技术特征:
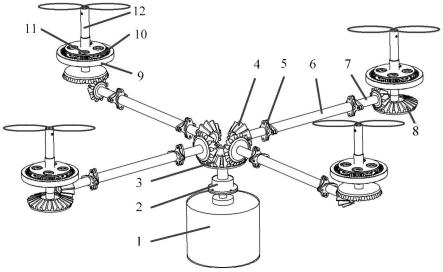
1.一种多旋翼式无人机传动机构,其特征在于,包括发动机(1)、单向离合器(2)、输入齿轮(3)、分流齿轮(4)、膜片联轴器(5)、动力传动轴(6)和分支减速机构;所述发动机(1)通过单向离合器(2)与输入齿轮(3)相连,所述单向离合器(2)用于防止旋翼反带发动机(1);所述输入齿轮(3)与四个分流齿轮(4)相啮合,所述分流齿轮(4)处于均布状态,轴夹角为90
°
,四个分流齿轮(4)两两之间的夹角为90
°
;所述分流齿轮(4)分别通过膜片联轴器(5)与动力传动轴(6)相连,实现分支动力传递,所述膜片联轴器(5)用于补偿轴向以及角度的偏差;所述动力传动轴(6)通过膜片联轴器(5)与分支减速机构相连,分支减速机构包括伞齿轮减速器和行星齿轮减速器,动力传动轴(6)连接于伞齿轮减速器,伞齿轮减速器连接于行星齿轮减速器,行星齿轮减速器连接于旋翼。2.根据权利要求1所述的一种多旋翼式无人机传动机构,其特征在于,所述伞齿轮减速器包括分支输入齿轮(7)和换向减速齿轮(8),分支输入齿轮(7)和换向减速齿轮(8)皆为伞齿轮,安装轴交角为90
°
,换向减速齿轮(8)连接于行星齿轮减速器,行星齿轮减速器连接于旋翼。3.根据权利要求1所述的一种多旋翼式无人机传动机构,其特征在于,所述行星齿轮减速器包括定齿圈(9)、四个行星轮(10)、太阳轮(11)以及行星架(12);定齿圈(9)、四个行星轮(10)、太阳轮(11)以及行星架(12)同轴设置;四个行星轮(10)和太阳轮(11)设置于定齿圈(9)内部,且太阳轮(11)处于中间,四个行星轮(10)围绕太阳轮(11)处于均布状态;行星轮(10)两两夹角为90
°
,四个行星轮(10)分别与行星架(12)相连,四个行星轮(10)用于将太阳轮(11)的功率分流然后通过行星架(12)将功率汇合输出。4.根据权利要求1所述的一种多旋翼式无人机传动机构,其特征在于,所述单向离合器(2)采用楔块式离合器。5.根据权利要求1所述的一种多旋翼式无人机传动机构,其特征在于,输入齿轮(3)与四个分流齿轮(4)均为伞齿轮,材料为18cr2ni4wa,输入齿轮(3)与分流齿轮(4)之间采用增速传动,增速比为2-3。6.根据权利要求1所述的一种多旋翼式无人机传动机构,其特征在于,所述膜片联轴器(5)的补偿能力为轴向偏移补偿0~3mm,角度偏移补偿0~3
°
。7.根据权利要求1所述的一种多旋翼式无人机传动机构,其特征在于,所述动力传动轴(6)的材料采用航空二系铝或者航空七系铝,轴外径35mm~45mm,壁厚1mm~1.5mm。8.根据权利要求2所述的一种多旋翼式无人机传动机构,其特征在于,所述分支输入齿轮(7)和换向减速齿轮(8)材料均采用18cr2ni4wa,热处理为渗碳淬火。9.根据权利要求3所述的一种多旋翼式无人机传动机构,其特征在于,所述定齿圈(9)、行星轮(10)以及太阳轮(11)的材料均采用32cr3mo1v,热处理采用表面氮化处理,行星架(12)的材料采用tc4。10.根据权利要求2所述的一种多旋翼式无人机传动机构,其特征在于,同一对角线上两个分支的换向减速齿轮(8)安装方向相同,不同对角上换向减速齿轮(8)安装方向相反。
技术总结
本申请公开了一种多旋翼式无人机传动机构,发动机通过单向离合器与输入齿轮相连,输入齿轮与四个分流齿轮相啮合,分流齿轮分别通过膜片联轴器与动力传动轴相连,动力传动轴通过膜片联轴器与分支减速机构相连,分支减速机构包括伞齿轮减速器和行星齿轮减速器,动力传动轴连接于伞齿轮减速器,伞齿轮减速器连接于行星齿轮减速器,行星齿轮减速器连接于旋翼。本传动机构可实现大功率传递,可靠性高,通过改变每个分支旋翼的总距来实现机动飞行;相比于电机直驱多旋翼机,具有更高的效率,较小的控制难度,可实现具有更大载荷飞行,满足更多场景的应用;相比于同一量级单旋翼带尾减的直升机,具有更小的尺寸和存储空间,适合作为舰载机使用。载机使用。载机使用。
技术研发人员:高鹏 闫卫平 杨红图 杨长盛 刘士明 王永辉 杨敏
受保护的技术使用者:中国人民解放军总参谋部第六十研究所
技术研发日:2022.10.27
技术公布日:2023/2/10
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。