1.本发明涉及一种真空吸附系统。
背景技术:
2.在现有技术中,通常采用真空吸嘴来拾取电子器件,例如,芯片。由于电子器件受力容易损坏,因此,如果真空吸嘴在吸附电子器件时施加在电子器件上的接触力(不是施加在电子器件上的真空吸附力)过大时,会导致电子器件受损。但是,现有的真空吸嘴都不能控制该接触力。
技术实现要素:
3.本发明的目的旨在解决现有技术中存在的上述问题和缺陷的至少一个方面。
4.根据本发明的另一个方面,提供一种真空吸附系统,包括:气缸,包括缸体和安装在所述缸体中的活塞和活塞杆;和真空压力控制装置,用于控制所述缸体的内腔中的真空压力p。在所述活塞杆上形成有用于吸附物体的真空吸孔,所述真空吸孔与所述内腔连通;所述真空压力控制装置适于通过控制所述内腔中的真空压力p,使得所述活塞杆在吸附所述物体时施加在所述物体上的接触力f不大于预定接触力。
5.根据本发明的一个实例性的实施例,所述真空吸附系统还包括真空发生装置,所述真空发生装置的负压接口通过连接管路连接至所述缸体,以与所述缸体的内腔连通。所述真空压力控制装置包括阀门,所述阀门安装在所述真空发生装置上,用于控制所述真空发生装置产生的真空压力p的大小。
6.根据本发明的另一个实例性的实施例,所述活塞将所述缸体的内腔分隔成第一真空室和第二真空室;所述活塞杆位于所述缸体的第二真空室中,具有连接至所述活塞的内端和从所述缸体伸出的外端。
7.根据本发明的另一个实例性的实施例,所述气缸还包括设置在所述第一真空室中的弹簧,所述弹簧的两端分别连接至所述缸体和所述活塞;所述真空压力控制装置还包括控制器,所述控制器适于根据所述弹簧的拉伸量δl控制所述阀门的开口量,以控制所述真空压力p。
8.根据本发明的另一个实例性的实施例,当所述弹簧的拉伸量δl不大于预定拉伸量时,所述活塞杆在吸附所述物体时施加在所述物体上的接触力f不大于所述预定接触力;所述真空压力控制装置适于通过控制所述内腔中的真空压力p,使得所述弹簧的拉伸量δl不大于所述预定拉伸量。
9.根据本发明的另一个实例性的实施例,所述真空压力控制装置还包括高度传感器,所述高度传感器安装在所述缸体上,用于检测所述活塞的当前高度h;所述控制器适于根据下面的公式计算所述弹簧的拉伸量δl,
10.δl=h0–
h其中,
11.h0是指当所述弹簧处于初始长度l0时所述活塞所处的高度。
12.根据本发明的另一个实例性的实施例,所述真空压力控制装置还包括长度传感器,所述长度传感器安装在所述缸体上,用于检测所述弹簧的当前长度l;所述控制器适于根据下面的公式计算所述弹簧的拉伸量δl,
13.δl=l
–
l0其中,
14.l0为所述弹簧的初始长度。
15.根据本发明的另一个实例性的实施例,所述真空压力控制装置适于将所述内腔中的真空压力p控制成等于预定真空压力,使得所述活塞杆在吸附所述物体时施加在所述物体上的接触力f等于零。
16.根据本发明的另一个实例性的实施例,当所述活塞杆在吸附所述物体时施加在所述物体上的接触力f等于零时,所述弹簧的伸长量δl等于零。
17.根据本发明的另一个实例性的实施例,所述真空吸孔与所述第一真空室和所述第二真空室中的一个连通,但与所述第一真空室和所述第二真空室中的另一个不连通。
18.根据本发明的另一个实例性的实施例,所述真空吸孔轴向贯穿所述活塞杆和所述活塞,以与所述第一真空室连通。
19.根据本发明的另一个实例性的实施例,所述真空吸孔轴向贯穿所述活塞杆并经由形成在所述活塞杆上的连接孔与所述第二真空室连通。
20.根据本发明的另一个实例性的实施例,在所述缸体上形成有与所述第一真空室连通的第一接口和与所述第二真空室连通的第二接口;所述真空发生装置的负压接口通过所述连接管路连接至所述缸体的第一接口和第二接口;所述第一真空室、所述第二真空室和所述真空吸孔中的真空压力p相等。
21.根据本发明的另一个实例性的实施例,所述气缸还包括:第一密封圈,设置在所述活塞和所述缸体之间,以密封两者之间的配合界面;和第二密封圈,设置在所述活塞杆和所述缸体之间,以密封两者之间的配合界面。
22.根据本发明的另一个实例性的实施例,所述物体为电子器件,所述活塞杆构成吸附所述电子器件的真空吸嘴。
23.在根据本发明的前述各个实例性的实施例中,能够通过控制气缸内的真空压力来控制活塞杆施加在物体上接触力,使得施加在物体上接触力不大于预定接触力,甚至可以等于零,从而能够避免物体受损。
24.通过下文中参照附图对本发明所作的描述,本发明的其它目的和优点将显而易见,并可帮助对本发明有全面的理解。
附图说明
25.图1显示根据本发明的一个实例性的实施例的真空吸附系统的示意图;
26.图2显示图1所示的真空吸附系统的气缸吸附物体时的示意图;
27.图3显示根据本发明的另一个实例性的实施例的真空吸附系统的气缸的示意图。
具体实施方式
28.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的
说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种限制。
29.另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本披露实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
30.根据本发明的一个总体技术构思,提供一种真空吸附系统,包括:气缸,包括缸体和安装在所述缸体中的活塞和活塞杆;和真空压力控制装置,用于控制所述缸体的内腔中的真空压力p。在所述活塞杆上形成有用于吸附物体的真空吸孔,所述真空吸孔与所述内腔连通;所述真空压力控制装置适于通过控制所述内腔中的真空压力p,使得所述活塞杆在吸附所述物体时施加在所述物体上的接触力f不大于预定接触力。
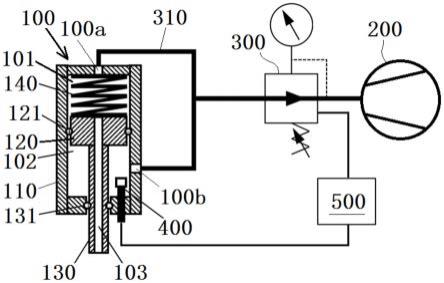
31.图1显示根据本发明的一个实例性的实施例的真空吸附系统的示意图;图2显示图1所示的真空吸附系统的气缸100吸附物体10时的示意图。
32.如图1和图2所示,在图示的实施例中,该真空吸附系统主要包括气缸100和真空压力控制装置。气缸100包括缸体110和安装在缸体110中的活塞120和活塞杆130。活塞杆130连接至活塞120,活塞120和活塞杆130可相对于缸体110轴向移动。真空压力控制装置用于控制缸体110的内腔101、102中的真空压力p。
33.如图1和图2所示,在图示的实施例中,在活塞杆130上形成有用于吸附物体10的真空吸孔103。该真空吸孔103与缸体110的内腔101、102连通,使得真空吸孔103和缸体110的内腔101、102中的真空压力p相等。
34.如图1和图2所示,在图示的实施例中,真空压力控制装置适于通过控制内腔101、102中的真空压力p,使得活塞杆130在吸附物体10时施加在物体10上的接触力f不大于预定接触力。这样,可以防止物体10因受到过大的接触力f而受损。
35.请注意,在图示的实施例中,接触力f是指活塞杆130将物体10推压在支撑台20上的推压力,不是活塞杆130上的真空吸孔103施加在物体10上的真空吸附力。一旦被吸附的物体10离开支撑台20,接触力f就会消失。
36.在有些应用情况中,物体10不允许受到过大的接触力f,例如,当物体10为电子器件时,特别是高精度芯片时,就希望接触力f越小越好,最好等于零。在图示的实施例中,具有真空吸孔103的活塞杆130构成了吸附电子器件的真空吸嘴。
37.如图1和图2所示,在图示的实施例中,真空吸附系统还包括真空发生装置200。该真空发生装置200可以为真空泵或真空发生器。真空发生装置200的负压接口通过连接管路310连接至缸体110,以与缸体110的内腔101、102连通。
38.如图1和图2所示,在图示的实施例中,真空压力控制装置包括阀门300。该阀门300安装在真空发生装置200上,用于控制真空发生装置200产生的真空压力p的大小。
39.如图1和图2所示,在图示的实施例中,活塞120将缸体110的内腔101、102分隔成第一真空室101和第二真空室102。活塞杆130位于缸体110的第二真空室102中。活塞杆130具有连接至活塞120的内端和从缸体110伸出的外端。
40.如图1和图2所示,在图示的实施例中,气缸100还包括设置在第一真空室101中的弹簧140。弹簧140的两端分别连接至缸体110和活塞120。
41.如图1和图2所示,在图示的实施例中,在缸体110上形成有与第一真空室101连通的第一接口100a和与第二真空室102连通的第二接口100b。真空发生装置200的负压接口通
过连接管路310连接至缸体110的第一接口100a和第二接口100b。这使得第一真空室101、第二真空室102和真空吸孔103中的真空压力p相等。
42.如图1和图2所示,在图示的实施例中,活塞杆130施加在物体10上的接触力f其实就是施加在活塞120和活塞杆130上的合力,该合力可以根据下面的公式计算:
43.f=g p*s
2-p*s
1-k*δl
44.其中,
45.g为活塞120和活塞杆130的重量;
46.s1为活塞120在第一真空室101中的第一受力面积;
47.p*s1为第一真空室101施加在活塞120上的真空吸力;
48.s2为活塞120在第二真空室102中的第二受力面积;
49.p*s2为第二真空室102施加在活塞120上的真空吸力;
50.k为弹簧140的刚度;
51.δl为弹簧140的拉伸量。
52.如图1和图2所示,在图示的实施例中,活塞120的第一受力面积s1大于活塞120的第二受力面积s2。
53.如图1和图2所示,在图示的实施例中,当活塞杆130施加在物体10上的接触力f大于零时,弹簧140的拉伸量δl大于零。当活塞杆130施加在物体10上的接触力f等于零时,弹簧140的拉伸量δl等于零。因此,可以通过控制弹簧140的拉伸量δl来控制活塞杆130施加在物体10上的接触力f。
54.如图1和图2所示,在图示的实施例中,真空压力控制装置还包括控制器500,该控制器500适于根据弹簧140的拉伸量δl控制阀门300的开口量,以控制真空压力p。
55.如图1和图2所示,在图示的实施例中,当弹簧140的拉伸量δl不大于预定拉伸量时,活塞杆130在吸附物体10时施加在物体10上的接触力f不大于预定接触力。真空压力控制装置适于通过控制内腔101、102中的真空压力p,使得弹簧140的拉伸量δl不大于预定拉伸量。
56.如图1和图2所示,在图示的实施例中,真空压力控制装置还包括高度传感器400。高度传感器400安装在缸体110上,用于检测活塞120的当前高度h。控制器500适于根据下面的公式计算弹簧140的拉伸量δl,
57.δl=h0–
h其中,
58.h0是指当弹簧140处于初始长度l0时活塞120所处的高度。请注意,这两个数值h0和l0是已知的,可以预先获得。
59.请注意,本发明不局限于图示的实施例,例如,在本发明的另一个实例性的实施例中,真空压力控制装置可以包括长度传感器,该长度传感器安装在缸体110上,适于检测弹簧140的当前长度l。此时,控制器500可以根据下面的公式计算弹簧140的拉伸量δl,
60.δl=l
–
l0其中,
61.l0为弹簧140的初始长度。
62.如图1和图2所示,在本发明的一个实例性的实施例中,真空压力控制装置适于将缸体110的内腔101、102中的真空压力p控制成等于预定真空压力,使得活塞杆130在吸附物体10时施加在物体10上的接触力f等于零。
63.如图1和图2所示,在图示的实施例中,当活塞杆130在吸附物体10时施加在物体10上的接触力f等于零时,弹簧140的伸长量δl等于零。因此,如前所述,可以通过真空压力控制装置将弹簧140的伸长量δl控制成等于零,就可以使得活塞杆130在吸附物体10时施加在物体10上的接触力f等于零。
64.如图1和图2所示,在图示的实施例中,高度传感器400和控制器500构成了一个闭环反馈控制系统,从而能够将气缸100的内腔101、102中的真空压力p控制成等于预定真空压力,使得活塞杆130在吸附物体10时施加在物体10上的接触力f等于零。
65.如图1和图2所示,在图示的实施例中,活塞杆130上的真空吸孔103与第一真空室101和第二真空室102中的一个连通,但与第一真空室101和第二真空室102中的另一个不连通。
66.如图1和图2所示,在图示的实施例中,真空吸孔103轴向贯穿活塞杆130和活塞120,以与第一真空室101连通。
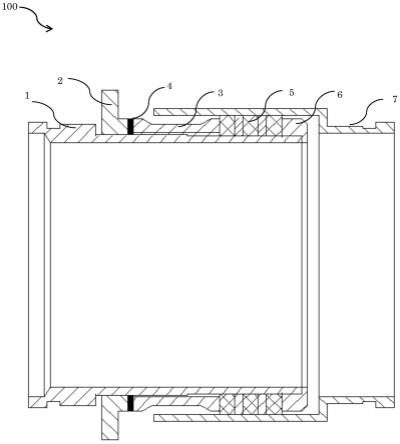
67.但是,请注意,本发明不局限于图示的实施例,例如,图3显示根据本发明的另一个实例性的实施例的真空吸附系统的气缸100的示意图。
68.如图3所示,在图示的实施例中,真空吸孔103轴向贯穿活塞杆130并经由形成在活塞杆130上的连接孔130a与第二真空室102连通。
69.如图1和图2所示,在图示的实施例中,气缸100还包括:第一密封圈121和第二密封圈122。第一密封圈121设置在活塞120和缸体110之间,以密封活塞120和缸体110之间的配合界面。第二密封圈122设置在活塞杆130和缸体110之间,以密封活塞杆130和缸体110之间的配合界面。
70.本领域的技术人员可以理解,上面所描述的实施例都是示例性的,并且本领域的技术人员可以对其进行改进,各种实施例中所描述的结构在不发生结构或者原理方面的冲突的情况下可以进行自由组合,这些变化理应落入本发明的保护范围以内。
71.虽然结合附图对本发明进行了说明,但是附图中公开的实施例旨在对本发明优选实施方式进行示例性说明,而不能理解为对本发明的一种限制。
72.虽然本发明的总体构思的一些实施例已被显示和说明,本领域普通技术人员将理解,在不背离本发明的总体构思的原则和精神的情况下,可对这些实施例做出改变,本发明的范围以权利要求和它们的等同物限定。
73.应注意,措词“包括”不排除其它元件或步骤,措词“一”或“一个”不排除多个。另外,权利要求的任何元件标号不应理解为限制本发明的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。