1.本实用新型属于传动系统结构设计技术领域,特别是涉及一种多旋翼式无人机传动机构。
背景技术:
2.多旋翼飞行器由于结构简单、操纵灵活、机动性能好而被广泛应用于侦察、巡逻、信息采集、指挥调度、高效搜救及抢险救灾等。但现有的多旋翼大多都是电机直驱旋翼,通过改变电机转速来控制飞行器的姿态,由于电池能量密度低,使得纯电的多旋翼无人机效率低且机载重量小,续航里程短,大大限制多旋翼往更多方向的应用和发展。
3.目前国内的多旋翼大多起飞重量在5kg~200kg左右,更大的起飞重量在国内基本属于空白,200kg以上的多旋翼使用纯电驱动是不太现实的,因为每台电动机需要较大的体积和重量,因此如采用100kw的发动机,最终可实现最大起飞重量530kg,除了自身的设备重量可以加100kg燃油,续航有5~6h,实用升限3000米,这样的性能可满足的应用场景就大大增加,比如物资运输抛投、电力巡线、地理测绘、察打一体等。而且多旋翼操作简单,相比同量级单旋翼带尾桨直升机所占空间小,适合做舰载机,满足海军装备的要求。
4.因此本实用新型设计了一款多旋翼的传动系统,该传动系统通过一台发动机动力输入,将发动机的功率进行四支分流,通过动力传动轴及膜片联轴器将功率传递至各分支旋翼,经过一级锥齿轮换向减速和一级行星齿轮减速,最终输出至旋翼端,该传动系统可以保持四个旋翼的转速相同,通过改变不同旋翼的总距来实现机动飞行,该传动具有效率高、传递功率高、减速比大等优点,由于发动机作为动力输入源可以使得飞行器具有大载重量和长航时,弥补了电动多旋翼的弊端和缺点。
技术实现要素:
5.本实用新型目的在于通过提供一种多旋翼式无人机的传动机构,解决背景技术中提出的纯电的多旋翼无人机效率低且机载重量小,续航里程短等问题。该传动机构可传递大功率、大减速比以及传动效率高等优点。每个旋翼的转速一致,两分支旋翼正转,两分支旋翼反转,此方法可用来抵消反扭矩,通过改变每个旋翼的总距来实现飞行器的机动飞行。
6.为了实现本实用新型目的,本实用新型公开了一种多旋翼式无人机传动机构,包括发动机、单向离合器、输入齿轮、分流齿轮、膜片联轴器、动力传动轴和分支减速机构;发动机通过单向离合器与输入齿轮相连,单向离合器用于防止旋翼反带发动机;输入齿轮与四个分流齿轮相啮合,分流齿轮处于均布状态,轴夹角为90
°
,四个分流齿轮两两之间的夹角为90
°
;分流齿轮分别通过膜片联轴器与动力传动轴相连,实现分支动力传递,膜片联轴器用于补偿轴向以及角度的偏差;动力传动轴通过膜片联轴器与分支减速机构相连,分支减速机构包括伞齿轮减速器和行星齿轮减速器,动力传动轴连接于伞齿轮减速器,伞齿轮减速器连接于行星齿轮减速器,行星齿轮减速器连接于旋翼;
7.发动机功率和转速通过单向离合器传递给输入齿轮,输入齿轮与四个分流齿轮同
时啮合,实现功率和转速的换向和分流;四个分流齿轮通过膜片联轴器与动力传动轴一端连接,实现功率和转速的远距离传递;动力传动轴另一端通过膜片联轴器与各分支的伞齿轮减速器相连,伞齿轮减速器再次实现功率换向和减速;伞齿轮减速器与行星齿轮减速器相连,功率和转速通过行星齿轮减速器实现大减速比同时增加行星架的扭矩,最终行星架通过桨毂将发动机转速和扭矩传递至旋翼桨叶,通过改变各桨叶总距来控制无人机飞行姿态。
8.进一步地,伞齿轮减速器包括分支输入齿轮和换向减速齿轮,分支输入齿轮和换向减速齿轮皆为伞齿轮,安装轴交角为90
°
,换向减速齿轮连接于行星齿轮减速器,行星齿轮减速器连接于旋翼。
9.进一步地,行星齿轮减速器包括定齿圈、四个行星轮、太阳轮以及行星架;定齿圈、四个行星轮、太阳轮以及行星架同轴设置;四个行星轮和太阳轮设置于定齿圈内部,且太阳轮处于中间,四个行星轮围绕太阳轮处于均布状态;行星轮两两夹角为90
°
,四个行星轮分别与行星架相连,四个行星轮将太阳轮的功率分流然后通过行星架将功率汇合输出。
10.进一步地,单向离合器采用楔块式离合器。
11.进一步地,输入齿轮与四个分流齿轮均为伞齿轮,材料为18cr2ni4wa,输入齿轮与分流齿轮之间采用增速传动,增速比为2-3。
12.进一步地,膜片联轴器的补偿能力为轴向偏移补偿0~3mm,角度偏移补偿0~3
°
。
13.进一步地,动力传动轴的材料采用航空二系铝或者航空七系铝,轴外径35mm~45mm,壁厚1mm~1.5mm。
14.进一步地,分支输入齿轮和换向减速齿轮材料均采用18cr2ni4wa,热处理为渗碳淬火。
15.进一步地,定齿圈、行星轮以及太阳轮的材料均采用32cr3mo1v,热处理采用表面氮化处理,行星架的材料采用tc4钛合金;四个行星轮安装处于均布状态,实现功率的均载传递。
16.进一步地,同一对角线上两个分支的换向减速齿轮安装方向相同,不同对角上换向减速齿轮安装方向相反,用于实现旋翼转速的相反,平衡反扭矩,使飞行器保持稳定。
17.与现有技术相比,本实用新型的显著进步在于:1)该传动机构可实现大功率传递,可靠性高,通过改变每个分支旋翼的总距来实现机动飞行,相比于电机直驱多旋翼机,该传动机构具有更高的效率,较小的控制难度;2)由于该传动机构由发动机驱动,当采用100kw发动机作为动力输入,整机的最大起飞重量可达530kg~550kg,可携带100kg的燃油,因此可实现具有更大载荷飞行,续航里程也可达5h~6h,弥补了电动多旋翼的不足,可实现更多场景的应用;3)多旋翼机型相比于同一量级单旋翼带尾减的直升机,具有更小的尺寸和存储空间,适合作为舰载机使用,满足海军装备的需求,该起飞重量区间的飞机填补了国内外的空白。
18.为更清楚说明本实用新型的功能特性以及结构参数,下面结合附图及具体实施方式进一步说明。
附图说明
19.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,
本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
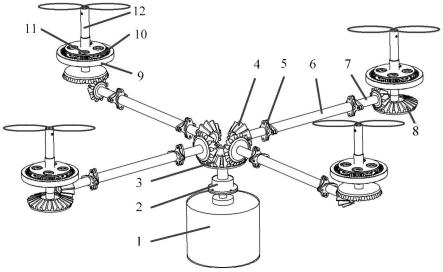
20.图1是一种多旋翼式无人机传动机构的整体示意图;
21.图2是功率分流传动机构示意图;
22.图3是分支减速机构1示意图;
23.图4是分支减速机构2示意图;
24.图5是行星齿轮减速器结构示意图;
25.图6是行星架结构示意图;
26.图中附图标记为:1、发动机,2、单向离合器,3、输入齿轮,4、分流齿轮,5、膜片联轴器,6、动力传动轴,7、分支输入齿轮,8、换向减速齿轮,9、定齿圈,10、行星轮,11、太阳轮,12、行星架。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.如图1所示,一种多旋翼式无人机传动机构包括发动机1、单向离合器2、输入齿轮3、分流齿轮4、膜片联轴器5、动力传动轴6、分支输入齿轮7、换向减速齿轮8、定齿圈9、行星轮10、太阳轮11、行星架12。发动机1通过单向离合器2与输入齿轮3联接,该目的是为了防止旋翼反带发动机1,输入齿轮3与四个分流齿轮4相啮合,此机构可将功率分流为四个分支,分流齿轮4通过膜片联轴器5与动力传动轴6相连接,膜片联轴器5的作用是为了补偿轴向和周向的偏差和位移,动力传动轴6通过膜片联轴器5与分支输入齿轮7相连,实现分支动力输入。分支输入齿轮7和换向减速齿轮8实现一级减速和功率换向。换向减速齿轮8与行星齿轮减速器相连,实现二级减速,行星齿轮减速器中包括了定齿圈9、行星轮10、太阳轮11、和行星架12,行星架12将功率和转速传递至各自旋翼上,其中有两个换向减速齿轮8与另外两个安装方向相反,最终决定旋翼的转向不同,此时可抵消反扭矩,保持飞机的稳定。
29.如图2所示,输入齿轮3与四个分流齿轮4相啮合,分流齿轮4处于均布状态,轴夹角为90
°
,四个分流齿轮4两两之间的夹角为90
°
,输入齿轮3与四个分流齿轮4均为伞齿轮,材料为18cr2ni4wa,该材料为优质低碳钢,采用渗碳淬火提高齿轮表面硬度,实现功率的分流和换向,传递载荷大,传动效率达到97%以上,该处采用增速传动,增速比为2-3,此结构的好处是结构均匀对称,会使飞机具有较好的空气动力学特性。
30.如图3、图4所示,四个分支减速机构中两两相同,该减速机构中均包括一级伞齿轮减速器进行减速及换向和第二级的行星齿轮减速器,伞齿轮减速器有分支输入齿轮7和换向减速齿轮8,两者皆为伞齿轮,安装轴交角为90
°
,齿轮材料采用18cr2ni4wa,热处理为渗碳淬火。行星减速机构中包括了定齿圈9、四个行星轮10、太阳轮11以及行星架12。太阳轮11、行星轮10以及定齿圈9材料均采用32cr3mo1v,热处理采用表面氮化处理;行星架12的材料采用tc4,不仅强度大且重量小,大大提高飞机功重比。四个行星轮10安装处于均布状态,实现功率的均载传递。该减速机构可实现较大的减速比,减速比为8-10。其中同一对角线上
两个分支的换向减速齿轮8安装方向相同,不同对角上换向减速齿轮8安装方向相反,此目的是为了实现旋翼转速的相反,平衡反扭矩,使飞行器保持稳定。该传动机构可保持四个旋翼转速一致,通过改变每个分支旋翼的总距来实现机动飞行,降低飞机飞行控制难度。
31.如图5、图6所示,定齿圈9、四个行星轮10、太阳轮11以及行星架12同轴设置;四个行星轮10和太阳轮11设置于定齿圈9内部,且太阳轮11处于中间,四个行星轮10围绕太阳轮11处于均布状态;行星轮10两两夹角为90
°
,四个行星轮10分别与行星架12相连,四个行星轮10将太阳轮11的功率分流然后通过行星架12将功率汇合输出。
32.具体地,在本实施例中,单向离合器2采用楔块式离合器。膜片联轴器5的补偿能力为轴向偏移补偿0~3mm,角度偏移补偿0~3
°
。
33.具体地,在本实施例中,动力传动轴6的材料采用航空二系铝或者航空七系铝,轴外径35mm~45mm,壁厚1mm~1.5mm。动力传动轴6的传动效率可达95%以上,动力传动轴6末端连接分支减速齿轮7,换向减速齿轮8相与行星齿轮减速器相连,实现大减速比同时增加行星架12输出扭矩,最终将发动机功率传递至旋翼,整个传动系统的传递功率达到90%以上。
34.本装置工作原理及流程为:发动机1功率和转速通过单向离合器2传递给输入齿轮3,输入齿轮3与四个分流齿轮4同时啮合,实现功率和转速的换向和分流;四个分流齿轮4通过膜片联轴器5与动力传动轴6一端连接,实现功率和转速的远距离传递;动力传动轴6另一端通过膜片联轴器5与各分支的伞齿轮减速器相连,伞齿轮减速器再次实现功率换向和减速;伞齿轮减速器与行星齿轮减速器相连,功率和转速通过行星齿轮减速器实现大减速比同时增加行星架12的扭矩,最终行星架12通过桨毂将发动机1转速和扭矩传递至旋翼桨叶,通过改变各桨叶总距来控制无人机飞行姿态。
35.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。