1.本实用新型涉及管道勘探机器人技术领域,具体为一种管道勘探机器人的驱动装置。
背景技术:
2.管道机器人是一种可沿细小管道内部或外部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统,管道勘探机器人在作业时需要用到驱动装置,现有的驱动装置结构较为简单,行驶方式较为单一,在作业时遇到管道内有水时无法对勘探机器人进行驱动移动,因此我们提出一种管道勘探机器人的驱动装置。
3.经检索,专利公告号为cn201902765u公开了一种管道机器人驱动机构,它由均位于管道内的前部机架和后部机架组成,前部机架和后部机架通过万向节连接;所述的前部机架和后部机架均设有位于管道中心的机架筒和铰接在机架筒外圆周上以120度布置的三组只能单向运动的行走结构,在后部机架内固定有气缸,所述的气缸通过曲柄连杆机构连接固定在后部机架筒内的电机,所述的气缸活塞杆外端与万向节连接;所述的第一铰接点和第二铰接点不在同一平面内,所述的第三铰接点和第四铰接点也不在同一平面内,现有的技术中cn201902765u在使用的过程中的结构较为简单,行驶方式较为单一,在作业时遇到管道内有水时无法对勘探机器人进行驱动移动,同时在驱动装置在倾斜状态下行驶时不具备对机器人的水平进行补偿的功能,从而当驱动装置倾斜角度过大时会造成机器人侧翻的情况,鉴于此我们提出一种管道勘探机器人的驱动装置来解决现有的问题。
技术实现要素:
4.本实用新型的目的在于提供一种管道勘探机器人的驱动装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种管道勘探机器人的驱动装置,包括船体和主坐体,所述船体两侧的前侧转动安装有驱动轮,且船体两侧的后侧转动安装有随动轮,所述驱动轮和随动轮的外壁套设有驱动履带,且驱动履带的外壁等距离设置有多组防滑凸起,所述船体内部的后侧设置有安装槽,且安装槽的上方固定安装有调节电机,所述调节电机的输出端贯穿安装槽固定连接有舵板,所述主坐体底部中央位置处的前侧与后侧固定安装有支撑板,所述船体的内部设置有两组电动推杆,所述船体的内部固定安装有固定板,且固定板的顶部固定安装有水平传感器。
6.使用本技术方案的一种管道勘探机器人的驱动装置,船体两侧的前侧转动安装有驱动轮,且船体背部两侧的后侧转动安装有随动轮,驱动轮与随动轮的外壁套设有驱动履带,驱动轮通过转动可以带动驱动履带与随动轮进行转动,从而可以对装置通过履带的方式进行驱动移动,驱动履带的外壁等距离设置有多防滑凸起,防滑凸起增加了驱动履带表面的摩擦力,提高了驱动履带转动时的抓地力,船体可以在有水的管道内漂浮在水面上,同
时通过驱动履带与防滑凸起可以对装置在水面上进行移动,从而便于装置对机器人在有水的管道内进行移动,增加了装置在对机器人驱动的方式,降低了局限性,船体内部的后侧设置有安装槽,且安装槽的上方固定安装有调节电机,调节电机的输出端贯穿安装槽固定连接有舵板,调节电机可以带动舵板进行转动调节,从而通过舵板可以对装置在水面上驱动移动时的方向进行控制,主坐体可以对机器人进行安装固定,且主坐体底部中央位置处的前侧与后侧固定安装有支撑板,支撑板通过轴杆转动安装在船体内壁的前侧与后侧,通过支撑板可以对主坐体固定安装在船体的顶部,水平传感器通过固定板安装在船体的内部,水平传感器可以对装置在管道内驱动移动时的倾斜度进行测量,船体内部的两侧设置有电动推杆,电动推杆可以对主坐体的两侧进行支撑,同时装置内部的控制机构可以根据水平传感器检测的数据对电动推杆进行自动控制,从而跟水平传感器检测的数据对主坐体与机器人的水平度进行补偿。
7.优选的,所述驱动轮和随动轮的外壁等距离设置有多组驱动齿牙,且驱动履带的内壁等距离设置有多组驱动槽。驱动齿牙与驱动槽配合增加了驱动轮带动驱动履带转动时的稳定性,避免了使用时出现打滑的情况。
8.优选的,所述船体的内部设置有密封罩,且密封罩的内部固定安装有单片机。密封罩可以对单片机进行密封安装保护,同时单片机通过导线与水平传感器、电动推杆连接,从而通过单片机可以根据水平传感器检测的数据通过电动推杆对主坐体的水平进行补偿作业。
9.优选的,所述电动推杆的底部活动安装有安装座,且电动推杆的输出端活动安装有连接座。安装座可以对电动推杆的底部活动安装有,连接座可以对电动推杆与主坐体进行活动连接。
10.优选的,所述船体内部前侧的两侧固定安装有传动机构,且传动机构的内侧固定安装有驱动电机。驱动电机与传动机构配合可以对驱动轮进行转动,从而可以对装置驱动移动。
11.优选的,所述主坐体底部的四周固定连接有风琴罩,且主坐体顶部的四周设有安装孔。风琴罩可以对主坐体与船体之间进行闭合密封保护,安装孔便于螺栓对勘探机器人进行安装固定。
12.与现有技术相比,本实用新型的有益效果是:
13.1、通过设置船体与驱动轮、随动轮、驱动履带、防滑凸起、调节电机、舵板配合,驱动轮与随动轮可以对装置进行支撑,同时驱动履带可采用履带驱动方式对装置与勘探机器人进行移动,防滑凸起增加了驱动履带外部的摩擦力,同时通过船体可以在遇到管道内有水时可以对机器人进行漂浮,从而便于装置对勘探机器人在有水的管道内进行驱动,增加了装置对机器人驱动的方式,调节电机带动舵板转动可以对装置在水面上行驶的方向进行调节控制。
14.2、通过设置主坐体与水平传感器、电动推杆、单片机配合,主坐体可以对勘探机器人进行安装固定,同时通过水平传感器可以对装置在管道内移动时水平度进行检测,电动推杆对主坐体作业时的水平度进行调节,单片机可以根据水平传感器对电动推杆进行控制,从而可以对装置在管道内倾斜驱动时对主坐体与机器人进行水平补偿,使得装置更加设有,扩大了适用范围。
附图说明
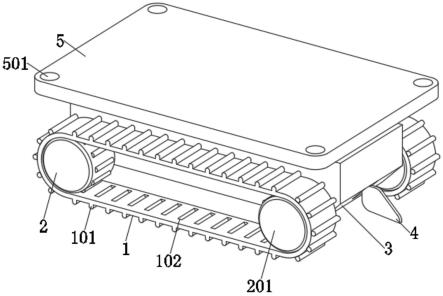
15.图1为本实用新型的立体图;
16.图2为本实用新型的内部结构示意图;
17.图3为本实用新型的俯视结构示意图;
18.图4为本实用新型的主坐体底部结构示意图。
19.图中:1、驱动履带;101、防滑凸起;102、驱动槽;2、驱动轮;201、随动轮;202、驱动齿牙;3、船体;301、安装槽;302、密封罩;4、舵板;5、主坐体;501、安装孔;502、支撑板;503、风琴罩;6、电动推杆;601、连接座;602、安装座;7、驱动电机;701、传动机构;8、水平传感器;801、固定板;9、单片机;10、调节电机。
具体实施方式
20.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
21.实施例一
22.如图1、图2、图3和图4所示,本实用新型提出的一种管道勘探机器人的驱动装置,包括船体3和主坐体5,船体3两侧的前侧转动安装有驱动轮2,且船体3两侧的后侧转动安装有随动轮201,驱动轮2和随动轮201的外壁套设有驱动履带1,且驱动履带1的外壁等距离设置有多组防滑凸起101,船体3内部的后侧设置有安装槽301,且安装槽301的上方固定安装有调节电机10,调节电机10的输出端贯穿安装槽301固定连接有舵板4,主坐体5底部中央位置处的前侧与后侧固定安装有支撑板502,船体3的内部设置有两组电动推杆6,船体3的内部固定安装有固定板801,且固定板801的顶部固定安装有水平传感器8。
23.基于实施例1的管道勘探机器人的驱动装置工作原理是:船体3两侧的前侧转动安装有驱动轮2,且船体3背部两侧的后侧转动安装有随动轮201,驱动轮2与随动轮201的外壁套设有驱动履带1,驱动轮2通过转动可以带动驱动履带1与随动轮201进行转动,从而可以对装置通过履带的方式进行驱动移动,驱动履带1的外壁等距离设置有多防滑凸起101,防滑凸起101增加了驱动履带1表面的摩擦力,提高了驱动履带1转动时的抓地力,船体3可以在有水的管道内漂浮在水面上,同时通过驱动履带1与防滑凸起101可以对装置在水面上进行移动,从而便于装置对机器人在有水的管道内进行移动,增加了装置在对机器人驱动的方式,降低了局限性,船体3内部的后侧设置有安装槽301,且安装槽301的上方固定安装有调节电机10,调节电机10的型号可为:ys-50-70ktyz型,调节电机10的输出端贯穿安装槽301固定连接有舵板4,调节电机10可以带动舵板4进行转动调节,从而通过舵板4可以对装置在水面上驱动移动时的方向进行控制,主坐体5可以对机器人进行安装固定,且主坐体5底部中央位置处的前侧与后侧固定安装有支撑板502,支撑板502通过轴杆转动安装在船体3内壁的前侧与后侧,通过支撑板502可以对主坐体5固定安装在船体3的顶部,水平传感器8通过固定板801安装在船体3的内部,水平传感器8可以对装置在管道内驱动移动时的倾斜度进行测量,水平传感器8的型号可为:bwk218型,船体3内部的两侧设置有电动推杆6,电动推杆6可以对主坐体5的两侧进行支撑,同时装置内部的控制机构可以根据水平传感器8检测的数据对电动推杆6进行自动控制,从而跟水平传感器8检测的数据对主坐体5与机器人的水平度进行补偿。
24.实施例二
25.如图1、图2、图3和图4所示,本实用新型提出的一种管道勘探机器人的驱动装置,相较于实施例一,本实施例还包括:驱动轮2和随动轮201的外壁等距离设置有多组驱动齿牙202,且驱动履带1的内壁等距离设置有多组驱动槽102,船体3的内部设置有密封罩302,且密封罩302的内部固定安装有单片机9,电动推杆6的底部活动安装有安装座602,且电动推杆6的输出端活动安装有连接座601,船体3内部前侧的两侧固定安装有传动机构701,且传动机构701的内侧固定安装有驱动电机7,主坐体5底部的四周固定连接有风琴罩503,且主坐体5顶部的四周设有安装孔501。
26.本实施例中,如图1和图2、图3所示,驱动齿牙202与驱动槽102配合增加了驱动轮2带动驱动履带1转动时的稳定性,避免了使用时出现打滑的情况;如图3所示,密封罩302可以对单片机9进行密封安装保护,同时单片机9通过导线与水平传感器8、电动推杆6连接,从而通过单片机9可以根据水平传感器8检测的数据通过电动推杆6对主坐体5的水平进行补偿作业;如图4所示,安装座602可以对电动推杆6的底部活动安装有,连接座601可以对电动推杆6与主坐体5进行活动连接;如图3所示,驱动电机7与传动机构701配合可以对驱动轮2进行转动,从而可以对装置驱动移动;如图4所示,风琴罩503可以对主坐体5与船体3之间进行闭合密封保护,安装孔501便于螺栓对勘探机器人进行安装固定。
27.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。