1.本发明涉及医疗器械技术领域,具体涉及一种手柄、定位结构件及医用装置。
背景技术:
2.介入治疗手术是近年来研发的一种全新的治疗技术,是一种微创伤手术治疗法。介入治疗是在医学影像设备的引导下通过输送器将特制的医疗器械引入人体,对体内病变进行诊断和局部治疗。介入治疗无需开刀,相较于传统外科手术,其具有创伤小、恢复快、效果好等优势。介入治疗手术可用于治疗心脏瓣膜病,也可以用于治疗其他疾病,根据具体疾病的不同,所述医疗器械也有所不同,例如针对心脏瓣膜病,医疗器械是人工瓣膜,针对血管疾病,医疗器械可以是医用支架等。
3.输送器通常包括手柄和导管组件,导管组件用于装载医疗器械并包括移动管,手柄用于与导管组件连接并对移动管进行控制,以使医疗器械能够被引入人体。手柄作为整个介入手术过程中动力源,其需要保证足够的安全性、有效性和经济性。在介入手术的不同阶段对手柄的操作有不同的需求,因此手柄需要集合多种功能,而为了追求手柄的结构精简,手柄的某一个部件通常集合多种功能,导致手柄的装配复杂,且当一个部件发生故障时,可能会对与该部件直接相连的其他多个部件的功能产生不利影响,以及目前的手柄结构加工工艺要求高,增加了加工难度和成本。
技术实现要素:
4.本发明的目的在于提供一种手柄、定位结构件及医用装置,该定位结构件装配于手柄之壳体中,有利于简化手柄的整体装配工艺,并提升手柄的性能。
5.为实现上述目的,本发明提供了一种手柄,包括:
6.壳体;
7.定位结构件,至少部分地设置于所述壳体的内部,所述定位结构件具有第一内腔,且所述定位结构件包括定位座和支撑臂,所述定位座与所述壳体连接,所述支撑臂连接于所述定位座,所述支撑臂为所述第一内腔的部分侧壁,且所述支撑臂沿所述第一内腔的轴向延伸;以及,
8.移动机构,至少部分地穿设在所述第一内腔中,并被配置为能够沿所述第一内腔的轴向移动。
9.可选地,所述支撑臂包括至少两个子支撑臂,至少两个所述子支撑臂沿所述定位座的周向间隔地布置,并使相邻两个所述子支撑臂之间形成退让槽;
10.所述手柄还包括驱动部,所述驱动部连接于所述壳体上;所述移动机构包括移动杆和设置于所述移动杆上的传动部,所述移动杆至少部分地穿设于所述第一内腔中,所述传动部穿过所述退让槽并与所述驱动部传动连接。
11.可选地,至少两个所述子支撑臂沿所述定位座的周向中心对称或轴对称布置。
12.可选地,所述驱动部上设有第一传动螺纹;所述移动杆的部分外表面上设有第二
传动螺纹,所述第二传动螺纹构成所述传动部,并与所述第一传动螺纹啮合。
13.可选地,所述壳体包括主壳体和盖体,所述驱动部的远端与所述主壳体的近端可转动地连接,所述驱动部的近端与所述盖体可转动地连接。
14.可选地,所述定位座包括第一子定位座和第二子定位座,所述第一子定位座连接于所述支撑臂的远端,并与所述主壳体连接,所述第二子定位座连接于所述支撑臂的近端,并与所述盖体连接。
15.可选地,在所述第一子定位座的横截面上,所述第一内腔包括中心区和退让区,所述中心区用于供所述移动杆穿过,所述退让区与所述中心区连通,并用于供所述传动部穿过。
16.可选地,在所述定位结构件的径向上,所述第一子定位座的外表面凸出于所述支撑臂的外表面。
17.可选地,所述第一子定位座被配置为与所述主壳体保持周向相对静止。
18.可选地,所述盖体上设有中心通孔;所述第二子定位座包括第一座体和第二座体,所述第一座体与所述支撑臂连接,所述第二座体连接于所述第一座体的近端,且所述第二座体的横截面的面积小于所述第一座体的近端的端面面积;所述第二座体穿过所述中心通孔。
19.可选地,所述第二子定位座被配置为与所述盖体保持周向相对静止。
20.可选地,所述第一内腔的远端为第一开口端,所述第一内腔的近端为第二开口端或封闭端。
21.可选地,所述定位座和/或所述支撑臂上还设有减重结构。
22.为实现上述目的,本发明还提供了一种定位结构件,所述定位结构件是如前任一项所述的定位结构件。
23.为实现上述目的,本发明还提供了一种医用装置,包括导管组件和如前任一项所述的手柄,所述导管组件包括移动管,所述手柄设置于所述导管组件的近端,并与所述移动管连接,且用于控制所述移动管做轴向移动。
24.可选地,所述移动机构具有沿其轴向贯通地延伸的第二内腔;所述导管组件包括内管和外管,所述外管套装在所述内管的外部,且所述外管为所述移动管,所述外管与所述移动机构的远端连接,所述内管的近端从所述外管中穿出,并还穿过所述第二内腔。
25.与现有技术相比,本发明的手柄、定位结构件及医用装置具有如下优点:
26.前述的手柄包括壳体、定位结构件和移动机构,所述定位机构件至少部分地设置于所述壳体的内部,所述定位结构件具有第一内腔;所述定位结构件包括定位座和支撑臂,所述定位座与所述壳体连接,所述支撑臂连接于所述定位座上且可为所述第一内腔的部分侧壁,且所述支撑臂沿所述第一内腔的轴向延伸;所述移动机构至少部分地穿设在所述第一内腔中,并被配置为能够沿所述第一内腔的轴向移动。也就是说,在组装所述手柄时,所述移动机构通过所述定位结构件在所述壳体内进行定位和支撑,简化了各部件之间的装配逻辑关系,降低了各部件彼此之间干扰,提高了使用安全性且还有利于简化所述手柄的整体装配工艺,更便于加工。
27.进一步地,所述支撑臂包括至少两个子支撑臂,至少两个子支撑臂沿所述定位座的周向间隔布置,优选均匀布置,且相邻两个所述子支撑臂之间形成退让槽;所述手柄还包
括驱动部,所述驱动部连接于所述壳体上;所述移动机构包括移动杆和设置于所述移动杆上的传动部,所述移动杆至少部分地穿设于所述第一内腔中,所述传动部穿过所述退让槽并与所述驱动部传动连接,这样做,一方面为所述移动机构与所述驱动部的装配提供空间,另一方面相邻两个所述子支撑臂还能够为所述移动机构提供周向及径向限位,避免所述移动机构发生晃动或移位,提高传动的稳定性,改善手柄的使用性能。
附图说明
28.附图用于更好地理解本发明,不构成对本发明的不当限定。其中:
29.图1是本发明根据一实施例所提供手柄的整体外观结构示意图;
30.图2是本发明根据一实施例所提供的手柄的结构示意图,图中示出手柄的内部结构;
31.图3是本发明根据一实施例所提供的手柄的定位结构件的结构示意图;
32.图4是本发明根据一实施例所提供的手柄之壳体的盖体的结构示意图;
33.图5是本发明根据一替代性的实施例所提供的手柄的定位结构件的结构示意图,图示中第二子定位座上未形成第一座体和第二座体;
34.图6是本发明根据一实施例所提供的手柄的定位结构件与移动机构装配时的结构示意图;
35.图7是本发明根据一实施例所提供的手柄的定位结构件与移动机构装配时的结构示意图,图7的观察方位与图6不同;
36.图8是本发明根据一实施例所提供的手柄的定位结构件的第一子定位座的结构示意图;
37.图9是本发明根据一替代性的实施例所提供的手柄的定位结构件的结构示意图,图示中第一子定位座的外周面到定位结构件的轴线的距离等于支撑臂的外周面到定位结构件的轴线的距离;
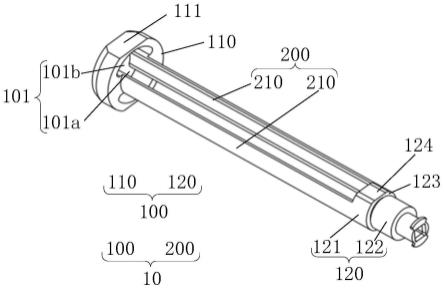
38.图10是本发明根据一实施例所提供的医用装置的结构示意图。
39.[附图标记说明如下]:
[0040]
10-定位结构件,100-定位座,101-第一内腔,101a-中心区,101b-退让区,110-第一子定位座,111-第一平面,120-第二子定位座,121-第一座体,122-第二座体,123-台阶面,124-第二平面;200-支撑臂,210-子支撑臂,201-退让槽;
[0041]
30-壳体,310-主壳体,320-盖体,321-中心通孔,322-第二安装槽,323-限位平面,324-凸出部;
[0042]
40-移动机构,410-移动杆,420-传动部,430-过渡管,440-第二内腔;
[0043]
50-驱动部,510-驱动部本体,520-螺纹套,521-第一传动螺纹;60-导管组件,610-内管,620-外管。
具体实施方式
[0044]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离
本发明的精神下进行各种修饰或改变。需要说明的是,本实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
[0045]
另外,以下说明内容的各个实施例分别具有一或多个技术特征,然此并不意味着使用本发明者必需同时实施任一实施例中的所有技术特征,或仅能分开实施不同实施例中的一部或全部技术特征。换句话说,在实施为可能的前提下,本领域技术人员可依据本发明的公开内容,并视设计规范或实作需求,选择性地实施任一实施例中部分或全部的技术特征,或者选择性地实施多个实施例中部分或全部的技术特征的组合,借此增加本发明实施时的弹性。
[0046]
如在本说明书中所使用的,单数形式“一”、“一个”以及“该”包括复数对象,复数形式“多个”包括两个以上的对象,除非内容另外明确指出外。如在本说明书中所使用的,术语“或”通常是以包括“和/或”的含义而进行使用的,除非内容另外明确指出外,以及术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。可以是机械连接,可以是抵接,也可以是电连接。可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0047]
本发明的核心思想在于提供一种手柄,所述手柄包括壳体、定位结构件和移动机构。其中所述定位结构件至少部分地设置于所述壳体的内部,且所述定位结构件具有第一内腔。所述定位结构件包括定位座和支撑臂,所述定位座与所述壳体连接,所述支撑臂连接于所述定位座上,所述支撑臂为所述第一内腔的部分侧壁,且所述支撑臂沿所述第一内腔的轴向延伸;所述移动机构至少部分地穿设在所述第一内腔中,并被配置为能够沿所述第一内腔的轴向移动。在组装所述手柄时,所述移动机构通过所述定位结构件在所述壳体内进行定位和支撑,简化了各部件之间的装配逻辑关系,降低各部件彼此之间的干扰,提高了使用安全性,且还有利于简化所述手柄的整体装配工艺,更便于加工。
[0048]
所述手柄用于一医用装置。所述医用装置包括所述手柄和导管组件,所述导管组件用于装载医用植入物,所述医用植入物包括但不限于医用支架、心脏瓣膜假体、栓塞弹簧圈等。所述导管组件包括内管和套装在所述内管之外部的外管,且所述内管和所述外管中的一个作为移动管。所述手柄连接于所述导管组件的近端,且所述移动机构与所述移动管的近端连接,以使所述手柄可以控制所述移动管做轴向运动,并实现所述医用植入物的释放。举例来说,当所述内管作为所述移动管时,所述手柄控制所述内管沿近端向远端的方向移动,可以实现所述医用植入物的释放,当所述外管作为所述移动管时,所述手柄控制所述外管沿远端向近端的方向移动,可以实现所述医用植入物的释放。
[0049]
需要说明的是,本文中,术语“近端”、“远端”是从使用所述医用装置的医生角度来看相对于彼此的元件或动作的相对方位、相对位置、方向,尽管“近端”、“远端”并非是限制性的,但是“近端”通常指所述医用装置在正常操作过程中靠近医生的一端,而“远端”通常是指首先进入患者体内的一端。
[0050]
为使本发明的目的、优点和特征更加清楚,以下结合附图对本发明作进一步详细说明。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰
地辅助说明本发明实施例的目的。附图中相同或相似的附图标记代表相同或相似的部件。
[0051]
图1是本发明一实施例所提供的手柄的结构示意图,图2示出了所述手柄的内部结构示意图。
[0052]
请参考图1及图2,所述手柄包括定位结构件10、壳体30和移动机构40。其中,请重点参考图2并结合图3,所述定位结构件10至少部分地设置于所述壳体30的内部,并具有第一内腔101。所述第一内腔101在第一方向上延伸,并可贯通所述定位结构件10,也即所述第一内腔101的远端和近端均为开口端,分别为第一开口端和第二开口端,所述第一方向例如是所述壳体30的轴向,替代性地,所述第一内腔101的近端也可以是封闭端。所述定结构件10包括定位座100和支撑臂200,所述定位座100与所述壳体30连接。所述支撑臂200连接于所述定位座100上,所述支撑臂200为所述第一内腔101的部分侧壁,且所述支撑臂200沿所述第一内腔101的轴向延伸。所述第一内腔101的轴向即为所述第一方向。所述移动机构40至少部分地穿设在所述第一内腔101中,并被配置为能够沿所述第一内腔101的轴向移动。也就是说,在装配所述手柄时,所述移动机构40通过所述定位结构件10在所述壳体30的内部进行定位和支撑,简化了所述定位结构件10与其他结构件之间的装配逻辑关系,降低了各个部件彼此之间的干扰,提高了使用安全性,还有利于简化所述手柄的装配程序和工艺,更便于加工。
[0053]
更为详细地,请参考图3,所述定位座100包括第一子定位座110和第二子定位座120,所述第一子定位座110和所述第二子定位座120分别连接于所述支撑臂200的两端上,且所述第一子定位座110和所述第二子定位座120分别连接于所述壳体30上(具体的连接方式将在后文中介绍)。相应地,所述第一内腔101包括相互连通的三部分,其一部分设置于所述第一子定位座110上,另一部贯穿所述支撑臂200,再一部分设置于所述第二定位座120上。以及,所述支撑臂200包括至少两个子支撑臂210,至少两个所述子支撑臂210沿所述定位座100的周向间隔布置,如此相邻两个所述子支撑臂210之间形成沿轴向延伸并还与所述第一内腔101相连通的退让槽201,所述退让槽201的数量与所述子支撑臂210的数量相同,即所述退让槽201的数量为至少两个。
[0054]
本发明实施例中,优选所述定位座100(包括所述第一子定位座110和所述第二子定位座120)以及所述支撑臂200(包括所有所述子支撑臂210)一体成型,以提高所述定位结构件的整体刚度。所述定位结构件10可选用的材料包括高分子材料或金属材料,可用的高分子材料包括但不限于abs树脂(丙烯腈-丁二烯-苯乙烯共聚物)、pc(聚碳酸酯)、pom(聚甲醛树脂)、pe i(聚醚酰亚胺)、psu(聚砜)、ppsu(聚亚苯基砜树脂)、peek(聚醚醚酮)的至少一种,可用的金属材料包括但不限于铁、铬、锰及其合金等。另外,所述定位座100和/或所述支撑臂200上还可以设置减重结构(图中未示出),以减小所述定位结构件10的重量,进而减小所述手柄的重量,所述减重结构例如是孔或其他镂空结构。
[0055]
请参考图2并结合图4,所述壳体30包括主壳体310和盖体320,所述盖体320可设置在所述主壳体310的近端。所述主壳体310的内壁上设有第一安装槽(图中未示出),所述盖体320上设有中心通孔321,且所述盖体320的远端端面上设有第二安装槽322,所述第二安装槽322与所述中心通孔321连通。所述第一子定位座110连接于所述支撑臂200的远端,并还安装于所述第一安装槽中。所述第二子定位座120包括第一座体121和第二座体122,其中所述第一座体121连接于所述支撑臂200的近端,所述第二座体122连接于所述第一座体121
的近端,且所述第二座体122的横截面的面积小于所述第一座体121之近端端面的面积,以使所述第一座体121的近端端面的部分区域未被所述第二座体122覆盖而形成台阶面123。所述第二座体122穿过所述盖体320上的所述中心通孔321,并使所述第一座体121至少部分地插入所述第二安装槽322的内部,此时所述盖体320的远端端面压抵所述台阶面123。
[0056]
进一步地,所述盖体320和所述第二子定位座120之间还可以通过一固定件保持轴向相对静止,以阻止所述盖体320从所述第二座体122的近端脱出,所述固定件例如是螺母(此时所述第二座体122上形成有联结螺纹)。此外,还可以理解的是,所述第二子定位座120可不区分为第一座体和第二座体(如图5所示),此种情况下,可通过其他方式实现所述第二子定位座120与所述盖体320的连接,例如所述第二子定位座120至少部分地插入所述第二安装槽322,并与所述第二安装槽322的侧壁胶接。另外,所述盖体320的远端端面上可设置一突出部324,所述第二安装槽324可设于所述突出部324上。
[0057]
优选地,所述第一子定位座110还被配置为与所述主壳体310保持周向相对静止。为实现此目的,如图3及图5所示,所述第一子定位座110可具有非回转的外形,也即所述第一子定位座110的横截面为非圆形的形状,例如所述第一子定位座110的外周面的一部分区域形成为第一平面111。所述第一安装槽的横截面的形状及尺寸与所述第一子定位座110的横截面的形状及尺寸相匹配。所述第一子定位座110的外周面是指所述第一子定位座110的平行于所述定位座100的轴线的外表面。
[0058]
以及,所述第二子定位座120被配置为与所述盖体320保持周向相对静止。在一种实现方式中,如图4所示,所述第二安装槽322的横截面具有非圆形的形状,例如所述第二安装槽322的部分侧壁形成为限位平面323。并且如图3所示,所述第一座体121至少部分地插入所述第二安装槽322,且所述第一座体121插入所述第二安装槽322的部分的横截面的形状、尺寸与所述第二安装槽322的横截面的形状、尺寸相匹配,也就是说,所述第一座体121的外周面的一部分区域形成为于所述限位平面323相匹配的第二平面124。所述第一座体121的外周面是指所述第一座体121的平行于所述定位座100的轴线的外表面。
[0059]
请返回参考图1及图2,所述手柄还包括驱动部50,所述驱动部50设置于所述壳体30上,并用于驱使所述移动机构40沿所述壳体30的轴向移动。
[0060]
可选地,请继续参考图1及图2,所述驱动部50为手动驱动机构,并可转动地连接于所述壳体30上。详细来说,所述主壳体310与所述盖体320不直接连接,所述驱动部50覆盖所述支撑臂200,且所述驱动部50的远端可转动地连接于所述主壳体310的近端,以及所述驱动部50的近端可转动地连接于所述盖体320的远端。
[0061]
所述移动机构40包括移动杆410和设置于所述移动杆410上的传动部420,所述移动杆410至少部分地穿设于所述第一内腔101中。所述传动部420穿过相邻两个所述子支撑臂210之间的所述退让槽201,并与所述驱动部50连接,以使得所述驱动部50能够经由所述传动部420传动,进而驱使所述移动机构40相对于所述定位结构件10做轴向移动。
[0062]
请继续参考图2,并结合图6及图7,所述驱动部50上设有第一传动螺纹521,具体地,所述驱动部50优选包括驱动部本体510和连接于所述驱动部本体510之内表面的螺纹套520,所述螺纹套520的内表面上设有所述第一传动螺纹521。所述移动机构40之移动杆410的外表面设有第二传动螺纹,所述第二传动螺纹与所述第一传动螺纹430啮合,以进行螺旋传动。也就是说,所述第二传动螺纹形成所述传动部420,且相邻两个所述子支撑臂210之间
的所述退让槽201为所述驱动部50与所述传动部420的连接提供了空间,并且所述退让槽201还对所述移动机构40进行周向和径向上的限位,避免所述移动机构40发生晃动或移位,使得所述移动机构40沿轴向稳定地移动。可以理解,由于所述第二传动螺纹需要穿过所述退让槽201,因此所述第二传动螺纹不在所述移动杆的周向上连续的延伸,而是包括多个沿所述移动杆410的周向间隔布置的螺纹段,且一个所述螺纹段穿过一个所述退让槽201。
[0063]
进一步优选地,至少两个所述子支撑臂210沿所述定位座100的周向中心对称或轴对称地布置,且每个所述退让槽201用于供所述第二传动螺纹的一个螺纹段穿过,如此,可以提高所述定位结构件10的受力均衡性。
[0064]
进一步优选地,如图3、图5及图8所示,在所述第一子定位座110的横截面上,所述第一内腔101包括中心区101a和至少一个退让区101b,至少一个所述退让区101b与所述中心区101a连通,并且在所述第一子定位座110的周向上,每个所述退让区101b位于相邻两个所述子支撑臂210之间,以使所述退让区101b与所述退让槽201对应设置。所述中心区101a的形状、尺寸与所述移动杆410的横截面的形状、尺寸相匹配,以允许所述移动杆410穿过。每个所述退让区101b的形状、尺寸与所述第二传动螺纹之螺纹段的形状、尺寸相匹配,以允许所述螺纹段穿过。这样做的目的是方便装配所述定位结构件与所述移动机构40,且可以进一步地对所述移动机构40进行周向及径向限位。在替代性的实施例中,所述第一内腔在所述第一子定位座110的横截面上也可以不区分所述中心区和所述退让区,而仅为一个圆形(如图9所示),供移动杆410穿过。
[0065]
请返回参考图2,并结合图3及图5,本实施例中,所述壳体30的最大内径可以与所述驱动部本体510的内径相等。在此,所述第一子定位座110的外周面到所述定位座100的轴线的距离应大于所述子支撑臂210的外周面到所述定位座100的轴线的距离,也即,在所述定位结构件10的径向上,所述第一子定位座110凸出于所述子支撑臂210(如图3及图5所示),从而为所述螺纹套520提供安装空间。所述子支撑臂210的外周面是指所述子支撑臂210的围绕所述定位座100的轴线的外表面。在一替代性的实施例中,所述第一子定位座21的外周面到所述定位座100的轴线的距离也可以等于所述子支撑臂210的外周面到所述定位座100的轴线的距离(如图9所示),实践中可以根据所述壳体30以及其他部件的形状、尺寸及装配关系进行合理设置。
[0066]
此外,本发明实施例还提供了一种定位结构件,所述定位结构件为前述的定位结构件20。
[0067]
以及,本发明实施例还提供了一种医用装置,如图10所示,所述医用装置包括导管组件60和前述的手柄,所述导管组件60包括移动管,所述移动管的近端与所述移动机构40的远端连接。当所述移动机构40沿所述定位结构件的轴向移动时,带动所述移动管沿所述定位结构件的轴向移动。
[0068]
具体地,所述导管组件60包括内管610和套装于所述内管610之外部的外管620(如图2所标注),所述内管610与所述外管620中的一者为所述移动管。另外,当所述外管620为所述移动管时,所述移动机构40还包括过渡管430,所述过渡管430的远端与所述外管的近端连接,所述过渡管430的近端与所述移动杆410的远端连接。不仅如此,所述移动杆410还具有轴向贯通地延伸的第二内腔440,所述第二内腔440与所述外管620连通。所述内管的近端从所述外管的近端穿出后还穿过所述第二内腔440,当所述第一内腔101沿所述第一方向
贯通地延伸时,所述内管的近端还进一步沿所述第一内腔101贯穿所述第二子定位座120,以与其他机构连接,所述其他机构根据实际情况设置。替代性地,当所述第一内腔101的近端为封闭端时,所述内管的近端可与所述第一内腔101的近端腔壁固定连接。
[0069]
接下去以所述外管620为所述移动管介绍所述医用装置的使用方法。
[0070]
首先,将所述医用植入物装载于所述导管组件600中。具体地,所述医用植入物套装在所述内管610上,并被所述外管620压缩。
[0071]
然后通过所述医用装置将所述医用植入物输送至患者体内的目标位置。
[0072]
接着,通过操作所述手柄上的所述驱动部50,驱使所述外管620沿远端向近端的方向移动,并释放所述医用植入物。
[0073]
之后,再次操作所述驱动部50以驱使所述外管620沿近端向远端的方向移动,以使所述外管620和所述内管610闭合(此时所述内管610的远端重新回到所述外管620的内部)。
[0074]
最后,将所述医用装置整体移出至患者的体外。
[0075]
虽然本发明披露如上,但并不局限于此。本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
