让凹槽或避让部分,所述避让凹槽或避让部分构造成避免与支承构件1220发生空间干涉。736.例如,第三电路板1250中的多个孔1250a可以布置成环绕第三电路板1250中的孔1501,并以规则的间隔彼此隔开。例如,多个孔1250a可以形成在第三电路板1250的孔1501中和第三电路板1250的侧部中。737.第三电路板1250可以具有至少一个联接孔1025a,所述至少一个联接孔1025a构造成联接至保持器1270的突出部1273。尽管第三电路板1250中的联接孔1025a可以是沿光轴方向穿过第三电路板1250形成的通孔,但本公开内容不限于此。在另一实施方式中,联接孔1025a可以采取凹槽的形式。738.例如,尽管联接孔1025a可以形成在第三电路板1250的拐角中的至少一个拐角中,但本公开内容不限于此。联接孔1025a也可以定位成与第三电路板1250的侧部相邻或者定位在第三电路板1250的侧部与孔1501之间。739.参照图40,第三电路板1250可以包括多个端子1251。例如,多个端子1251可以在第三电路板1250的第二表面1051b(例如,下表面)上设置成彼此间隔开。第二表面1051b可以是与第一表面1051a相反的表面。端子1251的数目不限于图40中所示的数目,并且可以大于或小于图40中所示的数目。740.例如,多个端子1251可以设置在第三电路板1250中的孔1501与第三电路板1250的一个侧部之间的区域中。例如,多个端子1251可以设置成距第三电路板1250中的孔1501比距多个孔1250a更近。741.第三电路板1250可以包括构造成导电地连接至第二线圈1230的焊盘1009a至1009h。此处,焊盘可以替代性地被称为“端子”或“接合部分”。第三电路板1250的焊盘1009a至1009a可以导电地连接至第三电路板1250的多个端子1251。742.第三电路板1250可以是印刷电路板或柔性印刷电路板(fpcb)。743.第二线圈1230可以设置或安装在第三电路板1250的第一表面(例如,上表面)1051a上。744.第二线圈1230可以设置在壳体1450下方。第二线圈1230可以设置在磁体1023下方。745.例如,第二线圈1230可以设置在电路板1250上,以便在光轴oa的方向上与设置在壳体1450处的磁体1023对应、面向或重叠。746.例如,第二线圈1230可以包括多个线圈单元1230-1至1230-4。例如,第二线圈1230可以包括四个线圈单元。747.多个线圈单元1230-1至1230-4中的每个线圈单元可以在光轴oa的方向上与设置在壳体1450处的磁体1023a至1023d中的对应的一个磁体面向或重叠。748.尽管线圈单元中的每个线圈单元可以呈具有闭合曲线形状或环形形状的线圈块的形式,但本公开内容不限于此。例如,线圈单元中的每个线圈单元可以包括fp(精细图案)线圈。在另一实施方式中,线圈单元可以形成在除了第三电路板1250之外的另外的电路构件处。在另一实施方式中,线圈单元可以直接形成在电路板1250中。749.例如,四个线圈单元1230-1至1230-4可以设置或形成在四边形电路板1250的拐角或拐角区域处。750.第二线圈1230可以导电地连接至第三电路板1250,并且因此可以通过第三电路板1250将电力或驱动信号供应至第二线圈1230。供应至第二线圈1230的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量两者的信号,并且可以是电压型或电流型。751.此处,电流可以被独立地施加至四个线圈单元中的至少三个线圈单元。752.在第一实施方式中,可以通过三个通道控制第二线圈1230。753.例如,在第一线圈单元至第四线圈单元中,只有第一线圈单元至第三线圈单元可以彼此在导电方面隔离,并且第四线圈单元可以串联地导电连接至第一线圈单元至第三线圈单元中的一者。此处,可以从第二线圈1230引出三对引线,即,总共六根引线。754.在第二实施方式中,可以通过四个单独的通道控制第二线圈1230。此处,四个线圈单元可以彼此在导电方面隔离。可以选择性地向线圈单元中的每个线圈单元施加正向电流和反向电流中的一者。此处,可以从第二线圈1230中引出四对引线,即,总共八根引线。755.例如,在对角线方向上面向彼此的两个线圈单元1230-1和1230-3可以沿在第一轴向方向(例如,沿y轴方向)延伸或定向,并且在对角线方向上面向彼此的另外两个线圈单元1230-2和1230-4可以沿第二轴向方向(例如,沿x轴方向)延伸或定向。此处,第一轴向方向可以与第二轴向方向垂直。756.第一线圈单元1230-1的长边和第三线圈单元1230-3的长边可以设置成彼此平行。第二线圈单元1230-2的长边和第四线圈单元1230-4的长边可以设置成彼此平行。第一线圈单元1230-1的长边和第二线圈单元1230-2的长边可以不设置成彼此平行。此处,第一线圈单元1230-1的长边和第二线圈单元1230-2的长边可以设置成使得从其延伸的假想线彼此相交。例如,第一线圈单元1230-1定向所沿的方向和第二线圈单元1230-2定向所沿的方向可以彼此垂直。757.在另一实施方式中,四个线圈单元中的至少一个线圈单元可以与其余线圈单元被分开地驱动。在另一实施方式中,四个线圈单元可以被单独地驱动。758.例如,第一线圈单元1230-1可以在其一个端部处连接至第一焊盘9a并且在其另一个端部处连接至第二焊盘9b。可以将第一驱动信号供应至第一焊盘1009a和第二焊盘1009b,以便激活第一线圈单元1230-1。759.第三线圈单元1230-3可以在其一个端部处连接至第三焊盘1009c并且在其另一个端部处连接至第四焊盘1009d。可以将第二驱动信号供应至第三焊盘1009c和第四焊盘和1009d,以便激活第三线圈单元1230-3。760.第二线圈单元1230-2可以在其一个端部处连接至第五焊盘1009e并且在其另一个端部处连接至第六焊盘1009f。可以将第三驱动信号供应至第五焊盘1009e和第六焊盘1009f,以便激活第二线圈单元1230-2。761.第四线圈单元1230-4可以在其一个端部处连接至第七焊盘1009g并且在其另一个端部处连接至第八焊盘1009h。可以将第四驱动信号供应至第七焊盘1009g和第八焊盘1009h,以便激活第四线圈单元1230-4。762.在实施方式中,在对角线方向上面向彼此的两个线圈单元(例如,1230-3和1230-4)可以彼此直接串联连接,并且可以由单个驱动信号激活。同时,在对角线方向上面向彼此的两个线圈单元(例如,1230-1和1230-2),可以彼此在导电方面隔离,并且可以由不同的驱动信号单独地激活。763.在另一实施方式中,四个线圈单元1230-1至1230-4可以彼此在导电方面隔离,并且可以由不同的各个驱动信号单独地激活。764.借助磁体1023a至1023d与被施加驱动信号的线圈单元1230-1至1230-4之间的相互作用,包括图像传感器1810的ois可移动单元可以沿第二方向和/或第三方向、例如沿x轴方向和/或y轴方向移动,从而执行手抖动校正。关于ois可移动单元的描述将随后给出。765.图像传感器单元1350还可以包括用于反馈ois操作的第二位置传感器1240。766.第二位置传感器1240可以设置、联接或安装至第三电路板1250的第一表面(例如,上表面)1051a。第二位置传感器1240可以检测ois可移动单元在垂直于光轴oa的方向上的位移,例如,ois可移动单元在垂直于光轴的方向上的移位或倾斜,或ois可移动单元绕光轴的旋转。767.此处,第一位置传感器1170可以替代性地被称为“af位置传感器”,并且第二位置传感器1240可以替代性地被称为“ois位置传感器”。768.第二位置传感器240可以包括一个或更多个传感器1240a、1240b和1240c。769.例如,第二位置传感器1240可以包括三个传感器1240a、1240b和1240c。770.第一传感器至第三传感器1240a、1240b和1240c中的每一者可以实施为仅一个霍尔传感器,或者可以实施为包括霍尔传感器的驱动ic。对第一位置传感器1170的描述可以在修改或未修改的情况下适用于第一传感器至第三传感器1240a、1240b和1240c。771.第一传感器至第三传感器1240a、1240b和1240c中的每一者可以导电地连接至第一电路板1250的端子262中的预定对应端子。例如,驱动信号可以相应地经由端子1251施加至第一传感器至第三传感器1240a、1240b和240c中的每一者,并且第一传感器至第三传感器中的每一者的输出信号可以输出至端子1251中的其他预定端子。772.例如,由于通过三个通道控制四个线圈单元1230-1至1230-4,因此第一传感器至第三传感器1240a、1240b和1240c中的每一者可以设置在三个线圈单元1230-1至1230-3中的对应的一者中,并且剩余的线圈单元1230-4可以不设置有传感器。773.例如,线圈单元1230-1至1230-4中的每一者可以构造成呈在其中具有开口、孔或腔的环的形式。例如,第一传感器至第三传感器1240a、1240b和1240c中的每一者可以设置在线圈单元1230-1至1230-3中的对应的一者的开口、孔或腔中。774.例如,线圈单元1230-1至1230-4和传感器1240a、1240b和1240c可以设置在与第一电路板1900的第一表面相同的平坦表面上。775.图像传感器1810在x轴和y轴方向上的所有运动以及图像传感器1810绕z轴的旋转可以由三个传感器1240a、1240b和1240c检测。776.三个传感器1240a、1240b和1240c中的一者(例如,1240a)可以检测ois可移动单元在x轴方向上的运动量和/或位移。三个传感器1240a、1240b和1240c中的另一者(例如,1240b)可以检测ois可移动单元在y轴方向上的运动量和/或位移。三个传感器1240a、1240b和1240c中的剩余一者可以检测ois可移动单元在x轴方向和/或y轴方向上的运动量和/或位移。可以使用三个传感器1240a、1240b和1240c中的两者或更多者的输出来检测ois可移动单元绕z轴的旋转运动。777.当将驱动信号(例如,驱动电流)施加至第一线圈单元1230-1和第三线圈单元1230-3,但未施加至第二线圈单元1230-2或第四线圈单元1230-4时,由第一线圈单元1230-1与第一磁体1023a之间的相互作用而产生的第一电磁力的方向和由第三线圈单元1230-3与第三磁体1023c之间的相互作用而产生的第三电磁力的方向可以是同一方向,例如,x轴方向(例如, x轴方向或-x轴方向),并且ois可移动单元可以沿x轴方向(例如,沿 x轴方向或沿-x轴方向)移动(移位)。778.例如,当将驱动信号(例如,驱动电流)施加至第二线圈单元1230-2和第四线圈单元1230-4,但未施加至第一线圈单元1230-1或第三线圈单元1230-3时,由第二线圈单元1230-2与第二磁体1023b之间的相互作用而产生的第二电磁力的方向和由第四线圈单元1230-4与第四磁体1023d之间的相互作用而产生的第四电磁力的方向可以是同一方向,例如,y轴方向(例如, y轴方向或-y轴方向),并且ois可移动单元可以沿y轴方向(例如,沿 y轴方向或沿-y轴方向)移动(移位)。779.例如,当将驱动信号被加至第一线圈单元1230-1至第四线圈单元1230-4中的每一者时,第一电磁力的方向和第三电磁力的方向是彼此相反的,第二电磁力的方向和第四电磁力的方向是彼此相反的,并且由于第一电磁力和第三电磁力导致的ois可移动单元的旋转方向与由于第二电磁力和第四电磁力导致的ois可移动单元的旋转方向相同,ois可移动单元可以绕光轴或z轴旋转或滚动。780.当通过三个通道控制第二线圈1230时,可以使用第一线圈单元1230-1和第三线圈单元1230-3或第二线圈单元1230-2和第四线圈单元1230-4使ois可移动单元滚动。781.在图39a和图39b所示的实施方式中,第二位置传感器1240可以包括三个传感器1240a、1240b和1240c。782.例如,第一传感器1240a可以设置在第一线圈单元1230-1中的电路板1250的第一表面(例如,上表面)1051a上,第三传感器1240c可以设置在第三线圈单元1230-3中的电路板1250的第一表面(例如,上表面)1051a上,并且第二传感器1240b可以设置在第二线圈单元1230-2中的电路板1250的上表面上。783.例如,尽管第一传感器1240a可以在光轴oa的方向上不与第一线圈单元1230-1重叠,第三传感器1240c可以在光轴oa的方向上不与第三线圈单元1230-3重叠,并且第二传感器1240b可以在光轴oa的方向上不与第二线圈单元1230-2重叠,但本公开内容不限于此。在另一实施方式中,传感器和线圈单元两者可以在光轴方向上至少部分地彼此重叠。784.第一传感器1240a可以在光轴方向上与磁体1023a重叠,第三传感器1240c可以在光轴方向上与磁体1023c重叠,并且第二传感器1240b可以在光轴方向上与磁体1023b重叠。785.此外,第一传感器1240a可以在垂直于光轴oa的方向上与第一线圈单元1230-1重叠,第三传感器1240c可以在垂直于光轴oa的方向上与第三线圈单元1230-3重叠,并且第二传感器1240b可以在垂直于光轴oa的方向上与第二线圈单元1230-2重叠。在另一实施方式中,传感器和线圈单元可以在垂直于光轴oa的方向上不彼此重叠。786.在另一实施方式中,第二位置传感器1240可以包括一个第一传感器和一个第二传感器。在另一实施方式中,可以省去第一传感器1240a和第三传感器1240c中的一者。787.图像传感器单元1350可以包括运动传感器1820、控制器830、存储器1512和电容器1514中的至少一者。788.运动传感器1820、控制器830、存储器1512和电容器1514可以设置或安装至第一电路板1800和第三电路板1250中的一者。789.例如,运动传感器1820和存储器1512可以设置在第一电路板1800的第二表面1044b上,并且控制器830和电容器1514可以设置在第三电路板1250的第一表面1051a上。790.运动传感器1820可以经由形成在第三电路板1250处的布线或电路图案导电地连接至控制器830。791.运动传感器1820可以输出关于由相机模块1010的运动引起的旋转角速度的信息。运动传感器1820可以实施为双轴或三轴陀螺仪传感器或角速度传感器。792.存储器1512可以根据线圈架1110在光轴方向上的位移来存储代码值,以用于af反馈操作。此外,存储器1512可以根据ois可移动单元在垂直于光轴方向的方向上的位移来存储代码值,以用于ois反馈操作。另外,存储器1512可以存储用于控制器830的操作的算法或程序。793.此外,存储器1512可以存储校正值cv。校正值cv可以替代性地被称为“误差校正值”。关于校正值cv的描述将随后给出。794.例如,尽管存储器1512可以是例如eeprom(电可擦除可编程只读存储器),但本公开内容不限于此。795.控制器830可以导电地连接至第一位置传感器1170和第二位置传感器1240。796.控制器830可以使用存储在存储器1512中的第一代码值来控制第一位置传感器1170的输出信号和供应至第一线圈1120的驱动信号,从而执行反馈自动对焦操作。797.此外,控制器830可以使用存储在存储器1512中的第二代码值来控制从第二位置传感器1240供应的输出信号和供应至第二线圈1230的驱动信号,从而执行反馈ois操作。798.尽管控制器830可以是驱动ic类型的,但本公开内容不限于此。例如,控制器830可以导电地连接至第一电路板1250的端子1251。799.第四电路板1260可以设置在第三电路板1250下方。第四电路板1260可以替代性地被称为“第三电路板”。800.尽管第四电路板1260可以构造成在从上面看时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,第四电路板1260可以形成为具有圆形形状或椭圆形形状。801.例如,第四四边形电路板1260的前表面的表面积可以大于第三电路板1250中的孔1501的表面积。例如,第三电路板1250中的孔1501的下侧部可以被第四电路板1260封闭或阻挡。802.当从上面或下面看时,第四电路板1260的外表面(或外侧部)可以定位在第三电路板1250的外表面(或外侧部)与第三电路板1250的孔1501之间。803.第四电路板1260可以包括坐置区域1260a,图像传感器1810设置在该坐置区域1260a中。例如,第四电路板1260的第一表面(例如,上表面)1060a可以设置有坐置区域1260a,图像传感器1810设置或联接在该坐置区域1260a中。例如,坐置区域1260a可以设置成与第三电路板1250中的孔1501对准。804.参照图39a和图39b,第四电路板1260可以包括构造成与第三电路板1250的端子1251导电地连接的第一端子1261。第一端子1261可以替代性地被称为“第一端子部分“或“第一端子单元”。例如,第一端子1261可以包括多个第一端子。805.例如,第四电路板1260的第一端子1261可以经由焊料或导电粘合构件联接至第三电路板1250的端子1251。806.例如,第四电路板1260的第一端子1261可以设置在第四电路板1260的第一表面(例如,上表面)1060a上,并且可以与第三电路板1250在光轴方向上的端子1251对应、面向或重叠。807.参照图40,第四电路板1260可以包括第二端子1262,第二端子1262导电地连接至连接弹性构件1280。第二端子1262可以替代性地被称为“第二端子部分”或“第二端子单元”。808.例如,第四电路板1260的第二端子1262可以经由焊料1038(参见图41)或导电粘合构件联接至连接弹性构件1280。例如,第二端子1262可以包括多个第二端子。809.例如,第四电路板1260的第二端子1262可以设置在第四电路板1260的第二表面(例如,下表面)1060b上,并且可以与连接弹性构件1280连接弹簧281在光轴方向上对应、面向或重叠。第二表面1060b可以是与第一表面1060a相反的表面。810.尽管第四电路板1260可以是印刷电路板或fpcb,但本公开内容不限于此。811.保持器1270可以设置在第三电路板1250下方,以便支承第三电路板1250。例如,第三电路板1250的第二表面1051b可以与保持器1270的上表面接触。812.例如,保持器1270可以设置在第三电路板1250与连接弹性构件1280之间。813.保持器1270可以包括从其上表面朝向第三电路板1250突出的突起1276。突起1276可以用于对第三电路板1250的侧向侧表面进行支承,或者可以用作构造成允许第三电路板1250被容易地设置或坐置在保持器1270处的组装导引件。突起1276可以替代性地被称为“导引部分”或“导引突出部”。814.突起1276可以在第三电路板1250坐置在保持器1270上的状态下与第三电路板1250的外表面接触。例如,突起1276可以包括多个(例如,四个)突起,并且多个突起1276可以与第三电路板1250的所有四个外表面接触。815.例如,尽管突起1276在图39a中示出为形成在保持器1270的面向彼此的侧部的外表面上,但本公开内容不限于此。816.当从上面或下面看时,尽管保持器1270的外周缘可以具有四边形形状、例如正方形形状或长方形形状,但本公开内容不限于此。在另一实施方式中,保持器1270的外周缘可以具有圆形形状或椭圆形形状。817.保持器1270可以包括突出部1273,突出部1273对应于或面向第三电路板1250中的联接孔1025a。保持器1270上的突出部1273可以从保持器1270的第一表面1070a突出,并且可以联接至第三电路板1250中的联接孔1025a。因此,保持器1270和第三电路板1250可以彼此联接。保持器1270的第一表面1070a可以是面向第三电路板1250的第二表面1060b的表面。818.保持器1270可以具有与第四电路板1260对应的孔1071。819.尽管保持器1270中的孔1071可以具有四边形形状、例如正方形形状或矩形形状,但本公开内容不限于此。在另一实施方式中,孔1071可以具有圆形形状或椭圆形形状。820.例如,尽管保持器1270中的孔1071可以具有与第四电路板1260的形状一致或相同的形状,但本公开内容不限于此。保持器1270中的孔1071的尺寸或表面积可以大于第四电路板1260的第一表面1060a或第二表面1060b的尺寸或表面积。第四电路板1260可以设置在保持器1270中的孔1071内部。821.例如,保持器1270可以定形状成环绕第四电路板1260。822.保持器1270可以具有与第三电路板1250中的多个孔1250a对应的多个孔1270a。尽管保持器1270中的多个孔1270a可以是沿光轴oa的方向穿过保持器1270形成的通孔,但本公开内容不限于此。在另一实施方式中,保持器1270中的多个孔1270a可以是避让凹槽或避让部分,以避免与支承构件1220发生空间干涉。823.例如,保持器1270中的多个孔1270a可以设置成环绕保持器1270中的孔1071,并以规则的间隔彼此隔开。例如,多个孔1270a可以定位在保持器1270中的孔1071与保持器1270的侧部之间的区域。824.参照图40,保持器1270的第二表面1070b可以设置有突起1275。保持器1270的突起1275可以从保持器1270的第二表面1070b朝向基座1210的底部突出。825.保持器1270的突起1275可以比连接弹性构件1280朝向基座1210的底部突出得更甚。替代性地,保持器1270的突起1275可以比将连接弹性构件1280联接至支承构件1220的焊料1902朝向基座1210的底部突出得更甚。826.例如,保持器1270的突起1275与基座1210的底部之间在光轴方向上的第一距离可以小于连接弹性构件1280与基座120的底部之间的第二距离。例如,第一距离可以小于焊料1902与基座120的底部之间的第三距离。827.突起1275可以作为止挡部,该止挡部构造成防止保持器1270的第二表面1070b、连接弹性构件1280和/或焊料1902直接与基座1210的底部碰撞。828.例如,尽管突起1275可以设置在保持器1270的第二表面1070b的拐角处,但本公开内容不限于此。在另一实施方式中,突起1275可以设置在保持器1270的第二表面1070b的侧部处,或者设置在保持器1270的第二表面1070b的侧部与孔1071之间。829.参照图42,保持器1270可以具有从其第二表面1070b凹陷的至少一个凹槽1272。830.例如,保持器1270可以具有与第二表面1070b的多个侧部(例如,四个侧部面)对应的多个凹槽(例如,四个凹槽)。831.凹槽1272中的每个凹槽可以包括:底部1272a,底部1272a在光轴oa的方向上相对于第二表面1070b具有高度差;以及侧壁1272b,侧壁1272b将底部1272a连接至第二表面1070b。832.例如,凹槽1272的底部1272a可以定位成距保持器1270的第一表面1070a比距保持器1270的第二表面1070b更近。833.保持器1270中的多个孔1270a可以在光轴方向上与保持器1270中的凹槽1272重叠。例如,多个孔1270a中的每个孔可以具有形成在凹槽1272的底部1272a中的开口。形成在底部1272a中的多个孔1270a中的每个孔的开口可以相对于保持器1270的第二表面1070b在光轴方向上具有高度差。834.例如,多个孔1270a可以穿过保持器1270中的凹槽1272的底部1272a形成。835.此处,保持器1270中的凹槽1272可以用于避免连接弹性构件1280与保持器1270之间发生空间干涉,以在连接弹性构件1280在ois操作期间弹性变形时允许容易的弹性变形。836.连接弹性构件1280可以联接至保持器1270。连接弹性构件1280可以用于允许ois可移动单元移动并允许传输导电信号。例如,连接弹性构件1280可以将支承构件1220导电地连接至第四电路板1260的端子1262。837.例如,连接弹性构件1280可以设置在保持器1270下方。838.连接弹性构件1280可以经由粘合构件等联接至保持器1270的第二表面1070b。839.连接弹性构件1280可以将支承构件1220导电地连接至第四电路板1260,并且可以包括弹性变形部分,该弹性变形部分是可弹性变形的。连接弹性构件1280的弹性变形部分可以联接至支承构件1220。840.连接弹性构件1280可以包括与支承构件1220对应的连接弹簧1281(参见图40)。图18中所示的连接弹簧1281的描述可以在修改或未修改的情况下适用于连接弹簧1281。841.例如,连接弹性构件280可以包括多个连接弹簧1281。多个连接弹簧1281可以对应于相应的支承构件1220。多个连接弹簧1281可以设置成彼此在导电方面隔离或间隔开。842.连接弹簧1281中的每个链接弹簧1281可以包括与第四电路板1260的第二端子1262联接的第一联接器31、与支承构件1220联接的第一联接器32、以及将第一联接器31连接至第二连接器32的连接器33。843.连接弹簧1281的第一联接器31可以由保持器1270支承。例如,第一联接器31可以设置在保持器1270的第二表面1070b上,并且可以由保持器1270的第二表面1070b支承。844.例如,第一联接器31可以邻近保持器1270中的至少一个凹槽1272设置在保持器1270的第二表面1070b上。845.例如,第一联接器31可以包括第一部分31a和第二部分31b,第一部分31a由保持器1270支承并连接至连接器33,第二部分31b连接至第一部分31a并联接至第四电路板1260的第二端子262。846.例如,第一联接器31的第一部分31a可以在光轴方向上与保持器1270的第二表面1070b重叠,并且第二部分31b可以在光轴方向上不与保持器1270的第二表面1070b重叠。第一联接器31的第二部分31b的至少一部分可以在光轴方向上与第四电路板1260的第二端子1252重叠。例如,第二部分31b可以沿从保持器1270的内表面朝向第四电路板1260的第二端子1252的方向突出。847.第二联接器32可以经由焊料1902或导电粘合构件联接至支承构件1220的一个端部(例如,下端部)。例如,第二联接器32可以设置成在光轴方向上与保持器1270中的孔1270a重叠。第二联接器32可以具有孔32a,支承构件1220延伸穿过孔32a。848.穿过第二联接器32中的孔32a的支承构件1220的一个端部可以经由导电粘合构件或焊料1902直接联接至第二联接器32,由此第二联接器32可以导电地连接至支承构件1220。849.例如,第二联接器32是这样的区域,在该区域处,焊料1902设置成联接至支撑构件1220,第二联接器32可以包括孔32a和位于孔32a周围的区域。尽管第二联接器32可以构造成具有圆形形状,但本公开内容不限于此。在另一实施方式中,第二联接器32可以构造成具有多边形形状(例如,四边形形状)或椭圆形形状。850.第二联接器32和连接器33可以在光轴方向上与保持器1270中的凹槽1272重叠。例如,第二联接器32和连接器33可以设置在保持器1270中的凹槽1272中。例如,第二联接器32和/或连接器33可以设置成与保持器1270间隔开。851.例如,连接弹性构件1280可以包括四个组1001a、1002a、1003a和1004a,所述四个组1001a、1002a、1003a和1004a对应于第四电路板1260的四个侧部部分(侧向侧表面)或保持器1270的四个侧部部分(或侧向侧表面)。852.多个组1001a、1002a、1003a和1004a中的每个组可以包括多个连接弹簧1001-1至1001-9、1002-1至1002-9、1003-1至1003-9和1004-1至1004-9。853.此外,第四电路板1260的端子262可以被分类成与连接弹性构件1280的组1001a至1004a对应的多个组。第四电路板1260的多个组中的每个组可以包括多个端子p1至p9、s1至s9、r1至r9、或q1至q9。854.例如,第四电路板1260的多个端子p1至p9、s1至s9、r1至r9和q1至q9中的每个端子可以经由焊料联接至多个连接弹簧1001-1至1001-9、1002-1至1002-9、1003-1至1003-9和1004-1至1004-9中的对应的一个连接弹簧。855.对图15中所示的连接弹性构件280的组1a、2a、3a和4a的描述可以在修改或未修改的情况下适用于图43中所示的连接弹性构件1280的多个组1001a、1002a、1003a和1004a。856.参照图41,连接弹性构件1280还可以包括本体1085a和包括延伸部1085b的绝缘构件1285。连接弹性构件1280还可以包括一个或更多个虚设构件(或虚设图案)1028-1至1028-4。对绝缘构件285和虚设构件28-1至28-4的描述可以在修改或未修改的情况下适用于绝缘构件1285和虚设构件1028-1至1028-4。857.例如,绝缘构件1285可以对连接弹簧1001-1至1001-9、1002-1至1002-9、1003-1至1003-9和1004-1至1004-9进行支承,并且可以联接或附接至保持器1270的第二表面1070b。858.例如,绝缘构件1285可以在其中具有孔或腔。绝缘构件1285中的孔或腔可以与第一电路板1800中的孔1800a、第三电路板1250中的孔1501以及保持器1270中的孔1071在光轴方向上对应、重叠或对准。859.例如,本体1085a可以具有孔或腔,该孔或腔与第一电路板1800中的孔1800a、第三电路板1250中的孔1501和保持器1270中的孔1071中的至少一者在光轴方向上对应、重叠或对准。860.延伸部1085b可以从本体1085a朝向保持器1270的外表面延伸。例如,延伸部1085b可以设置成环绕保持器1270中的凹槽1272。861.支承构件1220可以将第一电路板1800导电地连接至连接弹性构件1280。862.支承构件1220可以包括与连接弹性构件1280的组1001a、1002a、1003a和1004a对应的多个组。支承构件的多个组中的每个组可以包括多个支承构件(或布线)。863.例如,支承构件1220可以包括与多个连接弹簧对应的多个支承构件。支承构件1220可以替代性地被称为“布线”。864.支承构件1220可以在其一个端部处联接至第一电路板1800,并且在其另一个端部处联接至连接弹簧1281的第二联接器32。865.例如,支承构件1220的一个端部可以延伸穿过第一电路板1800中的孔1800b,并且可以经由第一焊料1901联接至第一电路板1800的第一表面(例如,上表面)1044a,并且支承构件1220的另一个端部可以延伸穿过连接弹簧1281的第二联接器32中的孔32a,并且可以经由第一焊料1901联接至第二联接器32的下部部分或下表面。例如,支承构件1220的一个端部可以联接且导电地连接至第一电路板1800的端子1800b。866.支承构件1220可以延伸穿过壳体1450的避让区域1041、第三电路板1250中的孔1250a和保持器1270中的孔270a,并且可以避免与壳体1450、第二电路板1250和保持器1270发生空间干涉。867.支承构件1220可以实施为是导电的并提供弹性支承的构件,例如,悬线、板簧或螺旋弹簧。868.图像传感器单元1350还可以包括滤光器1610。图像传感器单元1350还可以包括滤光器保持器1600,滤光器1610设置、坐置或接纳在滤光器保持器1600中。滤光器保持器1600可以替代性地被称为“传感器基座”。869.滤光器1610可以用于防止穿过镜筒1400的光中的某个频率范围中的光入射在图像传感器1810上。图9中所示的滤光器的描述可以在修改或未修改的情况下适用于滤光器1610。870.例如,滤光器保持器1600可以设置在af操作单元1100下方。例如,滤光器保持器1600可以设置在第四电路板1260上方。871.滤光器保持器1600可以联接至第四电路板的位于图像传感器1810周围的区域,并且可以通过第一电路板1800中的孔1800a和第三电路板1250中的孔1501暴露。例如,滤光器保持器1600可以通过第一电路板1800中的孔1800a和第三电路板1250中的孔1501可见。872.例如,滤光器保持器可以联接至第四电路板1260的第一表面(例如,上表面)的位于坐置区域1260a周围的区域。尽管坐置区域1260a可以是与图39a中的第四电路板1260的第一表面相同的表面,但本公开内容不限于此。在另一实施方式中,坐置区域1260a可以是凹槽或突起。873.第三电路板1250中的孔1501可以使设置在第四电路板1260处的滤光器保持器1600、以及穿过该孔设置在滤光器保持器1600处的滤光器1610暴露。874.滤光器保持器1600可以具有形成在供安装或设置滤光器1610的区域中的孔1060a,以便允许已经穿过滤光器1610的光入射在图像传感器1810上。滤光器保持器1600中的孔1060a可以具有沿光轴方向穿过滤光器保持器1600形成的通孔的形式。例如,滤光器保持器1600中的孔1060a可以穿过滤光器保持器1600的中央形成,以便对应于或面向图像传感器1810。滤光器保持器1600可以具有从其上表面凹陷以便在其中接纳滤光器1610的坐置部分1500。滤光器1610可以设置、坐置或安装在坐置部分1500中。坐置部分1500可以构造成环绕孔1060a。在另一实施方式中,滤光器保持器1600的坐置部分1500可以构造成具有从滤光器1610的上表面突出的突起的形式。875.图像传感器1350还可以包括设置在滤光器1610与坐置部分1500之间的粘合构件1612。因此,滤光器1610可以经由粘合构件1612联接或附接至滤光器保持器1600。例如,粘合构件1612和1061可以是环氧树脂、热硬化粘合剂或紫外线硬化粘合剂。876.相机模块1010还可以包括盖构件1300和基座1210,以便在其中接纳af操作单元1100和图像传感器单元1350,保护af操作单元1100和图像传感器单元1350免受外部冲击,并防止从外部引入异物。877.盖构件1300可以构造成具有盒子的形式,盖构件1300在其下表面处敞开放并且包括上板1301和侧板1302。盖构件1300的侧板1302的下部部分可以联接至基座1210。盖构件1300的上板1301可以构造成具有多边形形状,例如,四边形形状或八边形形状。878.盖构件1300可以具有形成在其上板1301中的孔,联接至线圈架1110的透镜(未示出)通过该孔暴露于外部光。盖构件1300的侧板1302中的一个侧板1可以设置有孔1304,电路板1190的端子构件1905通过该孔暴露。879.基座1210可以设置在保持器1270下方。基座1210可以具有与盖构件1300一致或对应的形状,例如,四边形形状。880.例如,尽管基座1210可以呈具有在光学方向上穿过基座1210形成的通孔形式的孔,但在另一实施方式中可以省去该孔。881.基座1210可以具有阶梯部1211(参见图44a),当盖构件1300被粘合地固定至该阶梯部1211时,粘合剂被施加至该阶梯部。此处,阶梯部1211可以对联接至阶梯部1211的盖构件1300的侧板1302进行导引。基座1210的阶梯部1211可以使用粘合剂等附接或固定至盖构件1300的侧板1302的下端部。882.尽管基座1210的下部分或下侧部可以由底盖1219封闭或阻挡,但本公开内容不限于此。在另一实施方式中,可以省去底盖1219。883.将关于ois操作来描述根据实施方式的图像传感器单元1350的固定部分和可移动部分。884.图像传感器单元1350可以包括固定部分、可移动部分(或移动部分)、以及构造成将固定部分连接和联接至可移动部分的弹性支承构件1220和1280。可移动部分可以替代性地被称为“ois可移动部分”(或“ois移动部分”)。ois可移动部分可以相对于固定部分在垂直于光轴oa的方向上可移动。885.借助弹性支承构件1220和1280,设置在ois固定部分下方的ois可移动部分可以在与固定部分以预定距离间隔开的状态下定位。换句话说,在可移动部分经由支承构件1220悬挂于固定部分的状态下,可移动部分可以通过由磁体1023与线圈之间的相互作用而产生的电磁力而相对于固定部分可移动。886.弹性支承构件1220和1280的一个端部(例如,支承构件1220的一个端部)可以联接至第一电路板1800,并且弹性支承构件1220和1280的另一个端部(例如,连接弹簧1281的第一部分31)可以联接至第二电路板1900,例如,第四电路板1260。887.经由弹性支承构件1220和1280,第一电路板1800可以导电地连接至第二电路板1900,例如第四电路板1260。888.通过由第二线圈1230与磁体1023之间的相互作用而产生的电磁力,ois可移动部分可以相对于固定部分沿垂直于光轴的方向移动。889.例如,借助磁体1023与线圈1230之间的相互作用,图像传感器1810可以沿垂直于光轴oa的方向移位或倾斜,或者可以绕光轴oa旋转。例如,光轴方向可以是与图像传感器1810的一个表面垂直的方向。例如,图像传感器1810的一个表面可以是图像传感器1810的上表面。替代性地,图像传感器1810的一个表面可以是与透镜模块1400或滤光器1610的下表面对应或面向的表面。例如,图像传感器1810的一个表面可以是活动区域。890.借助支承构件1220和连接弹性构件1280,ois可移动单元可以被弹性地支承,并且可以在垂直于光轴的方向上可移动。891.固定部分可以包括第一电路板1800、壳体1450和磁体1023。此外,固定部分可以包括基座1210、盖构件1300和底盖1219中的至少一者。此外,固定部分可以包联接至第一电路板1800的元件,例如,运动传感器1820和电容器。892.ois可移动部分可以包括第三电路板1250、第二线圈1230、第四电路板1260和图像传感器1810。此外,ois可移动部分可以包括保持器1270。893.此外,ois可移动部分可以包括联接至第三电路板1250的元件,例如,第二位置传感器1240、运动传感器1820、控制器830、存储器1512和电容器1514。此外,ois可移动部分可以包括滤光器保持器1600和滤光器1610。894.例如,ois可移动部分可以包括联接至连接弹性构件1280的第四电路板1260、联接至第四电路板1260的图像传感器1810和第三电路板1260、以及联接至第三电路板1250的保持器1270,并且可以由支承构件1220和连接弹性构件1280弹性地支承。895.磁体1023可以设置在固定部分处,并且第二线圈1230可以设置在ois可移动单元处。ois可移动部分可以通过由磁体1023与第二线圈1230之间的相互作用产生的电磁力而相对于固定部分移动或倾斜。896.参照图46和图47,为了允许ois可移动部分通过由磁体1023与第二线圈1230之间的相互作用产生的电磁力而相对于固定部分移动或倾斜,ois可移动部分可以与ois固定部分间隔开。897.例如,保持器1270、第二电路板1900和图像传感器1810可以与第一电路板1800、壳体1450和基座1210间隔开。898.例如,在ois可移动部分的初始位置处,保持器1270的外表面可以与基座1210的内表面间隔开预定距离d1。899.此外,在ois可移动部分的初始位置处,保持器1270的下表面和第四电路板1260的下表面可以与基座1210的前表面(或上表面)间隔开预定距离h1。例如,在ois可移动部分的初始位置处,保持器1270的下表面和第四电路板1260的下表面可以与底盖1219的前表面(或上表面)间隔开。900.例如,在ois可移动部分的初始位置处,焊料1902可以与底盖1219的前表面(或上表面)间隔开预定距离h2。此外,在ois可移动部分的初始位置处,焊料1902可以与基座1210的前表面(或上表面)间隔开。901.ois可移动单元的初始位置可以是在没有电力或驱动信号施加至第二线圈1230的状态下ois可移动部分的初始位置,或者是由于支承构件1220和连接弹性构件1280仅因ois可移动部分的重量弹性地变形而导致ois可移动部分所处的位置。902.另外,ois可移动部分的初始位置可以是当重力沿从第一电路板1800至第三电路板1250的方向作用时或当重力沿从第三电路板1250至第一电路板1800的方向作用时,ois可移动部分所处的位置。903.图49图示了将图像传感器1810、滤光器保持器1600和滤光器1610安装至第四电路板1260的过程。904.参照图49,可以首先通过芯片键合将图像传感器1810联接、固定或附接至第四电路板1260的坐置区域1260a(s110)。905.尽管图像传感器1810可以是电荷耦接设备(ccd)、金属氧化物半导体mos、cpd图像传感器和cid图像传感器中的一者,但本公开内容不限于此。906.随后,可以经由布线1088将图像传感器1810接合至第四电路板1260,使得图像传感器1810导电地连接至第四电路板1260(s120)。907.随后,可以经由粘合构件1061将其上安装有滤光器1601的滤光器保持器1600安装在第三电路板1260上(s130)。例如,滤光器1610可以经由粘合构件1612联接至滤光器保持器1600,并且然后滤光器保持器1600可以联接至第四电路板1260。在另一实施方式中,滤光器保持器1600可以联接至第四电路板1260,并且然后滤光器1610可以联接至滤光器保持器1600。908.在比较示例中,图像传感器可以安装在附加的传感器板上,并且然后传感器板可以连接至第四电路板。909.在比较示例中,传感器板可以通过焊接连接至第四电路板。焊接是附加的过程,并使得难以将传感器板连接至第四电路板。此外,在比较示例中,在将传感器板焊接至第四电路板期间,可能会在图像传感器处产生噪音,并且图像传感器可能会受到噪音的影响。另外,在比较示例中,由于焊接传感器板的过程中的公差堆叠,可能在透镜模块与图像传感器之间的对准以及透镜模块与盖构件之间的对准方面存在困难。910.在本实施方式中,比较示例中的传感器板被熔接至第四电路板,以便实现单个集成第四电路板1260。在该示例中,图像传感器1810从图像传感器单元1350的上方移动至第四电路板,并且然后通过芯片键合而接合至第四电路板1260,并且图像传感器通过引线键合而导电地连接至第四电路板。随后,滤光器保持器1600和滤光器1610从图像传感器单元1350上方移动至第四电路板1260,并联接至第四电路板1260。911.与比较示例相比,本实施方式能够简化组装相机的过程。此外,可以减少图像传感器的信号路径中的焊接点的数目,并且可以防止图像传感器变得不可操作或者可以抑制图像噪音。912.另外,与比较示例相比,本实施方式能够简化组装过程,并且因此能够消除公差堆叠。因此,在管理透镜模块1400的对准方面也是有利的。913.此外,与比较示例相比,本实施方式能够通过减少部件的数目和过程的数目来提供降低材料成本和制造成本的效果。914.尽管图39a和图40图示了这样的实施方式:在该实施方式中,第三电路板1250和第四电路板1260单独地设置,并且第三电路板1250的端子1251和第四电路板1260的端子1261彼此联接,以便将第三电路板1250导电地连接至第四电路板1260,但本发明的实施方式不限于此。在另一实施方式中,第三电路板和第四电路板可以整体地形成为单个板。此处,第四电路板的端子1262可以形成在该单个板的后表面上,并且可以联接至连接弹性构件1280。915.图22中所示的连接弹性构件280-1可以是连接弹性构件1280的另一实施方式。因此,图22中所示的连接弹性构件280-1的描述可以在修改或未修改的情况下适用于连接弹性构件1280。916.例如,板部分280-1中的孔79的表面积可以大于第四电路板1260的第二表面1060b的表面积。例如,板部分280-1中的孔可以使第四电路板1260的第二表面1060b和第四电路板1260的穿过该孔的端子262暴露。917.板部分280a可以设置在保持器1270的第二表面1070b上,并且可以经由粘合构件等联接或附接至保持器1270的第二表面1070b。918.在另一实施方式中,图29中所示的图像传感器单元1350可以代替图23中所示的图像传感器单元250而被应用。例如,根据另一实施方式的相机模块20可以包括透镜模块1400和图像传感器单元1350,并且图23的描述可以在修改或未修改的情况下被应用。919.例如,根据另一实施方式的相机模块20的透镜模块1400可以不在光轴方向上移动,而是可以在光轴方向上被固定。例如,在另一实施方式中,透镜模块1400可以不在垂直于光轴的方向上移动,并且可以在垂直于光轴的方向上被保持。相机模块20还可以包括图29中所示的盖构件1300。例如,透镜模块1400可以联接、附接或固定至保持器1600或第一电路板1800。例如,透镜模块1400的下部部分、下端部或下表面可以联接、附接或固定至保持器1600的上表面或第一电路板1800的上表面。替代性地,例如,透镜模块1400可以联接、附接或固定至盖构件1300。920.随着相机技术的发展,图像的分辨率变高,并且因此图像传感器的尺寸增加。由于图像传感器的尺寸增加,因此透镜模块的尺寸和用于使透镜模块移位的致动器的尺寸也增加。因此,不仅透镜模块的重量增加,而且用于使透镜模块移位的其他致动器组件的重量也增加。921.根据本发明的实施方式,使用以透镜移位方式操作的af操作单元(或第一致动器)1100来执行自动对焦,并且使用以图像传感器移位方式操作的图像传感器单元(或第二致动器)1350来执行光学图像稳定(ois),从而提高相机设备的可靠性。922.该实施方式能够使用传感器移位方式执行5轴手抖动校正。例如,5轴手抖动可以包括两个角度手抖动(例如,俯仰和偏转)、两个移位手抖动(例如,x轴移位和y轴移位)和一个旋转手抖动(例如,滚动)。923.图50图示了根据实施方式的控制器820。图51图示了存储在存储器1512中的校正值的实施方式。图52是图示了设定图51中所示的校正值的方法的视图。924.参照图50和图52,控制器830可以包括校正单元812和驱动单元813。控制器830还可以包括模数转换器811。925.控制器830可以接收ois位置传感器的输出。控制器830可以接收存储在存储器1512中的校正值cv。例如,ois位置传感器可以是第一传感器1240a、第二传感器1240b或第三传感器1240c。926.例如,ois位置传感器的输出可以是模拟信号或数字信号。927.例如,当ois位置传感器仅包括霍尔传感器时,ois位置传感器的输出可以是模拟信号,并且控制器830还可以包括模数转换器811,该模数转换器构造成将作为模拟信号的ois位置传感器的输出转换为数字信号(或数字值)。在下文中,数字值可以替代性地被称为“数字代码”。928.例如,当ois位置传感器是包括霍尔传感器的驱动器is时,ois位置传感器的输出可以是数字信号或数字值,并且可以省去模数转换器811。929.校正单元812可以基于从存储器1512接收的校正值cv来校正ois位置传感器的输出。930.例如,校正单元812可以输出通过从ois位置传感器的输出中减去校正值cv而获得的结果cs。在另一实施方式中,校正单元812可以输出通过将校正值cv与ois位置传感器的输出相加而获得的结果。这样做的原因是为了消除ois位置传感器的由ois线圈1230的磁场的影响或干扰而导致的输出。此处,ois线圈1230可以是与ois位置传感器对应的线圈。例如,第一ois线圈单元1230-1可以对应于第一传感器1240a,第二ois线圈单元1230-2可以对应第二传感器1240b,并且第三ois线圈单元1230-3可以对应于第三传感器1240c。931.例如,尽管校正单元812可以包括逻辑门、比较器、减法器和加法器中的至少一者,但本公开内容不限于此。校正单元812可以具有任何其他构造,只要其具有能够基于校正值cv改变或校正ois位置传感器的输出的电路构造即可。932.驱动单元813可以接收校正单元812的输出cs、基于所接收的校正单元813的输出控制用于驱动与ois位置传感器对应的ois线圈1230的驱动信号ds、并将控制器驱动信号ds供应至ois线圈1220。933.参照图51,存储器1512可以在其中存储与用于驱动ois线圈1230-1、1230-2和1230-3的驱动值对应的校正值。校正值可以以查找表的形式存储。此处,驱动值可以替代性地被称为“驱动代码值”、“代码值”或“控制值”。934.用于驱动ois线圈1230-1、1230-2和1230-3的驱动值可以包括与ois行程范围对应的驱动代码值(a1至an,n是大于1的自然数或有理数)。例如,驱动值可以是数字值或数字代码,其由k位(例如,k是大于1的自然数或有理数)构成。此处,ois行程可以是ois可移动部分在垂直于光轴的方向上的位移,并且ois行程范围可以是ois可移动部分在垂直于光轴的方向上的移动范围(或移动区域)。935.校正值可以包括与驱动代码值(a1至an,n是大于1的自然数或有理数)对应的校正代码值(c1至cn)。936.当在不存在磁体(例如,1023a至1023d)的条件下向ois线圈(例如,1230-1)施加与驱动值a1至an对应的驱动电流时,可以通过施加的驱动电流从ois线圈(例如,1230-1)产生磁场。ois位置传感器(例如,1240a)可以输出与ois线圈(例如,1230-1)的磁场的检测结果对应的输出(或输出信号)。937.此处,第一传感器1240a的输出可以由通过施加的驱动电流产生的磁场引起。由于磁场是妨碍正确ois正确操作的不期望的因素,因此优选的是出于正确ois操作的目的而消除磁场。938.可以基于第一传感器1240a的输出来设定校正值c1至cn。例如,校正值c1至cn可以是与ois线圈(例如,1230-1)的磁场的检测结果对应的位置传感器的输出,并且可以是数字值。939.尽管图52图示了第一传感器1240a和对应于第一传感器1240的第一ois线圈1230-1,但其描述可以适用于第二传感器1240b和对应于第二传感器1240b的第二ois线圈1220-2、以及第三传感器1240c和对应于第三传感器1240c的第三ois线圈1240-3。940.例如,尽管存储器1512可以包括其中存储有分别与第一至第三ois位置传感器1240a、1240b和1240c对应的校正值的查找表,但本公开内容不限于此。在另一实施方式中,可以使用图52中所示的单个查找表来校正第一传感器至第三传感器1240a、1240b和1240c的各自的输出。941.图53图示了存储在存储器1512中的校正值cv1的另一实施方式。图54是图示了设定图53中所示的校正值cv1的方法的视图。尽管校正值cv在图52中在从相机模块1010移除了磁体1023a至1023d的状态下设定,但是校正值cv1也可以在图54中在相机模块1010中设置磁体1023a至1023d的状态下设定。942.首先,在ois可移动部分的初始位置处,ois位置传感器(例如,1240a)可以检测与ois位置传感器(例如,1240a)对应的磁体(例如,1023a)的磁场的强度,并且可以输出与检测的结果对应的输出。与在ois可移动部分的初始位置处的ois位置传感器(例如,1240a)的输出对应的数字值m1或数字代码可以存储在存储器1512中。943.m1可以是在没有驱动信号施加至ois线圈1230-1至1230-4的状态下由磁体(例如,1023a)的磁场引起的ois位置传感器(例如,1240a)的输出。944.例如,在ois可移动部分的初始位置处的ois位置传感器的输出可以是数字值,并且数字值可以是从模拟信号转换的。945.例如,校正值cv1可以被称为“第一校正值”,并且m1可以被称为“第二校正值”。存储器1512可以在其中存储第一校正值cv1和第二校正值m1。第一校正值csv1和第二校正值m1可以是数字值或数字代码,并且可以以查找表的形式存储在存储器1512中。946.随后,设置在相机模块1010中的磁体(例如,1023a)可以借助于固定设备比如夹具固定成不可移动。当将与驱动值a1至an对应的驱动电流施加至ois线圈(例如,1230-1)时,可以通过施加至ois线圈的驱动电流从ois线圈(例如,1230-1)产生磁场。947.位置传感器(例如,1240a)可以输出与第一磁场和第二磁场的检测结果对应的输出(或输出信号)。948.例如,第一磁场可以是在ois可移动部分的初始位置处的磁体(例如,1023a)的磁场,并且第二磁场可以是由与驱动值a1至an对应的驱动电流产生的ois线圈(例如,1230-1)的电磁场。949.可以基于第一传感器1240a的输出来设定第一校正值cv1。例如,第一校正值cv1可以是ois位置传感器(例如,1240a)的下述输出:该输出与在ois可移动部分的初始位置处的磁体(例如,23a)的磁场和由与驱动值a1至an对应的驱动电流产生的ois线圈(例如,1230-1)的磁场的检测结果对应,并且第一校正值cv1可以是数字值。950.例如,第一校正值b1至bn可以是通过将由第一磁场引起的ois位置传感器(例如,1240a)的输出与由第二磁场引起的ois位置传感器(例如,1240a)的输出相加而获得的值。951.在另一实施方式中,存储器1512可以在其中存储第三校正值。第三校正值可以是通过从第一校正值cv1减去第二校正值m1而获得的值(b1-m1至bn-m1)之一。952.尽管图53图示了第一传感器1240和与第一传感器1240a对应的第一ois线圈1230-1,但其描述可以在修改或未修改的情况下适用于第二传感器1240b和与第二传感器1240b对应的第二ois线圈1230-2、以及第三传感器1240c和与第三传感器1240c对应的第三ois线圈1230-3。953.图55图示了根据另一实施方式的ois位置传感器1240a的布置。图55中所示的ois位置传感器1240a的描述可以在修改或未修改的情况下适用于其他传感器1240b和1230c。954.参照图55,ois位置传感器(例如,1240a)可以设置在对应的ois线圈(例如,1230-1)下方。其原因是减少由ois线圈单元(例如,1230-1)的磁场引起的对位置传感器的输出的影响。955.例如,ois位置传感器1240a可以在垂直于光轴方向的方向上不与ois线圈单元1230-1重叠。例如,ois位置传感器(例如,1240a)可以设置在第二电路板1900下方,并且可以在光轴方向上不与ois线圈单元(例如,1230-1)重叠。956.图55中所示的实施方式可以包括保持器1270-1以代替图39a中所示的保持器1270。957.保持器1270-1可以设置在第一电路板1800下方。保持器1270-1可以设置成与第一电路板1900间隔开,并且保持器1270可以联接至第二电路板1900。958.保持器1270-1可以接纳或支承第二线圈1230。保持器1270-2可以用于对第二绕组1240进行支承,以便将第二线圈1240与第二电路板1900间隔开。959.例如,保持器1270-1的下部部分、下表面或下端部可以联接至第二电路板1900的上部部分、上表面或上端部。960.保持器1270-1可以具有与ois位置传感器1240对应的孔1041a。例如,保持器1270-2可以具有形成在与第一传感器至第三传感器1240a、1240b和1240c中的每一者对应的位置处的孔1041a。例如,孔1041a可以是穿过保持器1270-1形成的通孔。ois位置传感器1240可以设置在保持器1270-1中的孔1041a中。961.尽管在图55中所示的实施方式中减少了由ois线圈单元(例如,1230-1)的磁场引起的对ois位置传感器的输出的影响,但该输出仍可能受到磁场的影响。因此,为了更准确的ois反馈操作,图50至图54和图56至图58的描述也可以适用于图55中所示的实施方式。962.在另一实施方式中。图50至图54和图54至图58的描述可以在修改或未修改的情况下适用于图1至图27中所示的实施方式。963.图56图示了根据另一实施方式的控制器830a。964.参照图56,控制器830a可以包括校正单元812a、模数转换器(adc)811a、驱动单元813和数模转换器(dac)814。965.当第一传感器1240a的输出是模拟信号(例如,模拟电压或电流)时,校正单元812a可以接收作为模拟信号的ois位置传感器1240a的输出。966.数模转换器(dac)814可以从存储器1512接收校正值cv、cv1,并且可以使用所接收的校正值cv、cv1创建模拟信号as。967.校正单元812a可以接收与驱动值(例如,a1至an)对应的ois位置传感器(例如,1240a)的输出和数模转换器814的输出。968.例如,校正单元812a可以输出ois位置传感器(例如,1240a)的输出与数模转换器814的输出之间的差。969.例如,校正单元812a可以输出通过从ois位置传感器(例如,1240a)的输出ht减去模拟转换器814的输出as而获得的结果cs1。例如,校正单元812a可以实施为比较器、差分放大器、运算放大器等。970.例如,校正单元812a可以对ois位置传感器(例如,1240a)的输出ht和模拟转换器814的输出as执行差分放大,并且可以输出差分放大信号cs1。971.模数转换器811a可以对校正单元812a的输出cs1执行模数转换,并且可以输出与模数转换的结果对应的数字值dcs或数字代码。972.驱动单元813可以接收模数转换器811a的输出dcs,可以基于所接收的输出dcs来控制用于激活与ois位置传感器对应的ois线圈230的驱动信号ds,并且可以将所控制的驱动信号ds供应至ois线圈230。973.图50和图56的描述可以适用于其他位置传感器1240b和1240c。974.图57是图示了根据实施方式的控制器830、830a的操作的流程图。975.参照图57,控制器830、830a向ois线圈单元(例如,1230-1)施加或供应与用于使ois驱动单元、例如图像传感器1810移动至ois行程范围中的目标位置的驱动值(例如,a2)对应的驱动信号(s1110)。976.控制器830、830a接收与ois线圈单元(例如,1230-1)对应的ois位置传感器(例如,1240a)的输出(s120)。977.控制器830、830a从存储器1512接收与驱动值(例如,a2)对应的校正值(例如,c2)(s1130)。978.控制器830、830a基于校正值(例如,h2)校正ois位置传感器(例如,1240a)的输出(s1140)。979.例如,控制器830、830a可以从ois位置传感器(例如,1240a)的输出减去校正值(例如,c2),并且可以输出减去的结果。980.图58是图示了校正ois位置传感器(例如,1240a)的输出的实施方式的表。图58可以利用图51中所示的查找表。981.参照图58,控制器830、830a可以从与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn中减去存储在查找表中的校正值c1至cn,并且可以输出减去的结果(h1-c1至hn-cn)。982.图59是图示了校正ois位置传感器(例如,1240a)的输出的另一实施方式的表。图59可以利用图53中所示的查找表。983.参照图59,控制器830、830a可以使用存储在查找表中的第一校正值b1至bn和第二校正值来校正与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn,并且可以输出校正的结果。984.例如,控制器830、830a可以从与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn中减去第一校正值b1至bn,并且可以输出通过将第二校正值m1与减去的结果相加而获得的值h1-b1 m1至hn-bn m1。985.在另一实施方式中,控制器830、830a可以使用图53中所示的第三校正值来校正与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn,并且可以输出校正的结果。986.例如,控制器830、830a可以从与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn中减去第三校正值b1至bn,并且可以输出减去的结果。987.控制器830、830a使用ois位置传感器(例如,1240a)的经校正的输出来控制用于激活ois线圈的驱动值或驱动信号(s1150)。988.存储器1512可以在其中存储与ois可移动部分的位移对应或匹配的ois位置传感器的输出的代码值,以用于ois反馈操作。989.例如,存储器1512可以在其中存储与ois可移动部分在x轴方向上的位移对应或匹配的ois位置传感器的输出的代码值、以及与ois可移动部分在y轴方向上的位移对应或匹配的ois位置传感器(例如,第二传感器1240b)的输出的码值。990.替代性地,例如,存储器1512可以在其中存储与ois可移动部分在x轴方向上或在y轴方向上的位移对应或匹配的ois位置传感器(例如,第三传感器1240c)的输出的代码值。991.图60图示了与ois可动部分在x轴方向上的位移dp1至dpn对应或匹配的第一传感器1240a的输出的代码值代码_1至代码_n。992.当通过模拟或实验按照驱动值a1至an向线圈单元(例如,1230-1)供应驱动信号时,ois可移动部分移动,并且获得与ois可移动部分的位移匹配的第一传感器1240a的输出的代码值(或“坐标代码值”)。此程序称为“校准”。993.此外,通过校准,可以获得与ois可移动部分在y轴方向上的位移对应于或匹配的第二传感器1240b的输出的代码值。994.ois可移动部分的位移可以由通过校准创建的坐标代码值限定或确定,并且可以通过重复模拟和实验确保坐标代码值的可靠性。可以基于可靠的坐标代码值来执行ois反馈操作。995.例如,控制器830、830a可以将以图51至图53中说明的方式被校正的ois位置传感器(例如,1240a)的输出与图60中所示的坐标代码值代码_1至代码_n进行比较,并且可以基于比较的结果控制用于激活ois线圈的驱动值或驱动信号。996.在另一实施方式中,图51中所示的校正值cv或图53中所示的第一校正值、第二校正值或第三校正值可以适用于通过校准创建的坐标代码值。换句话说,可以修正或校正通过校准创建的坐标代码值,并且可以使用校正后的坐标代码值来控制用于激活ois线圈的驱动值或驱动信号。997.例如,可以从通过校准创建的坐标代码值代码_1至代码_n中减去校正值cv(或第三校正值)而获得的结果设定新的坐标代码值,并使用新设定的坐标代码值来控制用于激活ois线圈的驱动值或驱动信号。998.如图39a、图39b和图45中所图示的,ois线圈单元1230-1至1230-4和ois位置传感器1240a至1240c可以设置或安装在第三电路板1250的第一表面1051a上。999.例如,ois线圈单元(例如,1230-1)可以具有形成在其中央的开口或孔,并且ois位置传感器(例如,1240a)可以设置在与ois位置传感器(例如,1240a)对应的ois线圈单元(例如,1230-1)中的开口或孔中。1000.例如,ois位置传感器(例如,1240a)可以在与光轴垂直的方向上或在与第二电路板1900的上表面平行的方向上与和ois位置传感器(例如,1240a)对应的ois线圈单元(例如,1230-1)重叠。1001.如上所述,ois线圈单元1230-1至1230-4和分别与ois线圈元件1230-1至1230-4对应的ois位置传感器1240a至1240c可以设置成与第三电路板1250的第一表面1051a相邻。1002.当将驱动信号施加至ois线圈单元(例如,1230-1)以进行ois操作时,可以从ois线圈单元(例如,1230-1)产生磁场。为了执行准确的ois反馈操作,ois位置传感器1240a的输出必须与仅由固定至ois固定部分的磁体1023a产生的磁场的检测结果对应。然而,由于ois线圈单元1230-1和ois位置传感器1240a彼此相邻地设置,因此ois位置传感器1240a的输出可能会受到由ois线圈1230-1产生的磁场的极大影响,并且因此ois反馈操作的准确性和可靠性可能会劣化。1003.图61图示了关于输入至ois线圈单元(例如,1230-1)的驱动信号和ois位置传感器(例如,1240a)的输出的频率响应特性。在图61中,x轴指示频率,并且y轴指示增益。1004.参照图61,在ois线圈单元(例如,1230-1)中,可能会出现下述现象1038a(称为“卡布里现象()”):在该现象中,ois位置传感器的输出由于磁场的影响而在200hz至300hz之间的频率范围内异常增大或减小。1005.在本实施方式中,通过校正或消除在ois操作期间由从ois线圈单元产生的磁场引起的对ois位置传感器(例如,1240a)的输出的影响,可以防止上述卡布里现象的发生,并且可以准确且可靠地执行ois反馈操作,其结果是可以确保相机模块的手抖动校正的可靠性。1006.此外,由于即使在ois位置传感器和ois线圈单元彼此相邻地设置时也可以借助用于校正ois位置传感器的输出的技术来确保ois反馈操作的可靠性,因此可以提高设置ois位置传感器和ois线圈单元的自由性以降低相机模块的机械高度,并确保在第三电路板1250上有足够的空间来设置其他元件。1007.根据本实施方式的相机模块10或20可以包括在光学仪器中,该光学仪器设计成使用作为光的特性的反射、折射、吸收、干涉、衍射等在空间中形成物体的图像,以扩大视野、记录通过透镜获得的图像或再现图像、执行光学测量,或者传播或传输图像。例如,尽管根据实施方式的光学仪器可以是移动电话、蜂窝电话、智能电话、便携式智能仪器、数码相机、膝上型计算机、数字广播终端、pda(个人数字助理(personaldigitalassistant))、pmp(便携式多媒体播放器(portablemultimediaplayer))、导航设备等,但本公开内容不限于此。此外,任何能够拍摄图像或照片的设备都是可能的。1008.图62是图示了根据实施方式的光学设备200a的立体图。图29是图示了图28中所图示的便携式端子的构型的视图。1009.参照图28和图29,光学设备200a可以包括本体850、无线通信单元710、音频/视频(a/v)输入单元720、感测单元740、输入/输出单元750、存储器单元760、接口单元770、控制器780和电力供应单元790。1010.图28中所图示的本体850具有条形形状,但不限于此,并且可以是各种类型比方说例如滑动型、折叠型、摆动型或旋转型中的任何一种类型,其中,两个或更多个子本体联接成能够相对于彼此移动。1011.本体850可以包括限定端子的外观的壳(外壳、壳体、盖等)。例如,本体850可以被分成前外壳851和后外壳852。端子的各种电子部件可以容纳在于前外壳851与后外壳852之间限定的空间中。1012.无线通信单元710可以包括一个或更多个模块,所述一个或更多个模块使得光学设备200a与无线通信系统之间或光学设备200a与光学设备200a所在的网络之间进行无线通信。例如,无线通信单元710可以包括广播接收模块711、移动通信模块712、无线互联网模块713、近场通信模块714和位置信息模块715。1013.a/v输入单元720用于输入音频信号或视频信号,并且可以包括例如相机721和麦克风722。1014.相机721可以包括根据实施方式的相机模块10、20或1010。1015.感测单元740可以感测光学设备200a的当前状态,比方说例如光学设备200a的打开或关闭、光学设备200a的位置、用户触摸的存在、光学设备200a的定向或光学设备200a的加速/减速,并可以产生感测信号以控制光学设备200a的操作。当光学设备200a例如是滑动式便携式电话时,感测单元740可以感测滑动式便携式电话是打开还是关闭。此外,感测单元740可以感测来自电力供应单元790的电力的供应、接口单元770与外部设备的联接等。1016.输入/输出单元750用于生成例如视觉、听觉或触觉输入或输出。输入/输出单元750可以生成输入数据以控制光学设备200a的操作,并且可以显示在光学设备200a中处理的信息。1017.输入/输出单元750可以包括键盘单元730、显示模块751、声音输出模块752和触摸屏面板753。键盘单元720可以响应于键盘上的输入而生成输入数据。1018.显示模块751可以包括多个像素,多个像素的颜色根据施加至其的电信号而变化。例如,显示模块751可以包括液晶显示器、薄膜晶体管液晶显示器、有机发光二极管、柔性显示器和3d显示器中的至少一者。1019.声音输出模块752可以在例如呼叫信号接收模式、呼叫模式、记录模式、语音识别模式或广播接收模式下输出从无线通信单元710接收的音频数据,或者可以输出存储在存储器单元760中的音频数据。1020.触摸屏面板753可以将由用户对触摸屏的特定区域的触摸而引起的电容变化转换成电输入信号。1021.存储器单元760可以临时存储用于控制器780的处理和控制的程序、以及输入/输出数据(例如,电话号码、消息、音频数据、静止图像、运动图像等)。例如,存储器单元760可以存储由相机721捕获的图像,例如,图片或运动图像。1022.接口单元770用作以下路径:透镜移动装置通过该路径连接至与光学设备200a连接的外部设备。接口单元770可以从外部部件接收电力或数据,并且可以将电力或数据传输至光学设备200a内部的相应构成元件,或者可以将光学设备200a内部的数据传输至外部部件。例如,接口单元770可以包括有线/无线头戴式受话器端口、外部充电器端口、有线/无线数据端口、存储卡端口、用于连接至配备有识别模块的设备的端口、音频输入/输出(i/o)端口、视频输入/输出端口、耳机端口等。1023.控制器780可以控制光学设备200a的一般操作。例如,控制器780可以执行与例如语音呼叫、数据通信和视频呼叫相关的控制和处理。1024.控制器780可以包括用于多媒体回放的多媒体模块781。多媒体模块781可以在控制器780中实施或者可以与控制器780分开实施。1025.控制器780可以执行模式识别处理,该模式识别处理能够将在触摸屏上执行的书写输入或绘图输入分别识别为字符和图像。1026.电力供应单元790可以在控制器780的控制下在接收到外部电力或内部电力时供应操作相应构成元件所需的电力。1027.以上在实施方式中描述的特征、构型、效果等被包括在至少一个实施方式中,但本发明不只限于这些实施方式。另外,在各个实施方式中例示的特征、构型、效果等可以与其他实施方式组合或者由本领域技术人员修改。因此,与这些组合和修改有关的内容应被解释为落入本公开的范围内。1028.工业实用性1029.这些实施方式能够应用于相机模块和包括相机模块的光学设备,其能够执行准确的ois反馈操作并且因此能够确保ois操作的可靠性。当前第1页12当前第1页12
背景技术:
::2.难以将现有的一般相机模块中使用的音圈马达(vcm)的技术应用于超小型、低功率相机模块,并且因此已经积极进行了与之相关的研究。3.对电子产品比如配备有相机的智能电话和移动电话的需求和生产已经增加。用于移动电话的相机朝着高分辨率和小型化发展。因此,致动器也朝着小型化、大口径化和多功能化发展。为了实现用于移动电话的高分辨率相机,需要改进用于移动电话的相机的性能及其附加功能,例如自动对焦、手抖动校正和变焦。技术实现要素:4.技术问题5.实施方式提供了一种相机模块和包括该相机模块的光学设备,该相机模块和包括该相机模块的光学设备能够执行准确的ois反馈操作,并且因此确保ois操作的可靠性。6.技术方案7.在实施方式中,相机模块包括固定部分和可移动部分,该固定部分包括磁体,该可移动部分包括:第一电路板,该第一电路板与固定部分间隔开;位置传感器,该位置传感器设置在第一电路板上;线圈,该线圈设置成面向磁体;以及间隔件,该间隔件设置在第一电路板与线圈之间,其中,间隔件具有孔,并且位置传感器设置成使得位置传感器的至少一部分设置在间隔件的孔中并在光轴方向上磁体重叠。8.间隔件的孔可以在光轴方向上与线圈的至少一部分重叠。位置传感器可以在光轴方向上不与线圈重叠。线圈可以具有形成在其中央中的孔,并且间隔件的孔可以在光轴方向上与线圈的孔重叠。位置传感器可以在光轴方向上与线圈的孔和间隔件的孔两者重叠。9.可以在磁体与位置传感器之间限定有空间。相机模块还可以包括弹性支承构件,该弹性支承构件联接至固定部分和可移动部分两者。固定部分可以包括第二电路板,并且弹性支承构件可以将第一电路板导电地连接至第二电路板。线圈可以联接至间隔件并且可以导电地连接至第一电路板。10.在另一实施方式中,相机模块包括:透镜;图像传感器,该图像传感器设置在与透镜对应的位置处;驱动单元,该驱动单元构造成使图像传感器移动;电路板,该电路板设置成与透镜间隔开;位置传感器,该位置传感器设置在电路板上;以及间隔件,该间隔件设置在电路板上,其中,驱动单元包括磁体和面向该磁体的线圈,其中,间隔件在电路板与线圈之间设置成使线圈与位置传感器间隔开,并且其中,图像传感器沿垂直于光轴方向的方向移动。11.在另一实施方式中,相机模块包括固定部分和可移动部分,该固定部分包括磁体,该可移动部分包括:第一电路板,该第一电路板设置成与固定部分间隔开;保持器,该保持器设置在第一电路板上;线圈,该线圈设置在保持器上以面向磁体;以及位置传感器,该位置传感器设置在第一电路板上以面向磁体;以及支承构件,该支承构件联接至固定部分和可移动部分两者,其中,可移动部分通过磁体与该线圈之间的相互作用沿垂直于光轴方向的方向移动,并且线圈在垂直于光轴方向的方向上不与线圈重叠。12.位置传感器可以安装在第一电路板上,并且可以在光轴方向上不与线圈重叠。固定部分可以包括第二电路板,该第二电路板设置成与第一电路板间隔开。支承构件可以在其一个端部处联接至第二电路板,并且在其另一个端部处联接至第一电路板。支承构件可以将第一电路板连接至第二电路板。13.线圈可以具有形成在其中央中的孔,并且位置传感器可以设置在间隔件的孔下方,并且可以在光轴方向上与间隔件的孔重叠。14.保持器可以在其中具有通孔,该通孔在光轴方向上与位置传感器对应,并且位置传感器可以设置在保持器中的通孔中。保持器可以包括从其上表面突出的联接突出部,并且线圈可以联接至该联接突出部。15.可移动部分可以包括安装在第一电路板上的图像传感器。第一电路板的四个拐角可以设置有从第一电路板的侧向侧表面突出的突起,并且保持器的下表面可以具有坐置凹槽,第一电路板的突起设置在该坐置凹槽中。16.线圈可以包括分别设置在保持器的第一拐角至第四拐角处的第一线圈单元至第四线圈单元,磁体可以包括与第一线圈单元对应的第一磁体、与第二线圈单元对应的第二磁体、与第三线圈单元对应的第三磁体以及与第四线圈单元对应的第四磁体,并且位置传感器可以包括设置在第一线圈单元下方的第一传感器、设置在第二线圈单元下方下的第二传感器以及设置在第三线圈单元下方的第三传感器。第一线圈单元至第四线圈单元可以被单独地激活。17.第一线圈单元至第三线圈单元可以被单独地激活,并且第四线圈单元可以与第一线圈单元至第三线圈单元中的一者一起被激活。18.在又一实施方式中,相机模块包括固定部分和可移动部分,该固定部分包括磁体,该可移动部分包括:第一电路板,该第一电路板设置成与固定部分间隔开;线圈,该线圈设置成面向磁体;保持器,该保持器设置在第一电路板与线圈之间;以及位置传感器,该位置传感器设置在第一电路板上以面向磁体,其中,线圈在其中具有第一孔,保持器在其中具有形成在与第一孔对应的位置处的第二孔,并且位置传感器的至少一部分设置在保持器中的第二孔中。19.有益效果20.如从以上描述中明显的,由于实施方式被构造成使得ois位置传感器设置成在垂直于光轴的方向上不与ois线圈单元重叠,因此可以减少由ois线圈单元的磁场引起的对ois位置传感器的输出的影响、执行准确的ois反馈操作、并确保ois操作的可靠性。21.此外,由于实施方式消除了由从线圈产生的磁场对位置传感器的输出的影响,因此可以执行准确的ois反馈操作并确保ois操作的可靠性。附图说明22.图1是根据本发明的实施方式的相机模块的立体图;23.图2是图1中所示的相机模块的分解立体图;24.图3是图1中所示的相机模块的、从中移除了盖构件的组装立体图;25.图4是图2中所示的af(自动对焦)操作单元的分解立体图;26.图5是图4中所示的线圈架、感测磁体、平衡磁体、第一线圈、电路板、第一位置传感器和电容器的立体图;27.图6是线圈架、壳体、电路板和上弹性构件的立体图;28.图7是壳体、线圈架、下弹性构件、磁体和电路板的底部立体图;29.图8是图像传感器单元的立体图;30.图9是图像传感器单元的分解立体图;31.图10是图9中所示的第二电路板和壳体的立体图;32.图11是图9中所示的第二电路板、壳体和磁体的立体图;33.图12a是保持器、第二线圈、第一电路板、第二位置传感器、图像传感器、支承构件和连接弹性构件的分解立体图;34.图12b是图12a中所示的保持器、第二线圈、第一电路板、第二位置传感器、滤光器保持器和滤光器的立体图;35.图13a是图12a中所示的保持器的底部立体图;36.图13b是保持器和第一电路板的底视图;37.图14是保持器、图像传感器、第一电路板、支承构件和连接弹性构件的分解立体图;38.图15是保持器、第一电路板和连接弹性构件的底视图;39.图16是保持器、第一电路板、连接弹性构件和绝缘构件的底视图;40.图17是连接弹性构件的局部放大图;41.图18是一个连接弹簧和一个支承构件的底视图;42.图19a是图1中所示的相机模块的沿着线a-b截取的横截面图;43.图19b是图1中所示的相机模块的沿着线c-d截取的横截面图;44.图20是图1中所示的相机模块的沿着线i-j截取的横截面图;45.图21是图8中所示的图像传感器单元的沿着线e-f截取的横截面图;46.图22是图示了根据另一实施方式的连接弹性构件的视图;47.图23是根据本发明的另一实施方式的相机模块的分解立体图;48.图24是图示了根据实施方式的磁体、ois线圈单元、ois位置传感器、保持器和第一电路板的布置的视图;49.图25是图示了根据比较示例的磁体、ois线圈单元、ois位置传感器、第一电路板和保持器的布置的视图;50.图26是图示了关于输入至ois线圈单元的驱动信号和ois位置传感器的输出的频率响应特性的视图;51.图27是图示了关于输入至根据图24中所示的实施方式的ois线圈单元的驱动信号和ois位置传感器的输出的频率响应特性的视图;52.图28是根据实施方式的相机模块的立体图;53.图29是图28中所示的相机模块的分解立体图;54.图30是移除了盖构件的图28中所示的相机模块的组装立体图;55.图31是图29中所示的af操作单元的分解立体图;56.图32是图31中所示的线圈架、感测磁体、平衡磁体、第一线圈、电路板、第一位置传感器和电容器的立体图;57.图33是线圈架、壳体和电路板的立体图;58.图34是壳体、线圈架、下弹性构件、磁体和电路板的底部立体图;59.图35是图29中所示的图像传感器单元的立体图;60.图36是图35中所示的图像传感器单元的分解立体图;61.图37是第一电路板和壳体的立体图;62.图38是图36中所示的第一电路板、壳体和磁体的立体图;63.图39a是第二电路板、第二线圈、第二位置传感器、图像传感器、支承构件和保持器的分解立体图;64.图39b是图39a中所示的第三电路板、第二线圈和第二位置传感器的平面图;65.图40是图36中所示的第二电路板、图像传感器、支承构件、保持器和连接弹性构件的分解立体图;66.图41是图35中所示的图像传感器单元的、从中移除了底盖的底视图;67.图42是连接弹性构件的局部放大图;68.图43是图示了连接弹性构件的连接弹簧的视图;69.图44a是图28中所示的相机模块的沿着线a-b截取的横截面图;70.图44b是图28中所示的相机模块的沿着线c-d截取的横截面图;71.图45是图28中所示的相机模块的沿着线i-j截取的横截面图;72.图46是图35中所示的图像传感器单元的沿着线e-f截取的横截面图;73.图47是图35中所示的图像传感器的沿着线g-h截取的横截面图;74.图52是移除了底盖且被剖开的相机模块的立体图;75.图53图示了存储在存储器中的校正值的另一实施方式;76.图54是图示了图53中所示的设定校正值的方法的视图;77.图55是图示了根据另一实施方式的ois位置传感器的布置的视图;78.图56是图示了根据另一实施方式的控制器的视图;79.图57是图示了根据实施方式的控制器的操作的流程图;80.图58是图示了对ois位置传感器的输出进行校正的实施方式的表格;81.图59是图示了对ois位置传感器的输出进行校正的另一实施方式的表格;82.图60是图示了第一传感器的输出的代码值的视图、这些代码值与ois可移动部分在x轴方向上的位移相对应或相匹配;83.图61是图示了关于输入至ois线圈单元的驱动信号和ois位置传感器的输出的频率响应特性的视图;84.图62是图示了根据实施方式的光学设备的立体图;以及85.图63是图示了图62中所图示的光学设备的构型的视图。具体实施方式86.在下文中,将参照附图详细描述本发明的实施方式。87.本发明的技术思想可以以许多不同的形式实施,并且不应被解释为限于本文中阐述的以下实施方式。在不脱离本发明的技术精神和范围的情况下,实施方式的一个或更多个部件可以选择性地彼此组合或替换。88.除非另有特别限定,否则在本发明的实施方式中使用的术语(包括技术和科学术语)具有与本发明所属领域的普通技术人员通常理解的那些含义相同的含义。还将理解,常用术语,比如词典中定义的那些术语,应当被解释为具有与其在相关技术的上下文中的含义一致的含义。89.在本发明的实施方式中使用的术语仅是为了描述特定实施方式的目的,而并非意在限制本发明。如在本公开和所附权利要求中所使用的,除非上下文另有明确指示,否则单数形式也意在包括复数形式。短语“a、b和c中的至少一者(或一者或更多者)”可以解释为包括a、b、和c的所有组合中的一者或更多者。90.此外,在描述本发明的部件时,可以使用诸如“第一”、“第二”、“a”、“b”、“(a)”或“(b)”之类的术语。由于提供这些术语仅仅是为了将部件彼此区分,因此它们并不限制部件的性质、序列或顺序。91.应当理解,当元件被称为“连结”、“联接”或“连接”至另一元件时,该元件可以直接“连结”、“联接”或“连接”至另一元件,或者可以经由置于其之间的其他元件“连结”、“联接”和“连接”至另一元件。此外,将理解的是,当元件被称为形成在另一元件“上”或“下”时,该元件可以直接地位于另一元件“上”或“下”,或者可以间接地与另一元件相关地设置,其中,在该元件与所述另一元件之间设置有一个或更多个中间元件。另外,还将理解的是,在元件“上”或“下”可以指基于元件的向上方向或向下方向。92.在下文中,af操作单元可以替代性地被称为“透镜移动单元”、“vcm(音圈马达)”、“致动器”或“透镜移动设备”。在下文中,术语“线圈”可以与“线圈单元”互换使用,并且术语“弹性构件”可以与术语“弹性单元”或“弹簧”互换使用。93.在以下描述中,“端子”可以替代性地被称为“焊盘”、“电极”、“导电层”或“接合部分”。94.在下文中,“代码值”可以替代性地被称为“数据值”或“数字值”。95.在下文中,“相机模块”可以替代性地被称为“相机”、“成像设备”或“相机设备”。96.为便于描述,尽管使用成直角的坐标系(x,y,z)来描述根据实施方式的相机模块,但也可以使用一些其他坐标系描述透镜移动装置,并且实施方式不限于此。在各附图中,x轴方向和y轴方向指与光轴、即z轴垂直的方向。作为光轴oa的方向的z轴方向可以被称为“第一方向”,x轴方向可以被称为为“第二方向”,并且y轴方向可以被称为“第三方向”。97.根据本发明的实施方式的相机模块能够执行“自动对焦功能”。此处,“自动对焦功能”用于将对象的图像自动对焦在图像传感器表面上。98.另外,根据实施方式的相机模块可以执行“手抖动校正”的功能。此处,“手抖动校正”的功能可以用于防止捕获的图像的轮廓线由于在捕获静止图像时由用户的手的抖动而引起的振动而变得模糊。99.图1是根据本发明的实施方式的相机模块10的立体图。图2是图1中所示的相机模块10的分解立体图。图3是图1中所示的相机模块的、从中移除了盖构件300的组装立体图。图4是图2中所示的af操作单元100的分解立体图。图5是图4中所示的线圈架110、感测磁体180、平衡磁体185、第一线圈120、电路板190、第一位置传感器170和电容器195的立体图。图6是线圈架110、壳体140、电路板190和上弹性构件150的立体图。图7是壳体140、线圈架110、下弹性构件160、磁体130和电路板190的底部立体图。100.参照图1至图7,相机模块10可以包括af操作单元100和图像传感器单元350。101.相机模块10还可以包括盖构件300、透镜模块400、基座210和底盖219中的至少一者。盖构件300、基座210和底盖219可以限定外壳。102.af操作单元100可以联接至透镜模块400,并且可以使透镜模块400沿光轴oa的方向或平行于光轴的方向移动,以执行相机模块10的自动对焦功能。103.图像传感器单元350可以包括图像传感器810,并且可以使图像传感器810沿垂直于光轴的方向移动,或者可以使图像传感器810相对于光轴倾斜或旋转。图像传感器单元350可以执行手抖动校正的功能。104.例如,图像传感器810可以绕x轴、y轴和z轴中的至少一者进行旋转。105.例如,图像传感器810可以沿x轴方向、y轴方向和z轴方向中的至少一个方向移动。106.例如,图像传感器810可以相对于x轴、y轴和z轴中的至少一者倾斜。107.af操作单元100可以替代性地被称为“透镜移动单元”或“透镜移动装置”。替代性地,af操作单元100可以替代性地被称为“第一致动器”或“af操作驱动单元”。108.对于ois(光学图像稳定器)的运动,可以通过图像传感器单元350使图像传感器810而不是透镜模块400沿垂直于光轴的方向移动。109.图像传感器单元350可以替代性地被称为“图像传感器移动单元”或“图像传感器移位单元”、“传感器移动单元“或“传感器移位单元“。替代性地,图像传感器单元350可以替代性地被称为“第二致动器”或“ois驱动单元”。110.参照图4,af操作单元100可以包括线圈架110、第一线圈120、磁体130和壳体140。111.af操作单元100还可以包括上弹性构件150和下弹性构件160。112.af操作单元100可以包括第一位置传感器170、电路板190和用于af反馈操作的感测磁体180。af操作单元100还可以包括平衡磁体185和电容器195中的至少一者。113.线圈架110可以设置在壳体140中以便能够通过第一线圈120与磁体130之间的电磁相互作用而沿光轴方向oa或第一方向(例如z轴方向)移动。114.线圈架110可以具有孔,透镜模块400联接或安装至该孔。例如,线圈架110中的孔可以是沿光轴方向穿过线圈架110形成的通孔,并且可以具有圆形形状、椭圆形形状或多边形形状,但不限于此。115.透镜模块400可以包括至少一个透镜和/或透镜镜筒。116.例如,透镜模块400可以包括至少一个透镜和接纳至少一个透镜的透镜镜筒。然而,透镜模块的构型不限于透镜镜筒,并且透镜模块可以具有任何构型,只要该构型能够支承至少一个透镜即可。117.例如,透镜模块400可以与线圈架110螺纹接合。替代性地,可以使用例如粘合剂(未示出)将透镜模块400联接至线圈架110。已经穿过透镜模块400的光可以通过滤光器610辐射至图像传感器810。118.线圈架110可以包括设置在其外表面上的突起111。119.例如,尽管突起111可以在平行于与光轴oa垂直的线的方向上突出,但本公开内容不限于此。120.线圈架110的突起111可以对应于壳体140中的凹槽25a,并且可以设置在壳体140中的凹槽25a中,以便使线圈架110绕光轴的旋转最小化或防止线圈架110绕光轴的旋转超出预定范围。121.此外,突起111可以用作止挡件,该止挡件构造成响应于外部冲击等使线圈架110沿光轴方向(例如,沿从上弹性构件150朝向下弹性构件160的方向)在预定范围内移动。122.线圈架110可以具有形成在其上表面中以用于避免与上弹性构件150的第一框架连接器153发生空间干涉的第一避让凹槽112a。线圈架110可以具有形成在其下表面中以用于避免与下弹性构件160的第二框架连接器163发生空间干涉的第二避让凹槽112b。123.线圈架110可以包括第一联接器116a,第一联接器116a构造成联接并固定至上弹性构件150。例如,尽管线圈架110的第一联接器116a可以具有平坦的形状,但本公开内容不限于此。在另一实施方式中,线圈架110的第一联接器116a可以具有突出部或凹槽的形状。124.线圈架110可以包括第二联接器116b,第二联结器116b构造成联接并固定至下弹性构件160。例如,尽管第二联接器116b可以具有平坦的形状,但本公开内容不限于此。在另一实施方式中,第二联接器116b可以具有突出或凹槽的形状。125.参照图5,线圈架110的外表面可以具有形成在其中的凹槽,第一线圈120坐置、配装或设置在该凹槽中。线圈架110中的凹槽可以具有与第一线圈120的形状对应的形状,即,闭合曲线形状(例如,环形形状)。126.线圈架110可以在其中设置有第一坐置凹槽,感测磁体180坐置、配装、固定或设置在该第一坐置凹槽中。此外,线圈架110可以在其外表面中设置有第二坐置凹槽,平衡磁体185坐置、配装、固定或设置在该第二座凹槽中。例如,线圈架110中的第一坐置凹槽和第二坐置凹槽可以形成在线圈架110的彼此相反的外表面中。127.第一线圈120可以设置在线圈架110处、或者可以联接至线圈架110。例如,第一线圈120可以设置在线圈架110的外表面上。128.第一线圈120可以沿卷绕方向绕光轴oa环绕线圈架110的外表面,但不限于此。129.尽管第一线圈120可以直接地绕线圈架110的外表面卷绕,但本公开内容不限于此。在另一实施方式中,第一线圈120可以实施为绕线圈架110卷绕的线圈环、或者实施为具有成角度的形状的线圈块。130.可以向线圈120供应电力或驱动信号。131.供应给第一线圈120的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量的信号,并且可以是电压型或电流型。132.当向第一线圈120供应驱动信号(例如,驱动电流)时,可以产生通过与第一磁体的电磁相互作用而产生的电磁力,从而凭借所产生的电磁力使线圈架110沿光轴oa的方向移动。133.在af操作单元的初始位置处,线圈架110可以向上或向下移动,这称为af操作单元的双向驱动。替代性地,在af操作单元的初始位置处,线圈架110可以向上(或向前)移动,这称为单向驱动。134.在af操作单元的初始位置处,第一线圈120可以设置成在平行于与光轴oa垂直并延伸穿过光轴的线的方向上与设置在壳体140处的磁体130对应。135.例如,af操作单元可以包括线圈架110和与线圈架110联接的部件(例如,第一线圈120、感测磁体180和平衡磁体185)。af操作单元还可以包括透镜模块400。136.af操作单元的初始位置可以是在没有电力施加至第一线圈120的状态下af操作单元的初始位置,或者是由于上弹性构件150和下弹性构件160仅因af操作单元的重量弹性地变形而导致af操作单元所处的位置。137.另外,线圈架110的初始位置可以是当重力沿从线圈架110至基座210的方向作用时或当重力沿从基座210至线圈架110方向作用时af操作单元所处的位置。138.感测磁体180可以提供由第一位置传感器170检测的磁场,并且平衡磁体185可以用于抵消感测磁体180的磁场的影响并相对于感测磁体180建立重量平衡。139.感测磁体180可以替代性地被称为“传感器磁体”。140.感测磁体180可以设置在线圈架110处或者可以联接至线圈架110。141.感测磁体180可以设置成面向第一位置传感器170。142.平衡磁体185可以设置在线圈架110处,或可以联接至线圈架110。例如,平衡磁体185可以设置成与感测磁体180对置。143.尽管感测磁体180和平衡磁体185中的每一者可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,感测磁体180和平衡磁体185中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。144.感测磁体180可以与线圈架110一起沿光轴方向移动,并且第一位置传感器170可以检测沿光轴方向移动的感测磁体180的磁场的强度或磁力,并且可以输出与检测结果对应的输出信号。145.例如,根据线圈架110在光轴方向上的位移,由第一位置传感器170检测到的磁场的强度或磁力可以变化。因此,第一位置传感器170可以输出与检测到的磁场的强度成比例的输出信号,并且可以使用来自第一位置传感器70的输出信号来检测线圈架110在光轴方向上的位移。146.壳体140在其中容纳线圈架110,并支承磁体130、第一位置传感器170和电路板190。147.参照图4、图6和图7,壳体140可以构造成整体上具有中空的柱体。例如,壳体140可以具有多边形(例如,矩形或八边形)或圆形的孔,并且壳体140中的开孔可以是沿光轴方向穿过壳体140形成的通孔。148.壳体140可以包括侧部部分和拐角,侧部部分对应于或面向盖构件300的侧板302,该拐角对应于或面向盖构件300的拐角。149.为了防止与盖构件300的上板301的内表面直接碰撞,壳体140可以包括设置在其上部分、上表面或上端部处的止挡部145。150.为了防止壳体140的下表面与图像传感器350的电路板800碰撞,壳体140还可以包括从其下表面突出的止挡部。此处,止挡部145可以替代性地被称为“凸台”或“突出部”。151.参照图4,壳体140可以具有构造成在其中容纳电路板190的安装凹槽(或坐置凹槽)14a。安装凹槽14a可以具有与电路板190的形状对应的形状。152.参照图6,壳体140可以具有开口141,电路板190的端子构件95的端子b1至b6通过开口141暴露出。开口141可以形成在壳体140的侧部部分中。153.壳体140的上部分、上端部或上表面可以设置有至少一个第一联接器,所述至少一个第一联接器将连接至上弹性构件150的第一外框架152。154.壳体140的下部分、下端部或下表面可以设置有第二联接器,该第二联接器将联接并固定至下弹性构件160的第二外框架162。例如,壳体140的第一联接器和第二联结器中的每一者可以具有突出部、凹槽或平坦表面的形状。155.磁体130可以设置在壳体140处。例如,磁体130可以设置在壳体140的侧部部分处。磁体130可以是用于af操作的af操作磁体。156.例如,尽管磁体130可以包括设置在彼此相对定位的两个侧部部分处的第一磁体130-1和第二磁体130-2,但本公开内容不限于此。在另一实施方式中,磁体130可以设置在壳体140的拐角处。157.磁体130可以包括两个或更多个磁体。158.在af操作单元的初始位置处,第一磁体130可以在壳体处设置成在平行于与光轴oa垂直并延伸穿过光轴oa的线的方向上与第一线圈120部分地重叠。159.尽管第一磁体130-1和第二磁体130-2中的每一者可以是单极磁化磁体,但本公开内容不限于此。在另一实施方式中,第一磁体130-1和第二磁体130-2中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。160.电路板190可以设置在壳体140处,并且第一位置传感器170可以设置在电路板190处或安装至电路板190。例如,电路板190可以设置在壳体140中的安装凹槽14a中,并且电路板140的端子可以通过壳体140中的开口141暴露于壳体140的外部。161.电路板190可以包括端子构件(或端子单元)95,端子构件95包括多个端子b1至b6,所述多个端子b1至b6将与外部端子或外部设备导电地连接,并且所述多个端子b1至b6可以与第一位置传感器170导电地连接。162.第一位置传感器170可以设置在电路板190的第一表面上,并且多个端子b1至b6可以设置在电路板190第二表面上。此处,电路板190的第二表面可以是与电路板190的第一表面相反的表面。例如,电路板190的第一表面可以是电路板190的面向线圈架110或感测磁体180的表面。163.例如,电路板190可以实施为印刷电路板或柔性印刷电路板(fpcb)。164.电路板190可以包括用于将第一端子b1至第六端子b6导电地连接至第一位置传感器170的电路图案或布线(未示出)。165.第一位置传感器170可以对安装在线圈架110上的感测磁体180在线圈架110运动期间的磁场或磁场的强度进行检测,并且可以输出与检测结果对应的输出信号。166.第一位置传感器170可以仅实施为单个霍尔传感器。第一位置传感器170可以包括两个输入端子和两个输出端子,驱动信号或电力供应至两个输入端子,感测电压(或输出电压)通过两个输出端子输出。167.例如,驱动信号可以通过电路板190的第一端子b1和第二端子b2供应给第一位置传感器170,并且第一位置传感器170的输出可以通过第三端子b3和第四端子b4输出至外部。168.电路板190的第五端子b5和第六端子b6可以导电地连接至上弹性构件150和下弹性构件160中的至少一者,以便向第一线圈120供应驱动信号。169.例如,电路板190的第五端子b5和第六端子b6可以导电地连接至上弹性构件150的第一弹性构件150-1和第二弹性构件150-2,以便通过第一弹性构件150-1和第二弹性构件150-2向第一线圈120供应驱动信号。170.在另一实施方式中,第一位置传感器170可以实施为包括霍尔传感器的驱动器ic。例如,第一位置传感器170可以包括霍尔传感器和驱动器。此处,第一位置传感器170可以包括:第一端子至第四端子,借助于第一端子至第四端子,通过使用协议比方说例如i2c通信的数据通信将数据传输至外部以及从外部接收数据;以及第五端子和第六端子,借助于第五端子和第六端子,将驱动信号直接供应至第一线圈120。第一位置传感器170的第一端子至第四端子可以导电地连接至电路板190的第一端子至第四端子b1至b4。171.第一位置传感器170的第五端子和第六端子可以通过上弹性构件150和下弹性构件160中的至少一者导电地连接至第一线圈120,以便向第一线圈120供应驱动信号。例如,第一位置传感器170的第五端子和第六端子可以导电地连接至第一弹性构件150-1和第二弹性构件150-2,以便向第一线圈120供应驱动信号。电容器195可以设置或安装在电路板190的第一表面上。172.电容器195可以构造成具有芯片形状。此处,芯片可以包括与电容器195的一个端部对应的第一端子以及与电容器195的另一个端部对应的第二端子。电容器195可以替代性地被称为“电容元件”或“蓄电器(condenser)”。173.电容器195可以与电路板190的第一端子b1和第二端子b2导电地并联连接,通过第一端子b1和第二端子b2从外部向位置传感器170供应电力(或驱动信号)。替代性地,电容器195可以与第一位置传感器170的端子导电地并联连接,第一位置传感器170导电地连接至电路板190的第一端子b1和第二端子b2。174.由于电容器195与电路板190的第一端子b1和第二端子b2导电地并联连接,因此电容器195能够用作平滑电路,以消除从外部供应给第一位置传感器170的电力信号gnd和vdd中包括的纹波分量,并且因此能够向第一位置传感器170供应稳定且一致的电力信号。175.上弹性构件150可以联接至线圈架110的上部部分、上端部或上表面以及壳体140的上部部分、上端部或上表面,并且下弹性构件160可以联接至线圈架110的下部部分、下端部或下表面或者壳体140的上部部分、上端部和上表面。176.上弹性构件150和下弹性构件160可以相对于壳体140弹性地支承线圈架110。177.例如,上弹性构件150可以包括第一弹性构件150-1和第二弹性构件150-2。尽管下弹性构件160在图4中实施为单个单元或单个结构,但本公开内容不限于此。178.在另一实施方式中,上弹性构件和下弹性构件中的至少一者可以包括多个弹性单元或弹簧,所述多个弹性单元或弹簧彼此在导电方面隔离或间隔开。179.上弹性构件150还可以包括:第一内框架151,第一内框架151联接或固定至线圈架110的上部部分、上表面或上端部;第二内框架152,第二内框架152联接或固定至壳体140的上部部分、上表面或上端部;以及第一框架连接器153,第一框架连接器153将第一内框架151连接至第一外框架152。180.下弹性构件160可以包括:第二内框架161,第二内框架161联接或固定至线圈架110的下部部分、下表面或下端部;第二外框架162-1至162-3,第二外框架162-1至162-3联接或固定至壳体140的下部部分、下表面或下端部;以及第二框架连接器163,第二框架连接器163将第二内框架161连接至第二外框架162-1至162-3。181.第一框架连接器153和第二框架连接器163中的每一者可以弯折或弯曲(或者可以形成为曲线)至少一次,以便限定预定的图案。182.上弹性构件150和下弹性构件160中的每一者可以由导电材料制成。183.参照图4和图5,电路板190可以包括两个焊盘5a和5b。例如,尽管第一焊盘5a可以设置在电路板190的第二表面上,并且第二焊盘5b可以设置在电路板190的第一表面上,但本公开内容不限于此。在另一实施方式中,第一焊盘和第二焊盘两者可以仅形成在电路板190的第一表面和第二表面中的一者上。184.第一焊盘5a和第二焊盘5b可以导电地连接至电路板190的第五端子b5和第六端子b6。例如,第一焊盘5a可以联接至第一弹性构件150-1,并且第二焊盘5b可以联接至第二弹性构件150-2。185.例如,第一弹性构件150-1的第一外框架可以包括第一联接器4a,第一联接器4a构造成联接至第一焊盘5a,并且第二弹性构件150-2的第一外框架可以包括第二联接器4b,第二联结器4b构造成联接至第二焊盘5b。186.例如,第一线圈120的一个端部可以联接至第一弹性构件150-1,并且第一线圈120的另一个端部可以联接至第二弹性构件150-2。187.在另一实施方式中,上弹性构件可以联接至电路板190的第一焊盘,以便与其导电地连接,并且下弹性构件可以联接至电路板190的第二焊盘,以便与其导电地连接。在另一实施方式中,下弹性构件可以包括两个下弹性构件,并且所述两个下弹性构件中的每个下弹性构件可以联接或导电地连接至电路板190的第一焊盘和第二焊盘中的对应的一者。第一线圈120可以导电地连接至这两个下弹性构件。188.图8是图像传感器单元350的立体图。图9是图像传感器单元350的分解立体图。图10是图9中所示的第二电路板800和壳体450的立体图。图11是图9中所示的第二电路板800、壳体450和磁体23的立体图。图12a是保持器270、第二线圈230、第一电路板250、第二位置传感器240、图像传感器810、支承构件220和连接弹性构件280的分解立体图。图12b是图12a中所示的保持器270、第二线圈230、第一电路板250、第二位置传感器240、滤光器保持器600和滤光器610的立体图。图13a是图12a中所示的保持器270的底部立体图。图13b是保持器270和第一电路板250的底视图。图14是保持器270、图像传感器810、第一电路板250、支承构件220和连接弹性构件280的分解立体图。图15是保持器270、第一电路板250和连接弹性构件280的底视图。图16是保持器270、第一电路板250、连接弹性构件280和绝缘构件285的底视图。图17是连接弹性构件280的局部放大图。图18是一个连接弹簧281和一个支承构件220的底视图。图19a是图1中所示的相机模块的沿着线a-b截取的横截面图。图19b是图1中所示的相机模块10的沿着线c-d截取的横截面图。图20是图1中所示的相机模块10的沿着线i-j截取的横截面图。图21是图8中所示的图像传感器单元350的沿着线e-f截取的横截面图。189.参照图8至图21,图像传感器单元350可以包括固定部分和可移动部分,固定部分包括磁体23,可移动部分包括与固定部分间隔开的第一电路板250、设置在第一电路板250上的第二位置传感器240、设置成面向磁体23的第二线圈230、以及设置在第一电路板250与第二线圈230之间的间隔件。190.间隔件可以是例如保持器270。保持器270也可以与间隔件互换地使用。间隔件可以包括一个或更多个孔41a至41c。191.第二位置传感器240的至少一部分可以设置在间隔件中的孔41a至41c中并且可以在光轴方向上与磁体23重叠。192.间隔件中的孔41a至41c可以在光轴方向上与第二线圈230的至少一部分重叠。193.第二位置传感器240可以在光轴方向上不与第二线圈230重叠。194.第二线圈230可以具有形成在其中心中的孔11a,并且间隔件中的孔41a至41c中的每个孔可以在光轴方向上与第二线圈230中的孔11a重叠。195.第二位置传感器240可以在光轴方向上与第二线圈230中的孔11a和间隔件中的孔41a至41c中的每个孔重叠。196.可以在磁体130与第二位置传感器240之间限定有空间。例如,第二线圈230的至少一部分和/或间隔件的至少一部分可以不置于或设置在磁体130与第二位置传感器240之间的空间中。197.图像传感器单元250可以包括弹性支承构件220和280,弹性支承构件220和280联接至固定部分和可移动部分两者。弹性支承构件220和280可以相对于固定部分柔性地支承可移动部分。弹性支承构件220和280可以替代性地被称为“支承构件”或“弹性构件”。198.固定部分可以包括与第一电路板250间隔开的第二电路板800,并且弹性支承构件220和280可以将第一电路板800导电地连接至第二电路板800。199.第二线圈230可以联接至间隔件,并且可以导电地连接至第一电路板250。200.根据本发明的实施方式的相机模块可以包括透镜模块(或透镜)400、设置在与透镜对应的位置处的图像传感器810、构造成使图像传感器810移动的驱动单元、与透镜间隔开的第一电路板250、设置在第一电路板250上的第二位置传感器240、以及设置在第一电路板250上的间隔件。例如,驱动单元可以包括磁体23和设置成面向磁体23的第二线圈230,并且间隔件可以设置在第一电路板250与第二线圈230之间以便将第二线圈230与第二位置传感器240间隔开。图像传感器810可以沿垂直于光轴方向的方向移动。201.替代性地,根据本发明的实施方式的图像传感器单元可以包括具有磁体23的固定部分、具有与固定部分间隔开的第一电路板250的可移动部分、设置在第一电路板230上的保持器270、设置在保持器270上以便面向磁体23的第二线圈230、以及设置在第一电路板250上以便面向磁体23的第二位置传感器240、以及联接至固定部分和可移动部分两者的弹性支承构件220和280。202.可移动部分可以通过磁体23与第二线圈230之间的相互作用沿垂直于光轴的方向移动,并且第二线圈240可以在垂直于光轴方向的方向上不与第二位置传感器240重叠。203.弹性支承构件220和280可以在其一个端部处联接至第二电路板800,并且在其另一个端部处联接至第一电路板250。换句话说,弹性支承构件220和280可以将第一电路板800连接至第二电路板800。204.第二线圈230可以具有形成在其中心中的孔11a,并且第二位置传感器240可以设置在第二线圈230中的孔11a下方,以便在光轴方向上与孔11a重叠。205.保持器270可以在其中具有对应于第二位置传感器240的通孔,并且第二位置传感器240可以设置在保持器270中的通孔中。例如,第二位置传感器240可以在垂直于光轴的方向上与保持器270重叠。206.第一电路板260的四个拐角可以设置有从第一电路板的侧向侧表面突出的突起52a至52d,并且保持器270的下表面可以在其中形成有坐置凹槽51a至51d,第一电路板250的突起51a至52d设置在坐置凹槽51a至51d中。207.第二线圈230可以包括设置在保持器270的第一拐角至第四拐角处的第一线圈单元230-1至第四线圈单元230-4,并且磁体23可以包括与第一线圈单元230-1对应的第一磁体23a、与第二线圈单元230-2对应的第二磁体23b、与第三线圈单元230-3对应的第三磁体23c、以及与第四线圈单元230-4对应的第四磁体23d。208.第二位置传感器240可以包括设置在第一线圈单元230-1下方的第一传感器240a、设置在第二线圈单元230-2下方的第二传感器240b以及设置在第三线圈单元230-3下方的第三传感器240c。209.例如,第一线圈单元230-1至第四线圈单元230-4中的每一者可以独立地被激活。换句话说,第一线圈单元230-1至第四线圈单元230-4可以由各自的驱动信号激活。210.在另一实施方式中,第一线圈单元230-1至第三线圈单元230-4可以独立地被激活,并且第四线圈单元230-4可以与第一线圈单元230-1至第三线圈单元230-3中的一者一起被激活。例如,第一线圈单元230-1至第三线圈单元230-3可以由不同的驱动信号激活,并且第四线圈单元230-4可以与第一线圈单元230-1至第三线圈单元230-3中的一者一起由同一驱动信号激活。211.例如,图像传感器单元350可以包括第二电路板800、磁体23、保持器270、第一电路板250、第二线圈230、第二位置传感器240和图像传感器810。图像传感器单元350还可以包括连接弹性构件280和支承构件220。212.图像传感器单元350还可以包括壳体450,壳体450构造成接纳第二电路板800的至少一部分。213.第二电路板800可以用于将信号从外部供应至图像传感器单元350或者将信号从图像传感器单元320供应至外部。214.第二电路板800可以替代性地被称为固定电路板、辅助电路板、固定板等。215.参照图9和图10,第二电路板800可以包括:第一区域801,第一区域801与af操作单元100对应;第二区域802,连接器840设置在第二区域802处;以及第三区域803,第三区域803将第一区域801连接至第二区域802。连接器840可以导电地连接至第二电路板800的第二区域802,并且可以包括构造成导电地连接至外部设备的端口。216.尽管第二电路板800的第一区域801和第二区域802中的每一者可以包括柔性基底和刚性基底,并且第三区域803可以包括柔性基底,但本公开内容不限于此。在另一实施方式中,电路板800的第一区域801至第三区域803中的至少一者可以包括刚性基底和柔性基底中的至少一者。217.第一区域801可以替代性地被称为第一基底,第二区域802可以替代性地被称为第二基底,并且第三区域803可以替代性地被称为第三基底。218.第二电路板800可以具有与线圈架110中的孔、透镜模块400和/或图像传感器810对应的孔800a。例如,第二电路板800中的孔800a可以形成在第一区域801中。219.参照图10、图11和图19a。透镜模块400的至少一部分可以延伸穿过第二电路板800中的孔800a,并且可以定位在第二电路板800的第二表面44b下方。220.透镜模块400可以设置在第一电路板250上。例如,透镜模块400可以定位在设置在滤光器保持器600处的滤光器610上。221.例如,透镜模块400的透镜或透镜镜筒的下部部分、下端部或下表面可以延伸穿过第二电路板800中的孔800a,并且可以定位在第二电路板800的第二表面44b下方。222.例如,透镜模块400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在第一电路板250的第一表面60a上方。223.此外,透镜模块400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在保持器260中的孔70上方。224.尽管第二电路板800可以构造成当从上方观察时具有多边形形状(例如,四边形形状、矩形形状或正方形形状),但本公开内容不限于此。在另一实施方式中,第二电路板800可以构造成具有另一形状,比如圆形形状。此外,尽管第二电路板800中的孔800a可以构造成具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,孔800a可以构造成具有另一形状,比如圆形形状。225.第二电路板800可以包括与支承构件220对应的至少一个焊盘。例如,第二电路板800的至少一焊盘可以包括多个焊盘800b。此处,焊盘800b可以替代性地被称为“引线图案”、“引线构件”或“孔”。226.第二电路板800可以具有与支承构件220对应的至少一个孔,并且所述孔可以穿过第二电路板800形成。例如,第二电路面板800可以包括与多个支承构件对应的多个通孔。227.例如,多个焊盘800b中的每一个焊盘可以具有沿光轴方向穿过第二电路板800形成的孔。228.多个焊盘800b中的每个焊盘可以形成为环绕电路板800中的孔,并且还可以包括引线图案或导电层。229.支承构件220可以在延伸穿过电路板800中的孔的状态下焊接至焊盘800b,并且可以导电地连接至设置在焊盘800a周围的引线图案。230.例如,多个焊盘800b可以以预定的间隔彼此间隔开,以便环绕第二电路板800中的孔800a。例如,多个焊盘800b可以设置在第二电路板800中的孔800a与第二电路板800的侧部之间。231.第二电路板800可以具有至少一个联接孔800c,联接孔800c构造成联接至壳体450的联接突出部45b。尽管联接孔800c可以是穿过第二电路板800形成的通孔,但本公开内容不限于此。在另一实施方式中,联接孔800c可以是凹槽。232.例如,尽管联接孔800c可以实施为多个联接孔,所述多个联接孔形成在第二电路板800的拐角中,这些拐角在对角线方向上是彼此相对的,但本公开内容不限于此。联接孔可以定位在电路板800的侧部附近或电路板800的侧部与孔800a之间。233.第二电路板800可以包括至少一个端子,例如,多个端子7a至7f。234.多个端子7a至7f可以形成在第二电路板800的第一表面(例如,上表面)44a上。例如,多个端子7a至7f可以设置在第二电路板800的与第二电路板800的一个拐角相邻的一个侧部处。235.多个端子7a至7f中的每个端子可以经由导电粘合构件或焊料导电地连接至电路板190的端子b1至b6中的对应一者。236.例如,第二电路板800可以包括端子构件80a,多个端子7a至7f在端子构件80a处形成。尽管端子构件80a从第二电路板800的一个侧部沿垂直于光轴的方向突出,但本公开内容不限于此。在另一实施方式中,端子构件80a可以不从电路板800的一个侧部突出。237.图像传感器单元350还可以包括壳体450,第二电路板800设置、坐置或接纳在壳体450中。238.壳体450可以联接至第二电路板800的至少一部分。壳体450可以在其中接纳磁体23,并且可以替代性地被称为“磁体保持器”。239.例如,第二电路板800可以设置在af操作单元100下方,并且可以联接至af操作单元100。例如,粘合构件310可以设置在第二电路板800与af操作单元100之间,以便将第二电路板800和af操作单元100彼此连接。240.例如,粘合构件310可以设置在第二电路板800的第一表面44a与af操作单元100的壳体140的下部部分、下表面或下端部之间,以便将其彼此联接。241.在另一实施方式中,af操作单元100的壳体140还可以联接至图像传感器单元350的壳体450。例如,图像传感器单元的上部部分、上端部或上表面也可以经由粘合构件或联接结构联接至af操作单元100的壳体140的下部部分、下端部或下表面。242.壳体450可以设置在第二电路板800下方。例如,af操作单元100可以设置在第一电路板800上方,并且壳体450可以设置在第二电路板800下方。243.壳体450可以具有与第二电路板800的第一区域801对应或一致的形状。尽管壳体450可以构造成当从上方观察时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,壳体450可以构造成具有圆形形状或椭圆形形状。244.壳体450可以具有形成在其中的孔450a。壳体450中的孔450a的至少一部分可以与第二电路板800中的孔800a对应或重叠。245.尽管壳体450中的孔450a可以构造成当从上方观察时具有多边形形状(例如,四边形形状或八边形形状)、圆形形状或十字形形状,但本公开内容不限于此。壳体450中的孔450a可以是沿光轴方向穿过壳体450形成的通孔。246.壳体450可以包括从其本体42的上表面突出的至少一个联接突出45b。例如,联接突出部45b可以从壳体450的上表面沿从壳体450的上表面朝向第二电路板800的第二表面(例如,下表面)44b的方向突出。247.壳体450可以包括与多个焊盘800b对应的避让区域41。避让区域41可以形成在与支承构件220对应的位置处,以避免壳体450与支承构件220之间发生空间干涉。248.参照图1至图10,第二电路板800可以包括与af操作单元100的电路板190的端子b1至b6对应的端子7a至7f。249.第二电路板800的端子7a至7f中的每个端子可以导电地连接至af操作单元100的电路板190的端子b1至b6中的对应的一个端子。驱动信号或电力可以通过第二电路板800供应至第一位置传感器170,并且第一位置传感器170的输出可以输出至第二电路板800。此外,驱动信号或电力可以通过第二电路板800供应至第一线圈120。250.参照图11,第二电路板800可以包括设置在第二区域802中的连接器840。例如,连接器840可以设置在第二电路板800的第二区域802的一个表面(例如,下表面或上表面)上。251.壳体450可以包括坐置部分8a,磁体23接纳、设置或坐置在坐置部分8a中。坐置部分8a可以形成在壳体450的下表面中。252.例如,坐置部分8a可以是从壳体450的下表面凹陷的凹槽,并且可以具有与磁体23的形状对应的形状。253.例如,尽管坐置部分8a可以形成在壳体450的拐角中,但本公开内容不限于此。在另一实施方式中,坐置部分8a可以形成在壳体450的侧部中。254.例如,尽管壳体450可以包括分别形成在其四个拐角中的四个坐置部分8a,但本公开内容不限于此。在另一实施方式中,壳体450可以包括与磁体23的数目对应的多个坐置部分。255.磁体23可以经由粘合构件附接或联接至壳体450的坐置部分8a。此处,导引凹槽9a可以形成在壳体450的坐置部分8a中以便导引粘合构件。导引凹槽9a可以用于将粘合构件均匀地分散在坐置部分8a中。256.磁体23可以设置在壳体450处。例如,尽管磁体23可以设置在壳体140的拐角处,但本公开内容不限于此。在另一实施方式中,磁体23可以设置在壳体450的侧部部分处。257.磁体23可以用于提供磁场,该磁场与第二线圈230相互作用以出于手抖动校正的目的执行ois(光学稳像)。258.例如,磁体23可以包括多个磁体23a至23d。磁体23a至23d中的每个磁体可以设置在壳体450的拐角中的对应的一个拐角处。259.尽管磁体23a至23d中的每个磁体可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,磁体23a至23d中的每个磁体可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。260.当磁体23a至23d中的每一个磁体是双极磁化磁体时,磁体23a至23d中的每个磁体可以包括第一磁体部分、第二磁体部分和设置在第一磁体部分与第二磁体部分之间的分隔壁。此处,分隔壁也可以替代性地被称为“非磁性分隔壁”。261.例如,第一磁体部分和第二磁体部分中的每一者可以包括n极、s极以及位于n极与s极之间的接合部分。接合部分可以是基本上没有磁性并且具有几乎没有极性的区域的部分,并且可以是自然形成以便形成包括一个n极和一个s极的磁体的部分。262.分隔壁可以将第一磁体部分与第二磁体部分彼此分离或隔离,并且可以是基本上没有磁性或极性的部分。例如,分隔壁可以是非磁性材料、空气等。非磁性分隔壁可以被视为“中性区”或“中性部分”。263.分隔壁可以是当第一磁体部分和第二磁体部分被磁化时人工形成的部分,并且分隔壁的宽度可以大于接合部分的宽度。264.例如,尽管磁体23a至23d中的每个磁体的分隔壁可以沿平行于第二电路板800或第一电路板250的方向定向,但本公开内容不限于此。在另一实施方式中,分隔壁可以沿垂直于第二电路板800或第一电路板250的方向定向。265.例如,四个磁体23a至23d中的每个磁体可以设置在壳体450的四个拐角中的对应的一个拐角处。例如,尽管设置在壳体450的两个相邻拐角处的两个磁体(例如,23a和23b)可以定向为彼此垂直,并且设置在壳体450的在对角线方向上面向彼此的两个拐角处的两个磁体(例如,23a和23c;23b和23d)可以定向成彼此平行,但本公开内容不限于此。266.例如,磁体23a至23d的内部可以具有相同的极性。此外,磁体23a至23d的外部可以具有相同的极性。267.例如,磁体23a至23d中的每个磁体的内部可以被磁化为n极,并且磁体23a至23d中的每个磁体的外部可以被磁化为s极。在变型中,磁体23a至23d中的每个磁体的内部可以被磁化为s极,并且磁体22a至22d中的每个磁体的外部可以被磁化为n极。268.保持器270可以设置在第二电路板800下方。保持器270可以与第二电路板800间隔开,并且可以联接至第一电路板250。269.保持器270可以在其中接纳第二线圈230或者可以对第二线圈230进行支承。保持器270可以用于对第二线圈230进行支承,使得第二线圈230与电路板250间隔开。270.例如,保持器270的下部部分、下表面或下端部可以联接至第一电路板250的上部部分、上表面或上端部。271.参照图13a和图13b,保持器270的下表面42b可以包括第一表面36a和第二表面36b。第二表面36b可以在光轴方向上相对于第一表面36a具有高度差。例如,第二表面36b可以定位在第一表面36a上方。例如,第二表面36b可以定位成比第一表面36a更靠近保持器270的上表面42a。例如,保持器270的上表面42a与第二表面36b之间的距离可以小于保持器270的上表面42a与第一表面36a之间的距离。272.保持器270可以包括将第一表面36a连接至第二表面36b的第三表面36c。例如,尽管第一表面36a和第二表面36b可以彼此平行,并且第三表面36c可以垂直于第一表面36a和/或第二表面36b,但本公开内容不限于此。在另一实施方式中,在第三表面36c与第一表面36a(或第二表面36b)之间限定的夹角可以是锐角或钝角。273.第一表面36a可以定位在保持器270的下表面42b的周缘处,并且第二表面36b可以定位在保持器270的中心区域中。274.保持器70可以在其中具有与电路板250的上表面的区域对应的孔70。275.尽管保持器270中的孔70可以当从上方观察时具有多边形形状,例如,四边形形状、圆形形状或椭圆形形状,但本公开内容不限于此。孔70可以具有各种形状中的任何形状。276.例如,保持器270中的孔70可以构造成具有使得将图像传感器810和设置在第一电路板250上的一些元件暴露出来的形状或尺寸。例如,保持器270中的孔70的表面积可以小于第一电路板250的第一表面60a的表面积。277.例如,孔70可以穿过保持器270的下表面42b的第二表面36b形成。278.保持器270可以在其中具有与第二位置传感器240对应的孔41a、41b和41c。例如,保持器270可以在其中具有在与第一传感器至第三传感器240a、240b和240c分别对应的位置处形成的孔41a、41b和41c。279.例如,孔41a、41b和41c可以定位成与保持器270的拐角相邻。保持器270还可以具有形成为与保持器270的拐角相邻的虚设孔41d,虚设孔41d不与第二位置传感器240中的任何第二位置传感器对应。虚设孔40d可以用于在ois操作期间实现ois可移动单元的重量平衡。在另一实施方式中,可以不形成虚设孔41d。280.孔41a、41b和41c可以沿光轴方向穿过保持器270形成。例如,尽管孔41a、41b和41c可以形成在保持器270的下表面42b的第二表面36b中,但本公开内容不限于此。在另一实施方式中,可以省去保持器270中的孔41a、41b和41c。281.注射孔33a可以形成在保持器270的下表面42b中,以与模具中的注射孔对应,该模具构造成注射用于形成保持器270的材料。282.第一电路板250可以设置在保持器270的下表面42b的第二表面36b上。第一电路板250可以替代性地被称为“传感器板”、“主板”、“主电路板”、“传感器电路板”或“可移动电路板”。283.在所有实施方式中,第一电路板250可以替代性地被称为“第二板”或“第二电路板”,并且第二电路板800可以替代性地被称为“第一板”或“第一电路板”。284.第一电路板250的第一表面60a可以经由粘合构件联接或附接至保持器270的下表面42b的第二表面36b。285.此处,电路板250的第一表面60a可以是面向第二电路板800或af操作单元100并且其上布置有图像传感器810的表面。电路板250的第二表面60b可以是与电路板250的第一表面60a相反的表面。286.保持器270的下表面42b可以在其中设置有坐置凹槽51a至51d,电路板250的至少一部分配装和设置在坐置凹槽51a至51d中。287.坐置凹槽51a至51d可以分别形成在保持器270的下表面42b的四个拐角中,以便与第一电路板250的突起52a至52d对应。288.例如,保持器270的下表面42b的第一表面36a可以环绕电路板250的突起52a至52d,并且第一电路板250的侧向侧表面52a至52d可以面向保持器270的第三表面36c。粘合构件可以设置在第一电路板250的突起52a至52d与保持器270中的坐置凹槽51a至51d之间,以便将突起联接至坐置凹槽。289.第一电路板250的突起52a至52d可以用于增加保持器2170与第一电路板250之间的联接力并防止电路板250旋转并且因此未对准。290.第一电路板250的突起52a至52d可以在光轴方向上与保持器270中的坐置部分51a重叠。此外,孔41a、41b和41c可以在光轴方向上与保持器270中的坐置凹槽51a的至少一部分重叠。此外,孔41a、41b和41c可以与第一电路板250上的突起52a至52d的至少一部分重叠。291.至少一个凹槽272可以形成在保持器270的下表面42b的第一表面36a中,以便从第一表面36a凹陷。例如,保持器270可以具有与下表面42b的多个侧部(例如,四个侧部)对应的多个凹槽(例如,四个凹槽)。292.凹槽272可以包括:底部72a,底部72a从保持器270的下表面42b的第一表面36a凹陷,以便在光轴方向上在其之间具有高度差;以及侧向侧壁72b,侧向侧壁72b将底部72a连接至第一表面36a。293.例如,凹槽272的底部72a可以定位成比保持器270的下表面42b的第一表面36a更靠近保持器270的上表面42a。此外,凹槽272的底部72a可以定位在保持器270的下表面42b的第一表面36a与第二表面36b之间。294.保持器270可以具有至少一个孔270a,支承构件220延伸穿过孔270a。例如,保持器270可以具有与多个支承构件220对应的多个孔270a。孔270a可以用于避免与支承构件发生空间干涉。在另一实施方式中,保持器270可以具有避让凹槽或避让部分来代替孔,以避免与支承构件发生空间干涉。295.例如,多个孔270a可以设置或布置成环绕保持器270中的孔70并以规则间隔彼此隔开。例如,多个孔270a可以布置在保持器270中的孔70和保持器270的侧部之间的区域中。296.例如,孔270a可以是穿过保持器270形成的通孔。保持器270中的多个孔270a可以在光轴方向上与保持器270中的凹槽272重叠。例如,多个孔270a中的每个孔可以在凹槽270的底部72a处敞开。在凹槽272的底部72a处敞开的多个孔270a的端部可以定位成在光轴方向上相对于保持器270的下表面42b的第一表面36a具有高度差。297.例如,多个孔270a可以穿过保持器270中的凹槽272的底部72a形成。298.保持器270中的凹槽272用于避免当连接弹性构件280在ois操作期间弹性变形时与保持器270发生空间干涉,从而使连接弹性构件280容易地弹性变形。299.保持器270的下表面42b可以设置有突起275。例如,突起275可以形成在保持器270的下表面42b的第一表面36a上。300.保持器270的突起275可以从保持器270的下表面42b的第一表面36a沿朝向基座210的底部的方向突出。301.保持器270的突起275可以沿朝向基座210的底部的方向比连接弹性构件280突出得更远。替代性地,保持器270的突起275可以沿朝向基座210的底部的方向比将连接弹性构件280联接至支承构件220的焊料902突出得更远。302.例如,保持器270的突起275与基座210的底部之间在光轴方向上的第一距离可以小于连接弹性构件280与基座210的底部之间的第二距离。例如,第一距离可以小于焊料902与基座210的底部之间的第三距离。303.突起275可以用作止挡部,该止挡部构造成防止在发生外部冲击的情况下保持器270的下表面42b的第一表面36a、连接弹性构件280和/或焊料902与基座210的底部发生碰撞。304.例如,尽管突起275可以设置在保持器270的下表面4b的拐角处,但本公开内容不限于此。在另一实施方式中,突起275可以设置在保持器270的下表面42b的侧部处,或者设置在保持器270的下表面42b的侧部与孔70之间。305.第一电路板250可以设置在第二电路板800下方。306.例如,第一电路板250可以设置在保持器270下方。307.尽管在图12a中,设置有图像传感器810的第一电路板250包括单个电路板,但本公开内容不限于此。在另一实施方式中,第一电路板250可以包括:第三板,图像传感器810设置在该第三板处;以及第四板,第四板导电地连接至第三板。第四板可以经由支承构件220和连接弹性构件280导电地连接至第二电路板800。308.尽管在从上面看时,第一电路板250、例如第一电路板250的周缘可以具有与保持器270的下表面42b一致或对应的形状,但本公开内容不限于此。309.第一电路板250可以包括从其侧向侧表面21a突出的一个或更多个突起52a至52d。310.例如,突起52a至52d可以分别形成在第一电路板250的四个拐角处。311.参照图13b,第一电路板250可以包括第一突起52a至第四突起52d,第一突起52a至第四突起52d分别形成在第一电路板250的四个拐角处。312.第一突起52a至第四突起52d中的每一者可以从第一电路板250的侧向侧表面21a沿 x轴方向、-x轴方向、 y轴方向和-y轴方向中的至少一个方向突出。313.例如,第一突起52a和第三突起52c中的每一者可以从第一电路板250的侧向侧表面21a沿x轴方向和y轴方向两者突出。第二突起52b和第五突起52d中的每一者可以各自沿在y轴方向突出,并且可以相对于彼此沿相反的方向突出。314.第一电路板250可以包括与支承构件220或连接弹性构件280的连接弹簧281对应的至少一个端子262。315.例如,第一电路板250可以包括多个端子262,这些端子在第一电路板250的第二表面60b上设置或布置成彼此间隔开。例如,端子262可以设置成与第一电路板250的侧向侧表面21a相邻。端子262的数目不限于图14中所示的数目,并且可以多于或少于图14中所示的端子262的数目。316.例如,第一电路板250的端子262可以导电地连接至支承构件220。例如,第一电路板250的端子262可以导电地连接至连接弹簧281。317.第一电路板250可以包括端子e1至e8,端子e1至e8构造成导电地连接至第二线圈230。此处,端子e1至e8可以替代性地被称为“焊盘”或“接合部分”。第一电路板250的端子e1至e8可以设置或布置在第一电路板250的第一表面60a上。318.第一电路板250可以是印刷电路板(pcb)或柔性印刷电路板(fpcb)。319.第一电路板250可以具有坐置区域260a,图像传感器810设置在坐置区域260a中。例如,坐置区域260a可以设置在第一电路板250的第一表面(例如,上表面)60a上。例如,保持器270中的孔70可以使穿过孔70设置在坐置区域260a中的图像传感器810敞开或露出。320.第二线圈230可以设置在保持器270处。321.例如,第二线圈230可以设置在保持器270的上表面42a上。322.第二线圈230可以设置在壳体450下方。第二线圈230可以设置在磁体23下方。323.例如,第二线圈230可以在保持器270的上表面42a上设置成在光轴oa的方向上与设置在壳体450处的磁体23对应、面向或重叠。324.第二线圈230可以联接至保持器270。例如,第二线圈230可以联接至保持器270的上表面42a。保持器270的上表面42a可以设置有至少一个联接突出部,所述至少一个联接突出部构造成联接至第二线圈230。325.联接突出部51可以从保持器270的上表面42a沿朝向第二电路板800的方向突出。例如,联接突出部51可以形成为与保持器270中的孔41a至41d中的每一者相邻。326.例如,两个联接突出部51a和51b可以设置或布置在保持器270处,以便与孔41a至41d中的每一者对应,并且一个孔(例如,41a)可以形成在这两个联接突出部51a与51b之间。327.例如,第二线圈230可以包括多个线圈单元230-1至230-4。例如,尽管第二线圈230可以包括四个线圈单元,但本公开内容不限于此。328.多个线圈单元230-1至230-4中的每个线圈单元可以与在光轴(oa)方向上设置在壳体450处的磁体23a至23d中的对应的一个磁体面向或重叠。329.尽管线圈单元230-1至230-4中的每一者可以构造成呈具有闭合曲线形状或环形形状的线圈块的形式,但本公开内容不限于此。例如,线圈单元230-1至230-4中的每一者可以包括fp(精细图案)线圈。在另一实施方式中,线圈单元230-1至230-4可以形成在除了第一电路板250之外的另外的电路构件处。330.例如,四个线圈单元230-1至230-4中的每个线圈单元可以设置在保持器270的四个拐角中的对应的一个拐角处。331.线圈单元230-1至230-4中的每个线圈单元可以联接至与其对应的保持器270的两个联接突出部51a和51b。例如,线圈单元230-1至230-4中的每一者可以直接绕保持器270的两个对应的联接突出部51a和51b卷绕。332.线圈单元230-1至230-4可以在光轴方向上对应于或面向电路板250的相应的突出部52a至52d。例如,线圈单元230-1至230-4中的每一者的至少一部分可以在光轴方向上与电路板250的突起52a至42d中的对应的一者重叠。333.第二线圈230可以导电地连接至第一电路板250,使得通过第一电路板250向第二线圈230供应电力或驱动信号。334.供应给第二线圈230的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量两者的信号,并且可以是电压型或电流型。335.此处,电流可以被独立地施加至四个线圈单元中的至少三个线圈单元。336.在第一实施方式中,可以通过三个通道控制第二线圈230。337.例如,在第一线圈单元至第四线圈单元中,只有第一线圈单元至第三线圈单元可以彼此在导电方面隔离,并且第四线圈单元可以串联地导电连接至第一线圈单元至第三线圈单元中的一者。此处,可以从第二线圈230引出三对引线,即总共六根引线。338.在第二实施方式中,可以通过四个单独的通道控制第二线圈230。此处,四个线圈单元可以彼此在导电方面隔离。可以选择性地向线圈单元中的每个线圈单元施加正向电流和反向电流中的一者。此处,可以从第二线圈230引出四对引线,即总共八根引线。339.例如,在对角线方向上面向彼此的两个线圈单元230-1和230-3可以沿第一轴向方向(例如,沿y轴方向)延伸或定向,并且在对角线方向上面向彼此的另外两个线圈单元230-2和230-4可以沿第二轴向方向(例如,沿x轴方向)延伸或定向。此处,第一轴向方向可以与第二轴向方向垂直。340.第一线圈单元230-1的长边和第三线圈单元230-3的长边可以设置成彼此平行。第二线圈单元230-2的长边和第四线圈单元230-4的长边可以设置成彼此平行。第一线圈单元230-1的长边和第二线圈单元230-2的长边可以不设置成彼此平行。此处,第一线圈单元230-1的长边和第二线圈单元230-2的长边可以设置成使得从其延伸的假想线彼此相交。例如,第一线圈单元230-1定向所沿的方向和第二线圈单元230-2定向所沿的方向可以彼此垂直。341.在另一实施方式中,四个线圈单元中的至少一个线圈单元可以与其余线圈单元被分开地驱动。在另一实施方式中,四个线圈单元可以被单独地驱动。342.例如,第一线圈单元230-1的一个端部可以连接至第一端子e1,并且第一线圈单元230-1的另一个端部可以连接至第二端子e2。可以向第一端子e1和第二端子e2提供第一驱动信号以激活第一线圈单元230-1。第一端子e1和第二端子e2可以布置成沿与第一线圈单元230-1的长边平行的方向(例如,沿y轴方向)彼此间隔开。343.第二线圈单元230-2的一个端部可以连接至第三端子e3,并且第二线圈单元230-2的另一个端部可以连接至第三端子e4。可以向第三端子e3和第四端子e4提供第二驱动信号以激活第二线圈单元230-2。第三端子e3和第四端子e4可以布置成沿与第二线圈单元230-2的长边平行的方向(例如,沿x轴方向)彼此间隔开。344.第三线圈单元230-3的一个端部可以连接至第五端子e5,并且第三线圈单元230-3的另一个端部可以连接至第六端子e6。可以向第五端子e5和第六端子e6提供第三驱动信号以激活第三线圈单元230-3。第五端子e5和第六端子e6可以布置成沿与第三线圈单元230-3的长边平行的方向(例如,沿y轴方向)彼此间隔开。345.第四线圈单元230-4的一个端部可以连接至第七端子e7,并且第四线圈单元230-4的另一个端部可以连接至第八端子e8。第七端子e7和第八端子e8可以被提供用于激活第四线圈单元230-4的第四驱动信号。第七端子e7和第八端子e8可以布置成沿与第四线圈单元230-4的长边平行的方向(例如,沿x轴方向)彼此间隔开。346.第一端子e1至第八端子e8可以设置在第一电路板250的上表面60a的位于线圈单元230-1至230-4与图像传感器810之间的一个区域中。347.保持器270中的孔70可以使第一电路板250的端子e1至e8暴露。线圈单元230-1至230-4的下表面可以定位成高于第一电路板250的端子e1至e8。348.例如,第一电路板250的端子e1至e8可以定位成低于保持器270的上表面60a。349.在实施方式中,在对角线方向上面向彼此的两个线圈单元(例如,230-3和230-4)可以彼此直接串联连接,并且可以由信号驱动信号激活。同时,在对角线方向上面向彼此的两个线圈单元(例如,230-1和230-2)可以彼此在导电方面隔离,并且可以由不同的驱动信号单独地激活。350.在另一实施方式中,四个线圈单元230-1至230-4可以彼此在导电方面隔离,并且可以由不同的各个驱动信号被单独地激活。351.线圈单元230-1至230-4中的每个线圈单元可以具有形成在其中央的开口或孔,并且两个联接突出部51a和51b可以配装到线圈单元230-1至230-4中的每个线圈单元中的开口11a中(参见图12a)并联接至开口11a。352.例如,线圈单元230-1至230-4中的每个线圈单元的至少一部分可以与设置在壳体450处的磁体23a至23d中的对应的一者重叠。353.包括图像传感器810的ois可移动单元可以通过磁体23a至23d与被施加驱动信号的线圈单元230-1至230-4之间的相互作用而沿第二方向和/或第三方向、例如沿x轴方向和/或沿y轴方向移动,从而执行手抖动校正。稍后将给出对ois可移动单元的描述。354.第二位置传感器240可以设置、联接或安装至第一电路板250的第一表面(例如,上表面)60a。第二位置传感器240可以检测ois可移动单元在垂直于光轴oa的方向上的位移,例如,ois可移动单元沿垂直于光轴的方向的移位或倾斜,或ois可移动单元绕光轴的旋转。355.此处,第一位置传感器170可以替代性地被称为“af位置传感器”,并且第二位置传感器240可以替代性地被称为“ois位置传感器”。356.例如,可以在第一电路板250的突起52a至52c中的每个突起处设置第一位置传感器240。357.第二位置传感器240可以设置在第二线圈230下方。358.第二位置传感器240可以在垂直于光轴的方向上不与第二线圈230重叠。例如,第二位置传感器240的感测元件可以在垂直于光轴的方向上不与第二线圈230重叠。该感测元件可以是构造成检测磁场的元件。359.例如,第二位置传感器240的中心可以在垂直于光轴的方向上不与第二线圈230重叠。例如,第二位置传感器240的中心可以是垂直于光轴的x-y坐标平面上x轴方向和y轴方向上的空间中心。替代性地,第二位置传感器240的中心可以是x轴方向、y轴方向和z轴方向上的空间中心。360.在另一实施方式中,第二位置传感器240的至少一部分可以在垂直于光轴的方向上与第二线圈230重叠。例如,第二位置传感器240的上部区域2a(参见图26)的至少一部分可以在垂直于光轴的方向上与第二线圈230重叠。第二位置传感器240的下部区域2b可以在垂直于光轴的方向上与第二线圈230重叠。上部区域2a可以是第二位置传感器240的长度的中点与第二位置传感器240的上表面之间的区域,并且下部区域2b可以是第二位置传感器240的剩余区域,下部区域2b定位在上部区域2a下方。361.例如,第二位置传感器240可以在光轴方向上与保持器270中的孔41a至41c重叠。例如,第二位置传感器240可以在光轴方向上与第二线圈230中的开口11a或孔重叠。例如,保持器270中的孔41a至41c的至少一部分可以在光轴方向上与第二线圈230中的开口11a或孔重叠。362.第二位置传感器240可以包括一个或更多个传感器240a、240b和240c。例如,第二位置传感器230可以包括三个传感器240a、240b和240c。363.第一传感器至第三传感器240a、240b和240c中的每一者可以实施为仅一个霍尔传感器,或者可以实施为包括霍尔传感器的驱动ic。对第一位置传感器170的描述可以在修改或未修改的情况下应用于第一传感器至第三传感器240a、240b和240c。364.第一传感器至第三传感器240a、240b和240c中的每一者可以导电地连接至第一电路板250的端子262中的预定对应端子。例如,相应的驱动信号可以经由端子262施加至第一传感器至第三传感器240a、240b和240c中的每一者,并且第一传感器至第三传感器中的每一者的输出信号可以输出至端子262中的其他预定端子。365.例如,可以为第一传感器至第三传感器240a、240b和240c中的每一者分配第一电路板250的端子262中的六个或四个不同的端子。366.例如,当第一传感器至第三传感器240a、240b和240c中的每一者是霍尔传感器时,可以为第一传感器至第三传感器240a、240b和240c中的每一者分配四个端子。例如,该四个端子可以是两个输入端子和两个输出端子。367.例如,当第一传感器至第三传感器240a、240b和240c中的每一者是包括霍尔传感器的驱动ic时,可以为第一传感器至第三传感器240a、240b和240c中的每一者分配六个端子。对位置传感器170的描述可以在修改或未修改的情况下应用于第一传感器至第三传感器240a、240b和240c中的每一者与第一电路板250的端子262之间的导电连接、以及驱动信号与位置传感器的输出之间的关系。368.例如,由于通过三个通道控制四个线圈单元230-1至230-4是,因此第一传感器至第三传感器240a、240b和240c中的各者可以设置在三个线圈单元230-1至230-3中的对应的一者中,并且剩余的线圈单元230-4可以不设置有传感器。369.例如,线圈单元230-1至230-4中的每一者可以构造成成其中具有开口11a(参见图12a)、孔或腔的环的形式。例如,第一传感器至第三传感器240a、240b和240c中的每一者可以设置在线圈单元230-1至230-3中的对应一者的开口11a、孔或腔下方。370.例如,第一传感器至第三传感器240a、240b和240c中的每一者可以布置在保持器270的孔41a至41c中的对应一者中。371.例如,第一传感器至第三传感器240a、240b和240c中的每一者可以在垂直于光轴的方向上不与线圈单元230-1至230-3中的对应一者重叠。第一传感器至第三传感器240a、240b和240c可以在垂直于光轴的方向上与保持器270重叠。372.例如,线圈单元230-1至230-4可以设置在保持器270的上表面42a上,并且第一传感器至第三传感器240a、240b和240c可以设置在第一电路板250的第一表面60a上。保持器270的上表面42a可以定位成高于第一电路板250的第一表面60a。373.例如,保持器270的上表面42a可以相对于第一电路板250的第一表面60a具有高度差。374.例如,保持器270的上表面42a与第一电路板250的第一表面60a之间在光轴方向上的高度差可以大于第一传感器至第三传感器240a、240b和240c中的每一者在光轴方向上的长度。在另一实施方式中,保持器270的上表面42a与第一电路板250的第一表面60a在光轴方向上的高度差可以等于第一传感器至第三传感器240a、240b和240c中的每一者在光轴方向上的长度。375.图像传感器810在x轴方向和y轴方向上的所有运动以及图像传感器810绕z轴的旋转可以由三个传感器240a、240b和240c检测。376.三个传感器240a、240b和240c中的一者(例如240a)可以检测ois可移动单元在x轴方向上的运动量和/或位移。三个传感器240a、240b和240c中的另一者(例如240b)可以检测ois可移动单元在y轴方向上的运动量和/或位移。三个传感器240a、240b和240c中的剩余一者可以检测ois可移动单元在x轴方向上和/或y轴方向上的运动量和/或位移。可以使用三个传感器240a、240b和240c中的两者或更多者的输出来检测ois可移动单元围绕z轴的旋转运动。377.参照图12b,当将驱动信号(例如,驱动电流)施加至第一线圈单元230-1和第三线圈单元230-3,但不施加至第二线圈单元230-2或第四线圈单元230-4时,由第一线圈单元230-1与第一磁体23a之间的相互作用产生的第一电磁力的方向和由第三线圈单元230-3与第三磁体23c之间的相互作用产生的第三电磁力的方向可以是同一方向、例如x轴方向(例如, x轴方向或-x轴方向),并且ois可移动单元可以沿x轴方向(例如,沿 x轴方向或沿-x轴方向)移动(移位)。378.例如,当将驱动信号(例如,驱动电流)施加至第二线圈单元230-2和第四线圈单元230-4、但不施加至第一线圈单元230-1或第三线圈230-3时,由第二线圈单元230-2与第二磁体23b之间的相互作用产生的第二电磁力的方向和由第四线圈单元230-4与第四磁体23d之间的相互作用产生的第四电磁力的方向可以是同一方向、例如y轴方向(例如, y轴方向或-y轴方向),并且ois可移动单元可以沿y轴方向(例如,沿 y轴方向或沿-y轴方向)移动(移位)。379.例如,当将驱动信号施加至第一线圈单元230-1至第四线圈单元230-4中的每一者时,第一电磁力的方向和第三电磁力的方向是彼此相反的,第二电磁力的方向和第四电磁力的方向是彼此相反的,并且ois可移动单元由于第一电磁力和第三电磁力而旋转的方向和ois可移动单元由于第二电磁力和第四电磁力而旋转的方向相同,ois可移动单元可以绕光轴或z轴旋转或滚动。380.当通过三个通道控制第二线圈230时,可以使用第一线圈单元230-1和第三线圈单元230-3或第二线圈单元230-2和第四线圈单元230-4使ois可移动单元滚动。381.在图12a和12b中所示的实施方式中,第二位置传感器240可以包括三个传感器240a、240b和240c。382.例如,第一传感器240a可以布置在第一电路板250的第一表面60a的第一拐角处,第二传感器240b可以布置在第一电路板250的第一表面60a的第二拐角处,并且第三传感器240c可以布置在第一电路板250的第一表面60a的第三拐角处。可以不在第一电路板250的第一表面60a的第四拐角处设置传感器。383.第一电路板250的第一表面60a的第一拐角和第三拐角可以在对角线方向上面向彼此,并且第一表面60a的第二拐角和第四拐角可以在对角线方向上面向彼此。384.例如,第一传感器240a可以设置在第一电路板250的第一突起52a的第一表面(或上表面)60a上,并且可以在光轴方向上与第一突起52a重叠。385.第二传感器240b可以设置在第一电路板250的第二突起52b的第一表面(或上表面)60a上,并且可以在光轴方向上与第二突起52b重叠。386.第三传感器240c可以设置在第一电路板250的第三突起52c的第一表面(或上表面)60a上,并且可以在光轴方向上与第三突起52c重叠。387.例如,尽管第一传感器240a可以在光轴oa方向上不与第一线圈单元230-1重叠,第二传感器240b可以在光轴oa方向上不与第二线圈单元230-2重叠,并且第三传感器240c可以在光轴oa方向上不与第三线圈单元230-3重叠,但本公开内容不限于此。在另一实施方式中,第一传感器至第三传感器中的每一者的至少一部分可以在光轴方向上与第一线圈单元至第三线圈单元中的对应一者重叠。388.第一传感器240a可以在光轴方向上与第一磁体23a重叠,第二传感器240b可以在光轴方向上与第二磁体23b重叠,并且第三传感器240c可以在光轴方向上与第三磁体23c重叠。389.尽管第二位置传感器240包括三个传感器,但在另一实施方式中,第二位置传感器240可以包括两个传感器。例如,在另一实施方式中,可以省去第一传感器240a和第三传感器240c中的一者。390.图像传感器单元350可以包括运动传感器820、控制器830、存储器512和电容器81a、81b中的至少一者。391.运动传感器820、控制器830、存储器512和电容器81a、81b可以设置或安装至第二电路板800和第一电路板250中的一者。392.例如,运动传感器820、存储器512和电容器81a可以设置在第二电路板800的第二表面44b上。393.控制器830和电容器81b可以设置在第一电路板250的第一表面60a上。例如,控制器830可以设置在第一电路板250的第一区域s1(参见图12a)中。第一区域s1可以是定位在图像传感器810与第一电路板250的第一侧向侧表面或第一侧部之间的区域。394.第一电路板250的第二区域s2可以设置有布线或数据线,图像传感器810的数据通过这些布线或数据线被传输送至第二电路板800。第一区域s1可以是与第二区域s2关于图像传感器810对置的区域。第二区域s2可以是与第二电路板800的第三区域803相邻的区域。图像传感器810可能敏感地受到由布线或数据线产生的噪声的影响,并且图像传感器810的操作和性能可能因噪声而劣化。395.当控制器830设置在第一电路板250的第二区域s2中时,噪声可能由于控制器830的存在而由布线或数据线产生,从而使图像传感器810的操作和性能劣化。396.例如,设置在第二电路板800处的运动传感器820可以经由支承构件220和连接弹性构件280导电地连接至设置在第一电路板250处的控制器830。397.运动传感器820可以输出关于由相机模块10的运动引起的旋转角速度的信息。运动传感器820可以实施为双轴或三轴陀螺仪传感器或角速度传感器。398.存储器512可以根据线圈架110在光轴方向上的位移来存储代码值,以用于af反馈操作。此外,存储器512可以根据ois可移动单元在与光轴方向垂直的方向上的位移来存储代码值,以用于ois反馈操作。另外,存储器512可以存储用于控制器830的操作的算法或程序。399.例如,尽管存储器512可以是例如eeprom(电可擦除可编程只读存储器),但本公开内容不限于此。400.控制器830可以导电地连接至第一位置传感器170和第二位置传感器240。401.控制器830可以使用存储在存储器512中的第一代码值来控制第一位置传感器170的输出信号和供应至第一线圈120的驱动信号,从而执行反馈自动对焦操作。402.此外,控制器830可以使用存储在存储器512中的第二代码值来控制从第二位置传感器240供应的输出信号和供应至第二线圈230的驱动信号,从而执行反馈ois操作。403.尽管控制器830可以是驱动ic类型的,但本公开内容不限于此。例如,控制器830可以导电地连接至第一电路板250的端子262。404.参照图14,第一电路板250可以包括端子262,端子262导电地连接至连接弹性构件280。第二端子262可以替代性地被称为“第二端子部分”或“第二端子单元”。405.例如,第一电路板250的端子262可以经由焊料或导电粘合构件联接至连接弹性构件270。例如,端子262可以实施为多个端子。406.例如,第一电路板250的第二端子262可以设置在第一电路板250的第二表面(例如,下表面)60b上,并且可以在光轴方向上对应于或面向连接弹性构件270的连接弹簧281。407.第一电路板250的第二端子262可以与对应的连接弹簧281的至少一部分重叠。尽管第一电路板250可以是印刷电路板或柔性印刷电路板(fpcb),但本公开内容在这方面不受限制。408.第一电路板250可以设置在保持器270与连接弹性构件280之间。409.连接弹性构件280可以联接至保持器270。连接弹性构件280可以用于允许ois可移动单元移动并允许信号的导电传输。换句话说,连接弹性构件280可以将支承构件220导电地连接至第一电路板250的端子262。410.例如,连接弹性构件280可以设置在保持器270下方。411.例如,连接弹性构件280可以经由粘合构件联接至保持器270的下表面42b。例如,连接弹性构件280可以联接至保持器270的下表面42b的第一表面36a。412.连接弹性构件280可以将支承构件220导电地连接至第一电路板250,并且可以包括弹性变形部分,该弹性变形部分是可弹性地变形的。连接弹性构件280的弹性变形部分可以联接至支承构件220。413.连接弹性构件280可以包括与支承构件220对应的连接弹簧281。414.例如,连接弹性构件280可以包括多个连接弹簧281。所述多个连接弹簧281可以对应于各个支承构件220。415.多个连接弹簧281可以设置成彼此在导电方面隔离或间隔开。416.连接弹簧281可以由导电材料、例如诸如铜或铜合金的金属制成。417.例如,连接弹簧281可以由选自金(au)、银(ag)、铂(pt)、钛(ti)、锡(sn)、铜(cu)和锌(zn)中的至少一者制成。此外,连接弹性构件280可以由膏体或焊膏制成,该膏体或焊膏包括选自具有优异结合力的金(au)、银(ag)、铂(pt)、钛(ti)、锡(sn)、铜(cu)和锌(zn)中的至少一者。418.例如,连接弹簧281可以由具有抗拉强度为1000兆帕或更高的金属材料制成。例如,连接弹簧281可以由包括铜的二元合金或三元合金制成。419.参照图15至图18,连接弹簧281可以包括:第一联接器31,第一联接器31联接至第一电路板250的端子262;第一联接器32,第二联接器32联接至支承构件220;以及连接器33,连接器33将第一联接器31连接至第二联接器32。420.连接弹簧281的第一联接器31可以由保持器270支承。例如,第一联接器31可以设置在保持器270的下表面42b的第一表面36a上,并且可以由保持器270的下表面42b支承。421.例如,第一联接器31可以邻近保持器270中的至少一个凹槽272设置在保持器270的下表面42b的第一表面36a上。422.例如,第一联接器31可以包括:第一部分31a,第一部分31a由保持器270支承并连接至连接器33;以及第二部分31b,第二部分31b连接至第一部分31a连接并联接至第一电路板250的端子262。423.例如,第一联接器31的第一部分31a可以在光轴方向上与保持器270的下表面42b的第一表面36a重叠,并且可以联接至第一表面36a。424.第一联接器31的第二部分31b可以在光轴方向上不与保持器270的下表面42b重叠。第一联接器31的第二部分31b的至少一部分可以在光轴方向上与第一电路板250的端子262重叠。425.例如,第二部分31b可以从保持器270的内表面沿朝向第一电路板250的端子262的方向突出。426.例如,第一联接器31的第二部分31b可以定位成与下述部分19a相反:在部分19a处,第一联接器31与连接器33相接。427.第一联接器31的第一部分31a的宽度可以大于其他部分32b和33的宽度,以增加与绝缘构件285和保持器270的结合力。428.例如,第一联接器31的第一部分31a的宽度w1可以大于第二部分31b的宽度w2。换句话说,第一联接器31的第一部分31a的表面积可以大于第二部分31b的表面积。这样做的原因是为了相对地增加由保持器270支承的第一部分31的宽度w1(或表面积),以便由保持器270稳定地支承第一部分31a。429.此处,宽度w1和w2可以是第一联接器31在与朝向第一电路板250的端子262的方向垂直的方向上的长度。430.在另一实施方式中,第一部分31a的宽度w1可以等于或小于第二部分31b的宽度w2。431.第二联接器32可以经由焊料902或导电粘合构件联接至支承构件220的一个端部(例如下端部)。432.例如,第二联接器32可以设置成在光轴方向上保持器270中的孔270a重叠。433.第二联接器32可以具有孔32a,支承构件220延伸穿过孔32a。434.支承构件220的穿过第二联接器32中的孔32a的端部可以经由导电粘合构件或焊料902直接联接至第二联接器32,并且第二联接器32可以导电地连接至支承构件220。435.例如,第二联接器32可以包括孔32a和孔32a周围的区域,该区域用作其中供设置焊料902以便将联接器32联接至支承构件220的区域。尽管第二联接器32构造成在图16中具有圆形形状,但本公开内容不限于此。在另一实施方式中,第二联接器32可以构造成具有多边形形状(例如,四边形形状)或椭圆形形状。436.例如,第二联接器32的直径k可以小于第一联接器31的第一部分31a的宽度w1。在另一实施方式中,第二联接器32的直径k可以等于或大于第一联接器31的第一部分31a的宽度w1。437.连接器33可以将第一联接器31的第一部分31a连接至第二联接器32,并且可以包括至少一个线性部分和至少一个弯曲部分。438.例如,弯曲部分可以构造成从垂直于光轴的线性部分向左或向右弯曲地延伸。例如,尽管连接器33可以构造成具有螺旋形状,但本公开内容不限于此。439.例如,连接器33可以包括弯曲部分,该弯曲部分顺时针或逆时针地延伸。换句话说,连接器33可以沿与图像传感器在z轴方向上的旋转对应的方向弯曲。因此,连接器33能够将图像传感器沿z轴方向旋转时对连接弹簧281的损害最小化,其结果是能够防止在连接弹簧281中产生裂缝并防止连接弹簧281与绝缘构件285分离。440.例如,连接器33可以包括:第一线性部分33-1,第一线性部分33-1连接至第一联接器31;第一弯曲部分34-1,第一弯曲部分34-1从第一线性部分33-1沿第一侧向方向弯曲地延伸;第二线性部分33-2,第二线性部分33-2连接至第一弯曲部分34-1;第三弯曲部分34-2,第三弯曲部分34-2从第二线性部分33-2沿第二侧向方向弯曲地延伸;第三线性部分33-3,第三线性部分33-3连接至第三弯曲部分34-2;第三弯曲部分34-3,第三弯曲部分34-3从第三线性部分33-3沿第三侧向方向弯曲地延伸;第四线性部分33-3,第四线性部分33-3连接至第三弯曲部分34-3;第四弯曲部分34-4,第四弯曲部分34-4从第四线性部分33-4沿第四侧向方向弯曲地延伸;以及第五线性部分33-5,第五线性部分33-5将第四弯曲部分34-4连接至第二联接器32。例如,尽管第一侧向方向至第四侧向方向中的每一者都可以是向左方向,但本公开内容不限于此。在另一实施方式中,第一侧向方向至第四侧向方向中的至少一者可以是向右方向。441.连接器33的弯曲部分34-1至34-5中的至少一者可以构造成具有圆形形状。442.第一线性部分33-1至第五线性部分33-5中的每一者的宽度可以与第一弯曲部分34-1至第四弯曲部分34-5中的每一者的宽度不同。例如,由于应力集中在弯曲部分中,因此第一弯曲部分34-1至第四弯曲部分34-5中的每一者的宽度可以大于第一线性部分33-1至第五线性部分33-5中的每一者的宽度,从而防止由施加至连接器33的应力引起的对连接器33的损害。443.连接弹簧281可以在其不同部分处具有不同的宽度。444.连接器33的宽度可以小于第一部分33的宽度,以便施加弹性力。445.连接器33的宽度w3可以小于第一联接器31的第一部分31a的宽度w1、第一联接器31的第二部分31b的宽度w2、以及第二联接器32的直径k中的任一者。因此,连接弹簧281能够灵活地支承ois可移动单元,并且允许ois可移动单元沿垂直于光轴的方向容易地移动。446.例如,连接器33可以具有20μm至1000μm的宽度。447.例如,如果连接器33的宽度小于20μm,则连接弹簧281的整体刚度可能会降低,并且因此连接弹簧281的可靠性可能会降低。同时,如果连接器33的宽度大于100μm,则连接弹簧281的弹性力可能会降低,并且因此激活构造成使ois可移动单元移位的第二线圈230所需的电压可能会增加,从而增加功耗。448.在另一实施方式中,连接器33的宽度可以等于或大于第二联接器32的直径k。449.第一联接器31的厚度t1、连接器32的厚度t2和第二联接器32的厚度可以相同。在另一实施方式中,第一联接器31的厚度t1、连接器32的厚度t2和第二联接器32的厚度中的至少一者可以与其余的厚度不同。例如,连接器32的厚度t2可以小于第一联接器31的厚度和第二联接器32的厚度。450.第二联接器32和连接器33可以在光轴方向上与保持器270中的凹槽272重叠。例如,第二联接器32和连接器33可以设置在保持器270中的凹槽272中。例如,第二联接器32和/或连接器33可以设置成与保持器270间隔开。451.参照图15和图16,连接弹性构件280可以包括多个连接弹簧。多个连接弹簧可以被分类成多个组。例如,多个组可以替代性地被称为“多个连接器”、“多个弹性部分”或“多个连接弹性构件”。452.例如,连接弹性构件280可以包括与第一电路板250的四个侧部部分(四个侧向侧表面)或保持器270的四个侧部部分(或四个侧向侧表面)对应的四个组1a至4a。453.多个组1a至4a中的每个组可以包括多个连接弹簧1-1至1-9、2-1至2-9、3-1至3-9、或4-1至4-9。454.此外,第一电路板250的端子262可以被分类成与连接弹性构件280的组1a至4a对应的多个组。第一电路板250的多个组中的每个组可以包括多个端子p1至p9、s1至s9、r1至r9、或q1至q9。455.例如,第一电路板250的多个端子p1至p9、s1至s9、r1至r9和q1至q9中的每一者可以经由焊料联接至多个连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9中的对应的一者。456.例如,包括在多个组1a至4a中的连接弹簧的数目可以相同。457.在另一实施方式中,包括在彼此相对定位的两个组中的连接弹簧的数目可以相同。458.在另一实施方式中,包括在连接弹性构件280的两个相邻组中的连接弹簧的数目可以彼此不同。在另一实施方式中,包括在多个组1a至4a中的至少一个组中的连接弹簧的数目可以与包括在其余组中的每个组中的连接弹簧的数目不同。459.例如,为了在平衡状态下灵活地支承ois可移动单元,连接弹性构件280的多个组1a至4a可以设置成关于中心点403双径向对称。460.在另一实施方式中,连接弹性构件280的多个组1a至4a可以设置成关于中心点403四径向对称。461.例如,保持器270可以包括四个拐角30a至30d。第一组1a和第三组3a可以设置成在横向方向上彼此相对,并且第二组2a和第四组4a可以设置成在纵向方向上彼此相对。横向方向和纵向方向可以彼此相交。462.第一组1a可以在第一拐角30a与第二拐角30b之间设置在保持器270的第二表面70b的第一区域中,并且第二组1a可以在第二拐角30b与第三拐角30c之间设置在保持器270的第二表面70b的第二区域中。第三组3a可以在第三拐角30c与第四拐角30d之间设置在保持器270的第二表面70b的第三区域中,并且第四组4a可以在第四拐角30d与第一拐角30a之间设置在保持器270的第二表面70b的第四区域中。463.保持器270的第一拐角30a和第三拐角30c可以定位成在第一对角线方向上彼此相对,并且保持器270的第二拐角30b和第四拐角30d可以定位成在第二对角线方向上彼此相对。第一对角线方向和第二对角线方向可以彼此垂直。464.第一组1a和第三组3a的中心可以定位成相对于第一中心线401在相反方向上偏离,并且第二组2a和第四组4a的中心可以定位成相对于第二中心线402在相反方向上偏离。465.此处,每个组的中心可以是包括每个组在该组中所包括的连接弹簧被布置所沿的方向上的总长度的空间中心。总长度可以是每个组中的第一个连接弹簧与最后一个连接弹簧之间的距离。466.例如,第一中心线401可以是延伸穿过中心403并且平行于从保持器270的其中设置有第一组1a的第一区域朝向保持器270的其中设置有第三组3a的第三区域的方向的线。替代性地,第一中心线401可以是延伸穿过中心403并且平行于保持器270的第一外表面的线。467.例如,第二中心线402可以是延伸穿过中心403并且平行于从保持器270的其中设置有第二组的第二区域朝向保持器270的其中设置有第四组的第四区域的方向的线。替代性地,第二中心线402可以是延伸穿过中心403并且垂直于保持器270的第一外表面的线。468.例如,中心403可以是保持器270中的孔70的中心、第一电路板250的中心、或连接弹性构件的空间中心。469.例如,设置在第一中心线401的一侧(例如,右侧)处的第一组1a(或第三组3a)的连接弹簧的数目和设置在第一中心线401的另一侧(例如,左侧)处的第一组1a(或第三组3a)的连接弹簧的数目可以彼此不同。470.例如,设置在第二中心线402的一侧(例如,右侧)处的第二组2a(或第四组4a)的连接弹簧的数目和设置在第二中心线402的另一侧(例如,左侧)处的第二组2a(或第四组4a)的连接弹簧的数目可以彼此不同。471.参照图16,连接弹性构件280还可以包括绝缘构件285。绝缘构件285可以替代性地被称为“绝缘层”。例如,绝缘构件285可以包括聚酰亚胺。472.绝缘构件285可以环绕连接弹簧281的至少一部分。例如,绝缘构件285可以环绕连接弹簧281的第一部分31a的至少一部分。例如,连接弹簧281的第一部分31a的上表面可以联接至保持器270的下表面42a的第一表面36a,并且绝缘构件285可以覆盖连接弹簧281的第一部分31a的下表面。473.粘合构架可以被置于或设置在绝缘构件285与连接弹簧281之间以及绝缘构件285与虚设构件28-1至28-4之间,以便将它们彼此附接。474.例如,连接弹簧281的第一联接器31的第二部分31a、第二联接器32和连接器33可以从绝缘构件285暴露。475.绝缘构件285可以将组1a至4a的连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9彼此连接。476.绝缘构件285可以对连接弹性构件280的连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9进行支承,并且可以联接或附接至保持器270的下表面42b的第一表面36a。477.连接弹性构件280还可以包括一个或更多个虚设构件28-1至28-4。478.例如,虚设构件28-1至28-4可以与连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9间隔开,并且可以设置在保持器270的下表面42b上。479.绝缘构件285可以环绕或覆盖虚设构件28-1至28-4的至少一部分。因此,可以牢固地保持绝缘构件285的形状,以提高绝缘构件285与保持器270之间的粘合力。480.虚设构件28-1至28-4可以替代性地被称为“增强部分”或“增强图案”,因为它们增强了连接弹性构件280的刚度。481.虚设构件28-1至28-4中的每一者可以经由粘合剂联接至保持器270的下表面42b,并且可以具有至少一个通孔28a或凹槽,以便增加虚设构件与保持器270之间的联接力。482.虚设构件28-1至28-4可以不与连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9导电地连接。尽管虚设构件28-1至28-4不彼此导电地连接,但本公开内容不限于此。在另一实施方式中,虚设构件可以彼此连接。483.例如,绝缘构件285可以在其中具有孔或腔。例如,尽管绝缘构件285可以构造成从上面看时具有多边形的形状,例如整体上呈四边形的环形形状,但本公开内容不限于此。484.例如,尽管连接弹性构件280可以包括四个虚设构件28-1至28-4,但虚设构件的数目不限于此。在另一实施方式中,虚设构件的数目可以是大于或等于1的任何数目。485.例如,虚设构件28-1至28-4中的每一者可以设置在连接弹性构件280的两个相邻组1a和2a、2a和3a、3a和4a、或4a和1a之间。486.例如,连接弹性构件280可以包括设置在绝缘构件285的在第一组1a与第二组2a之间的第一拐角或第一拐角区域处的虚设构件28-3、设置在绝缘构件285的在第二组2a与第三组3a之间的第二拐角或第二拐角区域处的虚设构件28-2、设置在绝缘构件285的在第三组3a与第四组4a之间的第三拐角或第三拐角区域处的虚设构件28-1、以及设置在绝缘构件285的在第四组4a与第一组1a之间的第四拐角或第四拐角区域处的虚设构件28-4。487.虚设构件28-1至28-4中的每一者可以具有构造成避免与保持器270的突起275发生空间干涉的避让部分。尽管避让部分27a可以构造成具有凹槽或孔的形式,但本公开内容不限于此。488.参照图16,绝缘构件285可以包括本体85a和延伸部85b,本体85a设置在连接弹簧1-1至1-9、2-1至2-9、3-1至3-9和4-1至4-9的第一联接器31的第一部分31a、保持器270的下表面43b的一部分以及虚设构件28-1至28-4的一些部分上,延伸部85b朝向虚设构件28-1至28-4的其他部分延伸。489.例如,绝缘构件285的本体85a可以邻近保持器270中的孔70设置在保持器270的下表面42b的第一表面36a上,并且可以构造成具有环的形式,该环具有闭合曲线形状。例如,尽管本体85a可以构造成具有四边形环的形式,但本公开内容不限于此。在另一实施方式中,本体85a可以构造成具有圆形或多边形环的形式。490.例如,本体85a可以在其中具有孔或腔,该孔或腔在光轴方向上与第二电路板800中的孔800a和保持器270中的孔对应、重叠或对准。491.尽管延伸部85b可以构造成具有线性形状,但本公开内容不限于此。在另一实施方式中,延伸部85b可以构造成具有线性形状和弯曲形状中的至少一者。例如,延伸部85b可以包括多个延伸部,所述多个延伸部可以设置成彼此间隔开。例如,延伸部85b可以从本体85a朝向保持器270的外表面延伸。例如,延伸部可以设置成环绕保持器270中的凹槽272。492.延伸部85b可以用于增加与虚设构件28-1至28-4中的每一者的接触面积,从而进一步增加连接弹性构件280的刚度。493.支承构件220可以将第二电路板800导电地连接至连接弹性构件280。494.支承构件200可以包括与连接弹性构件280的组1a至4a对应的多组支承构件。多个组中的每个组可以包括多个支承构件(或布线)。495.例如,支承构件200可以包括与多个连接弹簧对应的多个支承构件。支承构件可以替代性地被称为“布线”。496.支承构件220可以在其一个端部处联接至第二电路板800,并且在其另一个端部处联接至连接弹簧281的第二联接器32。497.例如,支承构件220的一个端部可以通过第二电路板800中的孔800b经由第一焊料901联接至第二电路板800的第一表面(例如,上表面)44a。例如,支承构件220的一个端部可以联接并导电地连接至第二电路板800的端子800b。498.支承构件220的另一个端部可以通过第二联接器32中的孔32a经由第二焊料902联接至连接弹簧281的第二联接器32的下部部分或下表面。499.支承构件220可以延伸穿过壳体450中的避让区域和保持器270中的孔270a,从而避免与壳体450和保持器270发生空间干涉。500.支承构件220中的每一者可以实施为是导电的并提供弹性支承的构件,例如,悬线、板簧或螺旋弹簧。501.图像传感器单元350还可以包括滤光器610。图像传感器单元350还可以包括滤光器保持器600,滤光器610设置、坐置或接纳在滤光器保持器600中。滤光器保持器600可以替代性地被称为“传感器基座”。502.滤光器610可以用于防止穿过透镜镜筒400的特定频带内的光被引入到图像传感器810中。503.滤光器610可以是例如红外光阻隔滤光器,但不限于此。例如,滤光器610可以定向成与垂直于光轴oa的x-y平面平行。504.滤光器610可以设置在透镜模块400下方。505.滤光器保持器600可以设置在af操作单元100下方。例如,滤光器保持器600可以设置在第一电路板250上。506.滤光器保持器600可以联接至第一电路板250的第一表面60a的环绕图像传感器810的区域,并且可以通过第二电路板800中的孔800a和保持器270中的孔70暴露。例如,滤光器保持器600可以通过第二电路板800中的孔800a和保持器270中的孔70暴露。507.例如,滤光器保持器600可以联接至第一表面(例如,上表面)的环绕第一电路板250的坐置区域260a的区域。尽管坐置区域域260a是与图12a中的第一电路板250的第一表面60a相同的表面,但本公开内容不限于此。在另一实施方式中,坐置区域260a可以是凹槽或突起。508.在另一实施方式中,滤光器保持器600可以联接至保持器270或af操作单元100。509.保持器270中的孔70可以使设置在第一电路板250处的滤光器保持器600和穿过孔70设置在滤光器保持器600处的滤光器610暴露。510.滤光器保持器600可以在其中具有孔61a,孔61a形成在滤光器保持器600的安装或设置有滤光器610的区域中,以便允许已经穿过滤光器610的光进入图像传感器810。滤光器保持器600中的孔61a可以构造成具有通孔的形式,该通孔在光轴方向上穿过滤光器保持器600形成。例如,滤光器保持器600中的孔61a可以穿过滤光器保持器600的中心形成,并且可以定位成对应于或面向图像传感器810。511.滤光器保持器600可以具有坐置部分500,滤光器610坐置在坐置部分500中。滤光器610可以设置、坐置或安装在坐置部分500中。坐置部分500可以形成为环绕孔61a。在另一实施方式中,滤光器保持器600的坐置部分500可以构造成具有从滤光器610的上表面突出的突起的形式。512.图像传感器单元350还可以包括设置在滤光器610与坐置部分500之间的粘合构件612,并且滤光器610可以经由粘合构件612联接或附接至滤光器保持器600。513.图像传感器单元350还可以包括设置在滤光器保持器600与第一电路板250之间的粘合构件61,并且滤光器保持器600可以经由粘合构件61联接或附接至第一电路板260。514.例如,粘合构件612和61可以是环氧树脂、热硬化粘合剂或紫外线硬化粘合剂。515.相机模块10还可以包括盖构件300、基座210和底盖219中的至少一者,以便在其中容纳af操作单元100和图像传感器单元350,以保护af操作单元100和图像传感器单元350免受外部冲击并防止引入外部异物。516.盖构件300可以构造成具有盒子的形式,该盖构件300在底部处敞开,并且包括上板301和侧板302。盖构件300的侧板302可以联接至af操作单元100的壳体140的外表面。在另一实施方式中,盖构件300的侧板302的下部部分可以联接至基座210。517.盖构件300的上板301可以构造成具有多边形形状,例如,四边形形状、八边形形状等。盖构件300可以在其中具有孔303,孔303穿过上板301形成,以便将联接至线圈架110的透镜(未示出)暴露于外部光。盖构件300的侧板302中的一个侧板可以设置有凹槽304,电路板910的端子构件95通过凹槽304暴露。518.基座210可以设置在保持器270下方。基座210可以构造成具有与盖构件300、壳体450或保持器270的形状一致或对应的形状,例如四边形形状。519.例如,基座210可以包括设置在保持器270下方的下板210a和从下板210a朝向第二电路板800延伸的侧板210b。基座210可以具有穿过下板210a形成的孔210c。520.基座210中的孔210c可以是沿光轴方向穿过基座210形成的通孔。在另一实施方式中,基座210可以在其中不具有孔210c。521.例如,基座210的侧板210b可以联接至壳体450。在另一实施方式中,基座210的侧板210b可以联接至盖构件300的侧板302。522.底盖219可以设置在基座210下方,以便封闭基座210中的孔210c。在另一实施方式中,可以省去底盖219。523.在下文中,将关于ois操作来描述图像传感器单元350的固定部分(例如,“ois固定部分”)和可移动部分(例如,“ois可移动部分”)。524.图像传感器单元350可以包括ois固定部分、ois可移动部分以及联接至这两个部分以便将这两个部分彼此连接的弹性支承构件220和280。ois可移动部分可以相对于ois固定部分沿垂直于光轴oa的方向移动。弹性支承构件220和280可以替代性地被称为“支承构件”或“弹性构件”。525.设置在ois固定部分下方的ois可移动部分可以借助于弹性支承构件220和280与ois固定部分间隔开预定距离。具体地,ois可移动部分可以经由支承构件220和连接弹性构件280、通过由磁体23与线圈230之间的相互作用产生的电磁力而相对于ois固定部分移动。526.弹性支承构件220和280的一个端部(例如,支承构件220的一个端部)可以联接至第二电路板800,并且弹性支承构件220和280的另一个端部(例如,连接弹簧281的第一部分31)可以联接至第一电路板250。527.第二电路板800和第一电路板250可以经由弹性支承构件220和280彼此导电地连接。528.通过第二线圈230与磁体23之间的相互作用而产生的电磁力,ois可移动部分可以相对于ois固定部分沿垂直于光轴的方向移动。529.例如,通过磁体23与第二线圈230之间的相互作用,图像传感器810可以沿垂直于光轴oa的方向移位或倾斜,或者可以绕光轴oa旋转。例如,光轴方向可以是与图像传感器810的一个表面垂直的方向。例如,图像传感器810的一个表面可以是图像传感器810的上表面。替代性地,图像传感器810的一个表面可以是对应于或面向透镜模块400或滤光器610的下表面的表面。例如,图像传感器810的一个表面可以是活动区域。530.借助支承构件220和连接弹性构件280,ois可移动部分可以被弹性地支承,并且可以沿垂直于光轴的方向移动。531.ois固定部分可以包括第二电路板800、壳体450和磁体23。此外,ois固定部分可以包括基座210、盖构件300和底盖219中的至少一者。此外,ois固定部分可以包括联接至第二电路板800的元件,例如,运动传感器820和电容器81a。532.ois可移动部分可以包括第一电路板250、保持器270、第二线圈230和图像传感器810。533.此外,ois可移动部分可以包括联接至第一电路板250的元件,例如,第二位置传感器240、控制器830、存储器512和电容器81b。此外,ois可移动部分可以包括滤光器保持器600和滤光器610。534.例如,ois可移动部分可以包括:第一电路板250,第一电路板250联接至连接弹性构件280;保持器270,保持器270联接至第一电路板260;以及图像传感器810,图像传感器810设置在第一电路板250处,并且可以由支承构件220和连接弹性构件280弹性地支承。535.磁体23可以设置在ois固定部分处,并且第二线圈230可以设置在ois可移动部分处。借助磁体23与第二线圈230之间的相互作用,ois可移动部分可以相对于ois固定部分移动或倾斜。536.参照图19a,为了利用由磁体23与第二线圈230之间的相互作用而产生的电磁力使ois可移动部分相对于ois固定部分移动和倾斜,ois可移动部分可以与ois固定部分间隔开。537.例如,第一电路板250和图像传感器800(801)可以与第二电路板800、壳体450和基座210间隔开。538.例如,在ois可移动部分的初始位置处,保持器270的外表面可以与基座210的内表面间隔开预定距离d1。539.此外,例如,在ois可移动部分的初始位置处,保持器270的下表面和第一电路板250的下表面可以与基座210的前表面(或上表面)间隔开预定距离h1。此外,在ois可移动部分的初始位置处,保持器270的下表面和第一电路板250的下表面可以与底盖219的前表面(或上表面)间隔开。540.此外,在ois可移动部分的初始位置处,焊料902可以与基座210的前表面(或上表面)间隔开预定距离。541.ois可移动部分的初始位置可以是在没有电力施加至第二线圈230的状态下ois可移动部分的初始位置,或者是作为支承构件220和连接弹性构件280仅由于ois可移动部分的重量而弹性变形的结果的ois可移动部分所处的位置。542.另外,ois可移动部分的初始位置可以是当重力沿从第二电路板800至第一电路板250的方向作用时或当重力沿从第一电路板250至第二电路板800的方向作用时ois可移动部分所处的位置。543.图像传感器810可以是电荷耦接设备(ccd)、金属氧化物半导体(mos)、cpd图像传感器和cid图像传感器中的任一者,但不限于此。544.尽管第一电路板250在实施方式中可以实施为单个电路板,但本公开内容不限于此。在另一实施方式中,第一电路板可以包括第三板和第四板,第三板和第四板中的每一者可以包括构造成彼此导电地连接的附加端子,并且连接弹性构件280的第一联接器31可以导电地连接至第三板和第四板中的一者。545.图22图示了根据另一实施方式的连接弹性构件280-1。546.参照图22,连接弹性构件280-1可以包括板部分280a和弹性部分280b。板部分280a可以替代性地被称为“板构件”、“电路板”、“板”或“电路构件”。547.板部分280a可以包括与第一电路板250的端子262对应的多个端子41。548.板部分280a可以在其中具有与保持器270中的孔70对应的孔79。板部分280a中的孔79可以是通孔,该通孔沿光轴方向穿过板部分280a形成。549.例如,板部分280a中的孔79可以暴露第一电路板250的第二表面60b,并且可以暴露第一电路板250的端子262。550.板部分280a的端子41可以包括第一部分41a和第二部分41b。端子41的第一部分41a可以设置在板部分280a中,并且端子41的第二部分41b可以从板部分289a暴露于外部,并且可以经由焊料联接至第一电路板250的端子262。551.板部分280a可以设置在保持器270的下表面42b的第一表面36a上,并且可以经由粘合构件联接或附接至保持器270的下表面42b的第一表面36a。552.例如,板部分280a可以实施为印刷电路板或柔性印刷电路板(fpcb)。553.弹性部分280b可以从板部分280a暴露,并且可以连接至板部分280a的端子41。554.弹性部分280b可以包括联接至支承构件220的联接器32a和将联接部分32a连接至端子41的连接器33a。555.弹性部分280b和板部分280a的端子41可以对应于图18中所示的连接弹簧281。556.例如,端子41的第一部分41a可以对应于图18中所示的连接弹簧281的第一部分31a,并且端子41的第二部分41b可以对应于图18中所示的连接弹簧281的第二部分31b。对连接弹簧281的第一部分31a和第二部分31b的描述可以在修改或未修改的情况下适用于端子41的第一部分41a和第二部分41b。557.此外,弹性部分280b的联接器32a可以对应于图18中所示的连接弹簧281的第二联接器32,并且弹性部分280b的连接器33a可以对应于图18中所示的连接弹簧281的连接器33。对连接弹簧281的第二联接器32和连接器33的描述可以在修改或未修改的情况下适用于弹性部分280b的联接器32a和连接器33a。558.对图15和图16中所示的连接弹性构件280的组1a至4a的描述可以在修改或未修改的情况下适用于图24中所示的连接弹性构件280-1。559.板部分280a可以包括图15和图16中所示的虚设构件28-1至28-4,并且对虚设构件28-1至28-4的描述可以在修改或未修改的情况下适用于板部分280a的虚设构件。560.图23是根据本发明的另一实施方式的相机模块20的分解立体图。图23中的与图2中的附图标记相同的附图标记表示相同的部件,并且简要地给出或省去对相同部件的描述。561.参照图23,相机模块20可以包括透镜模块400和图像传感器单元350。562.图23中所示的相机模块20的透镜模块400可以或不可以沿光轴方向移动,并且可以沿光轴方向固定。563.此外,图23中所示的透镜模块400可以或不可以沿垂直于光轴oa的方向移动,并且可以沿垂直于光轴oa的方向固定。564.相机模块20还可以包括图2中所示的盖构件300。565.例如,透镜模块400可以联接、附接或固定至保持器600和第二电路板800。例如,透镜模块400的下部部分、下端部或下表面可以联接、附接或固定至保持器600的上表面或第二电路板800的上表面。566.此外,透镜模块400可以联接、附接或固定至盖构件300。567.随着相机技术的发展,图像的分辨率变高,并且因此图像传感器的尺寸增加。由于图像传感器的尺寸增加,透镜模块的尺寸和用于使透镜模块移动的致动器的尺寸也增加。因此,不仅透镜模块的重量,而且用于使透镜模块移动的其他致动器部件的重量也增加。568.根据本发明的实施方式,使用以透镜移位的方式操作的af操作单元(或第一致动器)100执行自动对焦,并且使用以图像传感器移位的方式操作的图像传感器单元(或第二致动器)350执行光学图像稳定(ois),从而提高相机设备的可靠性。569.该实施方式能够利用传感器移位的方式执行5轴手抖动校正。例如,5轴手抖动可以包括两个角度手抖(例如,俯仰和偏转)、两个移位手抖动(例如,x轴移位和y轴移位)、以及一个旋转手抖动(例如,滚动)。570.图24图示了根据实施方式的磁体23a、ois线圈单元230-1、ois位置传感器240a、保持器270和第一电路板250的布置。图25图示了根据比较示例的磁体60、ois线圈单元40、ois位置传感器50、第一电路板30和保持器30的布置。571.在图25中所示的比较示例中,ois线圈单元40和ois位置传感器50可以设置或安装在第一电路板30的第一表面(例如,上表面)上。保持器20可以设置在第一电路板30下方。572.ois线圈单元40可以具有在形成其中央中的开口或孔,并且ois位置传感器50可以设置在ois线圈单元40中的开口或保持器中。ois位置传感器50可以在垂直于光轴的方向或与第一电路板30的上表面平行的方向上与ois线圈单元40重叠。换句话说,ois线圈单元50和ois位置传感器50可以设置成与第一电路板30的第一表面(例如,上表面)相邻。573.当将驱动信号施加至ois线圈单元40以进行ois操作时,可以从ois线圈单元40产生磁场。为了执行准确的ois反馈操作,ois位置传感器50必须输出与仅由固定至ois固定部分的磁体60产生的磁场的检测结果对应的输出。然而,由于ois线圈单元40和ois位置传感器50在图25中所示的比较示例中彼此相邻地设置,因此ois位置传感器50的输出可能受到由ois线圈单元40产生的磁场的极大影响,从而使ois反馈操作的准确性和可靠性劣化。574.此外,由于ois位置传感器50和ois线圈单元40在垂直于光轴的方向上彼此重叠,因此ois位置传感器50的输出可能受到由ois线圈单元40产生的磁场的极大影响,从而使ois反馈操作的准确性和可靠性劣化。575.图26图示了关于输入至ois线圈单元40的驱动信号和ois位置传感器50的输出的频率响应特性。在图26中,x轴指示频率,并且y轴指示增益。g1指示关于增益的频率响应特性。576.参照图26,由于由从ois线圈单元40产生的磁场引起的影响,可能存在这样的现象38a,即ois位置传感器50的输出在某个频率范围内(例如,200hz至300hz)异常地减小。由于这种现象38a,ois反馈操作的可靠性可能劣化。577.与此相反,在图24中所示的实施方式中,ois位置传感器(例如,240a)可以设置在ois线圈单元(例如,230-1)下方,并且ois位置传感器(例如,240a)和ois线圈单元(例如,230-1)可以在垂直于光轴的方向上或在与第一电路板250的上表面平行的方向上不彼此重叠。578.例如,磁体23a与ois线圈单元230-1在光轴方向上的距离d12可以在0.05mm至0.2mm的范围内。例如,d12可以在0.1mm至0.18mm的范围内。具体地,d12可以在0.12mm至0.15mm的范围内。579.此外,例如,ois线圈单元230-1在光轴方向上的长度d13可以在0.1mm至0.5mm的范围内。具体地,d13可以在0.2mm至0.4mm的范围内。更具体地,d13可以在0.25mm至0.3mm的范围内。580.例如,磁体23a与ois位置传感器(例如,240a)之间在光轴方向上的距离d11可以在0.25mm至0.8mm的范围内。具体地,d11可以在0.3mm至0.5mm的范围内。更具体地,d11可以在0.35mm至0.47mm的范围内。581.如果d11大于0.8mm,则由ois位置传感器240a检测到的磁体23a的磁场的强度可能衰减,并且因此ois位置传感器240a的灵敏度可能会劣化。582.如果d11小于0.25mm,则必须减小ois线圈单元230-1在光轴方向上的长度d13,以防止ois线圈单元和ois位置传感器在垂直于光轴的方向上彼此重叠。在这种情况下,由ois线圈单元与磁体之间的相互作用而产生的电磁力可能会减小。583.同时,ois位置传感器240a的厚度d14可以在0.2mm至0.4mm的范围内。具体地,d14可以在0.23mm至0.3mm的范围内。584.例如,保持器270的上板的厚度d15可以在0.2mm至0.3mm的范围内。具体地,d15可以在0.2mm至0.25mm的范围内。例如,d15可以是保持器270的上表面42a与保持器270的下表面42b的第二表面36b之间的距离。585.例如,ois线圈单元230-1的下表面(或端部)与ois位置传感器240a的上表面之间的距离(在下文中,被称为“第一距离”)可以在0.01mm至0.2mm的范围内。具体地,第一距离可以在0.02mm至0.1mm的范围内。更具体地,第一距离可以在0.02mm至0.05mm的范围内。586.如果第一距离大于0.2mm,则ois位置传感器240a与磁体23a之间的距离可能过度地增加,并且ois位置传感器240a的输出可能降低,从而降低灵敏度。如果第一距离小于0.01mm,则ois位置传感器240a的输出受ois线圈单元230-1的磁场影响的程度可能随着第一距离的增加而增加。然而,ois位置传感器240a的输出受ois线圈单元230-1的磁场影响的程度可能小于图26中所示的比较示例中的程度。587.在另一实施方式中,ois线圈单元230-1的下表面(或下端部)和ois位置传感器240a的上表面可以彼此齐平,并且第一距离可以为零。588.与比较示例相比,ois位置传感器240a可以与ois线圈单元230-1间隔开更大距离,并且可以在垂直于光轴的方向上不与ois线圈单元230-1重叠。因此,根据本发明的实施方式,可以抑制或减少由ois线圈单元40的磁场对ois位置传感器的输出的影响,并且可以确保ois反馈操作的准确性和可靠性。589.图27图示了根据图24中所示的实施方式的关于输入至ois线圈单元230-1的驱动信号和ois位置传感器240a的输出的频率响应特性。在图27中,x轴指示频率,并且y轴指示增益。g2指示关于增益的频率响应特性。在下文中,图26中的频率响应被称为“情况1”,并且图27中的频率响应特性被称为“情况2”。590.在情况2中,在情况1中出现的现象38a减弱或不出现(38b)。591.在情况1中,由于受到ois线圈单元40的磁场影响,发现在200hz至300hz范围内的增益异常地降低(大约-47db)。因此,ois反馈操作的可靠性可能劣化。592.相反,由于ois线圈单元230-1的磁场的影响被减弱或衰减,发现在200hz至300hz范围内的增益与case1中的增益相比增加得较多(约-37db)。换句话说,由于ois线圈单元230-1的磁场的影响被减弱或衰减,因此可以获得正常的频率响应特性。593.根据本发明的实施方式,由于由ois线圈单元230-1的磁场对ois位置传感器240a的输出的影响被减少,因此可以提高ois位置传感器240a相对于磁体23a的磁场的识别率。因此,可以防止图26中所示的现象38a的发生,并且可以以高精确度和可靠性执行ois反馈操作。因此,可以确保由相机模块的手抖动校正的可靠性。594.对图23至图27的描述可以在修改或未修改的情况下应用于线圈单元230-2至230-4、ois位置传感器240b和240c、以及磁体23b至23d。595.图28是根据实施方式的相机模块1010的立体图。图29是图28中所示的相机模块1010的分解立体图。图30是移除了盖构件1300的图28中所示的相机模块的组装立体图。图31是图29中所示的af操作单元1100的分解立体图。图32是图31中所示的线圈架1110、感测磁体1180、平衡磁体1185、第一线圈1120、电路板1190、第一位置传感器1170和电容器1195的立体图。图33是线圈架1110、壳体1140和电路板1190的立体图。图34是壳体1140、线圈架1110、下弹性构件1160、磁体1130和电路板1190的底部立体图。596.参照图28至图34,相机模块1010可以包括af操作单元1100和图像传感器单元1350。597.相机模块1010可以包括盖构件1300、透镜模块1400和基座1210中的至少一者。盖构件1300和基座1210可以限定外壳。598.af操作单元1100可以联接至透镜模块1400,以便使透镜模块1400沿光轴oa的方向或沿平行于光轴oa的方向移动,并且可以执行相机模块1010的自动对焦功能。599.图像传感器单元1350可以包括图像传感器1810。图像传感器单元1350可以使图像传感器1810沿垂直于光轴的方向移动,并且可以使图像传感器1810绕光轴倾斜或旋转。可以使用图像传感器单元1350执行相机模块1010的手抖动校正。600.例如,图像传感器1810可以绕x轴、y轴和z轴中的至少一者进行旋转。601.例如,图像传感器1810可以沿x轴方向、y轴方向和z轴方向中的至少一个方向移动。602.例如,图像传感器1810可以相对于x轴、y轴和z轴中的至少一者倾斜。603.af操作单元1100可以替代性地被称为“透镜移动单元”或“透镜移动装置”。替代性地,af操作单元1100可以替代性地被称为“第一致动器”或“af驱动单元”。604.对于ois(光学图像稳定)操作,可以由图像传感器单元1350使图像传感器1810而不是使透镜模块1400沿垂直于光轴的方向移动。605.图像传感器单元1350可以替代性地被称为“图像传感器移动单元”、“图像传感器移位单元”、“传感器移动单元”或“传感器移位单元”。替代性地,图像传感器单元1350可以替代性地被称为“第二致动器”或“ois驱动单元”。606.参照图31,af操作单元1100可以包括线圈架1110、第一线圈1120、磁体1130和壳体1140。607.af操作单元1100还可以包括上弹性构件1150和下弹性构件1160。608.对于af反馈操作,af操作单元1100可以包括第一位置传感器1170、电路板1190和感测磁体1180。af操作单元1100还可以包括平衡磁体1185和电容器1195中的至少一者。609.线圈架1110可以设置在壳体1140中,并且可以通过第一线圈1120与磁体1130之间的电磁作用沿光轴oa的方向或沿第一方向(例如,沿z轴方向)移动。610.线圈架1110可以具有孔,透镜模块1400联接或安装至该孔。例如,线圈架1110中的孔可以是沿光轴方向穿过线圈架1110形成的通孔,并且可以具有圆形形状、椭圆形形状或多边形形状,但不限于此。611.透镜模块1400可以包括至少一个透镜和/或透镜镜筒。612.例如,透镜模块1400可以包括一个或更多个透镜和接纳所述一个或更多个透镜的透镜镜筒。然而,透镜模块的构造并不限于透镜镜筒。透镜模块可以具有任何构造,只要该构造能够支承一个或更多个透镜即可。613.例如,透镜模块1400可以例如与线圈架1110螺纹接合。替代性地,透镜模块1400可以经由粘合剂(未示出)联接至线圈架1110。已经穿过透镜模块1400的光可以通过滤光器1610辐射至图像传感器1810。614.线圈架1110可以包括形成在其外表面上的突起1111。615.例如,尽管突起1111可以沿与垂直于光轴oa的线平行的方向突出,但本公开内容不限于此。616.线圈架1110的突起1111可以对应于壳体1140中的凹槽部分1025a,并且可以配装或设置在壳体1140中的凹槽部分1025a中,以便抑制或防止线圈架1110绕光轴旋转超出预定范围。此外,突起1111可以用作止挡部,该止挡部构造成响应于外部冲击等使线圈架1110仅沿光轴方向(例如,沿从上弹性构件1150朝向下弹性构件1160的方向)在预定范围内移动。617.线圈架1110可以具有形成在其上表面中以便避免与上弹性构件1150的第一连接器1153发生空间干涉的第一避让凹槽1112a。此外,线圈架1110可以具有形成在其下表面中以便避免与下弹性构件1160的第二框架连接器1163发生空间干涉的第二避让凹槽1112b。618.线圈架1110可以包括第一联接器1116a,第一联接器1116a构造成联接或固定至上弹性构件1150。例如,尽管线圈架1110的第一联接器1116a可以构造成具有平坦形状,但本公开内容不限于此。在另一实施方式中,第一联接器1116a可以采取突起或凹槽的形式。619.线圈架1110可以包括第二联接器1116b,第二联接器1116b构造成联接和固定至下层弹性构件1160。例如,尽管第二联接器1116b可以构造成具有平坦形状,但本公开内容不限于此。在另一实施方式中,第二联接器1116b可以采取突起或凹槽的形式。620.参照图32,线圈架1110的外表面可以具有形成在其中的凹槽,第一线圈1120坐置、配装或设置在该凹槽中。线圈架1110中的凹槽可以具有与第一线圈1120的形状对应的形状,即,闭合曲线形状(例如,环形形状)。621.线圈架1110可以在其中设置有第一坐置凹槽,感测磁体1180坐置、配装、固定或设置在该第一坐置凹槽中。此外,线圈架1110的外表面可以设置有第二坐置凹槽,平衡磁体1185坐置、配装、固定或设置在该第二坐置凹槽中。例如,线圈架1110中的第一坐置凹槽和第二坐置凹槽可以形成在线圈架1110的面向彼此的外表面中。622.第一线圈1120可以设置在线圈架1110处或与线圈架1110联接。例如,第一线圈1120可以设置在线圈架1110的外表面处。623.例如,尽管第一线圈1120可以沿绕光轴oa的旋转方向环绕线圈架1110的外表面,但本公开内容不限于此。624.尽管第一线圈1120可以直接绕线圈架1110的外表面卷绕,但本公开内容不限于此。在另一实施方式中,第一线圈1120可以实施为线圈环或角形环,并且可以绕线圈架1110设置。625.可以向第一线圈1120供应电力或驱动信号。626.供应至第一线圈1120的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量两者的信号,并且可以是电压型或电流型。627.当向第一线圈1120供应驱动信号(例如,驱动电流)时,可以通过第一线圈1120与磁体1130之间的电磁作用产生电磁力,并且线圈架1110可以通过所产生的电磁力沿光轴方向oa移动。628.线圈架1110可以从af操作单元的初始位置向上或向下移动,这被称为af操作单元的双向驱动。替代性地,线圈架1110可以从af操作单元的初始位置向上(或向前)移动,这被称为af操作单元的单向驱动。629.在af操作单元的初始位置处,第一线圈1120可以在平行于与光轴oa垂直并延伸穿过光轴的线的方向上与设置在壳体1140处的磁体1130对应或重叠。630.例如,af操作单元可以包括线圈架1110和联接至线圈架1110的部件(例如,第一线圈1120、感测磁体1180和平衡磁体1185)。af操作单元还可以包括透镜模块1400。631.af操作单元的初始位置可以是在没有电力施加至线圈120的状态下af操作单元的初始位置,或者是由于上弹性构件150和下弹性构件160仅因af操作单元的重量弹性地变形而导致af操作单元作所处的位置。632.另外,线圈架110的初始位置可以是当重力沿从线圈架110至基座210的方向作用时或当重力沿从基座210至线圈架110的方向作用时af操作单元所处的位置。633.感测磁体180可以提供由第一位置传感器1170检测的磁场,并且平衡磁体1185可以用于抵消感测磁体1180的磁场的影响并相对于感测磁体1180建立重量平衡。634.感测磁体1180可以替代性地被称为“感测磁体”。635.感测磁体1180可以设置在线圈架1110处,或者可以联接至线圈架1110。636.感测磁体1180可以设置成面向第一位置传感器1170。637.平衡磁体1185可以设置在线圈架1110处,或者可以联接至线圈架1110。例如,平衡磁体1185可以设置成与感测磁体1180对置。638.尽管感测磁体1180和平衡磁体1185中的每一者都可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,感测磁体1180和平衡磁体1185中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。639.感测磁体1180可以与线圈架1110一起沿光轴方向移动,并且第一位置传感器1170可以检测沿光轴方向移动的感测磁体1180的磁场的强度或磁力,并且可以输出与检测结果对应的输出信号。640.例如,根据线圈架1110在光轴方向上的位移,由第一位置传感器1170检测到的磁场的强度或磁力可以变化。因此,第一位置传感器1170可以输出与检测到的磁场的强度成比例的输出信号,并且可以使用来自第一位置传感器1170的输出信号来检测线圈架1110在光轴方向上的位移。641.壳体1140在其中容纳线圈架1110,并且支承磁体1130、第一位置传感器1170和电路板1190。642.参照图31、图33和图34,壳体1140可以构造成整体上具有中空的柱体。例如,壳体1140可以具有多边形(例如,矩形或八边形)或圆形的孔,并且壳体1140中的孔可以是沿光轴方向穿过壳体1140形成的通孔。643.壳体1140可以包括侧部部分和拐角,该侧部部分对应于或面向盖构件1300的侧板1302,该拐角对应于或面向盖构件1300的拐角。644.为了防止与盖构件1300的上板1301的内表面直接碰撞,壳体1140可以包括设置在其上部部分、上表面或上端部处的止挡部1145。645.为了防止壳体1140的下表面与图像传感器1350的电路板1800碰撞,壳体1140还可以包括从其下表面突出的止挡部1147。此处,止挡部1145和1147可以替代性地被称为“凸台”或“突出部”。646.参照图31,壳体1140可以具有构造成在其中接纳电路板1190的安装凹槽(或坐置凹槽)1014a。安装凹槽1014a可以具有与电路板1190的形状对应的形状。647.参照图33,壳体1140可以具有开口141,电路板1190的端子构件1095的端子k1至k6通过开口141暴露出。开口1141可以形成在壳体1140的侧部部分中。648.壳体1140的上部部分、上端部或上表面可以设置有至少一个第一联接器,所述至少一个第一联接器将联接至上弹性构件1150的第一外框架1152。649.壳体1140的下部部分、下端部或下表面可以设置有第二联接器,该第二联接器将联接并固定至下弹性构件1160的第二外框架1162。例如,壳体1140的第一联接器和第二联接器中的每一者可以具有突出部、凹槽或平坦表面的形状。650.磁体1130可以设置在壳体1140处。例如,磁体1130可以设置在壳体1140的侧部部分处。磁体1130可以是用于af操作的af操作磁体。651.例如,尽管磁体1130可以包括设置在彼此相对定位的两个侧部部分处的第一磁体和第二磁体,但本公开内容不限于此。在另一实施方式中,磁体1130可以设置在壳体1140的拐角处。652.磁体1130可以包括两个或更多个磁体。653.在af操作单元的初始位置处,第一磁体1130可以在壳体1140处设置成在平行于与光轴oa垂直并延伸穿过光轴oa的线的方向上与第一线圈1120部分地重叠。654.尽管第一磁体1130-1和第二磁体1130-2中的每一者可以是单极磁化磁体,但本公开内容不限于此。在另一实施方式中,第一磁体1130-1和第二磁体1130-2中的每一者可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。655.电路板1190可以设置在壳体1140处,并且第一位置传感器1170可以设置在电路板1190处或安装至电路板1190。例如,电路板1190可以设置在壳体1140中的安装凹槽1014a中,并且电路板1190的端子可以通过壳体1140中的开口1141暴露于壳体1140的外部。656.电路板1190可以包括端子构件(或端子单元)1095,端子构件(或端子单元)1095包括多个端子k1至k6,其导电地连接至外部端子或外部设备,并且多个端子k1至k6可以导电地连接至第一位置传感器1170。657.第一位置传感器1170可以设置在电路板1190的第一表面上,并且多个端子k1至k6可以设置在电路板1190的第二表面上。此处,电路板1190的第二表面可以是与电路板1190的第一表面相反的表面。例如,电路板1190的第一表面可以是电路板1190的面向线圈架1110或感测磁体1180的表面。658.例如,电路板1190可以实施为印刷电路板或fpcb。659.电路板1190可以包括用于将第一端子k1至第六端子k6导电地连接字第一位置传感器1170的电路图案或布线(未示出)。660.第一位置传感器1170可以对安装在线圈架1110上的感测磁体1180在线圈架1110运动期间的磁场或磁场的强度进行检测,并且可以输出与检测结果对应的输出信号。661.第一位置传感器1170可以仅实施为一个霍尔传感器。第一位置传感器1170可以包括两个输入端子和两个输出端子,驱动信号或电力供应至所述两个输入端子,感应电压(或输出电压)通过所述两个输出端子输出。662.例如,驱动信号可以通过电路板1190的第一端子k1和第二端子k2供应至第一位置传感器1170,并且第一位置传感器1170的输出可以通过第三端子k3和第四端子k4输出至外部。663.电路板1190的第五端子k5和第六端子k6可以导电地连接至上弹性构件1150和下弹性构件1160中的至少一者,以便将驱动信号供应至第一线圈1120。664.在另一实施方式中,第一位置传感器1170可以实施为包括霍尔传感器的驱动ic。例如,第一位置传感器1170可以包括霍尔传感器和驱动器。此处,第一位置传感器1170可以包括:第一端子至第四端子,借助于所述第一端子至第四端子,通过使用协议比方说例如i2c通信的数据通信将数据传输至外部以及从外部接收数据;以及第五端子和第六端子,通过第五端子和第六端子,将驱动信号直接供应至第一线圈1120。第一位置传感器1170的第一端子至第四端子可以导电地连接至电路板1190的第一端子k1至第四端子k4。第一位置传感器1170的第五端子和第六端子可以通过上弹性构件1150和下弹性构件1160中的至少一者导电地连接至第一线圈1120,以便将驱动信号供应至第一线圈1120。665.电容器1195可以设置或安装在电路板1190的第一表面上。电容器1195可以构造成具有芯片形状。此处,芯片可以包括:第一端子,该第一端子与电容器1195的一个端部对应;以及第二端子,该第二端子与电容器1195的另一个端部对应。电容器1195可以替代性地被称为“电容元件”或“蓄电器”。666.电容器1195可以与电路板1190的第一端子k1和第二端子k2导电地并联连接,通过第一端子k1和第二端子k2从外部向位置传感器1170供应电力(或驱动信号)。替代性地,电容器1195可以与第一位置传感器1170的端子导电地并联连接,第一位置传感器1170的端子导电地连接至电路板1190的第一端子k1和第二端子k2。667.由于电容器1195与电路板1190的第一端子k1和第二端子k2导电地并联连接,因此电容器1195能够用作平滑电路,以消除从外部供应至第一位置传感器1170的电力信号gnd和vdd中所包括的波纹分量,并且因此能够向第一位置传感器1170供应稳定且一致的电力信号。668.上弹性构件1150可以联接至线圈架1110的上部部分、上端部或上表面以及壳体1140的上部部分、上端部或上表面,并且下弹性构件1160可以联接至线圈架1110的下部部分、下端部或下表面或者壳体1140的上部部分、上端部或上表面。669.上弹性构件1150和下弹性构件1160可以相对于壳体1140弹性地支承线圈架1110。670.尽管上弹性构件1150和下弹性构件1160中的每一者在图31中实施为单个单元或单个结构,但本公开内容不限于此。671.在另一实施方式中,上弹性构件和下弹性构件中的至少一者可以包括彼此在导电方面隔离或间隔开的多个弹性单元或弹簧。672.上弹性构件1150还可以包括联接或固定至线圈架1110的上部部分、上表面或上端部的第一内框架1151、联接或固定至壳体1140的上部部分、上表面或上端部的第二内框架152、以及将第一内框架1151连接至第一外框架1152的第一框架连接器1153。673.下弹性构件1160可以包括联接或固定至线圈架1110的下部部分、下表面或下端部的第二内框架1161、联接或固定至壳体1140的下部部分、下表面或下端部的第二外框架1162-1至1162-3、以及将第二内框架1161连接至第二外框架1162-1至1162-3的第二框架连接器1163。674.上弹性构件150的第一框架连接器1153和下弹性构件160的第二框架连接器1163中的每一者可以弯折或弯曲(或者可以形成为曲线)至少一次,以便限定预定图案。675.上弹性构件1150和下弹性构件1160中的每一者可以由导电材料制成。676.参照图31和图32,电路板1190的第一表面可以设置有两个焊盘1005a和1005b,所述两个焊盘1005a和1005b导电地连接至电路板1190的第五端子k5和第六端子k6。上弹性构件1150可以包括第一接合部分1004a,第一接合部分1004a联接或导电地连接至第一焊盘1005a,并且下弹性构件1160可以包括第二接合部分1004b,第二接合部分1004b导电地连接至第二焊盘1005b。第一线圈1120可以在其一个端部处联接至上弹性构件1150并且在另一个端部处联接至下弹性构件1160。677.在另一实施方式中,上弹性构件1150或下弹性构件1160可以包括两个弹性构件,并且这两个弹性构件中的每个弹性构件可以联接或导电地连接至电路板1190的第一焊盘和第二焊盘中的对应的一者。第一线圈1120可以导电地连接至这两个弹性构件。678.图35是图29中所示的图像传感器单元1350的立体图。图36是图35中所示的图像传感器单元1350的分解立体图。图37是第一电路板1800和壳体1450的立体图。图38是图36中所示的第一电路板1800、壳体1450和磁体1023的立体图。图39a是第二电路板1900、第二线圈1230、第二位置传感器1240、图像传感器1810、支承构件1220和保持器1270的分解立体图。图39b是图39a中所示的第三电路板1250、第二线圈1230和第二位置传感器1240的平面图。图40是图36中所示的第二电路板1900、图像传感器1810、支承构件1220、保持器1270和连接弹性构件1280的分解立体图。图41是图35中所示的图像传感器单元1350的、从中移除了底盖1219的底视图。图42是图42中所示的连接弹性构件1280的局部放大图。图43是图示了连接弹性构件1280的连接弹簧1001a、1002a、1003a和1004a的视图。图44a是图28中所示的相机模块1010的沿着线a-b截取的横截面图。图44b是图28中所示的相机模块1010的沿着线c-d截取的横截面图。图45是图28中所示的相机模块1010的沿着线i-j截取的横截面图。图46是图35中所示的图像传感器单元1350的沿着线e-f截取的横截面图。图47是图35中所示的图像传感器350的沿着线g-h截取的横截面图。图52是移除了底盖1219且被剖开的相机模块1010的立体图。679.参照图35至图48,图像传感器单元1350可以包括第一电路板1800、磁体1023、第二电路板1900、第二线圈1230、图像传感器1810、连接弹性构件1280和支承构件1220。680.图像传感器单元1350还可以包括壳体1450,壳体1450构造成接纳第一电路板1800的至少一部分。681.第一电路板1800可以用于从外部向图像传感器单元1350供应信号或从图像传感器单元1350向外部输出信号。682.参照图36和图37,第一电路板可以包括:第一区域1801,第一区域1801对应于af操作单元1100;第二区域1802,在第二区域1802处设置有连接器1840;以及第三区域1803,第三区域1803将第一区域1801连接至第二区域1802。连接器1840可以导电地连接至第二电路板1800的第二区域1802,并且可以包括构造成导电地连接至外部设备的端口。683.尽管第二电路板1800的第一区域1801和第二区域1802中的每一者可以包括柔性基底和刚性基底,并且第三区域803可以包括柔性基底,但本公开内容不限于此。在另一实施方式中,电路板1800的第一区域1801至第三区域1803中的至少一者可以包括刚性基底和柔性基底中的至少一者。684.第一电路板1800可以包括孔1800a,孔1800a对应于af操作单元1100的线圈架1110中的孔、透镜模块1400和/或图像传感器1810。例如,第一电路板1800中的孔1800a可以形成在第一区域1801中。685.参照图44a,透镜模块1400的至少一部分可以延伸穿过第一电路板1800中的孔1800a,并且可以定位在第一电路板1800的第二表面1044b下方。686.透镜模块1400可以设置在第二电路板1900上。例如,透镜模块1400可以定位在第三电路板1250上。例如,透镜模块1400可以定位在第三电路板1250中的孔1501上方。687.例如,透镜模块1400的透镜或透镜镜筒的下部部分、下端部或下表面可以延伸穿过第一电路板1800中的孔1800a,并且可以定位在第一电路板1800的第二表面1044b下方。688.此外,透镜模块1400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在第二电路板1900(或第三电路板1250)的第一表面(例如,上表面)1051a上。689.此外,透镜模块1400的透镜或透镜镜筒的下部部分、下端部或下表面可以定位在第三电路板1250的孔1501上方。690.尽管第一电路板1800可以构造成在从上面看时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,第一电路板1800可以构造成具有圆形形状等。此外,尽管第一电路板1800中的孔1800a可以构造成在从上面看时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,孔1800a可以构造成具有圆形形状等。691.第一电路板1800可以包括与支承构件1220对应的至少一个焊盘。例如,第一电路板1800的至少一个焊盘可以包括多个焊盘1800b。此处,焊盘1800b可以替代性地被称为“引线图案”、“引线构件“或“孔”。692.第一电路板1800可以在其中具有与支承构件1220对应的至少一个孔,并且所述孔可以穿过第一电路板1800形成。例如,第一电路板1800可以在其中具有与多个支承构件对应的多个通孔。693.例如,多个焊盘1800b中的每个焊盘可以在其中具有孔,该孔在光轴oa的方向上穿过第一电路板1800形成。多个焊盘1800b中的每个焊盘可以环绕该孔,并且还可以包括引线图案或导电层。694.支承构件1220可以延伸穿过焊盘1800b中的孔,并且可以焊接至焊盘1800b,以便导电地连接至设置在焊盘1800b中的孔周围的引线图案。695.例如,多个焊盘1800b可以以规则的间隔彼此间隔开,以便环绕第一电路板1800中的孔1800a。例如,多个焊盘1800b可以设置在第一电路板1800中的孔1800a与第一电路板1800的侧部之间的区域中。696.第一电路板1800可以具有至少一个联接孔1800c,所述至少一个联接孔1800c构造成联接至壳体1450的联接突出部1045b。尽管联接孔1800c可以是沿光轴方向穿过第一电路板1800形成的通孔,但本公开内容不限于此。在另一实施方式中,联接孔1800c可以采取凹槽的形式。697.例如,尽管联接孔1800c可以形成在第一电路板1800的在对角线方向上彼此相对的拐角中,但本公开内容不限于此。在另一实施方式中,联接孔可以定位成与电路板1800的侧部相邻或者定位在电路板的侧部与孔1800a之间。698.第一电路板1800可以包括至少一个端子,例如,多个端子1080a。699.多个端子1080a可以形成在第一电路板1800的第一表面(例如,上表面)44a上。例如,多个端子1080a可以设置在第一电路板1800的与第一电路板1800的一个拐角相邻的一个侧部处。700.多个端子1080a中的每个端子可以经由导电粘合构件或焊料导电地连接至电路板1190的端子k1至k6中的对应的一个端子。701.例如,第一电路板1800可以包括端子构件1085,端子构件1085上形成有多个端子1080a。端子构件1085可以从第一电路板1800的一个侧部沿垂直于光轴的方向突出。702.图像传感器单元1350还可以包括壳体1450,第一电路板1800设置、坐置或接纳在壳体1450中。703.壳体1450可以在其中接纳第一电路板1800的至少一部分(例如,第一区域)。壳体1450可以在其中接纳磁体1023,并且可以替代性地被称为“磁体保持器”。704.壳体1450可以设置在af操作单元1100的壳体1140下方,并且可以联接至图像传感器单元1350的壳体1140。例如,壳体1450的上部部分、上端部或上表面可以经由粘合构件或联接结构联接至af操作单元1100的壳体1140的下部部分、下端部或下表面。705.此处,联接结构可以包括设置在af操作单元1100的壳体1140的下部部分、下端部或下表面处的第一联接器和设置在图像传感器单元1350的壳体1450的上部部分、上端部或上表面处的第二联接器。第一联接器可以构造成具有突出部形状或凹槽(或孔)形状,并且第二联接器可以构造成具有凹槽(或孔)形状或突出部形状。706.在另一实施方式中,af操作单元1100的壳体1140可以经由粘合构件联接至第一电路板1800。707.壳体1450可以设置在第一电路板1800下方。例如,af操作单元1100可以设置在第一电路板1800的上方,并且壳体1450可以设置在第一电路板1800的下方。708.壳体1450可以具有与第一电路板1800的第一区域1801对应或一致的形状。尽管壳体1450可以构造成当从上方观察时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,壳体1450可以构造成具有圆形形状或椭圆形形状。709.壳体1450在其中可以具有孔1450a。壳体1450中的孔1450a的至少一部分可以与第一电路板1800中的孔1800a对应或重叠。710.尽管壳体1450中的孔1450a可以构造成当从上方观察时具有多边形(例如,四边形形状或八边形形状)、圆形形状或十字形形状,但本公开内容不限于此。壳体1450中的孔1450a可以是沿光轴方向穿过壳体1450形成的通孔。711.例如,壳体1450可以包括构造成支承第一电路板1800的至少一部分(例如,第一区域1801)的本体1042、从本体1042沿光轴oa的方向突出的突起1043以及穿过本体1042形成的孔1450a。712.壳体1450可以包括从本体1042的上表面突出的至少一个联接突出部1045b。例如,联接突出部1045b可以从本体1044的上表面沿朝向第一电路板1800的第二表面(例如,下表面)1044b的方向突出。713.壳体1450可以包括与多个焊盘1800b对应的避让区域1041。避让区域1041可以形成在与支承构件1220对应的位置处,以避免壳体1450与支承构件1220之间发生空间干涉。714.壳体1450的突起1043可以包括构造成将第一电路板1800的第一区域1801的一部分暴露于外部的第一开口1046以及构造成将形成在端子构件1085处的端子1080a暴露于外部的第二开口1047。715.例如,壳体1450中的第二开口1047可以在光轴oa方向上形成在与af操作单元1100的壳体1140中的开口1141对应的位置处。716.参照图28和图37,第一电路板1800可以包括与af操作单元1100的电路板1190的端子k1至k6对应的端子1080a。717.第一电路板1800的端子1080a中的每个端子1080a可以经由焊料或导电构件联接至af操作单元1100的电路板1190的端子k1至k6中的对应的一个端子。718.第一电路板1800的端子1080a中的每个端子1080a可以导电地连接至af操作单元1100的电路板1190的端子k1至k6中的对应的一个端子。驱动信号或电力可以通过第一电路板1800供应至第一位置传感器1170,并且第一位置传感器1170的输出可以输出至第一电路板1800。此外,驱动信号或电力可以通过第一电路板1800供应至第一线圈1120。719.参照图28,第一电路板1800可以包括设置在第二区域1802中的连接器1840。例如,连接器1840可以设置在第一电路板1800的第二区域1802的一个表面上(例如,上表面或下表面)。720.壳体1450可以包括坐置部分1008a,磁体1023接纳、设置或坐置在坐置部分1008a中。坐置部分1008a可以设置在壳体1450的本体1042处。721.例如,坐置部分1008a可以形成在壳体1450的拐角中。例如,坐置部分1008a可以构造成具有从本体1042的下表面凹陷的凹槽的形式,并且可以具有与磁体1023对应的形状。例如,尽管壳体1450可以包括分别形成在壳体1450的四个拐角中的坐置部分1008a,但本公开内容不限于此。在另一实施方式中,壳体1450可以包括与磁体1023的数目对应的多个坐置部分。722.磁体1023可以设置在壳体1450处。例如,尽管磁体1023可以设置在壳体1140的拐角处,但本公开内容不限于此。在另一实施方式中,磁体1023可以设置在壳体1450的侧部部分处。723.磁体1023可以用于供应磁场,该磁场与第二线圈1230相互作用,以出于手抖动校正的目的执行ois(光学图像稳定)。724.例如,磁体1023可以包括多个磁体1023a至1023d。磁体1023a至1023d中的每个磁体可以设置在壳体1450的拐角中的对应的一个拐角处。725.尽管磁体1023a至1023d中的每个磁体可以是具有一个n极和一个s极的单极磁化磁体,但本公开内容不限于此。在另一实施方式中,磁体1023a至1023d中的每个磁体可以是具有两个n极和两个s极的双极磁化磁体,或者是四极磁化磁体。726.例如,四个磁体1023a至1023d中的每个磁体可以设置在壳体1450的四个拐角中的对应的一个拐角处。例如,尽管设置在壳体1450的两个相邻拐角处的两个磁体(例如,1023a和1023b)可以定向成彼此垂直,并且设置在壳体1450的在对角线方向上面向彼此的两个拐角处的两个磁体(例如,1023a和1023c;1023b和1023d)可以定向成彼此平行,但本公开内容不限于此。727.例如,磁体1023a至1023d的内部部分可以具有相同的极性。此外,磁体1023a至1023d的外部部分可以具有相同的极性。728.例如,磁体1023a至1023d中的每个磁体的内部部分可以被磁化为n极,并且磁体1023a至1023d中的每个磁体的外部部分可以被磁化为s极。在改型中,磁体1023a至1023d中的每个磁体的内部部分可以被磁化为s极,并且磁体1023a至1023d中的每个磁体的外部部分可以被磁化为n极。729.参照图36至图40,第二电路板可以设置在第一电路板1800下方。第二电路板1900可以包括第三电路板1250和第四电路板1260。第四电路板1260可以替代性地被称为“连接板”。730.例如,第三电路板1250可以设置在第一电路板1800下方。731.第三电路板1250可以在其中具有孔1501,孔1501对应或面向线圈架1110中的孔、壳体1450中的孔和/或第一电路板1800中的孔1800a。732.例如,第三电路板1250中的孔1501可以是沿光轴方向穿过第三电路板1250形成的通孔,并且可以定位在第三电路板1250的中央处。733.尽管第三电路板1250的形状、例如外周缘形状当从上方观察时可以是与基座1210的上表面一致或对应的形状比如四边形形状,但本公开内容不限于此。734.此外,尽管第三电路板1250中的孔1501可以具有多边形形状、例如四边形形状、圆形形状或椭圆形形状,但本公开内容不限于此。735.第三电路板1250可以在其中具有与第一电路板1800的多个焊盘1800b对应的多个孔1250a。尽管第三电路板1250中的多个孔1250a可以是沿光轴oa的方向穿过第三电路板1250形成的通孔,但本公开内容不限于此。在另一实施方式中,第三电路板1250中的多个孔可以是避让凹槽或避让部分,所述避让凹槽或避让部分构造成避免与支承构件1220发生空间干涉。736.例如,第三电路板1250中的多个孔1250a可以布置成环绕第三电路板1250中的孔1501,并以规则的间隔彼此隔开。例如,多个孔1250a可以形成在第三电路板1250的孔1501中和第三电路板1250的侧部中。737.第三电路板1250可以具有至少一个联接孔1025a,所述至少一个联接孔1025a构造成联接至保持器1270的突出部1273。尽管第三电路板1250中的联接孔1025a可以是沿光轴方向穿过第三电路板1250形成的通孔,但本公开内容不限于此。在另一实施方式中,联接孔1025a可以采取凹槽的形式。738.例如,尽管联接孔1025a可以形成在第三电路板1250的拐角中的至少一个拐角中,但本公开内容不限于此。联接孔1025a也可以定位成与第三电路板1250的侧部相邻或者定位在第三电路板1250的侧部与孔1501之间。739.参照图40,第三电路板1250可以包括多个端子1251。例如,多个端子1251可以在第三电路板1250的第二表面1051b(例如,下表面)上设置成彼此间隔开。第二表面1051b可以是与第一表面1051a相反的表面。端子1251的数目不限于图40中所示的数目,并且可以大于或小于图40中所示的数目。740.例如,多个端子1251可以设置在第三电路板1250中的孔1501与第三电路板1250的一个侧部之间的区域中。例如,多个端子1251可以设置成距第三电路板1250中的孔1501比距多个孔1250a更近。741.第三电路板1250可以包括构造成导电地连接至第二线圈1230的焊盘1009a至1009h。此处,焊盘可以替代性地被称为“端子”或“接合部分”。第三电路板1250的焊盘1009a至1009a可以导电地连接至第三电路板1250的多个端子1251。742.第三电路板1250可以是印刷电路板或柔性印刷电路板(fpcb)。743.第二线圈1230可以设置或安装在第三电路板1250的第一表面(例如,上表面)1051a上。744.第二线圈1230可以设置在壳体1450下方。第二线圈1230可以设置在磁体1023下方。745.例如,第二线圈1230可以设置在电路板1250上,以便在光轴oa的方向上与设置在壳体1450处的磁体1023对应、面向或重叠。746.例如,第二线圈1230可以包括多个线圈单元1230-1至1230-4。例如,第二线圈1230可以包括四个线圈单元。747.多个线圈单元1230-1至1230-4中的每个线圈单元可以在光轴oa的方向上与设置在壳体1450处的磁体1023a至1023d中的对应的一个磁体面向或重叠。748.尽管线圈单元中的每个线圈单元可以呈具有闭合曲线形状或环形形状的线圈块的形式,但本公开内容不限于此。例如,线圈单元中的每个线圈单元可以包括fp(精细图案)线圈。在另一实施方式中,线圈单元可以形成在除了第三电路板1250之外的另外的电路构件处。在另一实施方式中,线圈单元可以直接形成在电路板1250中。749.例如,四个线圈单元1230-1至1230-4可以设置或形成在四边形电路板1250的拐角或拐角区域处。750.第二线圈1230可以导电地连接至第三电路板1250,并且因此可以通过第三电路板1250将电力或驱动信号供应至第二线圈1230。供应至第二线圈1230的电力或驱动信号可以是dc信号、ac信号或包含dc分量和ac分量两者的信号,并且可以是电压型或电流型。751.此处,电流可以被独立地施加至四个线圈单元中的至少三个线圈单元。752.在第一实施方式中,可以通过三个通道控制第二线圈1230。753.例如,在第一线圈单元至第四线圈单元中,只有第一线圈单元至第三线圈单元可以彼此在导电方面隔离,并且第四线圈单元可以串联地导电连接至第一线圈单元至第三线圈单元中的一者。此处,可以从第二线圈1230引出三对引线,即,总共六根引线。754.在第二实施方式中,可以通过四个单独的通道控制第二线圈1230。此处,四个线圈单元可以彼此在导电方面隔离。可以选择性地向线圈单元中的每个线圈单元施加正向电流和反向电流中的一者。此处,可以从第二线圈1230中引出四对引线,即,总共八根引线。755.例如,在对角线方向上面向彼此的两个线圈单元1230-1和1230-3可以沿在第一轴向方向(例如,沿y轴方向)延伸或定向,并且在对角线方向上面向彼此的另外两个线圈单元1230-2和1230-4可以沿第二轴向方向(例如,沿x轴方向)延伸或定向。此处,第一轴向方向可以与第二轴向方向垂直。756.第一线圈单元1230-1的长边和第三线圈单元1230-3的长边可以设置成彼此平行。第二线圈单元1230-2的长边和第四线圈单元1230-4的长边可以设置成彼此平行。第一线圈单元1230-1的长边和第二线圈单元1230-2的长边可以不设置成彼此平行。此处,第一线圈单元1230-1的长边和第二线圈单元1230-2的长边可以设置成使得从其延伸的假想线彼此相交。例如,第一线圈单元1230-1定向所沿的方向和第二线圈单元1230-2定向所沿的方向可以彼此垂直。757.在另一实施方式中,四个线圈单元中的至少一个线圈单元可以与其余线圈单元被分开地驱动。在另一实施方式中,四个线圈单元可以被单独地驱动。758.例如,第一线圈单元1230-1可以在其一个端部处连接至第一焊盘9a并且在其另一个端部处连接至第二焊盘9b。可以将第一驱动信号供应至第一焊盘1009a和第二焊盘1009b,以便激活第一线圈单元1230-1。759.第三线圈单元1230-3可以在其一个端部处连接至第三焊盘1009c并且在其另一个端部处连接至第四焊盘1009d。可以将第二驱动信号供应至第三焊盘1009c和第四焊盘和1009d,以便激活第三线圈单元1230-3。760.第二线圈单元1230-2可以在其一个端部处连接至第五焊盘1009e并且在其另一个端部处连接至第六焊盘1009f。可以将第三驱动信号供应至第五焊盘1009e和第六焊盘1009f,以便激活第二线圈单元1230-2。761.第四线圈单元1230-4可以在其一个端部处连接至第七焊盘1009g并且在其另一个端部处连接至第八焊盘1009h。可以将第四驱动信号供应至第七焊盘1009g和第八焊盘1009h,以便激活第四线圈单元1230-4。762.在实施方式中,在对角线方向上面向彼此的两个线圈单元(例如,1230-3和1230-4)可以彼此直接串联连接,并且可以由单个驱动信号激活。同时,在对角线方向上面向彼此的两个线圈单元(例如,1230-1和1230-2),可以彼此在导电方面隔离,并且可以由不同的驱动信号单独地激活。763.在另一实施方式中,四个线圈单元1230-1至1230-4可以彼此在导电方面隔离,并且可以由不同的各个驱动信号单独地激活。764.借助磁体1023a至1023d与被施加驱动信号的线圈单元1230-1至1230-4之间的相互作用,包括图像传感器1810的ois可移动单元可以沿第二方向和/或第三方向、例如沿x轴方向和/或y轴方向移动,从而执行手抖动校正。关于ois可移动单元的描述将随后给出。765.图像传感器单元1350还可以包括用于反馈ois操作的第二位置传感器1240。766.第二位置传感器1240可以设置、联接或安装至第三电路板1250的第一表面(例如,上表面)1051a。第二位置传感器1240可以检测ois可移动单元在垂直于光轴oa的方向上的位移,例如,ois可移动单元在垂直于光轴的方向上的移位或倾斜,或ois可移动单元绕光轴的旋转。767.此处,第一位置传感器1170可以替代性地被称为“af位置传感器”,并且第二位置传感器1240可以替代性地被称为“ois位置传感器”。768.第二位置传感器240可以包括一个或更多个传感器1240a、1240b和1240c。769.例如,第二位置传感器1240可以包括三个传感器1240a、1240b和1240c。770.第一传感器至第三传感器1240a、1240b和1240c中的每一者可以实施为仅一个霍尔传感器,或者可以实施为包括霍尔传感器的驱动ic。对第一位置传感器1170的描述可以在修改或未修改的情况下适用于第一传感器至第三传感器1240a、1240b和1240c。771.第一传感器至第三传感器1240a、1240b和1240c中的每一者可以导电地连接至第一电路板1250的端子262中的预定对应端子。例如,驱动信号可以相应地经由端子1251施加至第一传感器至第三传感器1240a、1240b和240c中的每一者,并且第一传感器至第三传感器中的每一者的输出信号可以输出至端子1251中的其他预定端子。772.例如,由于通过三个通道控制四个线圈单元1230-1至1230-4,因此第一传感器至第三传感器1240a、1240b和1240c中的每一者可以设置在三个线圈单元1230-1至1230-3中的对应的一者中,并且剩余的线圈单元1230-4可以不设置有传感器。773.例如,线圈单元1230-1至1230-4中的每一者可以构造成呈在其中具有开口、孔或腔的环的形式。例如,第一传感器至第三传感器1240a、1240b和1240c中的每一者可以设置在线圈单元1230-1至1230-3中的对应的一者的开口、孔或腔中。774.例如,线圈单元1230-1至1230-4和传感器1240a、1240b和1240c可以设置在与第一电路板1900的第一表面相同的平坦表面上。775.图像传感器1810在x轴和y轴方向上的所有运动以及图像传感器1810绕z轴的旋转可以由三个传感器1240a、1240b和1240c检测。776.三个传感器1240a、1240b和1240c中的一者(例如,1240a)可以检测ois可移动单元在x轴方向上的运动量和/或位移。三个传感器1240a、1240b和1240c中的另一者(例如,1240b)可以检测ois可移动单元在y轴方向上的运动量和/或位移。三个传感器1240a、1240b和1240c中的剩余一者可以检测ois可移动单元在x轴方向和/或y轴方向上的运动量和/或位移。可以使用三个传感器1240a、1240b和1240c中的两者或更多者的输出来检测ois可移动单元绕z轴的旋转运动。777.当将驱动信号(例如,驱动电流)施加至第一线圈单元1230-1和第三线圈单元1230-3,但未施加至第二线圈单元1230-2或第四线圈单元1230-4时,由第一线圈单元1230-1与第一磁体1023a之间的相互作用而产生的第一电磁力的方向和由第三线圈单元1230-3与第三磁体1023c之间的相互作用而产生的第三电磁力的方向可以是同一方向,例如,x轴方向(例如, x轴方向或-x轴方向),并且ois可移动单元可以沿x轴方向(例如,沿 x轴方向或沿-x轴方向)移动(移位)。778.例如,当将驱动信号(例如,驱动电流)施加至第二线圈单元1230-2和第四线圈单元1230-4,但未施加至第一线圈单元1230-1或第三线圈单元1230-3时,由第二线圈单元1230-2与第二磁体1023b之间的相互作用而产生的第二电磁力的方向和由第四线圈单元1230-4与第四磁体1023d之间的相互作用而产生的第四电磁力的方向可以是同一方向,例如,y轴方向(例如, y轴方向或-y轴方向),并且ois可移动单元可以沿y轴方向(例如,沿 y轴方向或沿-y轴方向)移动(移位)。779.例如,当将驱动信号被加至第一线圈单元1230-1至第四线圈单元1230-4中的每一者时,第一电磁力的方向和第三电磁力的方向是彼此相反的,第二电磁力的方向和第四电磁力的方向是彼此相反的,并且由于第一电磁力和第三电磁力导致的ois可移动单元的旋转方向与由于第二电磁力和第四电磁力导致的ois可移动单元的旋转方向相同,ois可移动单元可以绕光轴或z轴旋转或滚动。780.当通过三个通道控制第二线圈1230时,可以使用第一线圈单元1230-1和第三线圈单元1230-3或第二线圈单元1230-2和第四线圈单元1230-4使ois可移动单元滚动。781.在图39a和图39b所示的实施方式中,第二位置传感器1240可以包括三个传感器1240a、1240b和1240c。782.例如,第一传感器1240a可以设置在第一线圈单元1230-1中的电路板1250的第一表面(例如,上表面)1051a上,第三传感器1240c可以设置在第三线圈单元1230-3中的电路板1250的第一表面(例如,上表面)1051a上,并且第二传感器1240b可以设置在第二线圈单元1230-2中的电路板1250的上表面上。783.例如,尽管第一传感器1240a可以在光轴oa的方向上不与第一线圈单元1230-1重叠,第三传感器1240c可以在光轴oa的方向上不与第三线圈单元1230-3重叠,并且第二传感器1240b可以在光轴oa的方向上不与第二线圈单元1230-2重叠,但本公开内容不限于此。在另一实施方式中,传感器和线圈单元两者可以在光轴方向上至少部分地彼此重叠。784.第一传感器1240a可以在光轴方向上与磁体1023a重叠,第三传感器1240c可以在光轴方向上与磁体1023c重叠,并且第二传感器1240b可以在光轴方向上与磁体1023b重叠。785.此外,第一传感器1240a可以在垂直于光轴oa的方向上与第一线圈单元1230-1重叠,第三传感器1240c可以在垂直于光轴oa的方向上与第三线圈单元1230-3重叠,并且第二传感器1240b可以在垂直于光轴oa的方向上与第二线圈单元1230-2重叠。在另一实施方式中,传感器和线圈单元可以在垂直于光轴oa的方向上不彼此重叠。786.在另一实施方式中,第二位置传感器1240可以包括一个第一传感器和一个第二传感器。在另一实施方式中,可以省去第一传感器1240a和第三传感器1240c中的一者。787.图像传感器单元1350可以包括运动传感器1820、控制器830、存储器1512和电容器1514中的至少一者。788.运动传感器1820、控制器830、存储器1512和电容器1514可以设置或安装至第一电路板1800和第三电路板1250中的一者。789.例如,运动传感器1820和存储器1512可以设置在第一电路板1800的第二表面1044b上,并且控制器830和电容器1514可以设置在第三电路板1250的第一表面1051a上。790.运动传感器1820可以经由形成在第三电路板1250处的布线或电路图案导电地连接至控制器830。791.运动传感器1820可以输出关于由相机模块1010的运动引起的旋转角速度的信息。运动传感器1820可以实施为双轴或三轴陀螺仪传感器或角速度传感器。792.存储器1512可以根据线圈架1110在光轴方向上的位移来存储代码值,以用于af反馈操作。此外,存储器1512可以根据ois可移动单元在垂直于光轴方向的方向上的位移来存储代码值,以用于ois反馈操作。另外,存储器1512可以存储用于控制器830的操作的算法或程序。793.此外,存储器1512可以存储校正值cv。校正值cv可以替代性地被称为“误差校正值”。关于校正值cv的描述将随后给出。794.例如,尽管存储器1512可以是例如eeprom(电可擦除可编程只读存储器),但本公开内容不限于此。795.控制器830可以导电地连接至第一位置传感器1170和第二位置传感器1240。796.控制器830可以使用存储在存储器1512中的第一代码值来控制第一位置传感器1170的输出信号和供应至第一线圈1120的驱动信号,从而执行反馈自动对焦操作。797.此外,控制器830可以使用存储在存储器1512中的第二代码值来控制从第二位置传感器1240供应的输出信号和供应至第二线圈1230的驱动信号,从而执行反馈ois操作。798.尽管控制器830可以是驱动ic类型的,但本公开内容不限于此。例如,控制器830可以导电地连接至第一电路板1250的端子1251。799.第四电路板1260可以设置在第三电路板1250下方。第四电路板1260可以替代性地被称为“第三电路板”。800.尽管第四电路板1260可以构造成在从上面看时具有多边形形状(例如,四边形形状、正方形形状或矩形形状),但本公开内容不限于此。在另一实施方式中,第四电路板1260可以形成为具有圆形形状或椭圆形形状。801.例如,第四四边形电路板1260的前表面的表面积可以大于第三电路板1250中的孔1501的表面积。例如,第三电路板1250中的孔1501的下侧部可以被第四电路板1260封闭或阻挡。802.当从上面或下面看时,第四电路板1260的外表面(或外侧部)可以定位在第三电路板1250的外表面(或外侧部)与第三电路板1250的孔1501之间。803.第四电路板1260可以包括坐置区域1260a,图像传感器1810设置在该坐置区域1260a中。例如,第四电路板1260的第一表面(例如,上表面)1060a可以设置有坐置区域1260a,图像传感器1810设置或联接在该坐置区域1260a中。例如,坐置区域1260a可以设置成与第三电路板1250中的孔1501对准。804.参照图39a和图39b,第四电路板1260可以包括构造成与第三电路板1250的端子1251导电地连接的第一端子1261。第一端子1261可以替代性地被称为“第一端子部分“或“第一端子单元”。例如,第一端子1261可以包括多个第一端子。805.例如,第四电路板1260的第一端子1261可以经由焊料或导电粘合构件联接至第三电路板1250的端子1251。806.例如,第四电路板1260的第一端子1261可以设置在第四电路板1260的第一表面(例如,上表面)1060a上,并且可以与第三电路板1250在光轴方向上的端子1251对应、面向或重叠。807.参照图40,第四电路板1260可以包括第二端子1262,第二端子1262导电地连接至连接弹性构件1280。第二端子1262可以替代性地被称为“第二端子部分”或“第二端子单元”。808.例如,第四电路板1260的第二端子1262可以经由焊料1038(参见图41)或导电粘合构件联接至连接弹性构件1280。例如,第二端子1262可以包括多个第二端子。809.例如,第四电路板1260的第二端子1262可以设置在第四电路板1260的第二表面(例如,下表面)1060b上,并且可以与连接弹性构件1280连接弹簧281在光轴方向上对应、面向或重叠。第二表面1060b可以是与第一表面1060a相反的表面。810.尽管第四电路板1260可以是印刷电路板或fpcb,但本公开内容不限于此。811.保持器1270可以设置在第三电路板1250下方,以便支承第三电路板1250。例如,第三电路板1250的第二表面1051b可以与保持器1270的上表面接触。812.例如,保持器1270可以设置在第三电路板1250与连接弹性构件1280之间。813.保持器1270可以包括从其上表面朝向第三电路板1250突出的突起1276。突起1276可以用于对第三电路板1250的侧向侧表面进行支承,或者可以用作构造成允许第三电路板1250被容易地设置或坐置在保持器1270处的组装导引件。突起1276可以替代性地被称为“导引部分”或“导引突出部”。814.突起1276可以在第三电路板1250坐置在保持器1270上的状态下与第三电路板1250的外表面接触。例如,突起1276可以包括多个(例如,四个)突起,并且多个突起1276可以与第三电路板1250的所有四个外表面接触。815.例如,尽管突起1276在图39a中示出为形成在保持器1270的面向彼此的侧部的外表面上,但本公开内容不限于此。816.当从上面或下面看时,尽管保持器1270的外周缘可以具有四边形形状、例如正方形形状或长方形形状,但本公开内容不限于此。在另一实施方式中,保持器1270的外周缘可以具有圆形形状或椭圆形形状。817.保持器1270可以包括突出部1273,突出部1273对应于或面向第三电路板1250中的联接孔1025a。保持器1270上的突出部1273可以从保持器1270的第一表面1070a突出,并且可以联接至第三电路板1250中的联接孔1025a。因此,保持器1270和第三电路板1250可以彼此联接。保持器1270的第一表面1070a可以是面向第三电路板1250的第二表面1060b的表面。818.保持器1270可以具有与第四电路板1260对应的孔1071。819.尽管保持器1270中的孔1071可以具有四边形形状、例如正方形形状或矩形形状,但本公开内容不限于此。在另一实施方式中,孔1071可以具有圆形形状或椭圆形形状。820.例如,尽管保持器1270中的孔1071可以具有与第四电路板1260的形状一致或相同的形状,但本公开内容不限于此。保持器1270中的孔1071的尺寸或表面积可以大于第四电路板1260的第一表面1060a或第二表面1060b的尺寸或表面积。第四电路板1260可以设置在保持器1270中的孔1071内部。821.例如,保持器1270可以定形状成环绕第四电路板1260。822.保持器1270可以具有与第三电路板1250中的多个孔1250a对应的多个孔1270a。尽管保持器1270中的多个孔1270a可以是沿光轴oa的方向穿过保持器1270形成的通孔,但本公开内容不限于此。在另一实施方式中,保持器1270中的多个孔1270a可以是避让凹槽或避让部分,以避免与支承构件1220发生空间干涉。823.例如,保持器1270中的多个孔1270a可以设置成环绕保持器1270中的孔1071,并以规则的间隔彼此隔开。例如,多个孔1270a可以定位在保持器1270中的孔1071与保持器1270的侧部之间的区域。824.参照图40,保持器1270的第二表面1070b可以设置有突起1275。保持器1270的突起1275可以从保持器1270的第二表面1070b朝向基座1210的底部突出。825.保持器1270的突起1275可以比连接弹性构件1280朝向基座1210的底部突出得更甚。替代性地,保持器1270的突起1275可以比将连接弹性构件1280联接至支承构件1220的焊料1902朝向基座1210的底部突出得更甚。826.例如,保持器1270的突起1275与基座1210的底部之间在光轴方向上的第一距离可以小于连接弹性构件1280与基座120的底部之间的第二距离。例如,第一距离可以小于焊料1902与基座120的底部之间的第三距离。827.突起1275可以作为止挡部,该止挡部构造成防止保持器1270的第二表面1070b、连接弹性构件1280和/或焊料1902直接与基座1210的底部碰撞。828.例如,尽管突起1275可以设置在保持器1270的第二表面1070b的拐角处,但本公开内容不限于此。在另一实施方式中,突起1275可以设置在保持器1270的第二表面1070b的侧部处,或者设置在保持器1270的第二表面1070b的侧部与孔1071之间。829.参照图42,保持器1270可以具有从其第二表面1070b凹陷的至少一个凹槽1272。830.例如,保持器1270可以具有与第二表面1070b的多个侧部(例如,四个侧部面)对应的多个凹槽(例如,四个凹槽)。831.凹槽1272中的每个凹槽可以包括:底部1272a,底部1272a在光轴oa的方向上相对于第二表面1070b具有高度差;以及侧壁1272b,侧壁1272b将底部1272a连接至第二表面1070b。832.例如,凹槽1272的底部1272a可以定位成距保持器1270的第一表面1070a比距保持器1270的第二表面1070b更近。833.保持器1270中的多个孔1270a可以在光轴方向上与保持器1270中的凹槽1272重叠。例如,多个孔1270a中的每个孔可以具有形成在凹槽1272的底部1272a中的开口。形成在底部1272a中的多个孔1270a中的每个孔的开口可以相对于保持器1270的第二表面1070b在光轴方向上具有高度差。834.例如,多个孔1270a可以穿过保持器1270中的凹槽1272的底部1272a形成。835.此处,保持器1270中的凹槽1272可以用于避免连接弹性构件1280与保持器1270之间发生空间干涉,以在连接弹性构件1280在ois操作期间弹性变形时允许容易的弹性变形。836.连接弹性构件1280可以联接至保持器1270。连接弹性构件1280可以用于允许ois可移动单元移动并允许传输导电信号。例如,连接弹性构件1280可以将支承构件1220导电地连接至第四电路板1260的端子1262。837.例如,连接弹性构件1280可以设置在保持器1270下方。838.连接弹性构件1280可以经由粘合构件等联接至保持器1270的第二表面1070b。839.连接弹性构件1280可以将支承构件1220导电地连接至第四电路板1260,并且可以包括弹性变形部分,该弹性变形部分是可弹性变形的。连接弹性构件1280的弹性变形部分可以联接至支承构件1220。840.连接弹性构件1280可以包括与支承构件1220对应的连接弹簧1281(参见图40)。图18中所示的连接弹簧1281的描述可以在修改或未修改的情况下适用于连接弹簧1281。841.例如,连接弹性构件280可以包括多个连接弹簧1281。多个连接弹簧1281可以对应于相应的支承构件1220。多个连接弹簧1281可以设置成彼此在导电方面隔离或间隔开。842.连接弹簧1281中的每个链接弹簧1281可以包括与第四电路板1260的第二端子1262联接的第一联接器31、与支承构件1220联接的第一联接器32、以及将第一联接器31连接至第二连接器32的连接器33。843.连接弹簧1281的第一联接器31可以由保持器1270支承。例如,第一联接器31可以设置在保持器1270的第二表面1070b上,并且可以由保持器1270的第二表面1070b支承。844.例如,第一联接器31可以邻近保持器1270中的至少一个凹槽1272设置在保持器1270的第二表面1070b上。845.例如,第一联接器31可以包括第一部分31a和第二部分31b,第一部分31a由保持器1270支承并连接至连接器33,第二部分31b连接至第一部分31a并联接至第四电路板1260的第二端子262。846.例如,第一联接器31的第一部分31a可以在光轴方向上与保持器1270的第二表面1070b重叠,并且第二部分31b可以在光轴方向上不与保持器1270的第二表面1070b重叠。第一联接器31的第二部分31b的至少一部分可以在光轴方向上与第四电路板1260的第二端子1252重叠。例如,第二部分31b可以沿从保持器1270的内表面朝向第四电路板1260的第二端子1252的方向突出。847.第二联接器32可以经由焊料1902或导电粘合构件联接至支承构件1220的一个端部(例如,下端部)。例如,第二联接器32可以设置成在光轴方向上与保持器1270中的孔1270a重叠。第二联接器32可以具有孔32a,支承构件1220延伸穿过孔32a。848.穿过第二联接器32中的孔32a的支承构件1220的一个端部可以经由导电粘合构件或焊料1902直接联接至第二联接器32,由此第二联接器32可以导电地连接至支承构件1220。849.例如,第二联接器32是这样的区域,在该区域处,焊料1902设置成联接至支撑构件1220,第二联接器32可以包括孔32a和位于孔32a周围的区域。尽管第二联接器32可以构造成具有圆形形状,但本公开内容不限于此。在另一实施方式中,第二联接器32可以构造成具有多边形形状(例如,四边形形状)或椭圆形形状。850.第二联接器32和连接器33可以在光轴方向上与保持器1270中的凹槽1272重叠。例如,第二联接器32和连接器33可以设置在保持器1270中的凹槽1272中。例如,第二联接器32和/或连接器33可以设置成与保持器1270间隔开。851.例如,连接弹性构件1280可以包括四个组1001a、1002a、1003a和1004a,所述四个组1001a、1002a、1003a和1004a对应于第四电路板1260的四个侧部部分(侧向侧表面)或保持器1270的四个侧部部分(或侧向侧表面)。852.多个组1001a、1002a、1003a和1004a中的每个组可以包括多个连接弹簧1001-1至1001-9、1002-1至1002-9、1003-1至1003-9和1004-1至1004-9。853.此外,第四电路板1260的端子262可以被分类成与连接弹性构件1280的组1001a至1004a对应的多个组。第四电路板1260的多个组中的每个组可以包括多个端子p1至p9、s1至s9、r1至r9、或q1至q9。854.例如,第四电路板1260的多个端子p1至p9、s1至s9、r1至r9和q1至q9中的每个端子可以经由焊料联接至多个连接弹簧1001-1至1001-9、1002-1至1002-9、1003-1至1003-9和1004-1至1004-9中的对应的一个连接弹簧。855.对图15中所示的连接弹性构件280的组1a、2a、3a和4a的描述可以在修改或未修改的情况下适用于图43中所示的连接弹性构件1280的多个组1001a、1002a、1003a和1004a。856.参照图41,连接弹性构件1280还可以包括本体1085a和包括延伸部1085b的绝缘构件1285。连接弹性构件1280还可以包括一个或更多个虚设构件(或虚设图案)1028-1至1028-4。对绝缘构件285和虚设构件28-1至28-4的描述可以在修改或未修改的情况下适用于绝缘构件1285和虚设构件1028-1至1028-4。857.例如,绝缘构件1285可以对连接弹簧1001-1至1001-9、1002-1至1002-9、1003-1至1003-9和1004-1至1004-9进行支承,并且可以联接或附接至保持器1270的第二表面1070b。858.例如,绝缘构件1285可以在其中具有孔或腔。绝缘构件1285中的孔或腔可以与第一电路板1800中的孔1800a、第三电路板1250中的孔1501以及保持器1270中的孔1071在光轴方向上对应、重叠或对准。859.例如,本体1085a可以具有孔或腔,该孔或腔与第一电路板1800中的孔1800a、第三电路板1250中的孔1501和保持器1270中的孔1071中的至少一者在光轴方向上对应、重叠或对准。860.延伸部1085b可以从本体1085a朝向保持器1270的外表面延伸。例如,延伸部1085b可以设置成环绕保持器1270中的凹槽1272。861.支承构件1220可以将第一电路板1800导电地连接至连接弹性构件1280。862.支承构件1220可以包括与连接弹性构件1280的组1001a、1002a、1003a和1004a对应的多个组。支承构件的多个组中的每个组可以包括多个支承构件(或布线)。863.例如,支承构件1220可以包括与多个连接弹簧对应的多个支承构件。支承构件1220可以替代性地被称为“布线”。864.支承构件1220可以在其一个端部处联接至第一电路板1800,并且在其另一个端部处联接至连接弹簧1281的第二联接器32。865.例如,支承构件1220的一个端部可以延伸穿过第一电路板1800中的孔1800b,并且可以经由第一焊料1901联接至第一电路板1800的第一表面(例如,上表面)1044a,并且支承构件1220的另一个端部可以延伸穿过连接弹簧1281的第二联接器32中的孔32a,并且可以经由第一焊料1901联接至第二联接器32的下部部分或下表面。例如,支承构件1220的一个端部可以联接且导电地连接至第一电路板1800的端子1800b。866.支承构件1220可以延伸穿过壳体1450的避让区域1041、第三电路板1250中的孔1250a和保持器1270中的孔270a,并且可以避免与壳体1450、第二电路板1250和保持器1270发生空间干涉。867.支承构件1220可以实施为是导电的并提供弹性支承的构件,例如,悬线、板簧或螺旋弹簧。868.图像传感器单元1350还可以包括滤光器1610。图像传感器单元1350还可以包括滤光器保持器1600,滤光器1610设置、坐置或接纳在滤光器保持器1600中。滤光器保持器1600可以替代性地被称为“传感器基座”。869.滤光器1610可以用于防止穿过镜筒1400的光中的某个频率范围中的光入射在图像传感器1810上。图9中所示的滤光器的描述可以在修改或未修改的情况下适用于滤光器1610。870.例如,滤光器保持器1600可以设置在af操作单元1100下方。例如,滤光器保持器1600可以设置在第四电路板1260上方。871.滤光器保持器1600可以联接至第四电路板的位于图像传感器1810周围的区域,并且可以通过第一电路板1800中的孔1800a和第三电路板1250中的孔1501暴露。例如,滤光器保持器1600可以通过第一电路板1800中的孔1800a和第三电路板1250中的孔1501可见。872.例如,滤光器保持器可以联接至第四电路板1260的第一表面(例如,上表面)的位于坐置区域1260a周围的区域。尽管坐置区域1260a可以是与图39a中的第四电路板1260的第一表面相同的表面,但本公开内容不限于此。在另一实施方式中,坐置区域1260a可以是凹槽或突起。873.第三电路板1250中的孔1501可以使设置在第四电路板1260处的滤光器保持器1600、以及穿过该孔设置在滤光器保持器1600处的滤光器1610暴露。874.滤光器保持器1600可以具有形成在供安装或设置滤光器1610的区域中的孔1060a,以便允许已经穿过滤光器1610的光入射在图像传感器1810上。滤光器保持器1600中的孔1060a可以具有沿光轴方向穿过滤光器保持器1600形成的通孔的形式。例如,滤光器保持器1600中的孔1060a可以穿过滤光器保持器1600的中央形成,以便对应于或面向图像传感器1810。滤光器保持器1600可以具有从其上表面凹陷以便在其中接纳滤光器1610的坐置部分1500。滤光器1610可以设置、坐置或安装在坐置部分1500中。坐置部分1500可以构造成环绕孔1060a。在另一实施方式中,滤光器保持器1600的坐置部分1500可以构造成具有从滤光器1610的上表面突出的突起的形式。875.图像传感器1350还可以包括设置在滤光器1610与坐置部分1500之间的粘合构件1612。因此,滤光器1610可以经由粘合构件1612联接或附接至滤光器保持器1600。例如,粘合构件1612和1061可以是环氧树脂、热硬化粘合剂或紫外线硬化粘合剂。876.相机模块1010还可以包括盖构件1300和基座1210,以便在其中接纳af操作单元1100和图像传感器单元1350,保护af操作单元1100和图像传感器单元1350免受外部冲击,并防止从外部引入异物。877.盖构件1300可以构造成具有盒子的形式,盖构件1300在其下表面处敞开放并且包括上板1301和侧板1302。盖构件1300的侧板1302的下部部分可以联接至基座1210。盖构件1300的上板1301可以构造成具有多边形形状,例如,四边形形状或八边形形状。878.盖构件1300可以具有形成在其上板1301中的孔,联接至线圈架1110的透镜(未示出)通过该孔暴露于外部光。盖构件1300的侧板1302中的一个侧板1可以设置有孔1304,电路板1190的端子构件1905通过该孔暴露。879.基座1210可以设置在保持器1270下方。基座1210可以具有与盖构件1300一致或对应的形状,例如,四边形形状。880.例如,尽管基座1210可以呈具有在光学方向上穿过基座1210形成的通孔形式的孔,但在另一实施方式中可以省去该孔。881.基座1210可以具有阶梯部1211(参见图44a),当盖构件1300被粘合地固定至该阶梯部1211时,粘合剂被施加至该阶梯部。此处,阶梯部1211可以对联接至阶梯部1211的盖构件1300的侧板1302进行导引。基座1210的阶梯部1211可以使用粘合剂等附接或固定至盖构件1300的侧板1302的下端部。882.尽管基座1210的下部分或下侧部可以由底盖1219封闭或阻挡,但本公开内容不限于此。在另一实施方式中,可以省去底盖1219。883.将关于ois操作来描述根据实施方式的图像传感器单元1350的固定部分和可移动部分。884.图像传感器单元1350可以包括固定部分、可移动部分(或移动部分)、以及构造成将固定部分连接和联接至可移动部分的弹性支承构件1220和1280。可移动部分可以替代性地被称为“ois可移动部分”(或“ois移动部分”)。ois可移动部分可以相对于固定部分在垂直于光轴oa的方向上可移动。885.借助弹性支承构件1220和1280,设置在ois固定部分下方的ois可移动部分可以在与固定部分以预定距离间隔开的状态下定位。换句话说,在可移动部分经由支承构件1220悬挂于固定部分的状态下,可移动部分可以通过由磁体1023与线圈之间的相互作用而产生的电磁力而相对于固定部分可移动。886.弹性支承构件1220和1280的一个端部(例如,支承构件1220的一个端部)可以联接至第一电路板1800,并且弹性支承构件1220和1280的另一个端部(例如,连接弹簧1281的第一部分31)可以联接至第二电路板1900,例如,第四电路板1260。887.经由弹性支承构件1220和1280,第一电路板1800可以导电地连接至第二电路板1900,例如第四电路板1260。888.通过由第二线圈1230与磁体1023之间的相互作用而产生的电磁力,ois可移动部分可以相对于固定部分沿垂直于光轴的方向移动。889.例如,借助磁体1023与线圈1230之间的相互作用,图像传感器1810可以沿垂直于光轴oa的方向移位或倾斜,或者可以绕光轴oa旋转。例如,光轴方向可以是与图像传感器1810的一个表面垂直的方向。例如,图像传感器1810的一个表面可以是图像传感器1810的上表面。替代性地,图像传感器1810的一个表面可以是与透镜模块1400或滤光器1610的下表面对应或面向的表面。例如,图像传感器1810的一个表面可以是活动区域。890.借助支承构件1220和连接弹性构件1280,ois可移动单元可以被弹性地支承,并且可以在垂直于光轴的方向上可移动。891.固定部分可以包括第一电路板1800、壳体1450和磁体1023。此外,固定部分可以包括基座1210、盖构件1300和底盖1219中的至少一者。此外,固定部分可以包联接至第一电路板1800的元件,例如,运动传感器1820和电容器。892.ois可移动部分可以包括第三电路板1250、第二线圈1230、第四电路板1260和图像传感器1810。此外,ois可移动部分可以包括保持器1270。893.此外,ois可移动部分可以包括联接至第三电路板1250的元件,例如,第二位置传感器1240、运动传感器1820、控制器830、存储器1512和电容器1514。此外,ois可移动部分可以包括滤光器保持器1600和滤光器1610。894.例如,ois可移动部分可以包括联接至连接弹性构件1280的第四电路板1260、联接至第四电路板1260的图像传感器1810和第三电路板1260、以及联接至第三电路板1250的保持器1270,并且可以由支承构件1220和连接弹性构件1280弹性地支承。895.磁体1023可以设置在固定部分处,并且第二线圈1230可以设置在ois可移动单元处。ois可移动部分可以通过由磁体1023与第二线圈1230之间的相互作用产生的电磁力而相对于固定部分移动或倾斜。896.参照图46和图47,为了允许ois可移动部分通过由磁体1023与第二线圈1230之间的相互作用产生的电磁力而相对于固定部分移动或倾斜,ois可移动部分可以与ois固定部分间隔开。897.例如,保持器1270、第二电路板1900和图像传感器1810可以与第一电路板1800、壳体1450和基座1210间隔开。898.例如,在ois可移动部分的初始位置处,保持器1270的外表面可以与基座1210的内表面间隔开预定距离d1。899.此外,在ois可移动部分的初始位置处,保持器1270的下表面和第四电路板1260的下表面可以与基座1210的前表面(或上表面)间隔开预定距离h1。例如,在ois可移动部分的初始位置处,保持器1270的下表面和第四电路板1260的下表面可以与底盖1219的前表面(或上表面)间隔开。900.例如,在ois可移动部分的初始位置处,焊料1902可以与底盖1219的前表面(或上表面)间隔开预定距离h2。此外,在ois可移动部分的初始位置处,焊料1902可以与基座1210的前表面(或上表面)间隔开。901.ois可移动单元的初始位置可以是在没有电力或驱动信号施加至第二线圈1230的状态下ois可移动部分的初始位置,或者是由于支承构件1220和连接弹性构件1280仅因ois可移动部分的重量弹性地变形而导致ois可移动部分所处的位置。902.另外,ois可移动部分的初始位置可以是当重力沿从第一电路板1800至第三电路板1250的方向作用时或当重力沿从第三电路板1250至第一电路板1800的方向作用时,ois可移动部分所处的位置。903.图49图示了将图像传感器1810、滤光器保持器1600和滤光器1610安装至第四电路板1260的过程。904.参照图49,可以首先通过芯片键合将图像传感器1810联接、固定或附接至第四电路板1260的坐置区域1260a(s110)。905.尽管图像传感器1810可以是电荷耦接设备(ccd)、金属氧化物半导体mos、cpd图像传感器和cid图像传感器中的一者,但本公开内容不限于此。906.随后,可以经由布线1088将图像传感器1810接合至第四电路板1260,使得图像传感器1810导电地连接至第四电路板1260(s120)。907.随后,可以经由粘合构件1061将其上安装有滤光器1601的滤光器保持器1600安装在第三电路板1260上(s130)。例如,滤光器1610可以经由粘合构件1612联接至滤光器保持器1600,并且然后滤光器保持器1600可以联接至第四电路板1260。在另一实施方式中,滤光器保持器1600可以联接至第四电路板1260,并且然后滤光器1610可以联接至滤光器保持器1600。908.在比较示例中,图像传感器可以安装在附加的传感器板上,并且然后传感器板可以连接至第四电路板。909.在比较示例中,传感器板可以通过焊接连接至第四电路板。焊接是附加的过程,并使得难以将传感器板连接至第四电路板。此外,在比较示例中,在将传感器板焊接至第四电路板期间,可能会在图像传感器处产生噪音,并且图像传感器可能会受到噪音的影响。另外,在比较示例中,由于焊接传感器板的过程中的公差堆叠,可能在透镜模块与图像传感器之间的对准以及透镜模块与盖构件之间的对准方面存在困难。910.在本实施方式中,比较示例中的传感器板被熔接至第四电路板,以便实现单个集成第四电路板1260。在该示例中,图像传感器1810从图像传感器单元1350的上方移动至第四电路板,并且然后通过芯片键合而接合至第四电路板1260,并且图像传感器通过引线键合而导电地连接至第四电路板。随后,滤光器保持器1600和滤光器1610从图像传感器单元1350上方移动至第四电路板1260,并联接至第四电路板1260。911.与比较示例相比,本实施方式能够简化组装相机的过程。此外,可以减少图像传感器的信号路径中的焊接点的数目,并且可以防止图像传感器变得不可操作或者可以抑制图像噪音。912.另外,与比较示例相比,本实施方式能够简化组装过程,并且因此能够消除公差堆叠。因此,在管理透镜模块1400的对准方面也是有利的。913.此外,与比较示例相比,本实施方式能够通过减少部件的数目和过程的数目来提供降低材料成本和制造成本的效果。914.尽管图39a和图40图示了这样的实施方式:在该实施方式中,第三电路板1250和第四电路板1260单独地设置,并且第三电路板1250的端子1251和第四电路板1260的端子1261彼此联接,以便将第三电路板1250导电地连接至第四电路板1260,但本发明的实施方式不限于此。在另一实施方式中,第三电路板和第四电路板可以整体地形成为单个板。此处,第四电路板的端子1262可以形成在该单个板的后表面上,并且可以联接至连接弹性构件1280。915.图22中所示的连接弹性构件280-1可以是连接弹性构件1280的另一实施方式。因此,图22中所示的连接弹性构件280-1的描述可以在修改或未修改的情况下适用于连接弹性构件1280。916.例如,板部分280-1中的孔79的表面积可以大于第四电路板1260的第二表面1060b的表面积。例如,板部分280-1中的孔可以使第四电路板1260的第二表面1060b和第四电路板1260的穿过该孔的端子262暴露。917.板部分280a可以设置在保持器1270的第二表面1070b上,并且可以经由粘合构件等联接或附接至保持器1270的第二表面1070b。918.在另一实施方式中,图29中所示的图像传感器单元1350可以代替图23中所示的图像传感器单元250而被应用。例如,根据另一实施方式的相机模块20可以包括透镜模块1400和图像传感器单元1350,并且图23的描述可以在修改或未修改的情况下被应用。919.例如,根据另一实施方式的相机模块20的透镜模块1400可以不在光轴方向上移动,而是可以在光轴方向上被固定。例如,在另一实施方式中,透镜模块1400可以不在垂直于光轴的方向上移动,并且可以在垂直于光轴的方向上被保持。相机模块20还可以包括图29中所示的盖构件1300。例如,透镜模块1400可以联接、附接或固定至保持器1600或第一电路板1800。例如,透镜模块1400的下部部分、下端部或下表面可以联接、附接或固定至保持器1600的上表面或第一电路板1800的上表面。替代性地,例如,透镜模块1400可以联接、附接或固定至盖构件1300。920.随着相机技术的发展,图像的分辨率变高,并且因此图像传感器的尺寸增加。由于图像传感器的尺寸增加,因此透镜模块的尺寸和用于使透镜模块移位的致动器的尺寸也增加。因此,不仅透镜模块的重量增加,而且用于使透镜模块移位的其他致动器组件的重量也增加。921.根据本发明的实施方式,使用以透镜移位方式操作的af操作单元(或第一致动器)1100来执行自动对焦,并且使用以图像传感器移位方式操作的图像传感器单元(或第二致动器)1350来执行光学图像稳定(ois),从而提高相机设备的可靠性。922.该实施方式能够使用传感器移位方式执行5轴手抖动校正。例如,5轴手抖动可以包括两个角度手抖动(例如,俯仰和偏转)、两个移位手抖动(例如,x轴移位和y轴移位)和一个旋转手抖动(例如,滚动)。923.图50图示了根据实施方式的控制器820。图51图示了存储在存储器1512中的校正值的实施方式。图52是图示了设定图51中所示的校正值的方法的视图。924.参照图50和图52,控制器830可以包括校正单元812和驱动单元813。控制器830还可以包括模数转换器811。925.控制器830可以接收ois位置传感器的输出。控制器830可以接收存储在存储器1512中的校正值cv。例如,ois位置传感器可以是第一传感器1240a、第二传感器1240b或第三传感器1240c。926.例如,ois位置传感器的输出可以是模拟信号或数字信号。927.例如,当ois位置传感器仅包括霍尔传感器时,ois位置传感器的输出可以是模拟信号,并且控制器830还可以包括模数转换器811,该模数转换器构造成将作为模拟信号的ois位置传感器的输出转换为数字信号(或数字值)。在下文中,数字值可以替代性地被称为“数字代码”。928.例如,当ois位置传感器是包括霍尔传感器的驱动器is时,ois位置传感器的输出可以是数字信号或数字值,并且可以省去模数转换器811。929.校正单元812可以基于从存储器1512接收的校正值cv来校正ois位置传感器的输出。930.例如,校正单元812可以输出通过从ois位置传感器的输出中减去校正值cv而获得的结果cs。在另一实施方式中,校正单元812可以输出通过将校正值cv与ois位置传感器的输出相加而获得的结果。这样做的原因是为了消除ois位置传感器的由ois线圈1230的磁场的影响或干扰而导致的输出。此处,ois线圈1230可以是与ois位置传感器对应的线圈。例如,第一ois线圈单元1230-1可以对应于第一传感器1240a,第二ois线圈单元1230-2可以对应第二传感器1240b,并且第三ois线圈单元1230-3可以对应于第三传感器1240c。931.例如,尽管校正单元812可以包括逻辑门、比较器、减法器和加法器中的至少一者,但本公开内容不限于此。校正单元812可以具有任何其他构造,只要其具有能够基于校正值cv改变或校正ois位置传感器的输出的电路构造即可。932.驱动单元813可以接收校正单元812的输出cs、基于所接收的校正单元813的输出控制用于驱动与ois位置传感器对应的ois线圈1230的驱动信号ds、并将控制器驱动信号ds供应至ois线圈1220。933.参照图51,存储器1512可以在其中存储与用于驱动ois线圈1230-1、1230-2和1230-3的驱动值对应的校正值。校正值可以以查找表的形式存储。此处,驱动值可以替代性地被称为“驱动代码值”、“代码值”或“控制值”。934.用于驱动ois线圈1230-1、1230-2和1230-3的驱动值可以包括与ois行程范围对应的驱动代码值(a1至an,n是大于1的自然数或有理数)。例如,驱动值可以是数字值或数字代码,其由k位(例如,k是大于1的自然数或有理数)构成。此处,ois行程可以是ois可移动部分在垂直于光轴的方向上的位移,并且ois行程范围可以是ois可移动部分在垂直于光轴的方向上的移动范围(或移动区域)。935.校正值可以包括与驱动代码值(a1至an,n是大于1的自然数或有理数)对应的校正代码值(c1至cn)。936.当在不存在磁体(例如,1023a至1023d)的条件下向ois线圈(例如,1230-1)施加与驱动值a1至an对应的驱动电流时,可以通过施加的驱动电流从ois线圈(例如,1230-1)产生磁场。ois位置传感器(例如,1240a)可以输出与ois线圈(例如,1230-1)的磁场的检测结果对应的输出(或输出信号)。937.此处,第一传感器1240a的输出可以由通过施加的驱动电流产生的磁场引起。由于磁场是妨碍正确ois正确操作的不期望的因素,因此优选的是出于正确ois操作的目的而消除磁场。938.可以基于第一传感器1240a的输出来设定校正值c1至cn。例如,校正值c1至cn可以是与ois线圈(例如,1230-1)的磁场的检测结果对应的位置传感器的输出,并且可以是数字值。939.尽管图52图示了第一传感器1240a和对应于第一传感器1240的第一ois线圈1230-1,但其描述可以适用于第二传感器1240b和对应于第二传感器1240b的第二ois线圈1220-2、以及第三传感器1240c和对应于第三传感器1240c的第三ois线圈1240-3。940.例如,尽管存储器1512可以包括其中存储有分别与第一至第三ois位置传感器1240a、1240b和1240c对应的校正值的查找表,但本公开内容不限于此。在另一实施方式中,可以使用图52中所示的单个查找表来校正第一传感器至第三传感器1240a、1240b和1240c的各自的输出。941.图53图示了存储在存储器1512中的校正值cv1的另一实施方式。图54是图示了设定图53中所示的校正值cv1的方法的视图。尽管校正值cv在图52中在从相机模块1010移除了磁体1023a至1023d的状态下设定,但是校正值cv1也可以在图54中在相机模块1010中设置磁体1023a至1023d的状态下设定。942.首先,在ois可移动部分的初始位置处,ois位置传感器(例如,1240a)可以检测与ois位置传感器(例如,1240a)对应的磁体(例如,1023a)的磁场的强度,并且可以输出与检测的结果对应的输出。与在ois可移动部分的初始位置处的ois位置传感器(例如,1240a)的输出对应的数字值m1或数字代码可以存储在存储器1512中。943.m1可以是在没有驱动信号施加至ois线圈1230-1至1230-4的状态下由磁体(例如,1023a)的磁场引起的ois位置传感器(例如,1240a)的输出。944.例如,在ois可移动部分的初始位置处的ois位置传感器的输出可以是数字值,并且数字值可以是从模拟信号转换的。945.例如,校正值cv1可以被称为“第一校正值”,并且m1可以被称为“第二校正值”。存储器1512可以在其中存储第一校正值cv1和第二校正值m1。第一校正值csv1和第二校正值m1可以是数字值或数字代码,并且可以以查找表的形式存储在存储器1512中。946.随后,设置在相机模块1010中的磁体(例如,1023a)可以借助于固定设备比如夹具固定成不可移动。当将与驱动值a1至an对应的驱动电流施加至ois线圈(例如,1230-1)时,可以通过施加至ois线圈的驱动电流从ois线圈(例如,1230-1)产生磁场。947.位置传感器(例如,1240a)可以输出与第一磁场和第二磁场的检测结果对应的输出(或输出信号)。948.例如,第一磁场可以是在ois可移动部分的初始位置处的磁体(例如,1023a)的磁场,并且第二磁场可以是由与驱动值a1至an对应的驱动电流产生的ois线圈(例如,1230-1)的电磁场。949.可以基于第一传感器1240a的输出来设定第一校正值cv1。例如,第一校正值cv1可以是ois位置传感器(例如,1240a)的下述输出:该输出与在ois可移动部分的初始位置处的磁体(例如,23a)的磁场和由与驱动值a1至an对应的驱动电流产生的ois线圈(例如,1230-1)的磁场的检测结果对应,并且第一校正值cv1可以是数字值。950.例如,第一校正值b1至bn可以是通过将由第一磁场引起的ois位置传感器(例如,1240a)的输出与由第二磁场引起的ois位置传感器(例如,1240a)的输出相加而获得的值。951.在另一实施方式中,存储器1512可以在其中存储第三校正值。第三校正值可以是通过从第一校正值cv1减去第二校正值m1而获得的值(b1-m1至bn-m1)之一。952.尽管图53图示了第一传感器1240和与第一传感器1240a对应的第一ois线圈1230-1,但其描述可以在修改或未修改的情况下适用于第二传感器1240b和与第二传感器1240b对应的第二ois线圈1230-2、以及第三传感器1240c和与第三传感器1240c对应的第三ois线圈1230-3。953.图55图示了根据另一实施方式的ois位置传感器1240a的布置。图55中所示的ois位置传感器1240a的描述可以在修改或未修改的情况下适用于其他传感器1240b和1230c。954.参照图55,ois位置传感器(例如,1240a)可以设置在对应的ois线圈(例如,1230-1)下方。其原因是减少由ois线圈单元(例如,1230-1)的磁场引起的对位置传感器的输出的影响。955.例如,ois位置传感器1240a可以在垂直于光轴方向的方向上不与ois线圈单元1230-1重叠。例如,ois位置传感器(例如,1240a)可以设置在第二电路板1900下方,并且可以在光轴方向上不与ois线圈单元(例如,1230-1)重叠。956.图55中所示的实施方式可以包括保持器1270-1以代替图39a中所示的保持器1270。957.保持器1270-1可以设置在第一电路板1800下方。保持器1270-1可以设置成与第一电路板1900间隔开,并且保持器1270可以联接至第二电路板1900。958.保持器1270-1可以接纳或支承第二线圈1230。保持器1270-2可以用于对第二绕组1240进行支承,以便将第二线圈1240与第二电路板1900间隔开。959.例如,保持器1270-1的下部部分、下表面或下端部可以联接至第二电路板1900的上部部分、上表面或上端部。960.保持器1270-1可以具有与ois位置传感器1240对应的孔1041a。例如,保持器1270-2可以具有形成在与第一传感器至第三传感器1240a、1240b和1240c中的每一者对应的位置处的孔1041a。例如,孔1041a可以是穿过保持器1270-1形成的通孔。ois位置传感器1240可以设置在保持器1270-1中的孔1041a中。961.尽管在图55中所示的实施方式中减少了由ois线圈单元(例如,1230-1)的磁场引起的对ois位置传感器的输出的影响,但该输出仍可能受到磁场的影响。因此,为了更准确的ois反馈操作,图50至图54和图56至图58的描述也可以适用于图55中所示的实施方式。962.在另一实施方式中。图50至图54和图54至图58的描述可以在修改或未修改的情况下适用于图1至图27中所示的实施方式。963.图56图示了根据另一实施方式的控制器830a。964.参照图56,控制器830a可以包括校正单元812a、模数转换器(adc)811a、驱动单元813和数模转换器(dac)814。965.当第一传感器1240a的输出是模拟信号(例如,模拟电压或电流)时,校正单元812a可以接收作为模拟信号的ois位置传感器1240a的输出。966.数模转换器(dac)814可以从存储器1512接收校正值cv、cv1,并且可以使用所接收的校正值cv、cv1创建模拟信号as。967.校正单元812a可以接收与驱动值(例如,a1至an)对应的ois位置传感器(例如,1240a)的输出和数模转换器814的输出。968.例如,校正单元812a可以输出ois位置传感器(例如,1240a)的输出与数模转换器814的输出之间的差。969.例如,校正单元812a可以输出通过从ois位置传感器(例如,1240a)的输出ht减去模拟转换器814的输出as而获得的结果cs1。例如,校正单元812a可以实施为比较器、差分放大器、运算放大器等。970.例如,校正单元812a可以对ois位置传感器(例如,1240a)的输出ht和模拟转换器814的输出as执行差分放大,并且可以输出差分放大信号cs1。971.模数转换器811a可以对校正单元812a的输出cs1执行模数转换,并且可以输出与模数转换的结果对应的数字值dcs或数字代码。972.驱动单元813可以接收模数转换器811a的输出dcs,可以基于所接收的输出dcs来控制用于激活与ois位置传感器对应的ois线圈230的驱动信号ds,并且可以将所控制的驱动信号ds供应至ois线圈230。973.图50和图56的描述可以适用于其他位置传感器1240b和1240c。974.图57是图示了根据实施方式的控制器830、830a的操作的流程图。975.参照图57,控制器830、830a向ois线圈单元(例如,1230-1)施加或供应与用于使ois驱动单元、例如图像传感器1810移动至ois行程范围中的目标位置的驱动值(例如,a2)对应的驱动信号(s1110)。976.控制器830、830a接收与ois线圈单元(例如,1230-1)对应的ois位置传感器(例如,1240a)的输出(s120)。977.控制器830、830a从存储器1512接收与驱动值(例如,a2)对应的校正值(例如,c2)(s1130)。978.控制器830、830a基于校正值(例如,h2)校正ois位置传感器(例如,1240a)的输出(s1140)。979.例如,控制器830、830a可以从ois位置传感器(例如,1240a)的输出减去校正值(例如,c2),并且可以输出减去的结果。980.图58是图示了校正ois位置传感器(例如,1240a)的输出的实施方式的表。图58可以利用图51中所示的查找表。981.参照图58,控制器830、830a可以从与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn中减去存储在查找表中的校正值c1至cn,并且可以输出减去的结果(h1-c1至hn-cn)。982.图59是图示了校正ois位置传感器(例如,1240a)的输出的另一实施方式的表。图59可以利用图53中所示的查找表。983.参照图59,控制器830、830a可以使用存储在查找表中的第一校正值b1至bn和第二校正值来校正与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn,并且可以输出校正的结果。984.例如,控制器830、830a可以从与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn中减去第一校正值b1至bn,并且可以输出通过将第二校正值m1与减去的结果相加而获得的值h1-b1 m1至hn-bn m1。985.在另一实施方式中,控制器830、830a可以使用图53中所示的第三校正值来校正与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn,并且可以输出校正的结果。986.例如,控制器830、830a可以从与驱动值a1至an对应的ois位置传感器(例如,1240a)的输出h1至hn中减去第三校正值b1至bn,并且可以输出减去的结果。987.控制器830、830a使用ois位置传感器(例如,1240a)的经校正的输出来控制用于激活ois线圈的驱动值或驱动信号(s1150)。988.存储器1512可以在其中存储与ois可移动部分的位移对应或匹配的ois位置传感器的输出的代码值,以用于ois反馈操作。989.例如,存储器1512可以在其中存储与ois可移动部分在x轴方向上的位移对应或匹配的ois位置传感器的输出的代码值、以及与ois可移动部分在y轴方向上的位移对应或匹配的ois位置传感器(例如,第二传感器1240b)的输出的码值。990.替代性地,例如,存储器1512可以在其中存储与ois可移动部分在x轴方向上或在y轴方向上的位移对应或匹配的ois位置传感器(例如,第三传感器1240c)的输出的代码值。991.图60图示了与ois可动部分在x轴方向上的位移dp1至dpn对应或匹配的第一传感器1240a的输出的代码值代码_1至代码_n。992.当通过模拟或实验按照驱动值a1至an向线圈单元(例如,1230-1)供应驱动信号时,ois可移动部分移动,并且获得与ois可移动部分的位移匹配的第一传感器1240a的输出的代码值(或“坐标代码值”)。此程序称为“校准”。993.此外,通过校准,可以获得与ois可移动部分在y轴方向上的位移对应于或匹配的第二传感器1240b的输出的代码值。994.ois可移动部分的位移可以由通过校准创建的坐标代码值限定或确定,并且可以通过重复模拟和实验确保坐标代码值的可靠性。可以基于可靠的坐标代码值来执行ois反馈操作。995.例如,控制器830、830a可以将以图51至图53中说明的方式被校正的ois位置传感器(例如,1240a)的输出与图60中所示的坐标代码值代码_1至代码_n进行比较,并且可以基于比较的结果控制用于激活ois线圈的驱动值或驱动信号。996.在另一实施方式中,图51中所示的校正值cv或图53中所示的第一校正值、第二校正值或第三校正值可以适用于通过校准创建的坐标代码值。换句话说,可以修正或校正通过校准创建的坐标代码值,并且可以使用校正后的坐标代码值来控制用于激活ois线圈的驱动值或驱动信号。997.例如,可以从通过校准创建的坐标代码值代码_1至代码_n中减去校正值cv(或第三校正值)而获得的结果设定新的坐标代码值,并使用新设定的坐标代码值来控制用于激活ois线圈的驱动值或驱动信号。998.如图39a、图39b和图45中所图示的,ois线圈单元1230-1至1230-4和ois位置传感器1240a至1240c可以设置或安装在第三电路板1250的第一表面1051a上。999.例如,ois线圈单元(例如,1230-1)可以具有形成在其中央的开口或孔,并且ois位置传感器(例如,1240a)可以设置在与ois位置传感器(例如,1240a)对应的ois线圈单元(例如,1230-1)中的开口或孔中。1000.例如,ois位置传感器(例如,1240a)可以在与光轴垂直的方向上或在与第二电路板1900的上表面平行的方向上与和ois位置传感器(例如,1240a)对应的ois线圈单元(例如,1230-1)重叠。1001.如上所述,ois线圈单元1230-1至1230-4和分别与ois线圈元件1230-1至1230-4对应的ois位置传感器1240a至1240c可以设置成与第三电路板1250的第一表面1051a相邻。1002.当将驱动信号施加至ois线圈单元(例如,1230-1)以进行ois操作时,可以从ois线圈单元(例如,1230-1)产生磁场。为了执行准确的ois反馈操作,ois位置传感器1240a的输出必须与仅由固定至ois固定部分的磁体1023a产生的磁场的检测结果对应。然而,由于ois线圈单元1230-1和ois位置传感器1240a彼此相邻地设置,因此ois位置传感器1240a的输出可能会受到由ois线圈1230-1产生的磁场的极大影响,并且因此ois反馈操作的准确性和可靠性可能会劣化。1003.图61图示了关于输入至ois线圈单元(例如,1230-1)的驱动信号和ois位置传感器(例如,1240a)的输出的频率响应特性。在图61中,x轴指示频率,并且y轴指示增益。1004.参照图61,在ois线圈单元(例如,1230-1)中,可能会出现下述现象1038a(称为“卡布里现象()”):在该现象中,ois位置传感器的输出由于磁场的影响而在200hz至300hz之间的频率范围内异常增大或减小。1005.在本实施方式中,通过校正或消除在ois操作期间由从ois线圈单元产生的磁场引起的对ois位置传感器(例如,1240a)的输出的影响,可以防止上述卡布里现象的发生,并且可以准确且可靠地执行ois反馈操作,其结果是可以确保相机模块的手抖动校正的可靠性。1006.此外,由于即使在ois位置传感器和ois线圈单元彼此相邻地设置时也可以借助用于校正ois位置传感器的输出的技术来确保ois反馈操作的可靠性,因此可以提高设置ois位置传感器和ois线圈单元的自由性以降低相机模块的机械高度,并确保在第三电路板1250上有足够的空间来设置其他元件。1007.根据本实施方式的相机模块10或20可以包括在光学仪器中,该光学仪器设计成使用作为光的特性的反射、折射、吸收、干涉、衍射等在空间中形成物体的图像,以扩大视野、记录通过透镜获得的图像或再现图像、执行光学测量,或者传播或传输图像。例如,尽管根据实施方式的光学仪器可以是移动电话、蜂窝电话、智能电话、便携式智能仪器、数码相机、膝上型计算机、数字广播终端、pda(个人数字助理(personaldigitalassistant))、pmp(便携式多媒体播放器(portablemultimediaplayer))、导航设备等,但本公开内容不限于此。此外,任何能够拍摄图像或照片的设备都是可能的。1008.图62是图示了根据实施方式的光学设备200a的立体图。图29是图示了图28中所图示的便携式端子的构型的视图。1009.参照图28和图29,光学设备200a可以包括本体850、无线通信单元710、音频/视频(a/v)输入单元720、感测单元740、输入/输出单元750、存储器单元760、接口单元770、控制器780和电力供应单元790。1010.图28中所图示的本体850具有条形形状,但不限于此,并且可以是各种类型比方说例如滑动型、折叠型、摆动型或旋转型中的任何一种类型,其中,两个或更多个子本体联接成能够相对于彼此移动。1011.本体850可以包括限定端子的外观的壳(外壳、壳体、盖等)。例如,本体850可以被分成前外壳851和后外壳852。端子的各种电子部件可以容纳在于前外壳851与后外壳852之间限定的空间中。1012.无线通信单元710可以包括一个或更多个模块,所述一个或更多个模块使得光学设备200a与无线通信系统之间或光学设备200a与光学设备200a所在的网络之间进行无线通信。例如,无线通信单元710可以包括广播接收模块711、移动通信模块712、无线互联网模块713、近场通信模块714和位置信息模块715。1013.a/v输入单元720用于输入音频信号或视频信号,并且可以包括例如相机721和麦克风722。1014.相机721可以包括根据实施方式的相机模块10、20或1010。1015.感测单元740可以感测光学设备200a的当前状态,比方说例如光学设备200a的打开或关闭、光学设备200a的位置、用户触摸的存在、光学设备200a的定向或光学设备200a的加速/减速,并可以产生感测信号以控制光学设备200a的操作。当光学设备200a例如是滑动式便携式电话时,感测单元740可以感测滑动式便携式电话是打开还是关闭。此外,感测单元740可以感测来自电力供应单元790的电力的供应、接口单元770与外部设备的联接等。1016.输入/输出单元750用于生成例如视觉、听觉或触觉输入或输出。输入/输出单元750可以生成输入数据以控制光学设备200a的操作,并且可以显示在光学设备200a中处理的信息。1017.输入/输出单元750可以包括键盘单元730、显示模块751、声音输出模块752和触摸屏面板753。键盘单元720可以响应于键盘上的输入而生成输入数据。1018.显示模块751可以包括多个像素,多个像素的颜色根据施加至其的电信号而变化。例如,显示模块751可以包括液晶显示器、薄膜晶体管液晶显示器、有机发光二极管、柔性显示器和3d显示器中的至少一者。1019.声音输出模块752可以在例如呼叫信号接收模式、呼叫模式、记录模式、语音识别模式或广播接收模式下输出从无线通信单元710接收的音频数据,或者可以输出存储在存储器单元760中的音频数据。1020.触摸屏面板753可以将由用户对触摸屏的特定区域的触摸而引起的电容变化转换成电输入信号。1021.存储器单元760可以临时存储用于控制器780的处理和控制的程序、以及输入/输出数据(例如,电话号码、消息、音频数据、静止图像、运动图像等)。例如,存储器单元760可以存储由相机721捕获的图像,例如,图片或运动图像。1022.接口单元770用作以下路径:透镜移动装置通过该路径连接至与光学设备200a连接的外部设备。接口单元770可以从外部部件接收电力或数据,并且可以将电力或数据传输至光学设备200a内部的相应构成元件,或者可以将光学设备200a内部的数据传输至外部部件。例如,接口单元770可以包括有线/无线头戴式受话器端口、外部充电器端口、有线/无线数据端口、存储卡端口、用于连接至配备有识别模块的设备的端口、音频输入/输出(i/o)端口、视频输入/输出端口、耳机端口等。1023.控制器780可以控制光学设备200a的一般操作。例如,控制器780可以执行与例如语音呼叫、数据通信和视频呼叫相关的控制和处理。1024.控制器780可以包括用于多媒体回放的多媒体模块781。多媒体模块781可以在控制器780中实施或者可以与控制器780分开实施。1025.控制器780可以执行模式识别处理,该模式识别处理能够将在触摸屏上执行的书写输入或绘图输入分别识别为字符和图像。1026.电力供应单元790可以在控制器780的控制下在接收到外部电力或内部电力时供应操作相应构成元件所需的电力。1027.以上在实施方式中描述的特征、构型、效果等被包括在至少一个实施方式中,但本发明不只限于这些实施方式。另外,在各个实施方式中例示的特征、构型、效果等可以与其他实施方式组合或者由本领域技术人员修改。因此,与这些组合和修改有关的内容应被解释为落入本公开的范围内。1028.工业实用性1029.这些实施方式能够应用于相机模块和包括相机模块的光学设备,其能够执行准确的ois反馈操作并且因此能够确保ois操作的可靠性。当前第1页12当前第1页12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。