1.本公开涉及针对每个车辆而从多个路径候补之中选择使能够进行自主行驶且成为由操作者进行的远程支援的对象的车辆行驶的路径的路径选择装置、路径选择方法以及路径选择程序。
背景技术:
2.自动驾驶车辆基本上会自主地继续进行自动行驶。但是,有时自动驾驶车辆的自主判断是不可靠的、或者需要更可靠的安全判断。因此,研究了:不是一切都交给自动驾驶车辆的自主判断,而是远程监视自动驾驶车辆,在必要的情况下,操作者将判断、远程行驶指示传递给车辆,从而支援自动驾驶车辆的自动行驶。与自动驾驶车辆的远程监视有关的现有技术之一在下述的专利文献1中被公开。
3.在专利文献1所公开的现有技术中,关于各路径候补,针对每个区间而计算驾驶成本,选择全区间的驾驶成本的总和成为最小的路径候补。各区间的驾驶成本是对各区间的行驶时间乘以加权系数而计算的。针对驾驶成本的加权系数是根据驾驶模式决定的。例如,针对远程操纵模式下的驾驶成本的加权系数比针对自动驾驶模式下的驾驶成本的加权系数大。另外,在现有技术中,也可以操作者工作率越高,则将针对远程操纵模式下的驾驶成本的加权系数设定为越大的值。
4.上述现有技术针对每个自动驾驶车辆而选择其最佳路径。但是,在各个自动驾驶车辆独自选择最佳路径的情况下,车辆会集中于1个路径,会招致操作者的负荷的增大以及同一路径的拥堵。
5.此外,作为示出与本公开关联的技术领域的技术水准的文献,除了上述专利文献1之外,还能够例示专利文献2以及专利文献3。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2019-190835号公报
9.专利文献2:日本特开2019-185279号公报
10.专利文献3;日本特开2019-160146号公报
技术实现要素:
11.本公开是鉴于如上所述的问题而完成的,其目的在于提供维持能够进行自主行驶且成为由操作者进行的远程支援的对象的多个车辆的顺畅的运行并有助于抑制操作者的人工费的技术。
12.本公开提供用于达到上述目的的路径选择装置。本公开的路径选择装置是在通过多个操作者远程监视能够进行自主行驶的多台车辆的远程监视系统中,针对每个车辆而从多个路径候补之中选择使各车辆行驶的路径的装置。远程监视系统是响应于来自上述多台
车辆中的任意一台车辆的支援请求而使上述多个操作者中的任意一个操作者进行远程支援的系统。
13.本路径选择装置包括:至少1个存储器,包括至少1个程序;以及至少1个处理器,与该至少1个存储器结合。上述至少1个程序构成为使上述至少1个处理器执行以下的处理。
14.在第1处理中,根据当前选择的各车辆的路径和各车辆的运行状况,针对每个车辆而预测远程支援的产生。
15.在第2处理中,根据上述多台车辆中的远程支援的产生的预测结果来预测作为上述多个操作者的整体的工作率。
16.第3处理是响应于预测出的操作者工作率比目标范围高而执行的处理。在第3处理中,将上述多台车辆的路径的组合变更为使作为上述多个操作者的整体的支援成本与当前选择的组合相比较更加降低的组合。
17.第4处理是响应于预测出的操作者工作率比目标范围低而执行的处理。在第4处理中,将上述多台车辆的路径的组合变更为使作为上述多台车辆的整体的车辆成本与当前选择的组合相比较更加降低的组合。
18.根据本路径选择装置,在预测出的操作者工作率比目标范围高的情况下,选择使支援成本降低的路径,从而能够使操作者工作率自然地下降至目标范围。另一方面,在预测出的操作者工作率比目标范围低的情况下,进行远程支援的富余度大,所以通过选择使车辆成本降低的路径,能够使车辆的运行变顺畅。也就是说,根据本路径选择装置,考虑车辆成本和支援成本来选择路径,以使操作者工作率保持在目标范围,从而能够使车辆顺畅地运行和抑制操作者的人工费。
19.在上述第3处理中,也可以按照支援成本的降低效果从高到低的顺序抽取预定数量的上述多台车辆的路径的组合,从该预定数量的组合之中选择使支援成本降低的组合。据此,通过从按照支援成本的降低效果从高到低的顺序抽取出的预定数量的组合之中选择变更后的组合,从而能够确保多台车辆的路径的组合的变更所致的支援成本的降低。
20.进而,在上述第3处理中,也可以预测出的操作者工作率越比目标范围高,则选择支援成本的降低效果越高的组合。通过进行这样的选择,从而能够提高使操作者工作率下降至目标范围的可靠性。
21.在上述第4处理中,也可以按照车辆成本的降低效果从高到低的顺序抽取预定数量上述多台车辆的路径的组合,从该预定数量的组合之中选择使车辆成本降低的组合。据此,通过从按照车辆成本的降低效果从高到低的顺序抽取出的预定数量的组合之中选择变更后的组合,从而能够确保多台车辆的路径的组合的变更所致的车辆成本的降低。
22.进而,在上述第4处理中,也可以预测出的操作者工作率越比目标范围低,则选择车辆成本的降低效果越高的组合。通过进行这样的选择,能够更有效活用进行远程支援的富余度,使车辆的运行变得更加顺畅。
23.另外,本公开提供用于达到上述目的的路径选择方法。本公开的路径选择方法应用于由多个操作者远程监视能够进行自主行驶的多台车辆、响应于来自这些多台车辆中的任意一台车辆的支援请求而使上述多个操作者中的任意一个操作者进行远程支援的系统中。本路径选择方法是在这样的系统中,针对每个车辆而从多个路径候补之中选择使各车辆行驶的路径的方法。本路径选择方法包括以下的步骤。
24.在第1步骤中,根据当前选择的各车辆的路径和各车辆的运行状况,针对每个车辆而预测远程支援的产生。
25.在第2步骤中,根据上述多台车辆中的远程支援的产生的预测结果来预测作为上述多个操作者的整体的工作率。
26.第3步骤是在预测出的操作者工作率比目标范围高的情况下执行的步骤。在第3步骤中,将上述多台车辆的路径的组合变更为使作为上述多个操作者的整体的支援成本与当前选择的组合相比较更加降低的组合。
27.第4步骤是在预测出的操作者工作率比目标范围低的情况下执行的步骤。在第4步骤中,将上述多台车辆的路径的组合变更为使作为上述多台车辆的整体的车辆成本与当前选择的组合相比较更加降低的组合。
28.进而,本公开提供用于达到上述目的的路径选择程序。本公开的路径选择程序也可以记录于计算机可读取的记录介质中。本公开的路径选择程序是在通过多个操作者远程监视能够进行自主行驶的多台车辆的远程监视系统中,使计算机执行针对每个车辆而从多个路径候补之中选择使各车辆行驶的路径的程序。远程监视系统是响应于来自上述多台车辆中的任意一台车辆的支援请求而使上述多个操作者中的任意一个操作者进行远程支援的系统。本路径选择程序构成为使计算机执行以下的处理。
29.在第1处理中,根据当前选择的各车辆的路径和各车辆的运行状况,针对每个车辆而预测远程支援的产生。
30.在第2处理中,根据上述多台车辆中的远程支援的产生的预测结果来预测作为上述多个操作者的整体的工作率。
31.第3处理是响应于预测出的操作者工作率比目标范围高而执行的处理。在第3处理中,将上述多台车辆的路径的组合变更为使作为上述多个操作者的整体的支援成本与当前选择的组合相比较更加降低的组合。
32.第4处理是响应于预测出的操作者工作率比目标范围低而执行的处理。在第4处理中,将上述多台车辆的路径的组合变更为使作为上述多台车辆的整体的车辆成本与当前选择的组合相比较更加降低的组合。
33.根据上述本路径选择方法以及本路径选择程序,在预测出的操作者工作率比目标范围高的情况下,选择使支援成本降低的路径,从而能够使操作者的工作率自然地下降至目标范围。另一方面,在预测出的操作者工作率比目标范围低的情况下,进行远程支援的富余度大,所以通过选择使车辆成本降低的路径,能够使车辆的运行变顺畅。也就是说,根据本路径选择方法以及本路径选择程序,考虑车辆成本和支援成本来选择路径,以使操作者工作率保持在目标范围,从而能够使车辆顺畅地运行和抑制操作者的人工费。
34.如上所述,根据本公开的路径选择装置、路径选择方法以及路径选择程序,能够维持能够进行自主行驶且成为由操作者进行的远程支援的对象的多个车辆的顺畅的运行,并有助于抑制操作者的人工费。
附图说明
35.图1是应用本公开的实施方式的路径选择装置的远程监视系统的整体图。
36.图2是说明自动驾驶车辆的路径的图。
37.图3是示出本公开的实施方式的路径选择装置的结构的一个例子的框图。
38.图4是说明操作者工作率的预测值比目标范围高的情况下的路径候补的抽取的图。
39.图5是说明操作者工作率的预测值比目标范围低的情况下的路径候补的抽取的图。
40.图6是示出与操作者工作率的预测值相应的路径的组合的选择的图。
41.图7是示出由本公开的实施方式的路径选择装置进行的路径的组合的选择的次序的流程图。
42.符号说明
43.10:通信网络;20:自动驾驶车辆;34:操作终端;36:操作者;40:服务器(路径选择装置);41:处理器;42:存储器;43:程序;44:路径候补抽取部;45:路径选择部;100:远程监视系统。
具体实施方式
44.以下,参照附图说明本公开的实施方式。但是,在以下所示的实施方式中,除了提及各要素的个数、数量、量、范围等数的情况、特别明示的情况、在原理上明显被确定为该数量的情况之外,本公开的技术思想并不限定于该提及的数量。另外,在以下所示的实施方式中说明的构造等除了特别明示的情况、明显在原理上被确定为该构造的情况之外,对于本公开的技术思想而言不是必需的。
45.图1是远程监视自动驾驶车辆的远程监视系统的结构图。远程监视系统100是通过多个操作者36远程监视自主行驶的多台自动驾驶车辆20的系统。但是,并不是所有的自动驾驶车辆20始终被操作者36监视。在远程监视系统100中,在从作为监视对象的自动驾驶车辆20有远程支援的请求的情况下,分派空闲的操作者36中的任意一个操作者,使该分派的操作者36进行远程支援。作为在远程监视系统中成为远程监视的对象的自动驾驶车辆20的自动驾驶等级,例如设想在sae(society of automotive engineers,汽车工程师学会)的定义中的等级3以上。以下,将自动驾驶车辆20简称为车辆20。
46.在由远程监视系统100进行的远程支援中,用于由车辆20进行的自动驾驶的判断中的至少一部分由操作者36进行。在假设没有由操作者36进行的远程支援的情况下,车辆20的自主行驶时的判断不得不变得保守。因此,由于在行驶过程中停止或降低速度而有可能会发生对周围的交通流量造成影响的事态。但是,在远程监视系统100中,在紧急情况下可从操作者36获得远程支援,所以车辆20能够进行在直至目的地为止的最短路径中行进等积极的自主行驶。
47.在车辆20进行积极的自主行驶的情况下,作为预计需要由操作者36进行的车辆20的远程支援的主要原因,例如能够举出以下例子。
48.·
红绿灯的误识别/未检测(逆光、卡车等所致的遮挡、无v2x的红绿灯)
49.·
前车辆的识别不稳定(难以由lidar检测的远距离的黑车、摩托车)
50.·
横穿人行道时的人行道上的行人、自行车
51.·
路边停车多的道路上的变道、行驶车道变更
52.·
停车位置的修正(向路边停车及拥堵的应对、障碍物的产生)
53.·
确认车辆出发时的周围
54.·
道路施工、交通管制出发时的车道变更
55.在远程支援中,与驾驶所需的认知、判断以及操作有关的基本的计算在车辆20中进行。操作者36根据从车辆20发送的信息,判断车辆20应采取的行动,对车辆20进行指示。作为从车辆20发送的信息,例如包括由车载摄像机摄像到的车辆20的周边的图像信息、由车载麦克风收集到的车辆20的周边的声音信息、车辆20计算出的目标轨道等。作为从操作者36发送到车辆20的远程支援的指示,包括车辆20的前进的指示以及车辆20的停止的指示。另外,作为远程支援的指示,包括对于前方的障碍物偏移避开的指示、超前车辆的指示、紧急疏散的指示等。
56.远程监视系统100包括服务器40。操作者36操作的操作终端34连接于服务器40。另外,作为远程监视系统100的监视对象的车辆20经由包括4g、5g在内的通信网络10连接于服务器40。服务器40例如设置于监视中心或者云上。
57.服务器40是1个计算机或者利用通信网络连接的多个计算机的集合体。服务器40具备至少1个处理器41和与处理器41结合的至少1个存储器42。在存储器42中,存储有能够由处理器41执行的至少1个程序43和与其关联的各种信息。存储器42包括主存储装置和辅助存储装置。程序43既能够存储于主存储装置,也能够存储于辅助存储装置。在辅助存储装置中,存储有管理用于自动驾驶的地图信息的地图数据库。
58.通过由处理器41执行程序43,从而实现由处理器41进行的各种处理。作为程序43,包括响应于来自车辆20的远程支援的请求而决定对请求远程支援的车辆20分派哪个操作者36的程序。在决定分派的操作者36之后,操作者36的操作终端34与车辆20连接,开始用于远程支援的通信。
59.进而,作为程序43,包括使服务器40作为路径选择装置发挥功能的程序(路径选择程序)。从服务器40提供车辆20的直至目的地为止的路径。直至目的地为止的路径根据在地图数据库中管理的地图信息来制作。车辆20可能采用的直至目的地为止的路径存在多个。服务器40的作为路径选择装置的功能是针对每个车辆20而从多个路径候补之中选择使各车辆20行驶的路径的功能。
60.在此,使用图2说明由作为路径选择装置的服务器40进行的路径选择的概要。在此,设为从第1车辆至第n车辆的n台车辆是远程监视系统100的监视对象。服务器40针对每个车辆20而生成多个路径候补,根据车辆20的前进来更新路径候补。也就是说,服务器40按照预定的时间间隔或者每隔预定的行驶距离,生成多个从车辆20的当前位置至目的地为止的路径候补。例如,第1车辆的当前时间点下的路径候补是从第1路径至第4路径的4个路径。但是,其中的1个路径是当前的路径。在此,当选择了第4路径时,去掉从第1至第3的路径,根据预定时间后或者行驶预定距离后的第1车辆的位置来生成新的路径候补。
61.服务器40关于所生成的各路径候补,判定有无上面列举的预计需要远程支援的主要原因。在图2所示的例子中,在第1车辆的路径候补中的第1路径中包括道路施工的区间,在第2路径中包括无v2x的红绿灯。在道路施工的区间,为了判断引导人员的指示以及周围的状况,预测支援请求的产生。在无v2x的红绿灯的设置场所,为了判断红绿灯的点亮颜色以及周围的状况,预测支援请求的产生。因此,第1车辆的路径候补中的第1路径和第2路径被判定为是预测会产生远程支援的路径。这样,服务器40每当从多个路径候补之中选择路
径时,针对各车辆的每个路径候补而预测远程支援的产生。此外,作为难以产生远程支援的路径,例如可举出直路多的路径、不通过红绿灯、交叉路口的路径、无需超车的路径。
62.图3是示出作为路径选择装置的服务器40的结构的一个例子的框图。图3所示的路径候补抽取部44和路径选择部45是在存储于存储器42的程序43详细而言路径选择程序由处理器41执行时实现的作为路径选择装置的服务器40的功能。
63.路径候补抽取部44获取多个种类的信息,例如地图信息51、各车辆20的当前地点52、各车辆20的目的地53、路径信息54、道路状况信息55、v2x设置信息56以及通信环境数据57。路径信息54包括红绿灯信息、道路信息。道路状况信息55包括施工信息、与拥堵及停止车辆有关的信息。v2x设置信息56是面向自动驾驶的基础设施信息。通信环境数据57包含lte/4g/5g的基站信息。
64.路径候补抽取部44根据获取到的信息51~57针对每个车辆20而搜索路径候补。在路径候补的搜索中参照运行设计区域(odd),从路径候补中排除通过禁止行驶区域的路径。路径候补抽取部44针对每个搜索到的路径候补而预测远程支援的产生。关于预测会产生远程支援的路径,路径候补抽取部44计算远程支援的预测产生时刻。
65.路径候补抽取部44针对各车辆20的每个路径候补而计算支援成本。某个路径的支援成本意味着用于在该路径上预测会产生的远程支援的成本、详细而言与进行远程支援的操作者36的人工费关联的成本。支援成本例如用每个远程支援的预测支援时间的合计表示。由操作者36进行的支援次数越多,则支援成本越大,每一次支援的支援时间越长,则支援成本越大。
66.另外,路径候补抽取部44针对各车辆20的每个路径候补而计算车辆成本。某个路径的车辆成本意味着在该路径上行驶的情况下的车辆20的运营成本。车辆成本例如用以直至抵达目的地为止的所需时间、燃油效率、事故风险为参数的一次多项式表示。如果使直至抵达目的地为止的所需时间越长,则车辆成本越大,如果燃油效率越差,则车辆成本越大,如果事故风险越高,则车辆成本越大。换言之,通过选择车辆成本低的路径,从而能够使得提前抵达目的地,或者提高燃油效率。
67.路径候补抽取部44根据不同的两个观点,从车辆20间的路径候补的组合之中抽取预定数量的路径候补的组合。路径候补抽取部44抽取路径候补的组合的第1观点是支援成本。在第1观点中,按照作为远程监视系统100的整体而支援成本从低到高的顺序,抽取预定数量的路径候补的组合。路径候补抽取部44抽取路径候补的组合的第2观点是车辆成本。在第2观点中,按照作为远程监视系统100的整体而车辆成本从低到高的顺序,抽取预定数量的路径候补的组合。
68.路径候补抽取部44参照操作者工作率的预测值而决定依照两个观点中的哪个观点来抽取路径候补的组合。操作者工作率用针对总操作者数的工作的操作者数来定义。操作者工作率的预测值是在各车辆20维持当前选择的路径的情况下预测的操作者工作率。路径候补抽取部44根据当前选择的各车辆20的路径和各车辆20的运行状况,针对每个车辆20而预测远程支援的产生,根据每个车辆20的远程支援的产生的预测结果来预测操作者工作率。
69.能够在监视中心进行远程支援的操作者36的人数是确定的。因此,为了实现车辆20的顺利的运行,重要的是进行远程支援的操作者工作率。在工作率超过的情况下,难以进
行向远程支援的应对,所以在车辆20的运行中会产生延迟。另一方面,如果想要过度地降低操作者工作率,则无法选择能够使需要操作者36的远程支援的车辆20尽早抵达至目的地的路径。
70.在远程监视系统100中,在紧急情况时操作者36能够应对地具有富余度的工作率的范围被设定为目标范围。紧急情况时例如意味着车辆20遭遇事故的情况、将要招致事故的情况等与车辆20或者其周围的安全相关的主要原因所致的支援请求的产生时。在操作者工作率的预测值比目标范围高的情况下,选择作为远程监视系统100的整体而使支援成本下降的路径候补的组合,从而能够使操作者工作率下降。另一方面,在操作者工作率的预测值比目标范围低的情况下,能够无需担心操作者36的负荷而选择作为远程监视系统100的整体而使车辆成本下降的路径候补的组合。
71.路径选择部45从由路径候补抽取部44抽取出的路径候补的组合之中选择最佳路径61。最佳路径61是能够使处于远程监视系统100的监视下的车辆20作为整体最顺畅地运行的路径候补的组合。路径选择部45根据操作者工作率的预测值与其目标范围之差来决定最佳路径61。
72.以下,使用图4至图7详述作为路径选择装置的服务器40的动作也就是说路径候补抽取部44和路径选择部45。
73.图4是说明操作者工作率的预测值比目标范围高的情况下的路径候补的抽取的图。首先,路径候补抽取部44针对每个车辆而搜索能够选择的路径。此时,参照odd而从能够选择的路径中排除通过禁止行驶区域的路径。
74.在操作者工作率的预测值比目标范围高的情况下,路径候补抽取部44抽取使作为操作者36的整体的支援成本降低的路径的组合。具体而言,路径候补抽取部44首先关于各个车辆20,针对每个路径而单独地计算支援成本。将此时计算的支援成本称为单独支援成本。路径候补抽取部44针对在各路径上预测的每个远程支援而计算预测支援时间,针对每个路径而计算预测支援时间的合计。针对每个路径而计算出的预测支援时间的合计被用作每个路径的单独支援成本。
75.接下来,路径候补抽取部44计算车辆20间的远程支援的产生定时的重叠所致的支援成本。将此时计算的支援成本称为重复支援成本。根据车辆20间的路径的组合而在多个车辆20间远程支援的产生定时重叠或者不重叠。在远程支援的产生定时重叠的情况下,同时需要与其重复数相应的人数的操作者36。将同时支援的操作者数换算为时间成本而得到的值被用作重复支援成本。
76.通过对每个车辆20的单独支援成本的合计中加上重复支援成本,从而计算综合支援成本。路径候补抽取部44按照综合支援成本从低到高的顺序,即按照使作为操作者36的整体的支援成本降低的效果从高到低的顺序,抽取预定数量的路径候补的组合。在图4所示的例子中,按照综合支援成本从低到高的顺序,抽取出组合h1、h2以及h3。在图4所示的例子中,作为组合h1,对第1车辆选择第3路径,对第2车辆选择第2路径,
…
,而且,对第n车辆选择第4路径。该情况下的组合h1的综合支援成本按照“综合支援成本=第1车辆的第3路径的单独支援成本 第2车辆的第2路径的单独支援成本
…
第n车辆的第4路径的支援成本 重复支援成本”来计算。
77.图5是说明操作者工作率的预测值比目标范围低的情况下的路径候补的抽取的
图。首先,路径候补抽取部44针对每个车辆而搜索能够选择的路径。此时参照odd而从能够选择的路径中排除通过禁止行驶区域的路径。
78.在操作者工作率的预测值比目标范围低的情况下,路径候补抽取部44抽取使作为车辆20的整体的车辆成本降低的路径的组合。具体而言,路径候补抽取部44首先关于各个车辆20,针对每个路径而单独地计算车辆成本。将此时计算的车辆成本称为单独车辆成本。
79.通过对每个车辆20的单独车辆成本进行合计,从而计算综合车辆成本。路径候补抽取部44按照综合车辆成本从低到高的顺序,即按照使车辆成本降低的效果从高到低的顺序,抽取预定数量的路径候补的组合。在图5所示的例子中,按照综合车辆成本从低到高的顺序,抽取出组合l1、l2以及l3。在图5所示的例子中,作为组合l1,对第1车辆选择第5路径,对第2车辆选择第5路径,
…
,而且,对第n车辆选择第1路径。该情况下的组合l1的综合车辆成本按照“综合车辆成本=第1车辆的第5路径的单独车辆成本 第2车辆的第5路径的单独车辆成本
…
第n车辆的第1路径的车辆成本”来计算。
80.如以上那样,路径候补抽取部44在操作者工作率的预测值比目标范围高的情况下,抽取路径的组合h1、h2以及h3,在操作者工作率的预测值比目标范围低的情况下,抽取路径的组合l1、l2以及l3。路径选择部45从由路径候补抽取部44抽取出的路径的组合之中选择与操作者工作率的预测值相应的组合。
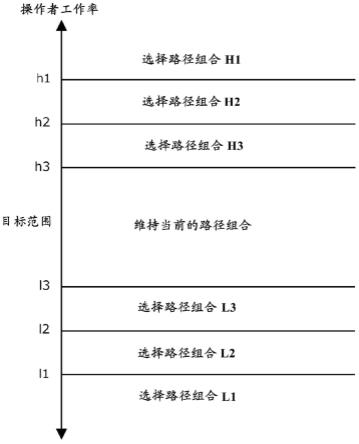
81.图6是示出由路径选择部45进行的与操作者工作率的预测值相应的路径的组合的选择的图。在图6所示的例子中,操作者工作率的目标范围是从上限h3至下限l3为止的范围。在操作者工作率的预测值处于目标范围内的情况下,路径选择部45维持当前的路径组合。
82.对操作者工作率设定了比目标范围的上限h3高的阈值h2和比阈值h2更高的阈值h1。在操作者工作率的预测值比阈值h1大的情况下,选择支援成本的降低效果最高的路径组合h1。在操作者工作率的预测值为阈值h1以下且比阈值h2大的情况下,选择支援成本的降低效果第二高的组合h2。然后,在操作者工作率的预测值为阈值h2以下且比目标范围的上限h3大的情况下,选择支援成本的降低效果第三高的路径组合h3。这样,根据操作者工作率的预测值与目标范围的上限h3之差来变更路径组合,从而能够防止操作者工作率的下降超出预期。
83.另外,对操作者工作率设定了比目标范围的下限l3低的阈值l2和比阈值l2更低的阈值l1。在操作者工作率的预测值比阈值l1小的情况下,选择车辆成本的降低效果最高的路径组合l1。在操作者工作率的预测值为阈值l1以上且比阈值l2小的情况下,选择车辆成本的降低效果第二高的组合l2。然后,在操作者工作率的预测值为阈值l2以上且比目标范围的下限l3小的情况下,选择车辆成本的降低效果第三高的路径组合l3。这样,根据操作者工作率的预测值与目标范围的下限l3之差来变更路径组合,从而能够防止操作者工作率的增大超出预期。
84.图7是示出由作为路径选择装置的服务器40进行的路径的组合的选择的次序的流程图。该流程图示出了本公开的实施方式的路径选择方法。在流程图的步骤s101中,关于所有的车辆20而预测有无维持当前的路径的情况下的远程支援的产生。在步骤s102中,根据步骤s101中的预测结果来计算操作者工作率的预测值。
85.接着步骤s102之后执行步骤s103。在步骤s103中,对操作者工作率的预测值与阈
值h1进行比较。在预测值比阈值h1大的情况下,在步骤s109中选择路径组合h1。
86.在预测值为阈值h1以下的情况下,执行步骤s104。在步骤s104中,对操作者工作率的预测值与阈值h2进行比较。在预测值比阈值h2大的情况下,在步骤s110中选择路径组合h2。
87.在预测值为阈值h2以下的情况下,执行步骤s105。在步骤s105中,对操作者工作率的预测值与目标范围的上限h3进行比较。在预测值比目标范围的上限h3大的情况下,在步骤s111中选择路径组合h3。
88.在预测值为目标范围的上限h3以下的情况下,执行步骤s106。在步骤s106中,对操作者工作率的预测值与阈值l1进行比较。在预测值比阈值l1小的情况下,在步骤s112中选择路径组合l1。
89.在预测值为阈值l1以上的情况下,执行步骤s107。在步骤s107中,对操作者工作率的预测值与阈值l2进行比较。在预测值比阈值l2小的情况下,在步骤s113中选择路径组合l2。
90.在预测值为阈值l2以上的情况下,执行步骤s108。在步骤s108中,对操作者工作率的预测值与目标范围的下限l3进行比较。在预测值比目标范围的下限l3小的情况下,在步骤s114中选择路径组合l3。
91.在预测值为目标范围的下限l3以上的情况下,执行步骤s115。在步骤s115中,维持当前的路径组合。
92.从以上的说明可清楚知道,根据本实施方式,在操作者工作率的预测值比目标范围高的情况下,选择使支援成本降低的路径,从而能够使操作者工作率自然地下降至目标范围。另一方面,在操作者工作率的预测值比目标范围低的情况下,进行远程支援的富余度大,所以通过选择使车辆成本降低的路径,从而能够使车辆20的运行顺畅。也就是说,根据本实施方式,考虑车辆成本和支援成本来选择路径,以使操作者工作率保持在目标范围,从而能够维持车辆20的顺畅的运行,并抑制操作者36的人工费。
93.此外,作为本实施方式的变形例,也可以如果操作者工作率的预测值比目标范围高,则选择支援成本的降低效果最高的路径组合h1,如果操作者工作率的预测值比目标范围低,则选择车辆成本的降低效果最高的路径组合l1。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。