1.本公开涉及车辆用显示控制装置、车辆用显示装置、车辆用显示控制方法以及储存有车辆用显示控制程序的计算机可读存储介质。
背景技术:
2.在日本专利第6536855号公报(专利文献1)中记载有一种下述的技术:当相对于车辆前方的前行车辆进行追随行驶时,检测前行车辆的位置,使与检测出的前行车辆的位置对应的标记图像叠加到前行车辆来显示于hud(head-up display)。
3.在使hud显示对车辆的行驶路径进行引导的标记等内容的情况下,由于未必一定存在前行车辆,所以可考虑以导航用的地图信息所包括的路径线信息所表示的路径线为基准来控制内容的显示位置。但是,路径线信息所表示的路径线作为内容的显示位置的基准会导致车辆宽度方向的位置的精度不足。因此,若使内容保持不变地显示于路径线信息所表示的路径线上,则如图7所示,有时内容被显示为从驾驶员观察而位置相对于正行驶的车道在车辆宽度方向偏离,存在内容的美观度遭到破坏这一课题。
技术实现要素:
4.本公开是考虑到上述事实而完成的,其目的在于,获得能够使引导车辆的行驶路径的内容的美观度提高的车辆用显示控制装置、车辆用显示装置、车辆用显示控制方法以及车辆用显示控制程序。
5.第1方式所涉及的车辆用显示控制装置包括显示控制部,当使导航用的地图信息所包括的路径线信息所表示的路径线根据车辆的位置与上述路径线的沿着车辆宽度方向的距离在车辆宽度方向偏移了时,该显示控制部使内容显示于显示装置中的与偏移后的上述路径线上对应的位置。
6.在第1方式中,当以车辆的位置为基准使路径线在车辆宽度方向上修正(偏移)了时,使内容显示于显示装置中的与偏移后的路径线上对应的位置。由此,可抑制内容被显示为位置相对于正行驶的车道在车辆宽度方向偏离,能够使引导车辆的行驶路径的内容的美观度提高。
7.第2方式是在第1方式的基础上完成的,上述显示控制部基于由方位传感器检测出的上述车辆的方位来确定上述车辆宽度方向。
8.在第2方式中,由于在车辆宽度方向的确定中使用由方位传感器检测出的车辆的方位,所以能够高精度地确定车辆宽度方向。
9.第3方式是在第1方式或者第2方式的基础上完成的,上述显示控制部使用上述车辆内的乘员的视点的位置作为上述车辆的位置。
10.在第3方式中,由于使用车辆内的乘员的视点的位置作为车辆的位置,所以可抑制内容被显示为从乘员观察而位置相对于正行驶的车道在车辆宽度方向偏离。因此,根据第3方式,能够使从乘员观察的内容的美观度进一步提高。
11.第4方式是在第1方式~第3方式中的任一方式的基础上完成的,上述显示装置是hud。
12.如上述那样,在第1方式~第3方式中,可抑制内容被显示为位置相对于正行驶的车道在车辆宽度方向偏离。因此,通过使显示装置为hud,能够使显示装置作为ar(augmented reality:增强现实)-hud发挥功能。
13.第5方式所涉及的车辆用显示装置包括第1方式~第4方式中的任一方式所记载的车辆用显示控制装置和显示装置。
14.根据第5方式,与第1方式同样,能够使引导车辆的行驶路径的内容的美观度提高。
15.第6方式所涉及的车辆用显示控制方法通过计算机执行包括下述步骤的处理:当使导航用的地图信息所包括的路径线信息所表示的路径线根据车辆的位置与上述路径线的沿着车辆宽度方向的距离在车辆宽度方向上偏移了时,使内容显示于显示装置中的与偏移后的上述路径线上对应的位置。
16.根据第6方式,与第1方式同样,能够使引导车辆的行驶路径的内容的美观度提高。
17.第7方式所涉及的车辆用显示控制程序使计算机执行包括下述步骤的处理:当使导航用的地图信息所包括的路径线信息所表示的路径线根据车辆的位置与上述路径线的沿着车辆宽度方向的距离在车辆宽度方向偏移了时,使内容显示于显示装置中的与偏移后的上述路径线上对应的位置。
18.根据第7方式,与第1方式同样,能够使引导车辆的行驶路径的内容的美观度提高。
19.本公开能够使引导车辆的行驶路径的内容的美观度提高。
附图说明
20.图1是表示实施方式所涉及的车辆用显示装置及其周边的简要结构的框图。
21.图2是表示hud的一个例子的简要构成图。
22.图3是显示控制ecu的功能框图。
23.图4是表示由显示控制ecu执行的显示控制处理的一个例子的流程图。
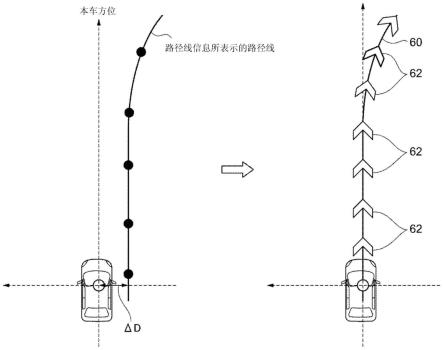
24.图5是对使路径线信息所表示的路径线在车辆宽度方向偏移(offset)的处理进行说明的示意图。
25.图6是表示在实施方式中将引导车辆的行驶路径的内容显示为从驾驶员观察而相对于正行驶的车道在车辆宽度方向无错位的状态的示意图。
26.图7是表示在现有技术中引导车辆的行驶路径的内容被显示为从驾驶员观察而相对于正行驶的车道在车辆宽度方向错位了的状态的示意图。
具体实施方式
27.以下,参照附图对本公开的实施方式的一个例子详细地进行说明。图1中示出了实施方式所涉及的车辆用显示装置10。车辆用显示装置10包括:hud12,被搭载于车辆,是显示装置的一个例子;和显示控制ecu(electronic control unit)22,控制hud12涉及的图像的显示以使hud12作为ar-hud发挥功能。其中,显示控制ecu22是本公开所涉及的车辆用显示控制装置的一个例子。
28.如图2所示,hud12包括:显示部14,射出显示图像的投影光;反射镜16,由凹面镜构
成并使从显示部14射出了的投影光向车辆的挡风玻璃(windshield)18反射/投影;以及反射镜角变更act(actuator)20。对挡风玻璃18中的被投影显示图像的范围的室内侧表面实施了半透半反镜等处理,乘员能够目视确认所投影的显示图像,且还能够穿过挡风玻璃18目视确认车辆外的光景。反射镜角变更act20通过变更反射镜16的角度,能够变更显示图像在挡风玻璃18上的投影位置。
29.如图1所示,显示控制ecu22包括cpu(central processing unit)24和rom(read only memory)以及ram(random access memory)等存储器26。另外,显示控制ecu22包括hdd(hard disk drive)或者ssd(solid state drive)等非易失性存储部28和通信接口(i/f)30。cpu24、存储器26、存储部28以及通信i/f30经由内部总线32连接为相互能够通信。
30.在存储部28存储有显示控制程序34。显示控制ecu22通过从存储部28读出显示控制程序34且在存储器26展开并由cpu24执行在存储器26展开了的显示控制程序34来作为图3所示的显示控制部36发挥功能,进行后述的显示控制处理。在使导航用的地图信息所包括的路径线信息所表示的路径线根据车辆的位置与路径线的沿着车辆宽度方向的距离而在车辆宽度方向进行了偏移时,显示控制部36使内容显示于hud12中的与偏移后的路径线上对应的位置。其中,显示控制程序34是本公开所涉及的车辆用显示控制程序的一个例子。
31.另外,显示控制ecu22与系统总线40连接,在该系统总线40连接有:周边状况取得设备组42,取得车辆周边的状况所涉及的信息;和方位传感器56,检测车辆的方位。周边状况取得设备组42包括gnss(global navigation satellite system)装置44、车载通信机46、导航系统48、雷达装置52以及照相机54等作为取得对车辆的周围环境是什么样的状况进行表示的信息的设备。
32.gnss装置44从多个gnss卫星接收gnss信号来定位本车辆的位置(纬度经度)。车载通信机46是进行与其他车辆之间的车间通信以及与路侧设备之间的路车间通信的至少一方的通信装置。导航系统48包括存储地图信息的地图信息存储部50,基于从gnss装置44获得的位置信息和存储于地图信息存储部50的地图信息来进行在地图上显示本车辆的位置、引导直至目的地为止的路径的处理。
33.其中,存储于地图信息存储部50的地图信息包括对沿着地图信息所表示的各道路设定的路径线进行表示的路径线信息。更详细而言,还如图5所示,路径线信息是通过离散地配置于路径线上的点列各自的纬度经度来表示路径线的信息。
34.雷达装置52向车辆周围照射电波(例如毫米波),根据照射出的电波的反射波来检测存在于本车辆的周边的行人、其他车辆等物体,取得检测到的物体与本车辆的相对位置以及相对速度。另外,雷达装置52基于最近多次的检测结果所包括的与各个物体的相对位置、相对速度的变化等来将噪声、护栏等路侧物等从监视对象排除,将行人、其他车辆等特定物体作为周边物标来进行追随监视。而且,雷达装置52输出与各个周边物标的相对位置、相对速度等信息。照相机54利用多个照相机拍摄本车辆的周围、输出拍摄到的图像。
35.接下来,作为本实施方式的作用,参照图4对在车辆的点火开关接通的期间由显示控制ecu22执行的显示控制处理进行说明。
36.在显示控制处理的步骤100中,显示控制部36对当前的时机是否是将引导车辆的行驶路径的内容显示于hud12的时机进行判定。例如在acc(adaptive cruise control)开启(on)而本车辆正追随前行车辆行驶等的情况下,步骤100的判定为否定而移至步骤102。
而且,在步骤102中,显示控制部36进行使其他内容(例如表示acc的设定车间时间的标记等)显示于hud12的处理。
37.另外,在步骤100的判定为肯定的情况下,移至步骤104。在步骤104中,显示控制部36从gnss装置44取得本车辆的当前位置(纬度经度)。其中,这里取得的本车辆的当前位置准确而言是本车辆中的gnss装置44的设置位置的纬度经度。
38.在接下来的步骤106中,显示控制部36从存储部28读出以本车辆的位置(gnss装置44的设置位置)为基准的本车辆内的乘员的视点(eyepoint)的相对位置。该相对位置例如能够预先测量并存储于存储部28,但也可以通过对包括乘员的车厢内进行拍摄的照相机等来检测。另外,显示控制部36基于在步骤104中取得的本车辆的位置和读出的相对位置来计算本车辆内的乘员的视点的坐标(纬度经度)。
39.在步骤108中,显示控制部36从导航系统48取得与在步骤104中取得的本车辆的位置对应的路径线信息(表示对于本车辆当前正行驶的道路设定了的路径线的路径线信息)并存储于存储器26。在步骤110中,显示控制部36从方位传感器56取得本车辆的方位。
40.在步骤112中,显示控制部36计算本车辆内的乘员的视点的位置与在步骤108中取得的路径线信息所表示的路径线的沿着车辆宽度方向(与从方位传感器56取得的本车辆的方位正交的方向)的距离δd(参照图5)。
41.在步骤114中,显示控制部36通过使存储于存储器26的路径线信息所包括的点列各自的纬度经度在车辆宽度方向偏移距离δd,来使存储于存储器26的路径线信息所表示的路径线在车辆宽度方向偏移距离δd。在图5中对偏移了的路径线标注附图标记“60”来示出。并且,显示控制部36在车辆宽度方向偏移了距离δd的路径线60上配置多个引导车辆的行驶路径的内容62。其中,在本实施方式中,使用了使矩形状的图形在该图形的长度方向中间部向车辆的行驶路径的引导方向弯曲了的形状的图形作为内容62。
42.在步骤116中,显示控制部36将配置于偏移了的路径线60上的各个内容62的坐标值变换为针对hud12的显示坐标系的坐标值,基于变换后的坐标值来使hud12显示各个内容62。由此,如图6所示,投影于挡风玻璃18的内容62被显示为从乘员观察而相对于本车辆所行驶的车道不偏离。
43.若结束步骤116的处理,则返回至步骤100,在步骤100的判定为肯定的期间,反复进行步骤104~步骤116。由此,即便距离δd发生了变化,也能够追随距离δd的变化而使内容62无偏离地显示。
44.如上述那样,在本实施方式中,显示控制ecu22作为下述的显示控制部36发挥功能:当使导航用的地图信息所包括的路径线信息所表示的路径线根据车辆的位置与路径线的沿着车辆宽度方向的距离而在车辆宽度方向偏移时,使内容62显示在hud12中的与偏移后的路径线上对应的位置。由此,可抑制内容62被显示为位置相对于正行驶的车道在车辆宽度方向偏离,能够使引导车辆的行驶路径的内容62的美观度提高。
45.另外,在本实施方式中,显示控制部36基于由方位传感器56检测出的车辆的方位来确定车辆宽度方向。由此,能够高精度地确定车辆宽度方向。
46.另外,在本实施方式中,显示控制部36使用车辆内的乘员的视点的位置作为车辆的位置。由此,可抑制内容62被显示为从乘员观察而位置相对于正行驶的车道在车辆宽度方向偏离,能够使从乘员观察的内容62的美观度进一步提高。
47.另外,在本实施方式中,使用hud12作为显示装置。根据本公开,由于可以抑制内容被显示为位置相对于正行驶的车道在车辆宽度方向偏离,所以能够使hud12作为ar-hud发挥功能。
48.此外,在上述的实施方式中,对使用了使矩形状的图形在该图形的长度方向中间部向车辆的行驶路径的引导方向屈曲了的形状的图形作为引导车辆的行驶路径的内容62的方式进行了说明。然而,内容62并不限定于上述的形状,例如也可以为三角形状等。
49.另外,在上述对应用了hud12作为本公开的显示装置的方式进行了说明,但显示装置并不限定于hud12,例如也可以是车辆的仪表显示器等。
50.另外,在上述对于本公开所涉及的显示控制程序34被预先存储(安装)于存储部28的方式进行了说明,但本公开所涉及的显示控制程序还能够以记录于hdd、ssd、dvd等非暂时性记录介质的方式来提供。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。