1.本发明涉及一种超声和光声的多模态高分辨率三维扫描成像装置。
背景技术:
2.生物组织结构复杂,其主要成分由非有机基质和有机基质组成。当组织发生病变时,其物理结构特性发生改变,并且生化指标也将发生不同程度变化。因此无创获取组织的物理结构和生化指标信息,进行成像、融合分析和预警,对于疾病早期诊断和治疗具有非常重要的临床意义。
3.目前医疗机构广泛使用基于x光的ct扫描成像方法诊断骨组织物理结构特性,主要通过成像表征骨组织密度作为诊断参数,但该方法无法有效获取组织中胶原蛋白、血红蛋白及脂质含量及分布等生化指标信息,成像非实时,重建时间长,并且具有辐射,不适用于各年龄人群诊断和随访。
4.目前医疗机构广泛使用的超声成像方法可以有效获取生物组织的物理结构特性,通过超声多普勒成像方法还可以获取心肺等器官中血流信息,但上述超声方法无法有效针对同时提供组织的物理结构信息及所含生化指标信息。
5.研究表明生物组织具有光吸收特性和光声效应,通过对各组织发射不同谱段激光,可通过获取和分析光声信号,表征的组织的生化指标含量。但仅通过光声单一成像方法仍然难以实现对组织的物理结构特性和生化成分含量及分布有效表征。
技术实现要素:
6.为解决上述问题,提供一种超声和光声的多模态高分辨率三维扫描成像装置,本发明采用了如下技术方案:
7.本发明提供了一种超声和光声的多模态高分辨率三维扫描成像装置,其特征在于,包括:扫描装置以及成像装置,扫描装置具有:样本容器,用于承载待测生物组织。检测光纤,用于将激光信号进行传输到待测生物组织,激励待测生物组织产生光声信号。超声换能器,用于将超声波信号输出到待测生物组织上,使得待测生物组织响应并产生响应超声波信号,并采集光声信号以及响应超声波信号。三维移动机构,用于对检测光纤和超声换能器进行移动从而使得检测光纤和超声换能器对待测生物组织进行检测。三维控制模块,用于控制三维移动机构移动。成像装置包括:信号输出采集模块,用于产生激光信号以及控制超声换能器采集光声信号和响应超声波信号。协同处理模块,用于对光声信号和响应超声波信号进行数据处理,得到用于进行图像重建和图像融合分析的多模态数据。三维移动机构包括:底座,样本容器可转动地安装在底座上。转动驱动电机,设置在底座上,该转动驱动电机的输出端与样本容器的底部相连接。支撑臂,一端竖直地安装在底座上。升降臂,可竖直移动地安装在支撑臂上,位于样品容器开口的上方。升降驱动机构,驱动升降臂进行竖直移动。第一移动臂,包括横部和竖直部,横部可移动地安装在升降臂上,竖直部一端与横部连接,另一端向下延伸至样品容器内并安装超声换能器。第二移动臂,一端可移动地安装在
升降臂上,检测光纤固定在第二移动臂的另一端,并延伸至样品容器内。
8.本发明提供的一种超声和光声的多模态高分辨率三维扫描成像装置,还可以具有这样的技术特征,其中,检测光纤的远离第二移动臂的一端与信号输出采集模块相连接,超声换能器与信号输出采集模块电连接,协同处理模块与信号输出采集模块电连接,控制信号输出采集模块发射激光信号,通过检测光纤将激光信号传输到待测生物组织上,让待测生物组织激励从而产生光声信号,超声换能器采集光声信号,并通过信号输出采集模块将光声信号传输到协同处理模块,当光声信号到达协同处理模块后,协同处理模块向信号输出采集模块发射控制信号,信号输出采集模块接收控制信号后,控制超声换能器发射超声波信号到待测生物组织,让待测生物组织响应并产生响应超声波信号,超声换能器采集响应超声波信号,并通过信号输出采集模块将响应超声波信号传输到协同处理模块,协同处理模块对光声信号和响应超声波信号进行处理,得到多模态数据。
9.本发明提供的一种超声和光声的多模态高分辨率三维扫描成像装置,还可以具有这样的技术特征,其中,成像装置还包括成像重建模块,成像重建模块与协同处理模块电连接,用于对多模态数据进行实时图像重建和图像融合分析。
10.本发明提供的一种超声和光声的多模态高分辨率三维扫描成像装置,还可以具有这样的技术特征,其中,扫描装置还包括监控摄像头,监控摄像头安装在升降臂远离支撑臂的一端,监控摄像头与协同处理模块电连接,协同处理模块控制监控摄像头对扫描装置的状态进行实时监控。
11.本发明提供的一种超声和光声的多模态高分辨率三维扫描成像装置,还可以具有这样的技术特征,其中,三维移动机构还包括第一驱动机构和第二驱动机构,第一驱动机构驱动第一移动臂在升降臂上进行水平移动,第二驱动机构驱动第二移动臂在升降臂上进行水平移动。
12.本发明提供的一种超声和光声的多模态高分辨率三维扫描成像装置,还可以具有这样的技术特征,其中,超声波的频带范围为0.5mhz~50.0mhz。
13.本发明提供的一种超声和光声的多模态高分辨率三维扫描成像装置,还可以具有这样的技术特征,其中,扩束激光的波长范围为405nm~2600nm,输出强度小于20mj/cm2。
14.发明作用与效果
15.根据本发明的一种超声和光声的多模态高分辨率三维扫描成像装置。本发明通过对待测生物组织发射多频段超声脉冲和多谱段激光脉冲,采用多阵元高分辨率采集并分析处理各组织的多模态响应信号进行重建及融合成像,实现对组织的物理结构实时成像同时显示其中生化指标含量及分布情况,输出响应时间短,反应快,成像速率高。
16.其次,本发明通过三维移动机构实现对待测生物组织的x、y、z方向的多模信号进行三维图像重建,通过内置的智能图像分析算法,即可完成组织的物理结构成像以及获取组织中生化指标及其分布等信息。本发明应用于医疗健康领域,可应用于高分辨率颅脑成像、肌骨成像、康复监测等领域,为相关疾病诊断提供重要数据,用于解决现有技术中实时无创监测及诊断生物组织疾病困难的问题。
附图说明
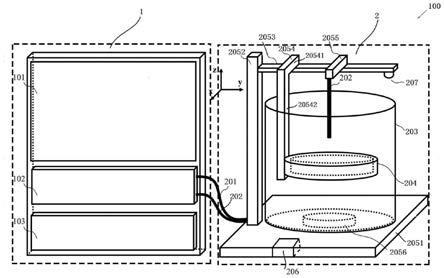
17.图1是本发明实施例中的超声和光声的多模态高分辨率三维扫描成像装置结构示
意图;
18.图2是本发明实施例中的超声和光声的多模态高分辨率三维扫描成像装置信号控制示意图。
具体实施方式
19.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下结合实施例及附图对本发明的一种超声和光声的多模态高分辨率三维扫描成像装置作具体阐述。
20.《实施例》
21.图1是本发明实施例中的超声和光声的多模态高分辨率三维扫描成像装置结构示意图;图2是本发明实施例中的超声和光声的多模态高分辨率三维扫描成像装置信号控制示意图。
22.如图1及图2所示,本实施例提供了超声和光声的多模态高分辨率三维扫描成像装置100包括包括成像装置1以及扫描装置2。
23.成像装置1包括协同处理模块101、信号输出采集模块102和成像重建模块103。
24.协同处理模块101与信号输出采集模块102和成像重建模块103电连接,用于对光声信号和响应超声波信号进行数据处理,得到用于进行图像重建和图像融合分析的多模态数据。
25.信号输出采集模块102通过电缆201与扫描装置2连接,用于产生激光信号以及控制超声换能器采集光声信号和响应超声波信号。
26.成像重建模块103与协同处理模块101电连接,用于对协同处理模块101处理得到的多模态数据进行实时图像重建和图像融合分析。
27.扫描装置2包括电缆201、检测光纤202、样本容器203、超声换能器204、三维移动机构205、三维控制模块206和监控摄像头207。
28.电缆201连接信号输出采集模块102和超声换能器203,用于进行信号传输。
29.检测光纤202一端连接在信号输出采集模块102,另一端固定在三维移动机构205上,用于将激光信号进行传输到待测生物组织,激励待测生物组织产生光声信号。
30.样本容器203放置在三维移动机构205上,用于承载待测生物组织。
31.超声换能器204通过电缆201与信号输出采集模块102相连接,控制超声换能器204向待测生物组织发射超声信号,让待测生物组织产生响应超声波信号,同时控制超声换能器204采集响应超声波信号。信号输出采集模块102与检测光纤202相连接,信号输出采集模块102产生激光,并通过检测光纤202传输到待测生物组织上,让待测生物组织激励从而产生光声信号,信号输出采集模块102控制超声换能器204采集光声信号。
32.本实施例中的超声换能器204采用的是1024阵元多频段超声换能器。
33.三维移动机构205与三维控制模块206电连接,用于对检测光纤202和超声换能器204进行移动从而使得检测光纤202和超声换能器204对待测生物组织进行检测。
34.三维移动机构205包括底座2051、支撑臂2052、升降臂2053、第一移动臂2054、第二移动臂2055、转动驱动电机2056、升降驱动机构(图中未示出)、第一驱动机构(图中未示出)和第二驱动机构(图中未示出)。
35.底座2051上可转动地安装样本容器203。转动驱动电机2056设置在底座2051上。
36.支撑臂2052一端竖直地安装在底座2051上。
37.升降臂2053可竖直移动地安装在支撑臂2052上,位于样品容器203开口的上方。
38.升降驱动机构(图中未示出)与三维控制模块206电连接,驱动升降臂2053在支撑臂2052上进行竖直移动,实现检测光纤202和超声换能器204在z轴上的移动。
39.第一移动臂2054包括横部20541和竖直部20542,横部20541可移动地安装在升降臂2053上,竖直部20542的一端与横部20541连接,另一端向下延伸至样品容器203内并安装超声换能器204。
40.第二移动臂2055的一端可移动地安装在升降臂2053上,检测光纤202固定在第二移动臂2055远离升降臂2053的另一端,并延伸至样品容器203内。
41.第一驱动机构与三维控制模块206电连接,驱动第一移动臂2054在升降臂2053上的水平移动。
42.第二驱动机构与三维控制模块206电连接,驱动第二移动臂2055在升降臂2053上的水平移动。
43.转动驱动电机2056的输出端与样本容器203的底部相连接,该转动驱动电机2056对样本容器203进行旋转驱动,实现检测光纤202和超声换能器204对样品容器203内的待测生物组织进行平面上的扫描。
44.三维控制模块206与协同处理模块101和三维移动机构205电连接,用于控制三维移动机构205移动。
45.监控摄像头207安装在升降臂2053远离支撑臂2052的一端,监控摄像头207与协同处理模块101电连接,协同处理模块101控制监控摄像头207对扫描装置2的状态进行实时监控。
46.本实施例中的多模态高分辨率三维扫描成像装置100的工作过程如下:三维控制模块206通过三维移动机构205控制检测光纤202和超声换能器204进行水平移动从而使得检测光纤202和超声换能器204对容纳在样本容器203内的待测生物组织进行检测,同时通过三维移动机构205对样本容器203进行旋转,从而实现对容纳在样本容器203内的待测生物组织的多模态高分辨率三维扫描。超声换能器204接收光声信号和响应超声波信号并通过信号输出采集模块102传输到协同处理模块101进行处理,得到多模态数据。将多模态数据传输到成像重建模块103进行实时图像重建和图像融合分析。
47.实施例作用与效果
48.根据本实施例提供的一种超声和光声的多模态高分辨率三维扫描成像装置。本实施例通过对待测生物组织发射多频段超声脉冲和多谱段激光脉冲,采用多阵元高分辨率采集并分析处理各组织的多模态响应信号进行重建及融合成像,实现对组织的物理结构实时成像同时显示其中生化指标含量及分布情况,输出响应时间短,反应快,成像速率高。
49.本发明通过三维移动机构实现对待测生物组织的x、y、z方向的多模信号进行图像重建,通过内置的智能图像分析算法,即可完成组织的物理结构成像以及获取组织中生化指标及其分布等信息。本实施例主要应用于医疗健康领域,可应用于高分辨率颅脑成像、肌骨成像、康复监测等领域,为相关疾病诊断提供重要数据,用于解决现有技术中实时无创监测及诊断生物组织疾病困难的问题。
50.上述实施例仅用于举例说明本发明的具体实施方式,而本发明不限于上述实施例的描述范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。