1.本公开涉及一种半导体带材磨削装置。更具体地,本公开涉及一种用于磨削半导体带材的保护模塑层以减小半导体带材厚度的半导体带材磨削装置。
背景技术:
2.可通过将半导体裸芯结合在诸如印刷电路板或引线框架的基板上的裸芯结合工艺和使用诸如环氧树脂的模塑树脂来封装半导体裸芯的模塑工艺来制造半导体带材。
3.可使用半导体带材磨削装置来磨削和去除由模塑树脂制成的保护模塑层的表面部分,以将半导体带材的厚度减小到预定厚度。半导体带材磨削装置可包括用于支撑半导体带材的卡盘台和用于磨削和去除半导体带材的表面部分的磨削单元。
技术实现要素:
4.本公开提供了一种能够提高生产率的改进的半导体带材磨削装置。
5.根据本公开的一些实施例,半导体带材磨削装置可包括:配置为支撑半导体带材的卡盘台,配置为磨削由卡盘台支撑的半导体带材的表面部分的磨削单元,以及配置为在将半导体带材装载到卡盘台上或从卡盘台卸载半导体带材时修整磨削单元的修整单元。
6.根据本公开一些实施例,半导体带材磨削装置还可包括:配置为在磨削单元下方的处理区域和与处理区域隔开的装卸区域之间水平移动卡盘台的第一水平驱动部,半导体带材在该装卸区域中进行装载和卸载,以及配置为在处理区域和与处理区域隔开的备用区域之间水平移动修整单元的第二水平驱动部。
7.根据本公开一些实施例,第一水平驱动部和第二水平驱动部可配置为同轴移动卡盘台和修整单元。
8.根据本公开一些实施例,半导体带材磨削装置还可包括配置为在磨削半导体带材时测量半导体带材的厚度的厚度测量单元。
9.根据本公开一些实施例,半导体带材磨削装置还可包括配置为在磨削半导体带材之后测量半导体带材的厚度的第二厚度测量单元。
10.根据本公开一些实施例,半导体带材磨削装置还可包括配置为在磨削半导体带材时或之后清洁半导体带材的带材清洁单元。
11.根据本公开一些实施例,磨削单元可包括用于磨削半导体带材的表面部分的多个磨石、安装有磨石的砂轮以及配置成旋转砂轮的旋转驱动部。在这种情况下,磨石可沿着砂轮的下边缘部分周向布置。
12.根据本公开一些实施例,半导体带材磨削装置还可包括设置在磨削单元下方并配置为清洁磨石的磨石清洁单元。
13.根据本公开一些实施例,修整单元可包括设置在砂轮下方的修整轮,以及配置为使修整轮旋转的第二旋转驱动部。
14.根据本发明一些实施例,记录砂轮id信息的信息标签可附接至砂轮,并且配置成
读取信息标签中记录的砂轮id信息的读取器可安装在旋转驱动部上。
15.根据本公开一些实施例,半导体带材磨削装置还可包括:配置为从配置为接收多个半导体带材的料仓中抽出半导体带材的带材抽出单元,从料仓中抽出的半导体带材放置其上并配置为真空吸附半导体带材下表面的真空台,以及配置成拾取放置在真空台上的半导体带材并将其转移到卡盘台上的带材输送单元。
16.根据本公开一些实施例,真空台可配置为可沿竖直方向移动,带材输送单元可包括配置为可沿竖直方向移动并真空吸附半导体带材的上表面以拾取半导体带材的真空拾取器,通过升高真空台和降低真空拾取器,半导体带材可在紧密接触在真空台和真空拾取器之间的状态下从真空台转移到真空拾取器。
17.根据如上所述的本公开实施例,对于磨削单元的修整步骤可在将半导体带材装载到卡盘台上或从卡盘台卸载半导体带材时由修整单元执行。因此,不需要额外的时间来对磨削单元进行修整步骤,因此可极大地增加半导体带材磨削装置的每小时吞吐量。进一步地,厚度测量单元可在磨削半导体带材时实时测量半导体带材的厚度,从而更精确地控制半导体带材的厚度。此外,磨石清洁单元可在进行半导体带材磨削步骤的同时进行磨石的清洁步骤,从而极大地减少了半导体带材磨削工艺所需的时间。结果,可极大地提高半导体带材磨削装置的生产率。
18.本公开的上述概述并不旨在描述本公开的每个所示实施例或每个实施方式。下面的详细描述和权利要求更具体地举例说明了这些实施例。
附图说明
19.从以下结合附图的描述中可更详细地理解实施例,其中:
20.图1是根据本发明实施例的半导体带材磨削装置的示意性平面图;
21.图2是图1所示的磨削单元与第一水平驱动部的示意性侧视图;
22.图3是图1所示的磨削单元与第一水平驱动部的示意性主视图;
23.图4是图2所示的砂轮和磨石的示意性仰视图;
24.图5是图1所示的修整单元与第二水平驱动部的示意性侧视图;和
25.图6和图7是图1所示的真空台和带材输送单元的示意性主视图。
26.虽然可对各种实施例做出各种修改和替代形式,但其细节已在附图中以示例的方式示出并将详细描述。然而,应理解,本发明并不旨在将要求保护的发明限制于所描述的特定实施例。相反,旨在涵盖落入本发明由权利要求限定的实质和范围内的所有修改、等同物和替代物。
具体实施方式
27.在下文中,将参考附图更详细地描述本发明的实施例。然而,本发明不限于以下描述的实施例并且可以各种其他形式实施。提供以下实施例并不是为了全面地完成本发明,而是为了向本领域技术人员充分表达本发明的范围而提供。
28.在本说明书中,当提及一个组件在另一个组件或层之上或连接至另一个组件或层时,它可直接在另一个组件或层之上或直接连接至另一个组件或层,或者也可存在居间的组件或层。与此不同,应理解,当提及一个组件直接位于另一个组件或层之上或直接连接至
另一个组件或层时,这意味着不存在中间组件。此外,尽管在本发明的各个实施例中使用诸如第一、第二和第三的术语来描述各个区域和层,但区域和层并不限于这些术语。
29.下面使用的术语仅用于描述具体实施例,并不限制本发明。此外,除非本文另有定义,包括技术或科学术语在内的所有术语可具有与本领域技术人员通常理解相同的含义。
30.参考理想实施例的示意图来描述本发明的实施例。因此,可从附图的形式预期制造方法和/或允许误差的变化。因此,本发明实施例的描述并不局限于图中的具体形式或区域,还包括形式上的偏差。这些区域可完全是示意性的,并且它们的形式可能不描述或描绘任何给定区域中的准确形式或结构,并且并不旨在限制本发明的范围。
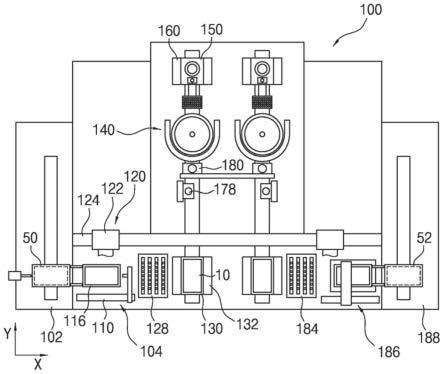
31.图1是根据本公开实施例的半导体带材磨削装置的示意性平面图。
32.参照图1,根据本公开实施例,半导体带材磨削装置100可用于磨削和去除半导体带材10的表面部分,从而将半导体带材10的厚度减小到预定厚度。具体地,半导体带材10可通过将半导体裸芯结合在诸如印刷电路板或引线框架的基板上,然后使用诸如环氧树脂的模塑树脂在基板上形成保护模塑层来制造。半导体带材磨削装置100可用于磨削和去除半导体带材10的保护模塑层的表面部分,使得半导体带材10具有预定厚度。
33.半导体带材磨削装置100可包括用于支撑半导体带材10的卡盘台130,以及用于磨削和去除装载在卡盘台130上的半导体带材10的表面部分的磨削单元140。如图1所示,例如,半导体带材磨削装置100可包括两个卡盘台130和两个磨削单元140。然而,卡盘台130和磨削单元140的数量可改变,因此本发明的范围将不受此限制。
34.图2是图1所示的磨削单元与第一水平驱动部的示意性侧视图,图3是图1所示的磨削单元与第一水平驱动部的示意性主视图,图4是图2所示的砂轮和磨石的示意性仰视图。
35.参照图2至图4,磨削单元140可包括用于磨削半导体带材10的表面部分的多个磨石142、其上安装磨石142的砂轮144、以及用于使砂轮144旋转的旋转驱动部146。特别地,磨石142可安装在砂轮144的下表面上,并且可沿着砂轮144的下边缘部分在圆周方向上布置。
36.根据本公开实施例,半导体带材磨削装置100可包括用于使卡盘台130沿水平方向移动的第一水平驱动部132,例如沿y轴方向,如图2所示。第一水平驱动部132可在设置于磨削单元140下方的处理区域(在该区域中执行半导体带材10的磨削步骤)和在水平方向上与处理区域间隔开的装卸载区域(在该区域中装载和卸载半导体带材10)之间水平移动卡盘台130。此外,第一水平驱动部132可使卡盘台130在处理区域中沿水平方向往复运动,以磨削半导体带材10的表面部分。
37.尽管图中未示出,半导体带材磨削装置100可包括用于使磨削单元140沿垂直方向移动的垂直驱动部(未示出)。垂直驱动部可通过调整磨削单元140的高度来调整半导体带材10的磨削厚度。或者,半导体带材磨削装置100可包括用于垂直地移动卡盘台130以调整半导体带材10的高度的第二垂直驱动部(未示出)。
38.第一水平驱动部132可包括配置为可沿导轨134移动的第一可移动块136,导轨134沿y轴方向延伸,卡盘台130可设置在第一可移动块136上。在这种情况下,虽然图中未示出,但卡盘台130可具有多个真空孔以真空吸附半导体带材10的下表面。
39.再次参照图1,根据本公开实施例,半导体带材磨削装置100可包括在将半导体带材10装载到卡盘台130上或从卡盘台130上卸载半导体带材10时对磨削单元140执行修整步骤的修整单元150。修整单元150可用于在执行磨削步骤时去除积聚在磨石142上的杂质并
改善磨石142的表面状况。
40.图5是图1所示修整单元与第二水平驱动部的示意性侧视图。
41.参照图5,半导体带材磨削装置100可包括用于水平地移动修整单元150的第二水平驱动部160,以便在执行半导体带材10的装卸载步骤时如上所述执行修整步骤,即,在卡盘台130与磨削单元140间隔开时执行修整步骤。
42.例如,第二水平驱动部160可在处理区域和与处理区域隔开的备用区域之间水平地移动修整单元150。具体地,第二水平驱动部160可使修整单元150沿y轴方向移动。也就是说,第一水平驱动部132和第二水平驱动部160可分别配置为同轴地移动卡盘台130和修整单元150。例如,第二水平驱动部160可包括配置为可沿导轨134移动的第二可移动块162,导轨134沿y轴方向延伸,修整单元150可设置在第二可移动块162上。
43.修整单元150可通过第二水平驱动部160移动以定位于磨削单元140下方,修整单元150可包括设置在磨削单元140下方以对应于砂轮144下表面的边缘部分的修整轮152,和用于使修整轮152旋转的第二旋转驱动部156。在这种情况下,垂直驱动部可降低磨削单元140,使得至少一个磨石142与修整轮152形成接触。可选地,半导体带材磨削装置100可包括用于调整修整轮152的高度的第三垂直驱动部(未示出)。
44.如上所述,在至少一个磨石142与修整轮152接触的状态下,旋转驱动部146可使砂轮144以预定速度旋转,并且第二旋转驱动部156可使修整轮152以预定速度旋转。通过修整轮152的旋转以及砂轮144的旋转可改善磨石142的表面状况。
45.同时,虽然图中未示出,但是磨削单元140可配置为在执行磨削步骤和修整步骤时供应冷却水以冷却磨石142和去除杂质。例如,冷却水可通过旋转驱动部146和砂轮144向磨石142供应。
46.再次参照图3,可将信息标签148,例如记录有砂轮144的id信息的rfid(射频识别)标签附接至砂轮144,并且用于读取砂轮144记录在信息标签148中的id信息的读取器166可安装在旋转驱动部146上。在将半导体带材10装载到卡盘台130上之后,读取器166可检查安装在旋转驱动部146上的砂轮144是否适于磨削装载的半导体带材10。因此,可防止由不合适的砂轮执行半导体带材10的磨削步骤的错误。特别地,砂轮144可拆卸地安装在旋转驱动部146上。因此,当不合适的砂轮安装在旋转驱动部146上时,可用新的合适的砂轮更换。
47.再次参照图2,根据本公开实施例,半导体带材磨削装置100可包括用于清洁半导体带材10的带材清洁单元170。带材清洁单元170可在执行半导体带材10的磨削步骤时和/或之后将清洁液喷射到半导体带材10上以去除半导体带材10上的杂质。例如,可使用水作为清洗液,通过以预定压力喷射水可从半导体带材10上充分地去除杂质。
48.进一步地,如图3所示,磨石清洁单元174可设置在磨石单元140下方以清洁磨石142。磨石清洁单元174可向磨石142喷射清洁液以去除磨石142中的杂质。例如,可使用水作为清洗液,通过以预定压力喷射水可从磨石142中充分地去除杂质。
49.特别地,半导体带材10可具有矩形板形状,其具有长度和宽度,并且卡盘台130可具有对应于半导体带材10的矩形块形状。此外,卡盘台130可设置在y轴方向上,并且第一水平驱动部132可使卡盘台130和半导体带材10沿卡盘台130和半导体带材10的纵向方向,即沿y轴方向移动。磨石清洁单元174可设置在卡盘台130运动路径的一侧,以将清洁液喷向磨石142。具体地,磨石清洁单元174可在执行半导体带材10的磨削步骤时将清洁液喷向磨石
142。此外,磨石清洁单元174可在执行磨石142的修整步骤时将清洁液喷向磨石142。
50.根据本公开实施例,如图2所示,半导体带材磨削装置100可包括用于在对半导体带材10执行磨削步骤时测量半导体带材10的厚度的厚度测量单元178。具有与半导体带材10的上表面接触的测量头的接触式传感器可用作厚度测量单元178。例如,可从位于意大利本蒂沃利奥的marposs购得的用于磨削机的通用测量仪unimar tm
可用作厚度测量单元178。厚度测量单元178可设置在磨削单元140沿y轴方向的一侧,以接触方式测量半导体带材10的厚度。如上所述,在执行半导体带材10的磨削步骤时通过厚度测量单元178可实时测量半导体带材10的厚度,因此可更精确地进行半导体带材10的厚度控制。
51.具体地,在对半导体带材10执行粗磨步骤或半精加工步骤时,厚度测量单元178可实时测量半导体带材10的厚度。然而,在对半导体带材10执行精加工步骤时,测量头可能与半导体带材10隔开。具体地,当测量头在对半导体带材10进行精加工步骤时与半导体带材10接触时,在精加工步骤完成后,可能在半导体带材10的上表面产生测量头的接触痕迹。因此,优选地在对半导体带材10执行精加工步骤时将测量头与半导体带材10分开。
52.同时,诸如激光测距传感器的非接触式传感器可用作厚度测量单元178。然而,在这种情况下,测量精度可能由于供应到半导体带材10上的磨削液和半导体带材10的磨削步骤中产生的杂质而劣化。
53.此外,半导体带材磨削装置100可包括如图5所示用于清洁厚度测量单元178的测量头的刷子154。刷子154可用于去除测量头上的杂质,并可配置为可通过第二水平驱动部160来移动。例如,刷子154可连接到第二可移动块162或第二旋转驱动部156,第二水平驱动部160可使刷子154沿y轴方向往复运动以从测量头去除杂质。
54.再次参照图1,半导体带材磨削装置100还可包括用于在半导体带材10的磨削步骤执行之后测量半导体带材10的厚度的第二厚度测量单元180。例如,第二厚度测量单元180可设置在磨削单元140和厚度测量单元178之间,并可在半导体带材10的磨削步骤完成后测量半导体带材10的厚度。
55.例如,虽然未详细示出,但是第二厚度测量单元180可包括配置为可垂直移动以与半导体带材10的上表面接触的探针,并可通过在探针与半导体带材10的上表面接触的状态下测量探针的高度来计算半导体带材10的厚度。作为另一示例,诸如激光测距传感器的非接触型传感器可用作第二厚度测量单元180。
56.同时,虽然未在图中示出,但是第二厚度测量单元180可配置为可沿水平方向移动,例如沿x轴方向,以便在半导体带材10的多个测量点测量半导体带材10的厚度。例如,半导体带材磨削装置100还可包括用于使第二厚度测量单元180沿x轴方向移动的第三水平驱动部(未示出)。
57.此外,第二厚度测量单元180可在执行半导体带材10的磨削步骤之前测量半导体带材10的初始厚度,并可基于测量的初始厚度来预先确定半导体带材10的磨削厚度。例如,虽然图中未示出,但半导体带材磨削装置100可包括控制单元(未示出),用于控制磨削单元140、修整单元150、第一水平驱动部132和第二水平驱动部160、垂直驱动部等的操作,并且控制单元可基于测量的初始厚度预先确定半导体带材10的磨削厚度。
58.根据本公开实施例,半导体带材磨削装置100可包括用于供应半导体带材10的装载单元102,以及用于在执行磨削工艺之后卸载半导体带材10的卸载单元188。例如,配置为
接收多个半导体带材的第一料仓50可设置在装载单元102上,在完成磨削过程之后用于接收半导体带材10的第二料仓52可设置在卸载单元188上。此外,半导体带材磨削装置100可包括配置为从第一料仓50中抽出半导体带材10的带材抽出单元104,从第一料仓50抽出的半导体带材10放置其上、并配置为真空吸附半导体带材10下表面的真空台116,和配置为拾取放置在真空台116上的半导体带材10并将半导体带材10输送到卡盘台130上的带材输送单元120。
59.图6和图7是如图1所示的真空台和带材输送单元的示意性主视图。
60.参照图6和图7,真空台116可配置为可通过台升降机118沿垂直方向移动。在由带材抽出单元104从第一料仓50中抽出的半导体带材10放置在真空台116上之后,真空台116可真空吸附半导体带材10的下表面。例如,真空台116可具有矩形板形状,并可具有用于真空吸附半导体带材10下表面的多个真空孔(未示出)。
61.带材抽出单元104可包括:用于推动容纳在第一料仓50中的半导体带材之一以便将其从第一料仓50中突出的推动器106,用于夹持从第一料仓50中伸出的半导体带材10的夹具108,用于使夹具108沿水平方向(例如沿x轴方向)移动以将半导体带材10输送到真空台116上的夹具驱动部110(参见图1),以及用于引导半导体带材10在第一料仓50和真空台116之间移动的输送轨112。
62.此外,虽然图中未示出,但第一料仓50可配置为可通过第一料仓驱动部(未示出)沿竖直方向移动,并且第一料仓驱动部可调节第一料仓50的高度以使待抽出的半导体带材10的高度与推动器106相对应。
63.带材输送单元120可包括:配置为真空吸附半导体带材10的上表面以拾取半导体带材10的真空拾取器122,以及配置为移动真空拾取器122的拾取器驱动部124。拾取器驱动部124可使真空拾取器122旋转以调整真空拾取器122的方向,并且可使真空拾取器122沿垂直方向和水平方向(x轴方向)移动。如图1所示,带材输送单元120可包括两个真空拾取器122。然而,由于真空拾取器122的数量可改变,本公开的范围将不受此限制。
64.根据本公开实施例,在将半导体带材10放置在真空台116上之后,可将半导体带材10的下表面真空吸附到真空台116的上表面。因此,当半导体带材10发生翘曲时,半导体带材10可在真空台116上平整化,从而可容易地由真空拾取器122对半导体带材10进行拾取。
65.特别地,如图7所示,台升降机118可在半导体带材10真空吸附在真空台116上之后升高真空台116,并且拾取器驱动部124可降低真空拾取器122使得真空拾取器122的下表面与半导体带材10的上表面紧密接触。结果,半导体带材10的下表面和上表面可在真空台116和真空拾取器122之间紧密接触,然后半导体带材10可从真空台116转移到真空拾取器122。因此,即使半导体带材10的下表面由于半导体带材相对较大程度的翘曲而没有充分真空吸附在真空台116上,半导体带材10也可紧密接触在真空台116和真空拾取器122之间,因此,半导体带材10可以足够平坦的状态传送到真空拾取器122。
66.此外,拾取器驱动部124可移动真空拾取器122,使得半导体带材10与卡盘台130紧密接触,于是半导体带材10可真空吸附在卡盘台130上。结果,即使在供应的半导体带材10具有翘曲时,半导体带材10也可以足够平坦的状态供应到卡盘台130上,因此可更均匀地执行半导体带材10的磨削工艺。
67.再次参照图1,用于清洁由真空拾取器122拾取的半导体带材10下表面的第一下部
清洁单元128可设置在真空台116和卡盘台130之间。第一下部清洁单元128可喷射清洁液和/或清洁气体到半导体带材10的下表面上,因此,在半导体带材10被装载到卡盘台130上之前,可从半导体带材10的下表面充分去除杂质。例如,水和空气可分别用作清洗液和清洗气体。
68.在磨削单元140执行磨削步骤之后,半导体带材10可由真空拾取器122拾取,然后输送到干燥单元186。在这种情况下,用于从半导体带材10的下表面去除杂质的第二下部清洁单元184可设置在卡盘台130和干燥单元186之间。第二下部清洁单元184可将清洁液和/或清洁气体喷射到半导体带材10的下表面上以从其上去除杂质。此外,第二下部清洁单元184可将干燥气体喷射到半导体带材10的下表面以使其干燥。例如,水可用作清洗液,空气可用作清洗气体和干燥气体。
69.干燥单元186可将干燥气体(例如空气)喷射到半导体带材10的上表面上。虽然图中未示出,但是在干燥单元186上干燥的半导体带材10可通过带材接收单元(未示出)接收在第二料仓52中。
70.根据如上所述的本公开实施例,修整单元150对磨削单元140的修整步骤可在将半导体带材10装载到卡盘台130上或从卡盘台130卸载半导体带材10的同时执行。因此,不需要额外的时间来对磨削单元140执行修整步骤,因此可极大地增加半导体带材磨削装置100的每小时吞吐量。此外,厚度测量单元178可在磨削半导体带材10的同时实时测量半导体带材10的厚度,从而更精确地控制半导体带材10的厚度。此外,磨石清洁单元174可在进行半导体带材10的磨削步骤的同时执行磨石142的清洁步骤,从而极大地减少了半导体带材10的磨削工艺所需的时间。结果,半导体带材磨削装置100的生产率可极大地改善。
71.尽管已经参照特定实施例描述了本公开的示例实施例,但是它们并不限于此。因此,本领域技术人员将容易理解,在不背离本公开由所附权利要求限定的实质和范围的情况下,可对其进行各种修改和改变。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。