1.本发明涉及一种拖挂连接装置,其包括能在工作位置和静止位置之间移动的球颈,所述球颈具有设置在第一末端上的枢转支承体和设置在第二末端上的连接球部,所述拖挂连接装置还包括紧固在车辆上的枢转单元,所述枢转支承体借助该枢转单元能够枢转,以便围绕枢转轴线、尤其围绕紧固在车辆上的枢转轴线在工作位置和静止位置之间实施枢转运动,其中,所述枢转单元包括紧固在车辆上的枢转支承单元和阻转装置,所述阻转装置用于至少在工作位置中阻止枢转支承体围绕所述枢转轴线的枢转运动。
背景技术:
2.由现有技术已知这种类型的拖挂连接装置。
3.在这些拖挂连接装置中,枢转单元通常通过设置于该枢转单元之外的、例如设置在车辆侧的、尤其由供应商提供的枢转控制单元控制。
4.在这样的拖挂连接装置和枢转单元中,始终存在所述拖挂连接装置和枢转单元之间相互协调的问题和从中产生的易发故障的特点的问题。
技术实现要素:
5.因此,本发明的任务在于,避免出现开篇提到的类型的拖挂连接装置的易发故障的特点。
6.根据本发明,在开篇提到的类型的拖挂连接装置中,通过以下方式解决所述任务,即枢转控制单元集成在枢转单元中。
7.借助枢转控制单元在枢转单元中该种类型的集成,能够解决协调问题,并且同样能够简化拖挂连接装置在机动车上的装配。
8.一种优选的解决方案规定,枢转单元具有总壳体,枢转支承单元、阻转装置和驱动马达以及枢转控制单元设置在总壳体中,从而枢转单元自身能够自主实施所有的控制功能,并且因此仅须由车辆传送用于启动枢转运动的启动信号。
9.关于枢转控制单元的构造,可想到非常多样的可能性。
10.一种有利的解决方案规定,枢转控制单元借助于枢转运动传感器探测球颈围绕枢转轴线的枢转运动。
11.枢转运动传感器有绝对的测量性,并且因此提供了独立于此前的运行状态而在任何时间探测球颈位置的可能性。
12.借此,枢转控制单元能够精确地识别球颈的相对于机动车、工作位置、静止位置的位置。
13.借此能够特别有利地实现的是,枢转运动传感器探测枢转支承体围绕枢转轴线的枢转运动。
14.在此,枢转运动传感器可设置在枢转单元上,从而该枢转运动传感器直接探测枢转支承体的相对于枢转单元的、例如相对于枢转单元的总壳体的枢转位置。
15.另一有利的可能性规定,枢转支承体通过连接元件与枢转运动传感器共同作用。
16.关于枢转运动传感器的构造,可想到非常多样的可能性。
17.一种有利的解决方案规定,枢转运动传感器设置在传感器承载部上,该传感器承载部能够以合适的方式并且简单地设置、装配在总壳体中。
18.枢转单元的另一有利的实施方案规定,枢转控制单元借助于功能传感器探测阻转装置的功能。
19.阻转装置的这些功能尤其涉及阻转装置的阻转位置或者松开位置。
20.例如,功能传感器在此能够探测阻转装置的这些功能位置的一个或多个功能位置。
21.一种特别简单的解决方案规定,枢转控制单元借助于功能传感器探测阻转装置的至少一个位置,换而言之例如探测阻转位置或者松开位置。
22.对阻转装置的位置的所述探测例如能以如下方式进行,即枢转控制单元通过感测(abtasten)阻转装置的元件,来借助于功能传感器探测阻转装置的位置,其中,对阻转装置的元件的感测要么直接通过功能传感器进行、要么间接地通过配属给阻转装置的元件的装置进行。
23.当功能传感器设置在传感器承载部上并且借此能以简单的方式装配在总壳体中时,关于功能传感器的设置同样是有利的。
24.一种合目的的解决方案规定,枢转控制单元借助于转速传感器探测驱动马达的转速。
25.因此借助转速传感器能直接在驱动马达自身上识别该驱动马达在开动还是关停状态,而不视乎驱动马达的运转对枢转单元的功能有何种程度的影响。
26.在此特别有利的是,转速传感器配属给驱动马达的从动轴,从而有了关于驱动马达的功能的直接信息、尤其有了关于驱动马达的转速、转动方向的信息。
27.当转速传感器设置在传感器承载部上并且因此能够以简单的方式装配在枢转单元中时,同样证实转速传感器是特别有利的。
28.另一有利的解决方案规定,枢转控制单元借助于温度传感器探测枢转单元中的温度、尤其探测总壳体中的温度。
29.这例如允许枢转控制单元适配于探测到的与温度有关的参数,例如边界值和/或电流值和/或电流阈值。
30.温度传感器尤其同样设置在传感器承载部上。
31.为了简单地接触,传感器承载部以有利的方式设有插接接触元件。
32.一种特别紧凑的、关于探测必需参数的特别合目的的解决方案规定,总壳体具有容纳枢转支承单元、阻转单元和至少一个传动单元的枢转运行壳体部段,并且传感器承载部配属给枢转运行壳体部段。
33.该解决方案的巨大优势在于,要由传感器探测的数值借此能够以简单的方式并且尽可能近地在各个功能单元上得到探测。
34.一种特别有利的解决方式规定,传感器承载部设置在枢转运行壳体部段本身中。
35.一种在结构上特别有利的解决方案规定,传动单元具有分配传动机构,该分配传动机构在从动侧一方面驱动枢转支承体、另一方面驱动阻转装置。
36.借此以简单的方式产生如下可能性,即借助单独的驱动马达,不仅驱动枢转支承体和实施枢转运动,还操控阻转装置,使得该阻转装置要么去到阻转位置、要么去到松开位置。
37.尤其在该情形中规定,传动单元具有分配传动机构,该分配传动机构在从动侧一方面驱动枢转支承体、另一方面驱动阻转装置,并且传感器承载部中的至少一个传感器承载部设置在分配传动机构的驱动侧。
38.在此,传感器承载部可直接设置在分配传动机构的驱动侧。
39.而通过降速传动机构来驱动分配传动机构,并且传感器承载部中的至少一个传感器承载部配属给降速传动机构,从而在降速传动机构的区域中可将传感器中的至少一个传感器设置在运动中的元件的紧邻的近处,这是更加有利的。
40.更加有益的是,降速传动机构具有驱动侧的传动元件和从动侧的传动元件,并且传感器承载部中的至少一个传感器承载部设置在驱动侧的传动元件和从动侧的传动元件之间。
41.一种关于其紧凑性的特别有益的解决方案规定,传感器群中的多个传感器、包括枢转运动传感器、功能传感器、转速传感器和温度传感器设置在共同的传感器承载部上,从而能在枢转系统中局地集中地获取由各传感器得出的信息。
42.此外优选地规定,传感器承载部包括用于接触设置在传感器承载部上的组件的插接接触元件、例如用于接触传感器的插接接触元件。
43.一种特别有益的解决方案规定,总壳体具有容纳枢转支承单元、阻转单元和至少一个传动单元的枢转运行壳体部段,并且枢转控制单元配属给枢转运行壳体部段,换而言之,整个的枢转控制单元都要被这样配属。
44.尤其借此能有利地实现的是,枢转控制单元设置在枢转运行壳体部段中。
45.此外优选地规定,传动单元具有分配传动机构,分配传动机构在从动侧一方面驱动枢转支承体、另一方面驱动阻转装置,并且枢转控制单元设置在分配传动机构的驱动侧,从而对于枢转控制单元的功能而言必需的信息尤其能够在枢转控制单元的空间上紧邻的环境中得到探测。
46.特别合目的的是,通过降速传动机构来驱动分配传动机构,并且枢转控制单元配属给降速传动机构。
47.尤其规定,降速传动机构具有驱动侧的传动元件和从动侧的传动元件,并且枢转控制单元设置在驱动侧的传动元件和从动侧的传动元件之间。
48.一种备选的解决方案对此规定,总壳体具有马达壳体部段,马达壳体部段具有驱动马达,并且枢转控制单元配属给马达壳体部段。
49.而在根据本发明的解决方案的框架内同样存在如下可能性,将枢转控制单元分为各子单元,并且将枢转控制单元的一个部分设置在枢转运行壳体部段中,并且将枢转控制单元的另一部分设置在马达壳体部段中。
50.另一有利的解决方案规定,枢转控制单元设置在马达壳体部段中。
51.另一有利的实施方案规定,枢转单元具有总壳体,枢转支承单元和驱动马达设置在该总壳体中,并且枢转控制单元的设置在电路板上的控制电路设置在总壳体中。
52.以合目的的方式构造总壳体,使得它具有容纳枢转支承单元和至少一个传动单元
的枢转运行壳体部段,并且枢转控制单元的设置在电路板上的控制电路配属给枢转运行壳体部段。
53.此外有利地规定,枢转控制单元的设置在电路板上的控制电路设置在枢转运行壳体部段中。
54.一种特别有利的实施方案规定,传动单元具有分配传动机构,所述分配传动机构在从动侧一方面驱动枢转支承体、另一方面驱动阻转装置,并且枢转控制单元的设置在电路板上的控制电路设置在分配传动机构的驱动侧。
55.借此得到特别紧凑的解决方案。
56.尤其同样能以如下方式改进该解决方案,即通过降速传动机构来驱动分配传动机构,并且枢转控制单元的设置在电路板上的控制电路配属给降速传动机构。
57.降速传动机构提供的可能性是,将枢转控制单元尽可能近地设置在对于各个传感器合适的元件上,并且在此尤其规定,降速传动机构具有驱动侧的传动元件和从动侧的传动元件,并且枢转控制单元的设置在电路板上的控制电路设置在驱动侧的传动元件和从动侧的传动元件之间。
58.对此补充性地或者备选地同样可能的是,总壳体具有马达壳体部段,该马达壳体部段具有驱动马达,并且枢转控制单元的设置在电路板上的控制电路配属给马达壳体部段。
59.为了有利地接触,电路板同样设有插接接触元件。
60.当枢转控制单元的设置在电路板上的控制电路设置在马达壳体部段中时,解决方案是特别紧凑的。
61.在此,枢转控制单元同样能够部分地设置在枢转运行壳体部段中、部分地设置在马达壳体部段中。
62.另一有利的解决方案规定,枢转控制单元具有控制电路,控制电路借助于数据处理单元一方面与车辆侧的总线系统交流、另一方面根据预设的程序代码控制枢转单元。
63.在最简单的情形中,数据处理单元在此构造为实施各功能的处理器。
64.此外优选地规定,枢转控制单元具有控制电路,控制电路借助于数据处理单元和用于驱动马达的马达驱动电路控制驱动马达,以便使球颈在工作位置和静止位置之间枢转。
65.借助于马达驱动电路对驱动马达的这样的控制,优选地同样包括对用于驱动马达的马达电流的监测,从而例如在阻止球颈的枢转运动时能够通过用于驱动马达的增大的电流来凭借数据处理单元对其进行识别。
66.此外优选地规定,数据处理单元借助于枢转运动传感器探测球颈处于工作位置中还是处于静止位置中,这基于枢转运动传感器的绝对的测量性特征,在任何时间都是可能的,且还独立于此前的运行状态。
67.数据处理单元同样可对此补充性地额外构造,使得它借助于枢转运动传感器探测球颈在工作位置和静止位置之间的各居间位置,这基于枢转运动传感器的绝对的测量性特征,在任何时间都是可能的,且还独立于此前的运行状态。
68.在探测球颈的位置的所有情形中,优选地为数据处理单元预设枢转运动传感器的用于各个位置的参考值,并且随后由数据处理单元将这些参考值与被枢转运动传感器测量
到的值相比较。
69.另一有利的解决方案规定,数据处理单元借助于功能传感器探测阻转装置处于阻转位置中还是处于松开位置中。
70.这要么能直接通过配属给阻转装置的功能传感器进行,要么能间接通过与阻转装置共同作用的单元、例如通过保险装置进行。
71.为了能够在球颈枢转期间探测各个要由枢转单元执行的功能阶段,优选地规定,数据处理单元在驱动马达启动后,比较转速传感器的值和枢转运动传感器的值。
72.在这样的比较中存在如下可能性,即数据处理单元能够识别驱动马达需要多久来操控阻转装置,以及识别枢转支承体的枢转运动从什么时候起开始、尤其识别球颈的枢转运动从什么时候起开始。
73.另一有利的解决方案规定,数据处理单元基于启动信号而启动驱动马达,以便实施球颈的枢转运动,该启动信号是通过总线端子传送给该数据处理单元的。
74.此外已被证实为有利的是,仅仅在球颈处于静止位置或者处于工作位置中的时候,数据处理单元才基于启动信号而启动驱动马达。
75.这例如能由数据处理单元通过查询枢转运动传感器而得到探测。
76.而这同样可通过以下方式得到探测,即在球颈先前由工作位置到静止位置或者由静止位置到工作位置的运动中,探测并保存撞击终点位置时的驱动马达的电流的增长,从而借此能够识别的是,球颈的枢转运动中已经到达了终点位置中的一个终点位置。
77.此外通过功能传感器同样有以下可能,例如通过感测阻转装置来确认例如是否已到达工作位置。
78.另一有利的解决方案规定,数据处理单元在驱动马达运行时借助于枢转运动传感器监测球颈的枢转运动,即如同已经实施的那样,通过和保存在数据处理单元中的参考值的比较来实现。
79.在此尤其同样可能的是,数据处理单元借助于枢转运动传感器识别到达工作位置或者静止位置。
80.如已提到的那样,这可通过与已保存的参考值的比较来实现。
81.另一有利的解决方案规定,数据处理单元借助于马达驱动电路监测驱动马达的电流消耗,并且在预设的电流阈值被超过时使驱动马达停止。
82.例如,当球颈在工作位置和静止位置之间的运动中遇到障碍并在此于其继续运动上受阻时,所述超过预设的电流阈值的情形可能出现。
83.然而,如果球颈在到达工作位置或者静止位置时遇到止挡,那么所述超过电流阈值的情形同样出现。
84.为了能够安全可靠地区分这两种情境,优选地在这些情形中规定,数据处理单元额外地查询枢转运动传感器,并且将枢转运动传感器的值和参考值相比较,以便识别电流阈值是在工作位置与静止位置之间的运动的哪一阶段被超过的。
85.一种用于识别工作位置或者静止位置的有利的解决方案尤其规定,数据处理单元在其借助于枢转运动传感器探测到球颈的工作位置或者静止位置被达到时和/或在其借助于枢转运动传感器探测到驱动马达的电流消耗超过预设的电流阈值时生成“好”信号并在总线端子上发出该信号。
86.此外优选地规定,数据处理单元在驱动马达的电流消耗于球颈的工作位置或者静止位置之外超过预设的电流阈值时生成“坏”信号并在总线端子上发出该信号。
87.此外优选地规定,数据处理单元至少在一个对于松开保险装置而言必要的阶段期间内,比较转速传感器的值和枢转运动传感器的值,并随后在枢转运动传感器的值不在该时间上预设的阶段之后增长时在总线端子上发出“坏”信号。
88.另一有利的解决方案规定,数据处理单元借助功能传感器探测阻转装置的状态,并且在工作位置中当存在阻转位置时在总线端子上发出“好”信号,以及当在工作位置中不存在阻转位置时在总线端子上发出“坏”信号。
89.此外,由现有技术中已知,为了给拖挂在球颈上的拖挂车的照明单元通电、或者为了给车身中装配在球颈上的载体单元的照明单元通电,设置具有用于给插口的触点通电的插口控制单元。
90.在这一点上,当插口设置在拖挂连接装置的球颈上时,由另一供应商提供的插口控制单元和拖挂连接装置在机动车内的安装过程中的协调会出现问题。
91.根据本发明,在拖挂连接装置上,本任务按照权利要求1的前序部分或者根据前述实施方案之一通过以下方式解决,即拖挂连接装置在球颈上具有插口并且设有插口控制单元,插口控制单元具有用于给插口的触点通电的触点端子,并且插口控制单元为了供电而具有两个供电端子、为了控制而具有总线端子。
92.通过使拖挂连接装置设有插口控制单元,能够使该插口控制单元作为拖挂连接装置的部分来安装,并因此同样避免为插口通电过程中的错误源。
93.尤其合目的的是,插口控制单元具有插口控制电路,插口控制电路具有处理器和触点控制电路,通过该触点控制电路,处理器能控制用于插口触点的触点端子。
94.根据本发明的插口控制电路不仅涉及给触点端子通电的问题,还涉及保障与拖挂连接装置相连的单元的功能运行能力的问题,与拖挂连接装置相连的单元可以是拖挂车或者装载部。
95.所以规定,处理器连同触点控制电路尤其持续性地监测触点端子。
96.对触点端子的这样的监测能以非常多样的方式进行。
97.一种有利的解决方案规定,处理器在出现未通电情形时借助于触点控制电路监测触点端子对于接地的电阻,换而言之,处理器借助于触点控制电路检测触点端子和接地之间的电阻是否能够符合与接口触点相连的负荷,该负荷可以是照明单元或者另一用电器。
98.在此尤其构造插口控制电路,使得处理器在触点端子偏离预设的对于接地的电阻时,在总线端子上发出故障信号。
99.此外优选地规定,在通电时,处理器借助触点控制电路监测触点端子的流动电流,换而言之,处理器借助于触点控制电路持续性地检查通电时流动的电流是否符合规定的电流值。
100.此外,出于安全原因而合目的的是,当已通电的触点端子的预设的最大电流被超过时,处理器借助触点控制电路切断触点端子的通电,从而不仅能避免插口控制单元中的损坏,还能避免连接的用电器的损坏。
101.此外优选地规定,处理器在已通电的触点端子被切断时在总线端子上发出故障信号。
102.另一有利的解决方案规定,插口控制单元的处理器将到达该插口控制单元的、用于枢转控制单元的总线信号转发给设于插口控制单元上的、用于枢转控制单元的总线端子。
103.借此可能的是,插口控制单元直接连接在车辆总线上、例如直接连接在can总线上,还可能的是通过插口控制单元进行与枢转控制单元的交流,从而车辆的车辆can总线仅仅必须和插口控制单元交流。
104.在此优选地规定,用于枢转控制单元的总线端子是lin总线的端子,它允许插口控制单元和枢转控制单元之间的简化的交流。
105.另一有利的解决方案规定,插口控制单元的处理器将枢转控制单元的、到达该处理器的用于所述枢转控制单元的总线端子的总线信号转送给用于车辆总线系统的总线端子。
106.关于结合拖挂连接装置来布置插口控制单元,目前尚未作出进一步说明。
107.一种有利的解决方案规定,插口控制单元设置在枢转单元的总壳体中,换而言之,插口控制单元不仅是拖挂连接装置的部分,而且还集成在枢转单元的总壳体中。
108.在此,插口控制单元可以集成在不同的区域中。
109.一种有利的解决方案规定,插口控制单元设置在枢转运行壳体部段中。
110.另一有利的解决方案规定,插口控制单元设置在枢转单元的马达壳体部段中。
111.但同样可能的是,将插口控制单元的某些部分设置在枢转运行壳体部段中、而且将插口控制单元的某些部分设置在马达壳体部段中,以便达到理想的空间利用。
112.另一有利的解决方案规定,球颈具有容纳部,用于保持在球颈上的插口的插口控制单元设置在该容纳部中。
113.换而言之,在该解决方案中,插口控制单元的至少一部分或者整个插口控制单元保持在球颈上。
114.关于在球颈上用于插口控制单元的容纳部的构造,目前尚未作出进一步说明。
115.一种有利的解决方案规定,容纳部构造为球颈中的凹处。
116.在此例如构造该凹处,使得它设置在球颈的承载结构的上纵向撑杆和下纵向撑杆之间。
117.此外合目的地规定,凹处设置在紧固在车辆上的、可固定的第一末端和设置在球颈上的插口之间,从而插口控制单元能够借此以简单的方式置于插口附近。
118.原则上,插口可布置在球颈上。
119.而一种特别有益的解决方案规定,插口设置在由球颈的承载结构构造的插口容纳部中。
120.此外,为了保护插口控制电路,还可合目的地规定,插口控制电路由球颈的遮盖部覆盖。
121.对根据本发明的解决方案的前述说明因此尤其包括通过以下连续编号的实施方案定义的不同的特征组合:
122.1.一种拖挂连接装置,其包括能在工作位置(a)和静止位置(r)之间移动的球颈(10),所述球颈具有设置在第一末端(12)上的枢转支承体(14)和设置在第二末端(16)上的连接球部(18),所述拖挂连接装置还包括紧固在车辆上的枢转单元(s),所述枢转支承体
(14)借助该枢转单元能够枢转,以便围绕枢转轴线(22)在工作位置(a)和静止位置(r)之间实施枢转运动,其中,所述枢转单元(s)包括紧固在车辆上的枢转支承单元(20)和阻转装置(50),所述阻转装置用于至少在工作位置(a)中阻止枢转支承体(14)围绕所述枢转轴线(22)的枢转运动,其中,枢转控制单元(380)集成在所述枢转单元(s)中。
123.2.根据实施方案1所述的拖挂连接装置,其中,所述枢转单元(s)具有总壳体(400),所述枢转支承单元(20)、阻转装置(50)和驱动马达(180)设置在所述总壳体(400)中,并且其中,所述枢转控制单元(380)设置在所述总壳体(400)中。
124.3.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述枢转控制单元(380)借助于枢转运动传感器(372)探测所述球颈(10)围绕所述枢转轴线(22)的枢转运动。
125.4.根据实施方案3所述的拖挂连接装置,其中,所述枢转运动传感器(372)探测所述枢转支承体(14)围绕所述枢转轴线(22)的枢转运动。
126.5.根据实施方案4所述的拖挂连接装置,其中,所述枢转支承体(14)通过连接元件(100)与所述枢转运动传感器(372)共同作用。
127.6.根据实施方案3至5中任一项所述的拖挂连接装置,其中,所述枢转运动传感器(372)设置在传感器承载部(360)上。
128.7.根据前述实施方案中任一项所述的拖挂连接装置,其特征在于,所述枢转控制单元(380)借助于功能传感器(362)探测所述阻转装置(50)的功能。
129.8.根据实施方案7所述的拖挂连接装置,其中,所述枢转控制单元(380)借助于所述功能传感器(362)探测所述阻转装置(50)的至少一个位置。
130.9.根据实施方案8所述的拖挂连接装置,其中,所述枢转控制单元(380)通过感测所述阻转装置(50)的元件(52),来借助于所述功能传感器(362)探测所述阻转装置(50)的位置。
131.10.根据实施方案7至9中任一项所述的拖挂连接装置,其中,所述功能传感器(362)设置在传感器承载部(360)上。
132.11.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述枢转控制单元(380)借助于转速传感器(364)探测所述驱动马达(180)的转速。
133.12.根据实施方案11所述的拖挂连接装置,其中,所述转速传感器(364)配属给所述驱动马达(180)的从动轴(182)。
134.13.根据实施方案11或12所述的拖挂连接装置,其中,所述转速传感器(364)设置在传感器承载部(360)上。
135.14.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述枢转控制单元(380)借助于温度传感器(368)探测所述枢转单元(s)中的温度。
136.15.根据实施方案14所述的拖挂连接装置,其中,所述温度传感器(368)设置在传感器承载部(360)上。
137.16.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述传感器承载部(360)设有插接接触元件(396)。
138.17.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述总壳体(400)具有容纳所述枢转支承单元(20)、阻转单元(50)和至少一个传动单元(130、170)的枢转运行壳体部段(402),并且其中,所述传感器承载部(360)配属给所述枢转运行壳体部段(402)。
139.18.根据实施方案17所述的拖挂连接装置,其中,所述传感器承载部(360)设置在所述枢转运行壳体部段(402)中。
140.19.根据实施方案17或18所述的拖挂连接装置,其中,所述传动单元具有分配传动机构(130),所述分配传动机构在从动侧一方面驱动所述枢转支承体(14)、另一方面驱动所述阻转装置(50),并且其中,尤其所述传感器承载部(360)中的至少一个传感器承载部设置在所述分配传动机构(130)的驱动侧。
141.20.根据实施方案19所述的拖挂连接装置,其中,通过降速传动机构(170)来驱动所述分配传动机构(130),并且其中,所述传感器承载部(360)中的至少一个传感器承载部配属给所述降速传动机构(170)。
142.21.根据实施方案20所述的拖挂连接装置,其中,所述降速传动机构(170)具有驱动侧的传动元件(184)和从动侧的传动元件(172),并且其中,所述传感器承载部(360)中的至少一个传感器承载部设置在驱动侧的所述传动元件(184)和从动侧的所述传动元件(172)之间。
143.22.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述枢转运动传感器(372)、功能传感器(362)和转速传感器(364)设置在共同的传感器承载部(360)上。
144.23.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述总壳体(400)具有容纳所述枢转支承单元(20)和至少一个传动单元(130、170)的枢转运行壳体部段(402),并且其中,所述枢转控制单元(380)配属给所述枢转运行壳体部段(402)。
145.24.根据实施方案23所述的拖挂连接装置,其中,所述枢转控制单元(380)设置在所述枢转运行壳体部段(402)中。
146.25.根据实施方案23或24所述的拖挂连接装置,其中,所述传动单元具有分配传动机构(130),所述分配传动机构在从动侧一方面驱动所述枢转支承体(14)、另一方面驱动所述阻转装置(50),并且其中,所述枢转控制单元(380)设置在所述分配传动机构(130)的驱动侧。
147.26.根据实施方案25所述的拖挂连接装置,其中,通过降速传动机构(170)来驱动所述分配传动机构(130),并且其中,所述枢转控制单元(380)配属给所述降速传动机构(170)。
148.27.根据实施方案26所述的拖挂连接装置,其中,所述降速传动机构(170)具有驱动侧的传动元件(184)和从动侧的传动元件(172),并且其中,所述枢转控制单元(380)设置在驱动侧的所述传动元件(184)和从动侧的所述传动元件(172)之间。
149.28.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述总壳体(400)具有马达壳体部段(408),所述马达壳体部段具有所述驱动马达(180),并且其中,所述枢转控制单元(380)配属给所述马达壳体部段(408)。
150.29.根据实施方案28所述的拖挂连接装置,其中,所述枢转控制单元(380)设置在所述马达壳体部段(408)中。
151.30.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述枢转单元(s)具有总壳体(400),所述枢转支承单元(20)和驱动马达(180)设置在所述总壳体中,并且其中,所述枢转控制单元(380)的设置在电路板(382)上的控制电路(384)设置在所述总壳体(400)中。
152.31.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述总壳体(400)具有容纳所述枢转支承单元(20)和至少一个传动单元(130、170)的枢转运行壳体部段(402),并且其中,所述枢转控制单元(380)的设置在电路板(382)上的控制电路(384)配属给所述枢转运行壳体部段(402)。
153.32.根据实施方案31所述的拖挂连接装置,其中,所述枢转控制单元(380)的设置在电路板(382)上的所述控制电路(384)设置在所述枢转运行壳体部段(402)中。
154.33.根据实施方案30至32中任一项所述的拖挂连接装置,其中,所述传动单元具有分配传动机构(130),所述分配传动机构在从动侧一方面驱动所述枢转支承体(14)、另一方面驱动所述阻转装置(50),并且其中,所述枢转控制单元(380)的设置在电路板(382)上的所述控制电路(384)设置在所述分配传动机构(130)的驱动侧。
155.34.根据实施方案33所述的拖挂连接装置,其中,通过降速传动机构(170)来驱动所述分配传动机构(130),并且其中,所述枢转控制单元(380)的设置在电路板(382)上的所述控制电路(384)配属给所述降速传动机构(170)。
156.35.根据实施方案34所述的拖挂连接装置,其中,所述降速传动机构(170)具有驱动侧的传动元件(184)和从动侧的传动元件(172),并且其中,所述枢转控制单元(380)的设置在电路板(382)上的所述控制电路(384)设置在驱动侧的所述传动元件(184)和从动侧的所述传动元件(172)之间。
157.36.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述总壳体具有马达壳体部段(408),该马达壳体部段具有所述驱动马达(180),并且其中,所述枢转控制单元(380)的设置在电路板(382)上的所述控制电路(384)配属给所述马达壳体部段(408)。
158.37.根据实施方案36所述的拖挂连接装置,其中,所述枢转控制单元(380)的设置在电路板(382)上的所述控制电路(384)设置在所述马达壳体部段(408)中。
159.38.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述枢转控制单元(380)具有控制电路(384),所述控制电路借助于数据处理单元(386)一方面与车辆侧的总线系统交流、另一方面根据预设的程序代码控制所述枢转单元(s)。
160.39.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述枢转控制单元(380)具有控制电路(384),所述控制电路借助于数据处理单元(386)和用于所述驱动马达(180)的马达驱动电路(388)控制所述驱动马达(180),以便使所述球颈在所述工作位置(a)和静止位置(r)之间枢转。
161.40.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)借助于所述枢转运动传感器(372)探测所述球颈(10)处于所述工作位置(a)中还是处于所述静止位置(r)中。
162.41.根据实施方案40所述的拖挂连接装置,其中,所述数据处理单元(386)借助于所述枢转运动传感器(372)探测所述球颈(10)在所述工作位置(a)和静止位置(r)之间的各居间位置。
163.42.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)借助于所述功能传感器(362)探测所述阻转装置(50)处于阻转位置中还是处于松开位置中。
164.43.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元
(386)在所述驱动马达(180)启动后,比较所述转速传感器(364)的值和所述枢转运动传感器(372)的值。
165.44.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)基于启动信号而启动所述驱动马达(180),所述启动信号是通过总线端子(b)传送给该数据处理单元的。
166.45.根据实施方案44所述的拖挂连接装置,其中,仅仅在所述球颈(10)处于所述静止位置(r)或者处于所述工作位置(a)中的时候,所述数据处理单元(386)基于启动信号而启动所述驱动马达(180)。
167.46.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)在所述驱动马达(180)运行时借助于所述枢转运动传感器(372)监测所述球颈(10)的枢转运动。
168.47.根据实施方案46所述的拖挂连接装置,其中,所述数据处理单元(386)借助于所述枢转运动传感器(372)识别所述工作位置(a)或者静止位置(r)被到达。
169.48.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)借助于所述马达驱动电路(388)监测所述驱动马达(180)的电流消耗,并且在预设的电流阈值被超过时使所述驱动马达(180)停止。
170.49.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)在其借助于所述枢转运动传感器(372)探测到所述球颈(10)的工作位置(a)或者静止位置(r)被达到时和/或在其借助于所述枢转运动传感器(372)探测到所述驱动马达(180)的电流消耗超过预设的电流阈值时生成“好”信号并在所述总线端子(b)上发出该信号。
171.50.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)在所述驱动马达(180)的电流消耗于所述球颈的工作位置(a)或者静止位置(r)之外超过预设的电流阈值时生成“坏”信号并在所述总线端子(b)上发出该信号。
172.51.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)至少在一个对于松开保险装置而言必要的阶段期间内,比较所述转速传感器(364)的值和所述枢转运动传感器(372)的值,并随后在所述枢转运动传感器(372)的值不在该时间上预设的阶段之后增长时在所述总线端子(b)上发出“坏”信号。
173.52.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述数据处理单元(386)借助所述功能传感器(362)探测所述阻转装置(50)的状态,并且当在所述工作位置(a)中存在阻转位置时在所述总线端子(b)上发出“好”信号,以及在所述工作位置(a)中当不存在阻转位置时在所述总线端子(b)上发出“坏”信号。
174.53.根据实施方案1的前序部分或者根据前述实施方案中任一项所述的拖挂连接装置,其中,所述拖挂连接装置在所述球颈(10)上具有插口(34)并且设有插口控制单元(420),所述插口控制单元具有用于给所述插口(34)的触点(424、426)通电的触点端子(422),并且其中,所述插口控制单元(420)为了供电而具有两个供电端子( 、-)、为了控制而具有总线端子(b)。
175.54.根据实施方案53所述的拖挂连接装置,其中,所述插口控制单元(420)具有插口控制电路(432),所述插口控制电路具有处理器(436)和触点控制电路(438)。
176.55.根据实施方案54所述的拖挂连接装置,其中,所述处理器(436)连同所述触点
控制电路(438)监测所述触点端子(422)。
177.56.根据实施方案55所述的拖挂连接装置,其中,所述处理器(436)在未通电情形时借助于所述触点控制电路(438)监测所述触点端子(422)对于接地的电阻。
178.57.根据实施方案56所述的拖挂连接装置,其中,所述处理器(436)在所述触点端子(422)偏离预设的对于接地的电阻时在所述总线端子上发出故障信号。
179.58.根据实施方案54至57中任一项所述的拖挂连接装置,其中,在通电时,所述处理器(436)借助所述触点控制电路(438)监测所述触点端子(422)的流动的电流。
180.59.根据实施方案58所述的拖挂连接装置,其中,当已通电的所述触点端子(422)的预设的最大电流被超过时,所述处理器(436)借助所述触点控制电路(438)切断所述触点端子的通电。
181.60.根据实施方案59所述的拖挂连接装置,其中,所述处理器(436)在已通电的触点端子(422)被切断时在所述总线端子上发出故障信号。
182.61.根据前述实施方案中任一项所述的拖挂连接装置,其中,所述插口控制单元(420)的处理器(446)将到达该插口控制单元的、用于所述枢转控制单元(380)的总线信号转发给设于插口控制单元(420)上的、用于所述枢转控制单元(380)的总线端子(444)。
183.62.根据实施方案61所述的拖挂连接装置,其中,用于所述枢转控制单元(380)的总线端子是lin总线的端子。
184.63.根据实施方案61或62所述的拖挂连接装置,其中,所述插口控制单元(420)的处理器(446)将所述枢转控制单元(380)的、到达该处理器的总线端子(444)的总线信号转送给用于车辆总线系统的总线端子,所述总线端子(444)用于所述枢转控制单元(380)。
185.64.根据实施方案53至63中任一项所述的拖挂连接装置,其中,所述插口控制单元(420)设置在所述枢转单元(s)的总壳体(400)中。
186.65.根据实施方案64所述的拖挂连接装置,其中,所述插口控制单元(420)设置在所述枢转单元(s)的枢转运行壳体部段(402)中。
187.66.根据实施方案64或65所述的拖挂连接装置,其中,所述插口控制单元(420)设置在所述枢转单元(s)的马达壳体部段(408)中。
188.67.根据实施方案53至66中任一项所述的拖挂连接装置,其中,所述球颈(10)具有容纳部(452),用于保持在所述球颈(10)上的插口(34)的所述插口控制单元(420)设置在该容纳部中。
189.68.根据实施方案67所述的拖挂连接装置,其中,所述容纳部(452)构造为所述球颈(10)中的凹处。
190.69.根据实施方案68所述的拖挂连接装置,其中,所述凹处(452)设置在所述球颈(10)的承载结构(466)的上纵向撑杆(462)和下纵向撑杆(464)之间。
191.70.根据实施方案67至69中任一项所述的拖挂连接装置,其中,所述凹处(452)设置在紧固在车辆上的、可固定的第一末端(12)和设置在所述球颈(10)上的插口(34)之间。
192.71.根据实施方案53至70中任一项所述的拖挂连接装置,其中,所述插口(34)设置在由所述球颈(10)的承载结构(466)构造的插口容纳部(468)中。
193.72.根据实施方案53至71中任一项所述的拖挂连接装置,其中,所述插口控制电路(420)由所述球颈(10)的遮盖部(454)覆盖。
194.根据本发明的解决方案的其它特征和优点是后文中实施例的描述以及图示的对象。
附图说明
195.图中:
196.图1示出具有根据本发明的拖挂连接装置的机动车的后视图;
197.图2以大致在行驶方向上观察拖挂连接装置的视角,示出根据本发明的拖挂连接装置的第一实施例的立体图,并且示出了该拖挂连接装置是如何装配在车辆尾部上的,其中,所述拖挂连接装置处于其工作位置;
198.图3相反于行驶方向示出图2中的在工作位置中的拖挂连接装置的立体图;
199.图4示出处于静止位置的拖挂连接装置的根据图2的示图;
200.图5示出处于静止位置的拖挂连接装置的根据图3的示图;
201.图6示出图3的工作位置中的沿线6-6的截面的示图;
202.图7示出静止位置中类似于图6的截面的示图;
203.图8示出图7的工作位置中的沿线8-8的截面;
204.图9示出松开位置中具有被最大程度旋扭的操控体的类似于图8的截面的示图;
205.图10示出在枢转支承体从工作位置向外轻微枢转情形中的类似于图9的示图,其具有被最大程度旋扭的操控体;
206.图11示出内齿圈的和与其共同作用的驱动壳套的立体图;
207.图12以观察分配传动机构的视角,示出图6中沿线12-12的截面,所述分配传动机构包括内齿圈,而没有承载盘和保持环;
208.图13连同前置的降速传动机构示出分配传动机构的立体图;
209.图14示出分配传动机构和降速传动机构的立体爆炸图;
210.图15示出具有遮盖部的枢转支承体的立体爆炸图;
211.图16示出工作位置中根据图6的放大截面;
212.图17示出静止位置中类似于图6的放大截面;
213.图18示出起始位置中;
214.图18a示出驱动壳套侧的分配传动机构的内齿圈的俯视图;
215.图18b示出处于根据图18a的位置中的内齿圈和去激活单元、阻转装置共同作用的立体图,去激活单元用于静止位置锁止装置;
216.图18c示出根据图18a的位置中的内齿圈和保险装置、阻转装置共同作用的立体图;
217.图19示出内齿圈的相对起始位置的已转过的第一位置,其用于松开保险装置,而对阻转装置没有影响;
218.图19a示出驱动壳套侧的分配传动机构的内齿圈的俯视图;
219.图19b示出处于根据图19a的位置中的内齿圈和去激活单元、阻转装置共同作用的立体图,去激活单元用于静止位置锁止装置;
220.图19c示出根据图19a的位置中的内齿圈和保险装置、阻转装置共同作用的立体图;
221.图20示出内齿圈的相对起始位置的已最大程度转过的位置,其对阻转装置没有影响;
222.图20a示出驱动壳套侧的分配传动机构的内齿圈的俯视图;
223.图20b示出处于根据图20a的位置中的内齿圈和去激活单元、阻转装置共同作用的立体图,去激活单元用于静止位置锁止装置;
224.图20c示出根据图20a的位置中的内齿圈和保险装置、阻转装置共同作用的立体图;
225.图21示出阻转装置到达松开位置时内齿圈的相对起始位置的已转过的位置;
226.图21a示出驱动壳套侧的分配传动机构的内齿圈的俯视图;
227.图21b示出处于根据图21a的位置中的内齿圈和去激活单元、阻转装置共同作用的立体图,去激活单元用于静止位置锁止装置;
228.图21c示出根据图21a的位置中的内齿圈和保险装置、阻转装置共同作用的立体图;
229.图22示出枢转支承体到达静止位置时内齿圈的相对起始位置的已转过的位置;
230.图22a示出驱动壳套侧的分配传动机构的内齿圈的俯视图;
231.图22b示出处于根据图22a的位置中的内齿圈和去激活单元、阻转装置共同作用的立体图,去激活单元用于静止位置锁止装置;
232.图22c示出根据图22a的位置中的内齿圈和保险装置、阻转装置共同作用的立体图;
233.图23示出内齿圈的相对起始位置的已转过的位置以及对静止位置锁止装置的去激活的操作;
234.图23a示出驱动壳套侧的分配传动机构的内齿圈的俯视图;
235.图23b示出处于根据图23a的位置中的内齿圈和去激活单元、阻转装置共同作用的立体图,去激活单元用于静止位置锁止装置;
236.图23c示出根据图23a的位置中的内齿圈和保险装置、阻转装置共同作用的立体图;
237.图24示出阻转装置过渡到阻转位置过程中内齿圈的相对根据图18的起始位置的已转过的位置;
238.图24a示出驱动壳套侧的分配传动机构的内齿圈的俯视图;
239.图24b示出处于根据图24a的位置中的内齿圈和去激活单元、阻转装置共同作用的立体图,去激活单元用于静止位置锁止装置,以及
240.图24c示出根据图24a的位置中的内齿圈和保险装置、阻转装置共同作用的立体图;
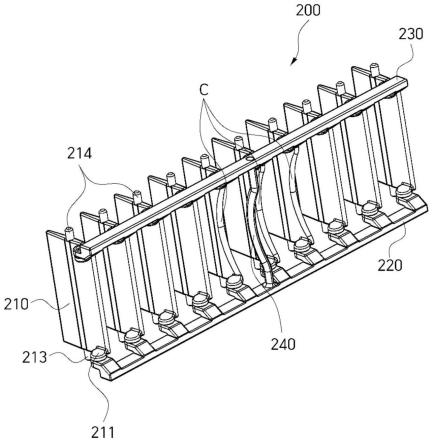
241.图25示出降速传动机构的驱动侧部分的立体图,其具有承载各传感器的传感器承载部;
242.图26示出传感器承载部的部分截面的立体图,其具有传感器和操控部;
243.图27示出承载体的立体图和由该承载体保持的马达壳体部段的立体图;
244.图28示出取下马达壳体部段情形下承载体的另一立体图;
245.图29示出传感器承载部的立体图,其具有同样设置在该传感器承载部上的控制电
路;
246.图30示出控制电路的功能的示意图;
247.图31示出第二实施例的类似于图25的立体图;
248.图32示出第三实施例的类似于图25的立体图;
249.图33示出插口控制单元的第一实施方案的示意图;
250.图34示出根据本发明的插口控制单元的第二实施方案的示图,以及
251.图35示出球颈的示图,其包含设置在该球颈上的根据本发明的插口控制单元的第二实施方案。
具体实施方式
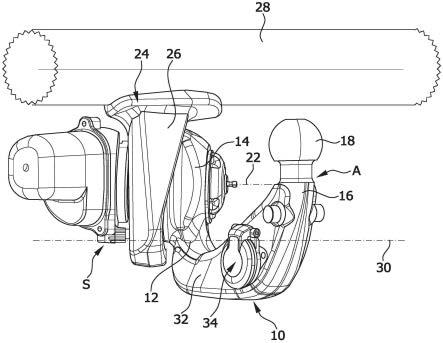
252.根据本发明的用于机动车k的拖挂连接装置ak的实施例,在图1至图3中示出处于工作位置a、在图4、图5中示出处于静止位置r,该拖挂连接装置包括整体以10标记的球颈,该球颈借助第一末端12保持在枢转支承体14上、并且在第二末端16上承载以18标记的连接球部,在该连接球部上可固定有拖挂车的连接球部容纳部或者装载部的连接球部容纳部。
253.通过整体以s标记的枢转单元,所述枢转支承体14围绕枢转轴线22相对于紧固在车辆上设置的承载器24可枢转地支承,其中,所述承载器24例如具有保持所述枢转单元s的承载盘26,该承载盘优选地在横向于所述枢转轴线22延伸的平面中延伸、并且保持于紧固在车辆上的横向载体28上,该横向载体能够以已知的方式固定在机动车k的车身f的尾部区域h中,而且所述枢转单元s和承载器24位于保险杠单元的下棱边30的背离车道表面fo的一侧上、并且在所述机动车k的行驶方向上看去从后由所述保险杠单元36遮盖,从而在工作位置中仅仅可见具有所述第二末端16和连接球部18的所述球颈10,而整个承载器24、尤其所述横向载体28被所述保险杠单元36遮住。
254.在图1至图3示出的工作位置a中,所述球颈10借助连在所述第一末端12上的部段32从下方接在所述保险杠单元36的下棱边30上,从而在所述工作位置中,处于后保险杠单元36的背对车身f一侧上的所述第二末端16和连接球部18连同插口34都是可及的。
255.如果与之相反如图4和图5所示的那样,所述球颈10枢转到所述静止位置r中,那么在所述车道表面fo上方的所述球颈10的连接到所述第一末端12上的部段32会高于所述连接球部18,并且从后看去,整个球颈10因此通过所述保险杠单元36在所述保险杠单元36和所述车身f的尾部区域h之间被遮住。
256.此外,在行驶方向上从后观察所述机动车k时,整个枢转单元s不仅在工作位置a时、还有在静止位置r时,都始终在保险杠单元和所述车身f的尾部区域h之间通过后保险杠单元36遮住。
257.如图6和图7所示,所述枢转单元s包括具有引导体40的枢转支承单元20,所述引导体借助法兰42与所述承载盘26固定相连,所述枢转单元还包括由所述法兰42出发、远离所述承载盘26延伸的引导壳套44,所述球颈10的枢转支承体14围绕所述枢转轴线22可转动地支承在该引导壳套上。
258.对此,例如所述引导壳套44包括圆柱形的外表面46,所述枢转支承体14以圆柱形的内表面48贴靠在该外表面上、并借此围绕所述枢转轴线22得以被转动引导,从而所述枢转支承体14相对于所述引导体40可转动地支承,以便使所述球颈10由所述工作位置a枢转
到静止位置r、以及由所述静止位置r枢转到工作位置a。
259.所述引导体40此外包括通过破口27在所述承载盘26中延伸的延伸部41,该延伸部延伸至所述破口27的对置于所述法兰42的一侧,并且承载保持环43,所述保持环贴靠在所述承载盘26的对置于所述法兰42的一侧上,从而所述承载盘26整体在所述法兰42和保持环43之间夹紧,并且所述引导体40因此与所述承载器24的承载盘26固定相连,并且因此构成用于所述枢转支承体14的紧固在车辆上的转动支承。
260.除了所述枢转支承单元20,所述枢转单元s额外包括整体以50标记的阻转装置,该阻转装置例如集成在所述枢转支承单元20中,但同样可独立于所述枢转支承单元20设置,并且如图8至图10所示,所述阻转装置除了所述操控体52还具有多个通过该操控体52加载的阻转体54,在所述引导壳套44的引导容纳部56中可移动地在相对所述枢转轴线22基本径向延伸的引导方向58上引导每个阻转体。
261.例如,至少所述阻转体54和引导容纳部56相对于垂直于所述枢转轴线22延伸的、与所述阻转体54相交的几何平面对称地设置,该平面在图8至图10中相当于制图面。
262.此外,所述阻转装置50包括由所述枢转支承体14的内表面48出发的、尤其在相对于所述枢转轴线22的径向方向上延伸进入该枢转支承体的容纳部60,所述阻转体54在所述工作位置a中可与这些容纳部嵌接,其中,所述容纳部60在相对于所述枢转轴线22的径向方向上越来越多地具有壁面,所述壁面彼此间具有较小的距离。
263.如果如第一实施例中结合图8至图10所示,所述阻转装置50例如包括由三个阻转体54a、54b、54c组成的一组阻转体,那么所述引导壳套44具有相应的由三个引导容纳部56a、56b、56c组成的一组引导容纳部,在这些引导容纳部中,在相对所述枢转轴线22基本径向延伸的引导方向58上可移动地引导所述阻转体54a、54b、54c,并且所述枢转支承体14设有一组容纳部60a、60b、60c,所述阻转体54a、54b、54c在所述工作位置a中可与这些容纳部嵌接。
264.为了实现所述阻转体54在引导方向58上的合适的移动与定位,所述操控体52设有例如由三个回退容纳部62a、62b、62c与三个在环绕方向64上接在所述回退容纳部62a、62b、62c上的压面66a、66b、66c构成的组,该组与所述阻转体54的数量对应,并且所述压面构造为相对所述枢转轴线22径向作用的楔面,其中,所述阻转体54在其松开位置中能够深入所述回退容纳部62a、62b、62c中(图9),从而它们不再凸出超过所述引导壳套44的外表面46,并且其中,所述压面66a、66b、66c分别从直接连接到各个回退容纳部62上的、径向内置的开始区域68a、68b、68c出发、借助在所述环绕方向64上的不断延伸,持续地相对于所述枢转轴线22径向地向外延伸,且一直延伸到各径向地外置的结束区域70a、70b、70c,并且因此在所述操控体52转动运动时,所述压面作为楔面作用在所述阻转体54上,以便使它们移动到其阻转位置中。
265.在此,所述压面66优选地作为螺旋节段或者渐开节段相对于所述枢转轴线22延伸。
266.要么为了使所述阻转体54通过借助开始区域68和结束区域70之间的压面66对其加载而保持在其阻转位置中,要么为了使所述阻转体在松开位置中能够深入所述回退容纳部62,所述操控体52同样可围绕所述枢转轴线22、尤其相对于所述枢转轴线共轴地转动,而且所述回退容纳部62a、62b、62c构成的组面向所述阻转体54,并且如图9所示使这些阻转体
在其未激活的位置或者松开位置中能够在过渡到松开位置时在相对所述枢转轴线22的径向方向上深入所述回退容纳部62,以便使各个阻转体54能够离开所述容纳部60、并且能连同所述枢转支承体14关于围绕所述枢转轴线22的转动来相对于所述引导体40空出该容纳部60,从而所述枢转支承体14和球颈10能够如图9所示相对于所述引导壳套44不受妨碍地、自由地转动,其中,在该情形中,所述阻转体54不通过所述引导壳套44的外表面46向外延伸。
267.当阻转体54处于回退容纳部62中的时候,所述操控体52在相反于所述环绕方向64的转动方向72上的转动使所述阻转体54从所述回退容纳部62移出,并且首先在操控体52的激活的位置或者操控体52的阻转位置位于所述压面66的开始区域68上,而在此例如深入所述容纳部60中并且借此在其阻转位置避免所述枢转支承体14相对于所述引导体40的自由的可转动性。
268.如果所述操控体52在相反于所述环绕方向64的转动方向72上继续转动,那么所述压面66的径向地相对所述枢转轴线22位于外部的区域继续作用于所述阻转体54,并因此在球颈10的工作位置a中持续将所述阻转体54压进所述容纳部60a、60b、60c(图8),以便因此实现对所述枢转支承体14相对于所述引导体40、在本情形中相对于所述引导壳套44的基本上无间隙的固定。
269.在所述阻转体54的阻转位置,所述操控体52处于其激活的位置,使得所述阻转体54如图8所示大致位于所述压面66的中央区域76上,并且由所述压面加载,所述中央区域在所述开始区域68和结束区域70之间。
270.为了使所述操控体52能优化地分别对三个阻转体54中的每个阻转体加载,规定在激活的位置中,对所述操控体52进行与所述阻转体54的位置相对应的置中。所述操控体52尤其支承在所述引导壳套44中,使得所述操控体52由于径向间隙而能够自行对对己地进行与所述引导体40内的阻转体54的位置相对应的置中,所述阻转体54的位置通过制造公差决定,其中,所述操控体52的自行的对己置中可轻微地偏离对于几何的枢转轴线22的共轴布置。
271.由于该自行的对己置中,所述阻转体54a、54b、54c在各自的引导方向58a、58b、58c上以大小大致相同的力作用在所述容纳部60a、60b、60c上,从而作用在所述操控体52上的反作用力的大小同样大致相同。
272.所述阻转体54优选地构造成球部或者滚轮,它们因此一方面贴靠在所述操控体52上、另一方面同样贴靠在所述容纳部60上。
273.因此仅实现所述操控体52相对于所述枢转轴线22的有间隙的可转动的支承,这首要在所述操控体52将所述阻转体54保持在松开位置中时是重要的,所述阻转体54在松开位置中深入所述操控体52的回退容纳部62。
274.为了离开所述操控体52、且在无外部影响下始终在所述转动方向72上移动、其中所述阻转体54朝向所述阻转位置的方向移动,以扭力弹簧114对所述操控体52加载(图6、图7),该扭力弹簧一方面作用于所述操控体52,另一方面在径向上外置地支撑在所述引导体40上。
275.所述扭力弹簧114同样使所述操控体52以加载力的方式将所述阻转体54压进所述容纳部60中,所述枢转支承体14因此无间隙地得以固定,其中,这里的无间隙性同样在所述
容纳部60的几何形状由于运行中的负载而变化的情形下,通过所述操控体52在所述转动方向72上的继续转动而得以维持。
276.可构造所述阻转装置50,使得所述球颈10如ep2261066a描述的那样在工作位置a和静止位置r中进行抗扭的固定,或者使得所述球颈10如ep3141405a或ep3815936a描述的那样仅仅在工作位置a中进行抗扭的固定。
277.所述引导壳套44优选地和构造了用于所述操控体52的容纳部102的部段一起,在所述法兰42和法兰104之间延伸,所述法兰104封闭所述引导壳套44且在相对所述枢转轴线22径向延伸,而且优选一体式地在所述引导壳套44上成形,另外还限定用于所述操控体52的容纳部102,从而所述操控体52被所述引导壳套44的容纳部102相对所述枢转轴线22径向地引导,并且被所述法兰104的内侧108上的贴靠部在所述枢转轴线22的方向上轴向地引导。
278.所述法兰104此外还具有相对所述枢转轴线22共轴的容纳部106,枢转驱动轴100穿过的加入部110装入、尤其旋拧进所述容纳部106中,该加入部位于所述容纳部106中。
279.用于所述操控体52的容纳部102的与所述法兰104对置的一侧上,所述引导壳套44例如借助一个部段来构造扭力弹簧容纳部112,所述部段穿过所述法兰42,所述扭力弹簧114直接在所述操控体52之后设置于扭力弹簧容纳部中,并且一方面以外部的末端固定在所述扭力弹簧容纳部112中、另一方面以内部的末端与驱动壳套122相连,该驱动壳套和所述操控体52抗扭地连接。
280.如图7、图8、图11所示,所述驱动壳套122对此例如设有突出部124,这些突出部嵌入所述操控体52,以便形成进入相应的凹部126的形锁合连接。
281.所述扭力弹簧114作用在抗扭地与所述操控体52连接的所述驱动壳套122上,以此通过所述扭力弹簧114对驱动壳套122的影响来在转动方向72上驱动所述操控体52,从而当所述扭力弹簧114不受妨碍地影响所述驱动壳套122时,所述操控体52始终在所述转动方向72上对所述操控体52加载,进而具有趋势,以加载力的方式在所述引导方向58上径向地远离所述枢转轴线22向外移动所述阻转体54,其中,如de102020111469a描述的那样,所述移动例如能通过阻止面90在其构造合适的情形下,在所述枢转支承体14的除工作位置a以外的所有的规定的枢转位置受到阻碍,并且所述阻转体54因此仅仅在工作位置a中被压进所述容纳部60,并且所述枢转支承体14因此相对于所述引导壳套44被抗扭地、尤其无间隙地固定。
282.为了能够将所述阻转体54移入松开位置,相反于所述转动方向72对所述操控体52施加作用是必需的,并且因此相抗于所述扭力弹簧114的作用来对所述操控体52施加作用同样是必需的。
283.对此可借助于整体以130标记的分配传动机构、尤其借助于分配传动机构或者行星齿轮传动机构来驱动所述驱动壳套122(图6、图7),所述传动机构设置在所述引导壳套44的传动机构容纳部132中并且尤其相对所述枢转轴线22共轴地设置,所述传动机构另外例如部分地设置在所述承载盘26的破口27内部,并且优选地在和所述法兰42对置的一侧上远离所述承载盘26的破口27延伸。
284.所述分配传动机构130(图12)本身包括内齿圈142,该内齿圈在所述传动机构容纳部132中引导,并且设有内啮合齿部144,行星齿轮146借助其外啮合齿部148与所述内啮合
齿部144啮合。
285.在此,所述行星齿轮146可转动地保持在行星齿轮承载部152上,所述行星齿轮承载部本身与所述枢转驱动轴100抗扭地相连,从而所述行星齿轮承载部152构造用于实施球颈10的枢转的所述分配传动机构130的从动部。
286.如图11所示,所述内齿圈142此外包括位于所述行星齿轮承载部152和所述扭力弹簧114之间的法兰体154,该法兰体同样在所述枢转驱动轴100的方向上延伸、包围所述枢转驱动轴,但可相对于所述枢转驱动轴转动,并且所述法兰体是所述分配传动机构130的从动部,以便操控所述阻转装置50。
287.如图11所示,所述法兰体154具有围绕所述枢转轴线22环绕地设置的圆弧形的驱动部缝隙156a、156b,所述驱动部缝隙和所述驱动壳套122的嵌入驱动部缝隙中的驱动部指销158a、158b共同作用,而驱动部缝隙构造成,使得通过围绕枢转轴线22的、各驱动部缝隙156包括的角区域和围绕枢转轴线22的、各驱动部指销158包括的角区域之间的差,可实现所述驱动壳套122相对于所述内齿圈142的自由通行,这在后文还会详细阐述。
288.所述行星齿轮146此外借助其外啮合齿部148,处于与所述分配传动机构130的太阳轮162的外啮合齿部164啮合的状态,所述分配传动机构支承在所述枢转驱动轴100的轴端166上,并且相对于所述枢转驱动轴100可自由转动地、却又相对所述枢转驱动轴共轴地支承。
289.如图13和图14所示,通过降速传动机构170驱动所述太阳轮162,所述降速传动机构本身在从动侧具有和所述太阳轮162抗扭地连接的内齿圈172,该内齿圈设有内啮合齿部,相对所述枢转轴线22偏心设置的小齿轮176嵌入所述内啮合齿部中,所述小齿轮本身又与蜗轮178抗扭地相连,而所述蜗轮通过设置在驱动马达180的从动轴182上的驱动蜗杆184受到驱动,其中,所述驱动蜗杆184是所述降速传动机构170的驱动侧的传动元件。
290.因此,通过所述分配传动机构130、降速传动机构170和驱动马达180可实现用于所述阻转装置50的操控,以及可实现所述球颈10的借助于所述驱动马达180的枢转。
291.如前所述,所述行星齿轮承载部152抗扭地连接的所述枢转驱动轴100穿过所述引导体40的法兰104,并且所述枢转驱动轴在相对所述加入部110凸出的末端192上和驱动体194抗扭地连接(图15、图16),所述驱动体具有两个驱动臂196a、196b,所述驱动臂朝向所述枢转支承体14的末端法兰198的方向延伸,而所述末端法兰从上方接在所述引导体14的法兰104的外置区域200上,并且在此形锁合地嵌入其凹部中,以便在所述驱动体194和所述枢转支承体14之间形成抗扭的连接。
292.在外置的所述区域200中,所述末端法兰198在此从上方接在所述引导体40的法兰104上,并且延伸直到所述法兰104的引导凸出部202,其中,所述末端法兰198例如借助径向地内置的圆柱面204包围所述引导凸出部202的外置的圆柱面206,并且例如贴靠在所述外置的圆柱面206上,并且借此同样还额外地在所述引导凸出部202上相对所述枢转轴线22共轴地引导。
293.此外,螺纹212在所述引导凸出部202的容纳部106中延伸,所述加入部110固定在该螺纹中、尤其旋拧在该螺纹中,所述加入部借助外法兰214,部分的在径向地内置的区域中从上方接在所述末端法兰198上,从而所述枢转支承体14的末端法兰198在所述法兰104和所述加入部110的外法兰214之间不可轴向移动地引导,并因此相对于所述引导体40不可
轴向移动地引导。
294.此外,遮盖部222抗扭地装配在所述末端法兰198上,该遮盖部从上方接在具有驱动臂196的驱动体194上,并且构成用于引导轴100的末端192的轴承容纳部224,从而所述遮盖部222与所述枢转支承体14构成一个单元,其能够围绕所述枢转轴线22转动(图17)。
295.在此,所述遮盖部222位于所述末端法兰198上并且抗扭地固定在该末端法兰上。
296.在前文已描述的解决方案中,仅设有一组用于使枢转支承体14抗扭地固定在工作位置a的容纳部60,而未规定通过所述阻转装置50将所述枢转支承体14固定在静止位置r中。
297.更确切地说,如图16、图17所示,为了将所述枢转支承体14固定在静止位置中,设有静止位置锁止装置270,其具有设于末端法兰198中的孔272内的锁止体274,通过例如设置在所述孔272中的弹簧单元276,在平行于所述孔272的锁止方向上以及朝向所述法兰104的方向上,对该锁止体274加载力,其中,所述锁止体274在所述枢转支承体214的除了静止位置r的所有转动位置中,都贴靠在所述法兰104的外置的区域200上,该法兰将所述锁止体274保持在其未激活的位置,并且其中,仅当所述枢转支承体14处于静止位置时(图17),所述锁止体274嵌入所述法兰104中的构造成锁止孔的锁止容纳部282。
298.对此,所述弹簧元件276持续朝向所述法兰104的面向所述末端法兰198的法兰侧的方向对所述锁止体274加载,并因此将所述锁止体持续保持在锁止就绪位置,其中,仅在所述枢转支承体14相对所述枢转支承单元20的引导体40到达了和静止位置r对应的转动位置时,所述锁止体274嵌入所述锁止容纳部282、并且因此由未激活的位置到激活的锁止位置的过渡是可能的。
299.为了对所述静止位置锁止装置270去激活、即为了撤销所述锁止体274的锁止位置,在所述引导壳套44中的锁止容纳部282的延续部中设置操控销284,该操控销借助触头286感测设置在所述内齿圈142上的滑槽轨道288,所述滑槽轨道设置在径向地外置于所述内啮合齿部144的、在所述内齿圈142上环绕的滑槽法兰290上,并且因此构造用于所述静止位置锁止装置270的去激活单元280。
300.如后文中详细所述,图18至图24示出所述内齿圈142的转动运动与所述驱动壳套122、嵌入这些驱动部缝隙156a、156b的驱动部指销158a、158b、所述操控销284的触头286以及与保险销294的共同作用,发生转动方向292的转动时,内齿圈的所述转动运动始于工作位置中的静止位置,所述驱动壳套用于借助于设置在内齿圈142的法兰体154中的所述驱动部缝隙156a、156b来驱动所述操控体52,所述保险销和同样由所述滑槽法兰290构造的滑槽轨道298共同作用,并且该滑槽轨道298借助于感测面296进行感测(图17)。
301.在图18示出的起始位置中,所述触头286位于所述滑槽轨道的轨道部段302上,借此,所述操控销284如图16所示的那样处在其可能引起所述静止位置锁止装置270的锁止体274松开的位置,如果所述枢转支承体14位于静止位置。然而,因为根据图18的所述枢转支承体14位于工作位置,所以所述操控销284没有作用。
302.如果借助于所述分配传动机构130进行所述内齿圈142的驱动,那么所述内齿圈142在所述转动方向292上转动,并且所述触头286在所述滑槽轨道288的区域304上移动,该区域在平行于所述枢转轴线的方向上相对所述区域302偏后,从而只要该区域304被所述锁止体274加载,就允许所述操控销284的移动,其中,如果没发生该情形,那么所述操控销284
同样能够停留在通过所述滑槽轨道288的区域302预设的位置中(图19)。
303.此外如图19a所示,首先发生具有所述滑槽法兰290的内齿圈142的转动、但不伴随对所述驱动壳套122的驱动,因为所述驱动部缝隙156a、156b允许所述内齿圈相对于所述驱动部指销158a、158b的这样的相对转动、且不使它们随同转动。
304.所述内齿圈142在此还能够继续转动,直至所述驱动部缝隙156a、156b在所述转动方向292上贴靠在所述驱动部指销158a、158b上(图20),其中,所述操控销284的触头286继续相对于所述滑槽轨道288在该滑槽轨道的区域304上移动,并且所述区域304持续相对于所述区域302后移地延伸。通过所述驱动部指销158a、158b围绕所述枢转轴线的随同转动而实现的所述驱动壳套122的同步此时引起的是,首先同样还是发生所述操控体52的转动,而且如图20所示,所述操控体52转动,直至所述阻转体54能够深入配属给所述阻转体的回退容纳部62中且因此到达所述松开位置(图21),在所述松开位置中,所述阻转体位于所述回退容纳部62中,从而所述阻转装置50从现在起处于其松开位置中并且开放所述枢转支承体14的转动运动,从而所述枢转支承体可从工作位置枢转出来。
305.在到达松开位置时,所述内齿圈142在该方向上的进一步的转动运动被前来贴靠在所述保险销294上的止挡295阻碍,并且通过开放所述枢转支承体14的枢转运动而发生所述枢转支承体的枢转。
306.如前文所述,通过离开所述工作位置a,由至少一个贴靠在所述阻止面90上的阻转体54使松开位置中的所述操控体52受阻,并且此外,所述驱动壳套122的转动位置及其驱动部指销158a、158b被固定在与所述操控体52的松开位置相对应的转动位置中,根据图21,该转动位置同样和所述内齿圈142的转动位置相对应。
307.当所述分配传动机构130的驱动部为了使所述枢转支承体14由工作位置a枢转到静止位置r中而继续运行时,所述操控体52通过所述内齿圈142已如下方式被最大程度地旋扭到松开位置中,即所述阻转体54能以最深的程度进入所述回退容纳部62中,从而如图9所示,所述阻转体54有间隙地位于所述回退容纳部和所述阻止面90之间。
308.视乎在所述枢转支承体14枢转时出现的相对于所述扭力弹簧114的扭矩的反扭矩,所述阻转体52在所述枢转支承体14随所述球颈10由工作位置a枢转到静止位置r时留在最大程度旋扭的松开位置中,或者通过所述扭力弹簧114的扭矩引起所述操控体52在转动方向72上的旋扭,从而所述回退容纳部62借助拱形的、斜向于相应的引导方向58延伸的基面对所述阻转体54施加影响,并且使所述阻转体54中的至少一个阻转体贴靠在所述阻止面90的一个阻止面上,直至所述静止位置r被达到。
309.任何情况下,在所述静止位置r被达到时都不再有对所述内齿圈142的影响,从而所述扭力弹簧114最迟随后使所述操控体52在转动方向72上旋扭,使得所述回退容纳部62对所述阻转体54施加影响,并且位于所述阻止面90的一个阻止面之前的阻转体54贴靠在阻止面90上。
310.在所述内齿圈142的这一转动位置中,所述操控销284能够移动,使得所述静止位置锁止装置270的锁止体274深入所述锁止容纳部282、并且能够将所述枢转支承体14固定在静止位置中。然而这在所述枢转支承体214到达所述静止位置r之后才会发生。
311.这一位置在图22中示出,并且通过所述内齿圈142由根据图21的位置出发、在转动方向292上的继续转动,这一位置被达到。
312.在该位置中,通过所述锁止体274对所述操控销284加载,从而所述触头286被移动,直至其贴靠在所述滑槽轨道288的区域306上,其中,所述操控销284借此允许所述锁止体274嵌入所述锁止容纳部282。
313.在所述枢转支承体14的静止位置被达到后,同样关掉用于所述分配传动机构130的驱动马达180,从而所述内齿圈142留在图22示出的位置中,并且所述操控销284因此同样通过所述触头286被置于所述滑槽轨道288的区域306上来维持所述枢转支承体214的静止位置,其实现方式是,所述锁止体274通过所述弹簧元件276的影响而留在锁止容纳部,而所述操控销284不会起反作用。
314.如果现在所述枢转支承体214又要由静止位置过渡到工作位置,那么再次驱动所述分配传动机构130,然而从现在开始是在相反的方向上进行的,从而所述内齿圈142同样在相反的转动方向上转动、本情形中在转动方向312上转动(图23)。
315.借此,所述滑槽轨道288相对于所述操控销284的触头286移动,并且所述触头286沿着所述滑槽轨道288进入所述区域302,这使所述操控销284朝向所述末端法兰198的方向通过由所述区域306出发向上升高地的区域304移动、并且所述锁止体274因此从所述锁止容纳部282移出,从而所述静止位置锁止装置270借此转入其已松开的位置,并且不再存在所述枢转支承体214在静止位置中的锁止。
316.在此,所述阻转装置50的操控体52却仍然固定在其松开位置中,其中,如前所述,在松开位置中对所述阻转体52的阻止的解除,取决于工作位置a中所述枢转支承体14的转动位置。
317.在撤销阻止工作位置中的所述操控体52之后,所述操控体52通过所述扭力弹簧114的影响进行转动运动,从而所述操控体52同样与所述驱动壳套122在转动方向312上开始转动,并且如图23所示,基于所述驱动部指销158相对于驱动部缝隙156的可移动性而相对于所述内齿圈142转动,从而所述驱动部指销158a、158b相对于驱动部缝隙156a、156b在转动方向312上开始移动,以便随后再次在工作位置中到达图18所示的转动位置。
318.此外如图18至图24所示,所述内齿圈142的滑槽法兰290不仅承载所述滑槽轨道288以操控所述操控销284,此外还承载所述保险滑槽轨道298以操控所述保险销294,这在图16、17以及图18至图24中示出。
319.在此,所述保险销294具有保险体322,其嵌入保险凹部324,以便保障所述操控体52的转动位置在阻转位置中,所述保险凹部构造成,使得所述操控体52无法离开阻转位置,并因此无法离开工作位置中的阻转位置,换而言之,所述枢转支承体214在工作位置中的定位因此同样得到保障。
320.可通过所述保险滑槽轨道298移动的所述保险销294与所述保险体322、保险凹部324一起构造保险装置330。
321.所述保险滑槽轨道298优选地相对于所述滑槽轨道288对置地设置在所述滑槽法兰290上,并且成形,从而该保险滑槽轨道298使所述保险销294由其保险位置出发(图18)、并且在所述内齿圈142由起始位置在转动方向292上的初始的转动后移动,从而所述保险体322从所述操控体52的保险凹部324出来(图19c),以便开放所述操控体52的后续转动运动,所述保险体322在保险位置中嵌入所述保险凹部324(图18c)。
322.对此,所述保险滑槽轨道298设有区域332和区域334,所述区域332起保障作用并
且允许保障所述操控体52的阻转位置,所述区域334起取消保障作用并且取消保障所述阻转体52的移动,这两个区域通过过渡区域336彼此相连。
323.此外,所述保险销294还设有延伸部342,该延伸部342视乎所述保险销294的位置来操控或者不操控触键344,其中,例如设置所述触键344,使得它在所述保险销294的取消保障位置受到操控(图7)并且在所述保险销294的保障位置不受操控(图6),其中,同样能以相反的方式进行所述触键344的操控。
324.根据本发明的拖挂连接装置运行如下。
325.如图1、图2、图3和图6所示,由所述工作位置a出发开启所述驱动马达180,使得所述降速传动机构170驱动所述太阳轮162(图18),在该工作位置a中,所述枢转支承体14相对于所述引导体40,关于围绕枢转轴线22的转动运动而被阻转装置阻转,换而言之,所述操控体52在引导方向58上径向地远离所述枢转轴线22向外移动所述阻转体54,使得它们嵌入容纳部60并且借此相对于所述引导体40阻转地固定所述枢转支承体14。
326.这又驱动所述行星齿轮146,由于所述枢转支承体14关于围绕枢转轴线22的转动运动而被所述阻转装置50阻转,所以行星齿轮146同样受阻,从而所述驱动体194的驱动臂196无法相对于贴靠体226、228旋扭,并且和所述行星齿轮承载部152抗扭相连的引导轴100的转动运动因此同样无法进行。
327.借此进行所述内齿圈142的驱动,使得该内齿圈根据图18在所述转动方向292上旋扭。首先,所述内齿圈142的该转动使保险装置330受到操控,其中,通过移动所述保险销294,所述保险体322离开所述操控体52的保险凹部324并且由所述保险位置进入所述取消保障位置(图19)。所述内齿圈142的继续转动使所述滑槽轨道288如图19、图20所示的那样不再作用于所述触头286并因此允许所述触头在远离所述法兰104的方向上的移动,从而所述静止位置锁止装置270被激活,而不发生所述阻转装置50的操控体52的转动。
328.如图21至图22所示,接着发生的是,所述驱动壳套122通过所述驱动部缝隙156和驱动部指销158旋扭,所述驱动壳套通过所述突出部124与所述操控体52抗扭地相连。
329.借此,通过所述内齿圈142,所述操控体52从所述阻转位置出来,在其松开位置的方向上旋扭,而且直至所述松开位置被达到。
330.因为所述枢转支承体14可能在所述操控体52的松开位置被达到时转动运动,并且此外所述操控体52在转动方向72上的转动运动由于所述内齿圈142的影响而受到阻碍,故所述分配传动机构130的内齿圈142保持不动,而所述行星齿轮146从现在开始转动,该行星齿轮能够通过所述枢转驱动轴100和具有所述驱动臂196的驱动体194来使所述枢转支承体14围绕所述枢转轴线22朝向所述静止位置r的方向枢转。
331.在所述静止位置r被达到时,所述静止位置锁止装置270是激活的,换而言之这是通过以下方式实现的,即所述锁止体274能够嵌入所述锁止孔282,并且能够借助所述操控销294在所述滑槽轨道288的方向上移动所述触体254。
332.借此,通过所述静止位置锁止装置270,所述枢转支承体14锁止在和所述球颈10的静止位置r的对应的转动位置中。
333.在该静止位置中,此时关掉所述驱动单元。
334.如果所述球颈10由所述静止位置r向回枢转进入所述工作位置a,那么所述驱动单元以相反的转动方向运行。
335.因为所述枢转支承体214由于激活的静止位置锁止装置270而无法枢转,所以所述分配传动机构130在所述转动方向312上驱动所述内齿圈142,该内齿圈如图23所示借助所述滑槽轨道288对所述操控销294施加影响,从而该销对所述静止位置锁止装置270去激活。
336.因为所述操控体52由于有效的阻止面90而无法旋扭,所以所述分配传动机构130使所述行星齿轮承载部152进行转动运动,该行星齿轮承载部通过所述枢转驱动轴100来驱动具有所述驱动臂196的驱动体194,并且连同所述球颈10朝向工作位置a方向上的枢转使所述枢转支承体14枢转。
337.例如如图20所示,在工作位置a被达到时,以已经描述的方式不再阻止所述操控体52,以便在所述扭力弹簧114在阻转位置的方向上的影响下进行转动方向72上的运动,其中,通过所述操控体52,径向相对所述枢转轴线22向外地将所述阻转体54压进所述容纳部60中,并且所述阻转体54因此又使所述枢转支承体14相对于所述引导体40受到阻转(图24)。
338.在所述枢转支承体14相对于所述引导体40定位的位置,所述行星齿轮承载部152的转动运动又受阻,从而所述内齿圈142继续转动、而且进入图18中示出的起始位置,在该起始位置中,所述操控体52在所述扭力弹簧114的影响下能够在所述转动方向72上实施进一步的转动运动,从而所述内齿圈142在所述工作位置a中不阻碍调整,所述调整通过所述操控体52在所述扭力弹簧114的影响下在转动方向72上的继续转动实现。
339.此外,在所述操控体52过渡进入阻转位置后,所述保险装置330是有效的,从而具有所述保险体322的所述保险销294嵌入所述操控体52的保险凹部324,并且防止该操控体过渡进入松开位置。
340.可由所述保险销294的延伸部342操控的触键344是设置在传感器承载部360上的机械的按键开关362的一部分、或者是设置在传感器承载部360上的电子的按键开关362的一部分。
341.此外,如图25、图26所示,还有所述转速传感器364设置在所述传感器承载部360上,该转速传感器探测设置于所述驱动马达180的从动轴182上的磁铁366的转速,以便因此直接探测所述驱动马达180的从动轴182的转速。
342.在所述传感器承载部360上还额外地设置用于探测所述枢转单元s中的温度的温度传感器368。
343.此外,如图26所示,所述传感器承载部360同样用于容纳枢转运动传感器372,通过在所述枢转驱动轴100的轴端166的末端侧上设置磁铁374,该枢转运动传感器探测所述枢转驱动轴100的转动位置、并因此探测直接和所述球颈10相连的所述枢转支承体14的转动位置。因此,在所述传感器承载部360上总共设置具有触键344的按键开关362、转速传感器364和枢转运动传感器372。
344.在此,如图6、图7所示,所述传感器承载部360位于所述内齿圈172和所述降速传动机构170的蜗轮178之间,其中,将所述蜗轮178和所述小齿轮176直接连在一起的连接件376穿过所述传感器承载部360的破口378。
345.通过所述传感器承载部360在所述降速传动机构170中集成地设置,能将所述按键开关362、转速传感器364、枢转运动传感器372和温度传感器368设置在唯一的传感器承载部360上,并且因此能通过该传感器承载部360上的传感器来简单地探测所述阻转装置50的
功能、所述驱动马达180的转速和所述球颈10围绕所述枢转轴线22的枢转位置,并且能将由所述传感器、功能传感器362、转速传感器364和枢转运动传感器372提供的值以简单的方式转发给用于所述枢转单元s的功能的控制部380。
346.在此特别有利的是,所述传感器承载部360横向于、尤其垂直于所述枢转轴线22延伸,并且可在此节省空间地集成在所述枢转单元s中、尤其集成在所述降速传动机构170中,从而可获得分配传动机构130驱动侧的和所述驱动马达180从动侧的所有传感器的数据。
347.关于所述枢转控制单元380的设置,在根据本发明的解决方案中存在非常多样的可能性。
348.原则上可想到的是,将所述枢转控制单元380设置在单独的壳体中。
349.然而,一种有利的解决方案规定,所述枢转控制单元380集成在所述枢转单元的总壳体400中。
350.在此,如图6、图7所示,所述总壳体400包围所述枢转支承单元20、所述阻转装置50、所述分配传动机构130和所述降速传动机构170,它们设置在枢转运行壳体部段402中,该枢转运行壳体部段尤其部分地通过和紧固在车辆上的所述承载盘26固定相连的引导体40构造。
351.在此,所述枢转支承体14在引导体40设有所述法兰104的侧上从上方接在所述引导体40上并且遮盖所述引导体40,此外,所述引导体40在其对置于所述法兰104的一侧上被所述承载体404部分地遮盖,该承载体同样构造所述枢转运行壳体部段402的部分,其中,如图6、图7所示,所述承载体404容纳、支承具有所述传感器承载部360的所述降速传动机构170,并且此外构造用于所述驱动马达180的容纳部406。
352.此外,同样如图28所示,所述承载体404构造用于所述总壳体400的马达壳体部段408的容纳部。
353.在根据本发明的枢转单元s的第一变型实施方式中,所述枢转控制单元380集成地设置在所述传感器承载部360上,从而例如所述传感器承载部360同时还是用于所述控制电路384的电路板382,该电路板例如作为数据处理单元承载处理器386和马达驱动电路388。
354.在此,所述驱动马达180例如通过端子392与其端子线路394相连。
355.此外,在该情形中,所述电路板382共承载三个插接接触销396,其中,所述插接接触销396中的两个插接接触销设置用于输入电源电压 、-,并且所述插接接触销396中的一个插接接触销设置用于连接到所述车辆的总线系统。
356.因此,整个枢转单元s能在其所有的功能中通过所述总线端子b控制,其中,整个所述枢转控制单元380集成在所述枢转运行壳体部段402中,并且尤其设置在所述分配传动机构130的驱动侧、优选地集成在所述降速传动机构170中。
357.根据本发明的所述枢转控制单元380例如像图30示意性示出的那样工作。
358.当用于启动所述球颈10由工作位置a到静止位置r的枢转移动是信号通过所述总线系统侧的总线端子b出现时,在所述枢转控制单元380侧并且通过所述处理器386和马达驱动电路388来开启所述驱动马达180,并且开始借助所述蜗杆184驱动所述从动轴182。
359.这首先不导致所述枢转支承体14的移动,因为该枢转支承体通过所述阻转装置50受到阻转,并且因为所述操控体52如图18所示的那样在引导方向58上径向向外移动所述阻转体54,使得这些阻转体嵌入所述容纳部60。
360.然而,所述蜗杆184驱动所述降速传动机构170并且该降速传动机构驱动所述太阳轮162。
361.在此,所述处理器386通过所述转速传感器364识别呈现所述驱动马达180的转速的信号。
362.通过所述太阳轮162,所述行星齿轮146受到驱动,而这些行星齿轮自身并不围绕所述枢转轴线22转动,因为所述枢转支承体14关于转动运动一直受阻,从而从中导致对所述内齿圈142的驱动,所述内齿圈如图18通过所述转动方向292示出的那样旋扭、并且操控所述保险装置330,借此,所述保险销294如图19、图20所示的那样被移动。
363.借此,针对所述操控体52的旋扭的保险瓦解,并且所述触键344通过所述保险销294的移动受到操控,这通过所述按键开关362识别,借此,按键开关发出与解开所述保险装置330相应的零信号。
364.如图21、图22所示,在所述保险装置330松开之后,所述驱动壳套122通过所述驱动部缝隙156和驱动部指销158发生旋扭,所述驱动壳套借助所述突出部124与所述操控体52相连,并因此通过所述分配传动机构130的内齿圈142驱动所述操控体52发生旋扭,从而所述操控体52从所述阻转位置移出,并且从现在起,并且如图21所示的那样,所述阻转体54能在所述松开位置被达到时开放所述枢转支承体14受到的阻转。
365.在所述操控体52的松开位置中,操控体的转动运动受阻,从而所述分配传动机构130的内齿圈142保持不动,并且从现在起,所述分配传动机构130开始转动所述行星齿轮146、并借此开始转动所述枢转驱动轴100,并且所述枢转支承体14因此同样开始转动,其中,通过所述枢转运动传感器372探测所述枢转支承体14的转动运动,该枢转运动传感器随即如图30所示的那样探测所述球颈10由工作位置a到静止位置r的枢转运动的走向。
366.在此能以非常多样的方式通过所述控制电路384来探测所述静止位置r是否被达到。
367.要么可能使用由所述枢转运动传感器372收到的信号、以便探测所述静止位置r,要么可能通过所述马达驱动电路388来探测用于供应给驱动马达180的电流i的强势增大、并且以此为契机关掉所述驱动马达180,电流的所述增大在所述静止位置被达到并且所述静止位置锁止装置270有效时发生。
368.因此,所述处理器386可识别所述静止位置已被达到。
369.为了通过所述端子b向所述总线系统反馈所述球颈到达静止位置r,所述处理器386例如将通过所述马达驱动电路388探测到的电流增大纳入考量,和/或将所述枢转运动传感器372的、报告静止位置r被达到的信号纳入考量。
370.对此备选的同样还有以下可能性,即为所述静止位置锁止装置270配属一个探测所述静止位置锁止装置270有效性的传感器。
371.因再次通过端子b上的、经所述总线系统到达的启动信号启动,所述球颈10由静止位置向回枢转到工作位置a,这个时候所述控制电路384首先借助于所述枢转运动传感器372识别所述球颈10处于所述静止位置r。
372.在该情形中,所述驱动马达182同样却以相反的转动方向启动。
373.因为所述枢转支承体14由于激活的静止位置锁止装置270而不可能枢转,所以所述分配传动机构130如图23、图24所示的那样在相反的转动方向312上驱动所述内齿圈142。
374.这使得所述静止位置锁止装置270首先在所述球颈10没有转动运动的情形下被去激活,而且是通过承载所述滑槽轨道288的所述内齿圈142的旋扭实现的。
375.此外,所述操控体52的旋扭例如由于有效的阻止面90而同样受阻,从而在所述静止位置锁止装置270松开之后,所述分配传动机构130使所述行星齿轮承载部152通过所述枢转驱动轴100进行转动运动,并且因此同样使所述球颈10朝向所述工作位置a的方向进行转动运动。
376.如图24所示,就在所述工作位置a被达到之前不久,所述操控体52不再受阻,从而它在所述扭力弹簧114的影响下转移进入阻转位置,同样如图24所示,还是就在所述工作位置a被达到之前不久,所述保险装置330又进入在工作位置a中保障阻转位置中的操控体52的位置,这同样由所述按键开关362识别。
377.在所述工作位置a中,现在能以静止位置r中那样的相同的方式关掉所述控制电路384侧的所述驱动马达180,具体方式为,所述处理器386通过所述马达驱动电路388探测用于所述驱动马达180的电流,并且基于电流增大来识别所述工作位置被达到。
378.而同样可能的是,借助于所述处理器386查询所述枢转运动传感器372,并且识别与所述工作位置a相应的转动位置,并且以此为契机关掉所述驱动马达180。
379.为了现在通过所述端子b给所述总线系统转达所述球颈10已经安全到达工作位置a的消息,例如将所述枢转运动传感器372的信息纳入考量和/或将所述按键开关362的信号纳入考量,并且在一定情形下同样还将由所述马达驱动电路388探测到的、工作位置a被达到时发生的电流增大纳入考量。
380.但在根据本发明的控制电路384中,同样还可实施其它功能。
381.例如,所述控制电路384能够通过所述枢转运动传感器372来识别所述球颈10的枢转运动的故障,并且尤其在一定情形下通过和所述按键开关362的信号相比较和/或同样结合通过所述马达驱动电路388探测到的电流消耗来识别所述球颈10已经枢转,以及所述球颈10在一定情形选是否撞到了障碍物、即物体。
382.在该情形中,例如对所述处理器386编程,使得它将所述驱动马达180的电流供应反转,并且在相反的方向上向回移动所述球颈、尤其将其移入起始位置,换而言之,要么将其移入工作位置a、要么将其移入静止位置r。
383.在考虑通过所述枢转运动传感器372探测到的球颈10相对于工作位置a或者相对于静止位置r的位置的情形下,此外还可能的是,自行预设所述球颈10的枢转运动的走向,例如通过直接在枢转运动启动之后增大的角速度、在工作位置a和静止位置r之间的运动阶段中的恒定的角速度、在所述工作位置或者静止位置被达到前不久的减小的角速度,从而能借此在工作位置或静止位置被达到时减小机械的负载以及同样减小例如噪音负担。
384.如图31所示,在根据本发明的枢转单元s的第二变型实施方式中规定,所述传感器承载部360就像在第一实施例中描述的那样,留在所述降速传动机构170的区域中,并且承载所述按键开关362、转速传感器364和枢转运动传感器372。
385.在该情形中,包括设有所述控制电路384的电路板382的所述枢转控制单元380设置在所述总壳体400的马达壳体部段408中,并且例如直接保持在所述驱动马达180上。
386.在该情形中,借助于线路412进行与所述传感器承载部360的连接和与设置在该传感器承载部上的按键开关362、转速传感器364和枢转运动传感器372的连接。
387.在此,如结合所述第一变型实施方式所描述的那样,所述枢转控制单元380的功能保持相同。
388.如图32所示,在第三变型实施方式中,所述枢转控制单元380以和第一变型实施方式中相同的方式设置在所述传感器承载部360上,其中,在例如由所述承载体404保持的所述马达壳体部段408中还额外设有插口控制单元420,该插口控制单元用于控制设置在球颈上的插口34的各个触点422。
389.用于拖挂车或者要固定在球颈10上的载体单元的普通插口34的各个触点422例如包括用于左灯/右灯、左闪灯/右闪灯、后雾灯、刹车灯和倒车灯的照明触点424,还包括至少一个用于所有照明单元的接地端。
390.所述触点424额外还包括用电器触点426,例如常正极、用于电池的充电线路和用于这样的用电器的额外的接地触点。
391.所述插口控制单元420包括插口控制电路432,其设置在插口控制电路板434上,该电路板包括至少一个处理器436和一个或者多个触点控制电路438(图33)。
392.此外,所述插口控制电路432设有端子442,包括两个供电端子 、-以及总线端子bs,通过该总线端子,经总线系统传送的功能信号进入。
393.根据在所述总线端子bs上进入的功能信号,所述插口控制电路432的处理器436反应如下。
394.只要在所述总线端子bs上进入的功能信号报告所述车辆的运行状态,那么所述处理器436就借助于所述触点控制电路438永久性地通过以下方式监测所述照明触点424,即对不同的照明触点424和与之相连的照明器的接地之间的电阻进行检测。
395.如果所述处理器436在对照明器的永久性监测中确定,一个或者数个照明器具有寻常运行条件以外的通过电阻,那么所述处理器436就在所述端子bs上为所述总线系统生成反馈。
396.根据具体的功能信号,如果要控制各照明器,例如要控制左闪灯或右闪灯或者左灯或右灯等,那么所述处理器436会通过所述触点控制电路438使这些照明器通电,但同时监测这些照明器的的电流消耗,以便例如识别短路。
397.如果所述处理器436确定所述照明器在无故障地运行,那么所述处理器436会在所述总线端子bs上给所述总线系统生成相应的反馈。
398.所述处理器436以如下相同的方式监测用电器触点,即监测所述用电器是否已接上、以及该用电器具有多大的功能运行能力,并且在所述总线端子bs上为所述总线系统生成相应的反馈。
399.根据本发明的插口控制单元420和根据本发明的枢转控制单元380基本上能够共同通过总线端子、例如通过所述枢转插口控制单元420的总线端子bs与所述车辆的总线系统交流、例如与can总线交流。
400.如根据图34的第四变型实施方式所示,对此备选地同样存在如下可能性,即所述插口控制单元420
′
通过所述总线端子bs与所述车辆总线、例如与所述车辆的can总线交流,并且所述枢转控制单元380如图34所示的那样通过单独的各端子444与所述枢转控制单元380交流,以便控制枢转运动,所述端子444同样包括供电端子 、-和总线端子b。
401.在该情形中,所述插口控制单元420
′
例如通过所述总线端子bs与所述车辆的can
总线相连,而所述插口控制单元420
′
通过所述端子444经lin总线利用所述总线端子b与所述枢转控制单元380交流,其中,所述端子444包括供电端子 、-和所述总线端子b,并且与所述枢转控制单元380的端子396相连。
402.在该情形中,所述插口控制单元420以第三变型实施方式种描述的相同的方式运行,但还具有用于通过lin总线系统与所述枢转控制单元380交流的处理器446。
403.在此,所述处理器446将信号传送到所述枢转控制单元380,并且同样将来自所述枢转控制单元380、通过所述lin总线到达的反馈传递给所述can总线系统的总线端子bs,所述信号在所述总线端子bs上、尤其由所述can总线系统传送。
404.此外,所述第四变型实施方式以结合前述各实施例描述的相同的方式运行,从而可在全部内容上参考前述各实施例。
405.如图35所示,在第五变型实施方式中以如同结合前述实施例所描述的那样的相同的方式构造所述枢转单元s。
406.如同结合前述变型实施方式所描述的那样,所述枢转控制单元380尤其同样以相同的方式设置在所述枢转单元s中并且以相同的方式工作。
407.与前述变型实施方式相反,所述插口控制单元420
′
并没有设置在所述马达壳体部段408中,而是设置在所述球颈10上、而且是设置在所述球颈10的、连接到第一末端12上的部段32的区域中并且是设置在所述第一末端12和所述插口34之间(图35)。
408.对此,尤其在所述球颈10中设置凹处452,该凹处容纳所述插口控制单元420
′
,从而所述插口控制单元420
′
尤其得到保护、免于受到作用于球颈10的外部影响,并且设置在插口34旁边的所述凹处452中。
409.例如通过如下方式设有所述凹处452,使得所述球颈10通过具有上纵向撑杆462和下纵向撑杆464的承载结构466构造,所述凹处452设置在所述上纵向撑杆和下纵向撑杆之间。
410.此外,所述承载结构466优选地同样还构造插口容纳部468,所述插口34置于该插口容纳部中。
411.借此,用于所述照明触点424和用电器触点426的触点端子422尤其以简单的方式与设置在所述插口34中的相应触点相连。
412.此外,所述插口控制单元420
′
通过所述总线端子bs与所述车辆总线系统相连,并且同样通过所述供电触点 、-与车辆总线系统相连。
413.此外,如同结合第四实施例已阐述的那样通过所述端子444进行和所述枢转控制单元380的连接。
414.所述插口控制单元420
′
的整个的功能在此与插口控制单元420
′
的结合第三、第四实施例描述的功能相符。
415.在该实施例中,为了对所述插口控制单元420
′
进行特别的保护,所述球颈10优选地还设有遮盖部454,该遮盖部至少部分地、优选全部地从上方接在所述凹处452上,并且因此还为所述凹处452中的所述插口控制单元420
′
提供额外的保护,尤其同样为所述插口34的触点和插口控制单元420
′
的触点端子422之间的连接提供额外的保护。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。