o型圈机械臂及其上料装置
技术领域
1.本实用新型涉及环形物料转移技术领域,具体涉及一种o型圈机械臂及其上料装置。
背景技术:
2.在各类阀门管道中广泛使用o型圈进行交界面处的密封。电池组件中为了实现电池包在异常情况下的泄压泄流,需要安装溢液阀。溢液阀的安装面需要装配用于与电池壳体实现压力密封的o型圈。在溢液阀的自动化组装中,需要设计合适的上料装置实现o型圈的移转与装入溢液阀。
3.溢液阀的金属壳体上设置有用于与安装面卡接的倒扣形结构,该倒扣形结构同时限制o 型圈在未装配时脱出。由于倒扣形结构的存在,不适合在o型圈扩张不大的情况直接将其压入金属壳体,这样可能造成o型圈在金属的倒扣形结构上划伤,影响使用效果与使用寿命。
4.公开号为cn113385924a的名为“一种密封圈上料机构”的发明申请提供了一种密封圈上料机构,其通过使密封圈弹性套设在取料杆上实现密封圈的移转,通过退料环将密封圈退出。由于其取料杆是整体式的,其端面无内凹空间,因此取料杆无法深入溢液阀的壳体下方位置,只能停止与与金属壳体接触或者略高于金属壳体的位置,此时退料,可能导致o型圈无法套入金属壳体,即使能够套入金属壳体,由于缺少取料杆的防护,o型圈直接在金属壳体的倒扣结构的边缘划过,也可能导致o型圈的表面被划伤。
技术实现要素:
5.针对现有的o型圈上料机构在应用于溢液阀组装时存在的上料不稳定,无法保证o型圈在上料过程中不被破坏的问题,本实用新型提供一种o型圈机械臂及其上料装置。
6.本实用新型的技术方案提供一种o型圈机械臂,其用于o型圈的转移上料,包括:
7.至少三组周向设置的沿安装轴线方向延伸的扩张臂,所述扩张臂能够在周向上同步受控移动;
8.以及滑套,所述滑套具有沿所述安装轴线的通孔,各所述扩张臂自所述通孔中穿过,所述滑套能够沿所述安装轴线移动。
9.优选的,所述扩张臂的内周面至少在所述扩张臂接收所述o型圈的一端端部为同心同半径的圆弧段;所述扩张臂的外周面为同心同半径的圆弧段。
10.优选的,所述滑套的所述通孔内还周向设置有容置所述扩张臂的凹槽。
11.优选的,所述o型圈机械臂还包括气动手指,每个所述扩张臂分别设置在所述气动手指的活动指端。
12.优选的,所述o型圈机械臂还包括伸缩气缸,所述伸缩气缸平行于所述安装轴线设置,所述滑套固定于所述伸缩气缸的活动端。
13.本实用新型的技术方案另外提供一种o型圈上料装置,所述o型圈上料装置包括上
述的o型圈机械臂,所述o型圈机械臂设置在串联的移动组件上。
14.具体的,所述o型圈上料装置包括垂直于安装轴线方向设置的第一移动组件;
15.设置在所述第一移动组件的移动端上的第二移动组件,所述第二移动组件的移动端能够沿所述安装轴线方向移动;
16.所述o型圈机械臂设置在所述第二移动组件的移动端上。
17.本实用新型的o型圈机械臂通过同心扩张的扩张臂可以在张开时将o型圈撑开,一方面在转移o型圈时,可以使o型圈稳定套设在扩张臂上,防止其掉落;另一方面在将o型圈压入溢流阀壳体中时,可以深入壳体靠下位置,避免o型圈组装时与壳体直接接触,以避免划伤。
附图说明
18.图1为本实用新型的o型圈的安装位置示意图;
19.图2为本实用新型的o型圈机械臂的示意图;
20.图3为图2中a处的局部截面示意图;
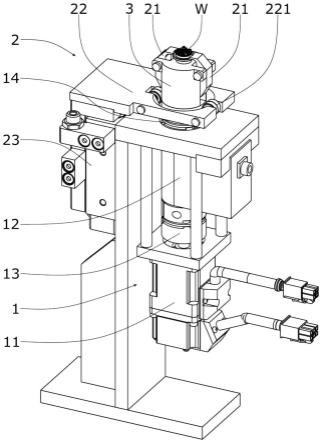
21.图4为本实用新型的o型圈上料装置的示意图。
22.图中,
23.1:机械臂11:扩张臂12:滑套121:通孔122:凹槽13:气动手指14:伸缩气缸 111:外周面112:内周面21:第一移动组件22:第二移动组件s1:取料工位s2:安装工位w:o型圈m:金属壳体m1:金属倒扣o:安装轴线
具体实施方式
24.以下结合附图和具体实施例,对本实用新型进行详细说明,在本说明书中,附图尺寸比例并不代表实际尺寸比例,其只用于体现各部件之间的相对位置关系与连接关系,名称相同或标号相同的部件代表相似或相同的结构,且仅限于示意的目的。
25.本实用新型主要用于图1中的o型圈的上料安装,其安装在金属壳体的根部。安装时需要沿安装轴线从金属壳体的金属倒扣上经过。虽然本o型圈机械臂被设计为优先适用于上述 o型圈的组装,但并不意味着其仅仅适用于该产品的组装。本领域技术人员可以将其移作其他类似产品的转运、组装。
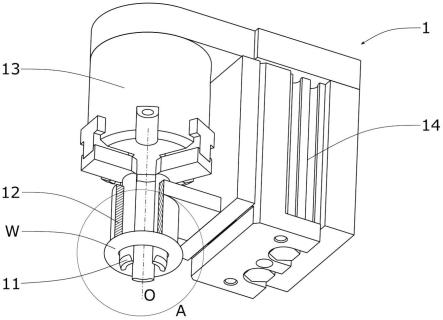
26.如图2所示,本实用新型的o型圈机械臂包括周向设置的沿安装轴线o方向延伸的扩张臂11,扩张臂11至少三组,并能够在周向上作受控移动。在抓取o型圈w时,扩张臂11之间在周向上相对收缩,在扩张臂11伸入o型圈w的内圈时,控制扩张臂11周向向外扩张,使o型圈w弹性套设在扩张臂11上。同时该o型圈机械臂还设置有用于推下o型圈w的滑套12,滑套12具有沿安装轴线o的通孔121,各扩张臂11自通孔121中穿过。则在退料过程中,滑套12在扩张臂11上相对沿安装轴线o移动,将推出扩张臂11,并继续推入壳体上的安装位置,由于扩张臂11之间的相对间隙,扩张臂11可以沿着安装轴线o 进入金属倒扣m1的外围从而避免了o型圈w与金属倒扣m1的直接接触,避免了o型圈 w在金属倒扣m1上被划伤。
27.就图2中的实施例而言,扩张臂11为三组,其围绕着安装轴线o环形设置,所有的扩张臂11均沿着安装轴线o设置在气动手指13上,更准确地说,每个扩张臂11分别设置在气动手指13的活动指端。因此气动手指13可以控制扩张臂11在垂直于安装轴线o的平面内径向
同步外张或者内缩。当扩张臂11内缩时,扩张臂11的外接圆小于安装轴线o的内圈直径,以可以无障碍地处于o型圈w之间。此外,在扩张臂11外张时,o型圈w套设在扩张臂11上,在扩张臂11外张的情况下,其外接圆直径大于o型圈w的直径,o型圈 w发生弹性变形,因此可靠地停留在扩张臂11上,随其移动。
28.在所有扩张臂11的外侧,另套设有滑套12,滑套12具有通孔121(图2为滑套12的局部旋转剖切示意),而扩张臂11则从通孔121内穿过,通孔121的空间是足以提供扩张臂 11沿径向的活动空间的。滑套12固定于伸缩气缸14的活动端,伸缩气缸14平行于安装轴线o设置,因此其活动端自然地驱动滑套12在安装轴线o的外侧沿着安装轴线o滑动。在扩张臂11上套设o型圈w的情况下,滑套12的沿轴滑动将推动o型圈w从扩张臂11 上脱出。
29.图3是图2的a处局部垂直于安装轴线o方向的示意图。扩张臂11均穿过滑套12上沿安装轴线o方向开设的通孔121,通孔121内还周向设置有容置扩张臂11的凹槽122。图 3为扩张臂11的张开状态,此时扩张臂11位于凹槽122中,凹槽122沿安装轴线o将o 型圈w推出时,该凹槽122可以使凹槽122平稳的沿安装轴线o移动,避免滑套12发生径向晃动。
30.如图3所示,所有的扩张臂11的外周面111为同心同半径的圆弧段,以与o型圈w 通过圆弧面接触,避免o型圈w受力不均。所有的扩张臂11的内周面112至少在其接收 o型圈w的一端的端部亦为同心同半径的圆弧段。因此不论是在张开状态还是在收缩状态,由扩张臂11围成的区域中心是中空的。当扩张臂11处于张开状态,o型圈w位于扩张臂 11上,并需要推出扩张臂11再进入金属壳体m的过程中,扩张臂11之间的中空区域,可以用于容置金属壳体m,因此扩张臂11可以下沉至金属壳体m的顶面以下,以将金属倒扣 m1部分或者全部地包含在扩张臂11之间,从而避免o型圈w脱出时,与金属倒扣m1的直接接触,因此避免了o型圈w可能的划伤。
31.基于上述的机械臂1,本实用新型另提供一种o型圈上料装置。在o型圈上料装置中,机械臂1被配置在相互正交串联设置的移动组件上,以实现机械臂1的平面平移。图4为o 型圈上料装置的示意图。该o型圈上料装置在固定的机架上设置有垂直于安装轴线o方向的第一移动组件21,第二移动组件22设置在第一移动组件21的移动端上,第二移动组件 22的移动端则被配置成沿安装轴线o方向移动,机械臂1设置在第二移动组件22的移动端上,通过控制第一移动组件21与第二移动组件22的协调运动可以使机械臂1在取料工位 s1与安装工位s2之间移动完成o型圈w的转移,并在机械臂1的动作下,实现o型圈 w在安装工位s2处的组装。
32.上述内容仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型的权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。