1.本发明是一种直线转旋转运动的精密传动装置。可用于多种机械结构或机械系统中。其中,在暖通行业的液压执行器作为调温阀使用时,特别适用作为智能控制部分的直线移动转换为旋转运动的精密传动装置。
背景技术:
2.在机械、电子、自动化、执行器传感器等行业中,利用旋转编码器来转换、读取直线位移数据,非常普遍。
3.受控端一般是直线移动或往复移动。作为传感器的元件。多采用电位器,则与被控端一致,位移信号读取方便。
4.因为滑移电位器是碳膜结构,相对运动是有接触的,所以其使用寿命很短,不能满足控制系统对使用寿命的要求;若采用旋转编码器,其相对运动的构件之间是非接触的感应结构,使用寿命远高于滑移电位器,能够满足产品使用寿命的要求。
5.由于旋转编码器的读数方式是旋转运动,所以被控制端的直线移动与旋转编码器的数据读取方式就必须能够精确转换。实现这种转换的最普遍和有效的方式,就是齿轮-齿条结构。
6.由于齿轮-齿条结构难以克服制造、装配、啮合等误差,该误差直接影响旋转编码器的读数精度,进而影响控制系统的控制精度。故而,如何解决上述位移信号的传递方式,保证齿轮、齿条始终保持无间隙地精准啮合,使转换后传递的信号精确无误,就是本发明的意义所在。
技术实现要素:
7.本发明是一种可以广泛应用的精密传动调整装置。齿轮-齿条机构,作为直移转旋转的运动机构,主要弊病是齿轮与齿条啮合时产生的侧向间隙带来的传动误差。通常减少误差提高传动精度的方法。不外乎:
①
提高传动链元件地制造精度,
②
采用弹簧机构以补偿产生的啮合间隙。
8.上述方法,弹簧机构的受力大小,是遵循胡克定律,即压紧力是随弹簧的压缩量的改变而改变的。因而不能保证齿轮-齿条在啮合时受到的正压力均衡,运动顺畅无阻滞。
9.本发明是针对其它装置的弊病,采取弹簧预紧或恒力预紧两种消除机构间隙的预紧方式而设计的一种直线变旋转运动的精密传动装置。
10.本发明的两种预紧方式,可以分别使用。采用恒力预紧方式使用时,只需移除弹簧,仅用重力悬锤,就可获得更高精度的位移传感读数。
11.本发明可用于所有需要此种调节机构的场合。
12.现以用于智能阀门执行器电控系统的工控板为例,阐述其工作原理(用于其他同类场合时、其工作原理相同)。
附图说明
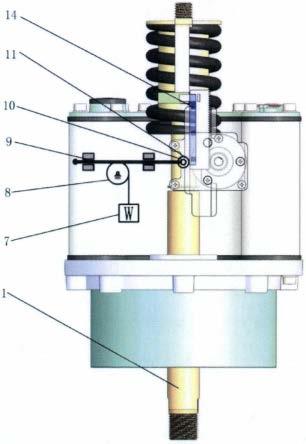
13.本发明包括(见图1、图2、图3):图1是以智能阀门执行器工控系统为例的恒力作精密调整机构的结构总图。图2是恒力作精密调整机构的结构轴侧示意图。图3是滑轮机构原理图。
具体实施方式
14.固连于液压执行器活塞杆1控制终端的行程拨杆2,所述行程拨杆2可随活塞杆1作往复运动。且能准确反映活塞杆运动1的脉冲数据,所述行程拨杆2 的另一端插入齿条3,并紧配合。当行程拨杆2上下往复运动时,即带动齿条3 作上下往复运动,所述齿条3做往复运动时与齿轮4啮合。齿轮4作正反向旋转运动。所述齿轮4与旋转编码器5的轴固连,所述旋转编码器5的相位角等同于同轴齿轮4的相位角。所述旋转编码器5通过旋转方式将受控阀杆的直线位移数据,准确地转变为用旋转方式读取的数字脉冲信号。所述齿轮
‑‑
齿条机构的传动误差,通过调整机构予以消除。所述调整机构有两种调整啮合间隙的方式,可分别选用。
15.所述弹簧调整方式,是通过弹簧14的弹性张力作用于齿条背面,消除齿轮齿条间的啮合间隙。所述调整滑块6受到的弹簧张力遵循胡克定律f=k
·
x。
16.在弹性系数为常数时,f会随弹簧14位移量x的大小改变,进而导致齿条受力不均、齿条翘头、齿轮旋转滞后、爬行等现象。所以,当使用要求提高,需所述旋转编码器12做精确分度时,则采用恒力调整机构。此时,所述调整机构的调整弹簧14可以去除,代之以本发明,即以重力悬锤滑轮机构推动张紧轮11,始终以恒力作用在齿条3背面,所述齿轮
‑‑
齿条机构在啮合运动中产生的啮合误差,被重力机构消除,所述旋转编码器12得以将活塞杆1的线性位移量精确读取,并以数字脉冲量传送给工控板13。所述工控板13经过运算处理后,输出控制信号,以精确控制活塞杆1的往复移动,构成完整精确的闭环控制系统。
技术特征:
1.一种恒力作间隙补偿的精密传动机构。采取弹簧预紧和(或)恒力预紧,消除齿轮-齿条啮合间隙的调整方式,并将直线移动转变为旋转运动的精密驱动装置(见图1、图2、图3)。2.根据权利要求书1所述的一种恒力作间隙补偿的精密传动机构,其特征在于:所述弹簧预紧方式是在齿条的非齿面啮合部的调整阀块6中,采用多点(多于两点)设置弹簧,所述弹簧的张力,始终作用于齿条,使得齿轮与齿条的啮合间隙被消除。3.根据权利要求书1所述的一种恒力作间隙补偿的精密传动机构,其特征在于:所述恒力预紧方式,即在齿轮-齿条传动系统中,针对传动副间的啮合误差,将齿轮4与旋转编码器12同轴固连在一起,通过以重力悬锤7及推杆9、压紧滚轮11等构成的滑轮调整机构,施加一个不随其他部件的运动而改变的恒力来压紧齿条3与齿轮4,消除其啮合间隙,进而保持受控端(活塞杆1)的直线位移转变为编码器12的旋转运动时,其读取的脉冲信号不丢失,准确无误。相较于其他方式更加精确。4.根据权利要求书1所述的一种恒力作间隙补偿的精密传动机构,其特征在于:弹力预紧和重力预紧方式作间隙补偿可以同时采用,亦可分别采用。当系统的传动精度为一般时,直接利用弹簧预紧方式;而当系统的传动精度为精密时,则必须单独采用恒力作间隙补偿的精密传动(方式)机构。5.根据权利要求书1所述的一种恒力作间隙补偿的精密传动机构,其特征在于:以重力悬锤滑轮机构推动张紧轮,始终以恒力作用在齿条背面,所述齿轮-齿条机构在啮合运动中产生的啮合误差,被重力机构消除,所述旋转编码器得以将活塞杆的线性位移量精确读取,并以数字脉冲量传送给工控板。所述工控板经过运算处理后,输出控制信号,以精确控制活塞杆的往复移动,构成完整精确的闭环控制系统。6.根据权利要求书1所述的一种恒力作间隙补偿的精密传动机构,其特征在于:所述推杆、压紧滚轮、齿轮-齿条的啮合点须处于同一直线上。
技术总结
本发明公开了一种恒力作间隙补偿的精密传动机构。在机械、执行器传感器等行业中,利用旋转编码器来转换、读取直线位移数据,是非常普遍、简洁的读数方式。由于旋转编码器的读数方式是旋转运动,输出的是数字脉冲,所以被控端的直线移动与编码器的旋转读取方式间就需要能精确地转换。精确与否最终表现在传动件的运动间隙的调整上。本发明通过恒力(重力)作间隙补偿的精密传动机构,解决了上述位移信号经传递方式转换后精确无误的难题,收到了极好地应用效果。应用效果。应用效果。
技术研发人员:徐和钢 夏冰
受保护的技术使用者:新疆天恒智能控制有限公司
技术研发日:2021.08.10
技术公布日:2023/2/17
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
