1.本公开涉及一种向用户通知本车辆正在接近前方车辆的通知装置、通知系统及记录介质。
背景技术:
2.已知在本车辆在前方车辆的附近的情况下,会向用户输出警报(例如,参照专利文献1)。在专利文献1中,记载了:用从前方车辆到本车辆的车间距离、或本车辆相对于前方车辆的相对车速来确定是否输出警报。
3.先行技术文献
4.专利文献
5.专利文献1:日本国特开2004-67085号公报
技术实现要素:
6.发明要解决的技术问题
7.在专利文献1所记载的发明中,存在以下这样的问题:无法识别出车间距离因打盹等驾驶员的异常而变短的情况、以及在本车辆正在前方车辆的后方追赶的状态下驾驶员要维持比较短的车间距离的情况。因此,在专利文献1所记载的发明中,有时,尽管没有本车辆与前方车辆接触的危险性,但警报会被误输出。
8.因此,本公开鉴于这些点而完成,其目的在于提供一种能够抑制警报被误输出的通知装置。
9.用于解决技术问题的技术手段
10.本公开的第1方案的通知装置包括:确定部,其对本车辆的速度相对于前方车辆的速度即相对车速、以及从该本车辆到该前方车辆的车间距离进行确定;以及通知部,其以所述车间距离为判定阈值以下,且在所述车间距离成为该判定阈值以下之前的预定期间中,所述相对车速为预定值以上的状态持续为条件,向用户通知所述本车辆正在接近所述前方车辆。
11.也可以是,在所述车间距离成为所述判定阈值以下之前的预定期间中,所述相对车速为预定值以上的状态未持续的情况下,在所述车间距离成为比所述判定阈值更短的最小阈值以下之前,所述通知部不向用户通知所述本车辆正在接近所述前方车辆。
12.也可以是,在所述相对车速的每单位时间的増加为基准值以上的情况下,所述通知部以所述车间距离成为比所述判定阈值更长的预备阈值以下为条件,向用户通知所述本车辆正在接近所述前方车辆。也可以是,所述通知装置还包括算出部,该算出部通过将所述本车辆以基准速度行驶的情况下的所述判定阈值即基准阈值乘以基于所述本车辆的速度的系数,从而算出所述判定阈值。
13.也可以是,即使在所述车间距离为所述判定阈值以下的情况下,在所述相对车速为所述预定值以上的状态开始的开始时刻没有提前所述预定期间以上的情况下,所述通知
部也不向用户通知所述本车辆正在接近所述前方车辆。
14.本公开的第2方案为一种车辆用的通知系统,包括被构成为对从前方车辆到本车辆的车间距离进行测定的距离传感器、被构成为对本车辆所行驶的速度进行测定的车速传感器、界面、以及控制装置,所述控制装置包括处理器、以及存储命令的存储部,所述命令在被所述处理器执行时,使所述控制装置执行以下动作:基于由所述距离传感器测定的所述车间距离、以及由所述车速传感器测定的所述速度,对本车辆的速度相对于前方车辆的速度即相对车速、以及从该本车辆到该前方车辆的车间距离进行确定;以及以在所述车间距离为判定阈值以下,且在所述车间距离成为该判定阈值以下之前的预定期间中,所述相对车速为预定值以上的状态持续为条件,用所述界面向用户通知所述本车辆正在接近所述前方车辆。
15.本公开的第3方案为一种计算机可读取的记录介质,其存储被搭载于车辆的通知装置的计算机可读取的计算机程序,所述计算机程序在被所述计算机执行时,使所述通知装置执行以下步骤:对本车辆的速度相对于前方车辆的速度即相对车速、以及从该本车辆到该前方车辆的车间距离进行确定;以及以在所述车间距离为判定阈值以下,且在所述车间距离成为该判定阈值以下之前的预定期间中,所述相对车速为预定值以上的状态持续为条件,向用户通知所述本车辆正在接近所述前方车辆。
16.发明效果
17.根据本公开,会起到能够抑制警报被误输出这样的效果。
附图说明
18.图1是表示搭载有实施方式的通知装置的本车辆的一例的图。
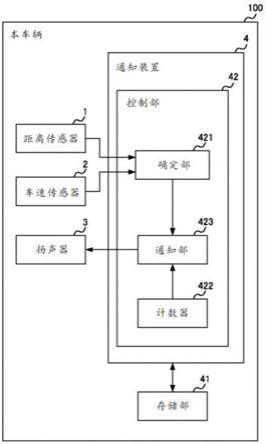
19.图2是表示本车辆的构成的图。
20.图3a是用于对通知部判定是否向用户通知前方车辆的接近的方法进行说明的图,且为表示不向用户通知正在接近前方车辆的例子的图。
21.图3b是用于对通知部判定是否向用户通知前方车辆的接近的方法进行说明的图,且为表示向用户通知正在接近前方车辆的例子的图。
22.图4是表示通知装置向用户通知本车辆正在接近前方车辆的处理顺序的流程图。
23.图5是表示第2实施方式的本车辆的构成的图。
24.图6是表示相对车速与需要向驾驶员通知本车辆正在接近前方车辆的车间距离(在图中,为通知距离)的关系的调查结果的图。
25.图7是对图6的调查结果与算出部所算出的判定阈值进行比较的图。
具体实施方式
26.<第1实施方式>[通知装置的概要]
[0027]
图1是表示搭载有实施方式的通知装置的本车辆100的一例的图。通知装置向用户通知本车辆100正在接近前方车辆200。首先,通知装置对本车辆100与前方车辆200的车间距离d进行确定。此外,通知装置对本车辆100相对于前方车辆200的速度的相对车速进行确定。
[0028]
通知装置对确定的车间距离d是否为预先确定的判定阈值以下进行判定。针对详
情,会在后面叙述,通知装置在判定为车间距离d在判定阈值以下的情况下,对在车间距离d成为判定阈值以下之前的预定期间中的相对车速是否满足预定的要件进行判定。
[0029]
通知装置以相对车速满足预定的要件为条件,向用户通知本车辆100正在接近前方车辆200。通过这样的构成,能够抑制以下的情况:尽管本车辆100与前方车辆200接触的危险性足够低,但通知装置4误输出本车辆100正在接近前方车辆200的通知。
[0030]
[车辆的构成]
[0031]
图2是表示本车辆100的构成的图。本车辆100包括距离传感器1、车速传感器2、扬声器3及通知装置4。通知装置4例如通过ecu(electronic control unit:电子控制单元)来实现,该ecu通过计算机来对本车辆100的各部分进行电子控制。通知装置4包括存储部41及控制部42。
[0032]
距离传感器1对从前方车辆200到本车辆100的车间距离d进行测定。例如,距离传感器1通过对到来自光源的激光在前方车辆200处被反射并在受光部处被接收为止的时间进行测定,从而测定车间距离d。
[0033]
车速传感器2对本车辆100所行驶的速度(也称本车速度)进行测定。例如,车速传感器2基于车轴的转速来测定车速。扬声器3将电信号转换为声音。
[0034]
存储部41例如具有rom(read only memory:只读存储器)及ram(random access memory:随机存取存储器)等存储介质。存储部41存储用于使控制部42发挥功能的各种程序及各种数据。
[0035]
控制部42通过执行被存储于存储部41的程序,从而作为确定部421、计数器422及通知部423来发挥功能。确定部421对距离传感器1所测定的车间距离d进行确定。确定部421对本车辆100相对于前方车辆200的速度的相对车速进行确定。例如,确定部421通过求得车间距离d的每单位时间的变化来确定相对车速。计数器422对时刻进行计测。计数器422向通知部423始终输出计测到的时刻。
[0036]
[正在向前方车辆接近的通知]
[0037]
通知部423以满足以下的(1)及(2)的要件为条件,向用户通知本车辆100正在接近前方车辆200。(1)确定部421所确定的车间距离d为预先确定的判定阈值以下。(2)在车间距离d成为判定阈值以下之前的预定期间中,相对车速为预定值以上的状态持续。
[0038]
通知部423始终对确定部421所确定的相对车速是否为预定值以上进行监视。预定值例如为时速数km。通知部423在确定部421所确定的相对车速为预定值以上的状态开始的时间点,预先取得计数器422所计测的开始时刻。
[0039]
通知部423对确定部421所确定的车间距离d是否为预先确定的判定阈值以下进行判定。通知部423在判定为车间距离d在判定阈值以下的情况下,判定为满足(1)的要件,并对在车间距离d成为判定阈值以下之前的预定期间中,相对车速为预定值以上的状态是否持续进行判定。预定期间例如为比本车辆100的驾驶员临时使速度变化的情况下的时间的平均值更长的时间。具体而言,通知部423在取得了在车间距离d成为判定阈值以下的预定期间以上之前的开始时刻,且相对车速为预定值以上的状态持续的情况下,判定为满足(2)的要件。
[0040]
通知部423例如通过利用扬声器3来输出警报音,从而向用户通知本车辆100正在接近前方车辆200。也可以是,通知部423通过扬声器3来对表示本车辆100正在接近前方车
辆200的消息进行声音输出。在不满足(1)及(2)中的至少一者的情况下,通知部423不会向用户通知本车辆100正在接近前方车辆200。
[0041]
图3a及图3b是用于判定通知部423是否向用户通知前方车辆200的接近的方法进行说明的图。图3a的横轴表示时间,纵轴表示车间距离d。图3a的沿横向延伸的虚线表示判定阈值。在图3a中,曲线的斜率相当于相对车速。相对车速为预定值以上的状态开始的开始时刻s被示出。在图3a的例子中,车间距离d逐渐减少而成为判定阈值以下,因此满足(1)的要件。但是,假设相对车速为预定值以上的状态开始的开始时刻s没有提前预定期间t以上。在该情况下,通知部423判定为不满足(2)的要件,不会向用户通知本车辆100正在接近前方车辆200。
[0042]
图3b表示通知部423向用户通知本车辆100正在接近前方车辆200的情况的例子。图3b的横轴表示时间,纵轴表示车间距离d。在图3b的例子中,车间距离d与图3a相比急剧地降低而成为判定阈值以下。此外,假设相对车速为预定值以上的状态开始的开始时刻s提前预定期间t以上。在该情况下,通知部423判定为满足(1)及(2)这两者的要件,并向用户通知本车辆100正在接近前方车辆200。
[0043]
[要通知的定时的延迟]
[0044]
此外,也可以是,在车间距离d成为判定阈值以下之前的预定期间t中,相对车速为预定值以上的状态未持续的情况下,通知部423使向用户通知本车辆100正在接近前方车辆200的定时延迟。例如,也可以是,在预定期间t中,相对车速为预定值以上的状态未持续的情况下,到车间距离d成为最小阈值以下之前,通知部423不向用户通知前方车辆200的接近。最小阈值为小于判定阈值的值,作为一例,为比在本车辆100追赶前方车辆200的情况下通常设想的车间距离d的下限值更小的值。也可以是,在车间距离d成为最小阈值以下的情况下,无论在预定期间t中相对车速为预定值以上的状态持续与否,通知部423都向用户通知本车辆100正在接近前方车辆200。
[0045]
[使用了加速度的判定]
[0046]
在从前方车辆200观察本车辆100正在加速的状态下,与从前方车辆200观察本车辆100正在减速的状态相比,本车辆100与前方车辆200接触的危险度会变高。因此,也可以是,在相对车速的每单位时间的増加为基准值以上的情况下,通知部423在比相对车速的每单位的増加小于基准值的情况更早的定时,向用户通知本车辆100正在接近前方车辆200。也可以是,通知部423例如以车间距离d成为相当于比判定阈值更长的距离的预备阈值以下作为条件,向用户通知本车辆100正在接近前方车辆200。例如,预备阈值为判定阈值的1.5倍~2倍。基准值例如基于相对车速来确定。
[0047]
[向前方车辆的接近的通知的处理顺序]
[0048]
图4是表示通知装置4向用户通知本车辆100正在接近前方车辆200的处理顺序的流程图。该处理顺序例如在前方车辆200正在本车辆100的前方行驶时开始。
[0049]
首先,确定部421对距离传感器1所测定的车间距离d进行确定。确定部421通过求得确定的车间距离d的每单位时间的变化来确定相对车速(s101)。通知部423算出车间距离d是否为判定阈值以下(s102)。在车间距离d为判定阈值以下的情况下(s102的“是”),通知部423对在车间距离d成为判定阈值以下之前的预定期间t中,相对车速为预定值以上的状态是否持续进行判定(s103)。
[0050]
在车间距离d成为判定阈值以下之前的预定期间t中,相对车速为预定值以上的状态持续的情况下(s103的“是”),通知部423向用户通知本车辆100正在接近前方车辆200(s104),并结束处理。在s102的判定中车间距离d大于判定阈值的情况下(s102的“否”),确定部421回到s101的处理。在s103的判定中,在车间距离d成为判定阈值以下之前的预定期间t中,相对车速为预定值以上的状态未持续的情况下(s103的“否”),确定部421回到s101的处理。
[0051]
[第1实施方式的通知装置的效果]
[0052]
通知部423基于车间距离d、以及在车间距离d成为判定阈值以下之前的预定期间t中的相对车速,向用户通知本车辆100正在接近前方车辆200。通过这样的构成,能够抑制以下情况:在本车辆100正安全地追赶前方车辆200的状态下,车间距离d临时成为判定阈值以下的情况下,通知部423向用户误输出本车辆100正在接近前方车辆200的通知。
[0053]
<第2实施方式>
[0054]
在第1实施方式中,针对判定阈值一定的情况的例子进行了说明。然而,本公开不被限定于此。通知装置例如也可以基于本车速度来算出判定阈值。
[0055]
图5是表示第2实施方式的本车辆100的构成的图。与图2相比,图5的本车辆100还包括算出部500这点是不同的。针对与图2相同的框,标注相同的附图标记,并省略说明。算出部500基于确定部421所确定的本车速度来算出判定阈值。算出部500例如用预先调查到的相对车速与需要向驾驶员通知的车间距离d的关系来算出与本车速度对应的判定阈值。
[0056]
图6是表示相对车速与需要向驾驶员通知本车辆100正在接近前方车辆200的车间距离d(在图中,为通知距离)的关系的调查结果的图。在横轴,示出相对车速,在纵轴,示出通知距离。该调查结果通过以下这样的方法来得到:多个驾驶员回答在测试路线上行驶中感到需要通知本车辆100正在接近前方车辆200的通知距离。
[0057]
图6的多条直线表示本车速度分别为时速20公里、时速40公里、时速60公里及时速90公里的情况的例子。如图6所示,通知距离伴随相对车速的増加而増加。
[0058]
本车速度以时速60km来行驶的本车辆100需要比以时速40km行驶的本车辆100更长的通知距离。因此,可知在相对车速相同的情况下,本车速度较高的一方需要更长的通知距离。
[0059]
算出部500通过以下的方法,将由调查结果示出的通知距离的近似值作为判定阈值来算出。首先,算出部500确定作为基准的判定阈值(以下,也称基准阈值)。基准阈值例如为在调查结果中,与本车辆100正以基准速度行驶的情况对应的通知距离。作为一例,基准速度为时速90km。基准阈值例如为在图6中最小的相对车速所对应的通知距离,但也可以是任意的相对车速所对应的通知距离。算出部500通过将确定的基准阈值乘以基于本车辆100的速度的系数来算出判定阈值。
[0060]
算出部500例如以与图6所示的调查结果的误差最小的方式来确定系数。在本车速度大于基准速度的情况下,算出部500将系数确定为大于1。此外,在本车速度与基准速度相同的情况下,算出部500将系数设为1。在本车速度小于基准速度的情况下,算出部500将系数确定为小于1。
[0061]
图7是对图6的调查结果与算出部500所算出的判定阈值进行比较的图。实线表示算出部500所算出的判定阈值,虚线表示图6的调查结果。在图7中,判定阈值及调查结果均
与图6所示的最小的相对车速对应。如图7所示,随着本车速度变大,算出部500所算出的判定阈值也会变大。判定阈值与调查结果高精度地近似。算出部500将算出的判定阈值向通知部423输出。
[0062]
通过这样的构成,算出部500能够高精度地算出与调查结果近似的判定阈值。此外,也可以是,算出部500基于本车速度与相对车速这两者来确定系数。也可以是,算出部500通过将基准阈值乘以该系数来算出判定阈值。
[0063]
以上,虽然用实施方式对本发明进行了说明,但本发明的技术范围不被限定于上述实施方式所记载的范围,在其主旨的范围内,能够进行各种变形及变更。例如,装置的全部或一部分能够以用任意单位功能性地或物理地进行分散、整合的方式构成。此外,通过多个实施方式的任意组合产生的新的实施方式也被包含在本发明的实施方式中。通过组合产生的新实施方式的效果兼具原实施方式的效果。
[0064]
本技术基于2019年9月27日申请的日本国专利申请(日本特愿2019-176676),并将其内容作为参照援引于此。
[0065]
工业可利用性
[0066]
本发明具有能够抑制警报被误输出这样的效果,对于通知装置、通知系统、及记录介质等是有用的。
[0067]
附图标记说明
[0068]
1 距离传感器
[0069]
2 车速传感器
[0070]
3 扬声器
[0071]
4 通知装置
[0072]
41 存储部
[0073]
42 控制部
[0074]
100 本车辆
[0075]
421 确定部
[0076]
422 计数器
[0077]
423 通知部
[0078]
500 算出部
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。