一种电动汽车的smc蠕行控制
技术领域
1.本发明涉及汽车电子电器技术领域,尤其涉及一种电动汽车的smc蠕行控制。
背景技术:
2.电动汽车的蠕行控制功能是为了满足驾驶员对低速行驶且可控的要求,速度越快速平稳接近目标车速表明该控制算法越好。当前的蠕行多数基于pi控制,存在一些速度超调与响应慢的问题,且pi加速度控制算法的计算量大。基于目标车速的smc蠕行控制可改善速度超调与速度响应问题,使车速更快速平稳的贴近目标车速,改善驾驶感受;同时降低主控芯片的计算负载。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供一种电动汽车的smc蠕行控制,能够基于目标车速的smc蠕行控制可解决车速超调与响应慢的问题,使车速快速平稳的贴近目标车速,改善驾驶感受;同时降低主控芯片的计算负载。
4.为了实现本发明的目的,本发明采用的技术方案为:
5.本发明公开了一种电动汽车的smc蠕行控制,包括如下步骤,
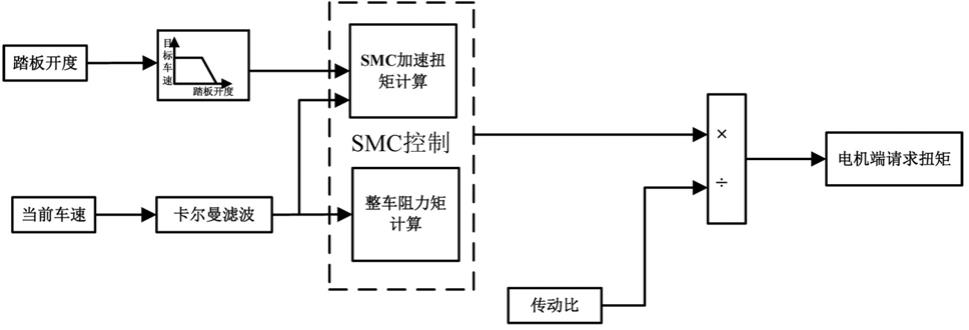
6.s1,蠕行目标车速计算:将vcu采集的加速踏板和制动踏板合成一个开度值(-100%-100%),其中-100%~0%为制动踏板开度,0%~100%为加速踏板开度,并根据合成踏板开度查表获取当前合成踏板开度下的对应蠕行目标车速;
7.s2,实际车速计算:因vcu通过can网络接收abs发出的车速存在噪声和干扰,需对接收到的车速信号进行卡尔曼滤波处理,使车速平顺输出;
8.s3,smc加速扭矩计算:用smc控制算法计算蠕行加速扭矩;
9.s4,整车阻力矩计算;
10.s5,蠕行请求扭矩计算:将smc计算的加速扭矩与整车阻力矩相加得出蠕行请求扭矩;
11.s6,电机端请求扭矩输出计算:蠕行请求扭矩值除以传动比作为电机端请求扭矩。
12.所述步骤s3中smc加速扭矩计算包括
13.smc滑膜面切换函数的计算:将合成踏板开度获取的蠕行目标车速v
targ
和当前的实际车速v进行差值作为smc控制的变结构的切换函数为:s=v-v
targ
;
14.smc的趋近率计算:选取指数趋近率与等速趋近率使车速快速平稳的接近目标值,趋近率函数为:其中k1、k1和α均为大于0的系数;
15.加速扭矩计算:根据趋近率函数可得出加速请求扭矩为:t
acc
=mr(-k1tanh(s)-k2|s|
α
tanh(s)),其中m为整车质量,r为车轮半径。
16.所述步骤s4中,整车阻力包括滚动阻力、风阻和坡道阻力,整车阻力计算如下式
[0017][0018]
将整车阻力乘以车轮半径得出整车阻力矩,其中μ为滚动阻力系数,g为中力加速度,cd为风阻系数,a为迎风面积,v为车速,θ为坡度。
[0019]
本发明的有益效果在于:
[0020]
(1)本发明优化了因合成踏板变化造成的加速度突变影响驾驶感;
[0021]
(2)本发明可使当前车速快速平稳的接近目标车速,优化速度超调与响应问题;
[0022]
(3)本发明可移植性较好,无需额外的实车标定。
附图说明
[0023]
图1为本发明的流程示意图;
[0024]
图2为本发明中某款电动汽车基于pi蠕行控制的示意图;
[0025]
图3为本发明中某款电动汽车基于smc蠕行控制的示意图。
具体实施方式
[0026]
下面对本发明进一步说明:
[0027]
请参阅图1-3,
[0028]
本发明公开了一种电动汽车的smc蠕行控制,包括如下步骤,
[0029]
s1,在行车模式下vcu通过硬线采集车辆当前加速踏板开度和制动踏板开度的信号,进行d/a转换后,将加速踏板和制动踏板合成一个开度值(-100%-100%),并根据合成的踏板开度查表1获取d/r档蠕行的目标车速;
[0030]
表1
[0031]
二和一踏板开度【%】-25-20-10-501d档蠕行目标车速【km/h】023466r档蠕行目标车速【km/h】002344
[0032]
s2,实际车速计算:因vcu通过can网络接收abs发出的车速存在噪声和干扰,需对接收到的车速信号进行卡尔曼滤波处理,使车速平顺输出;
[0033]
s3,smc加速扭矩计算:用smc控制算法计算蠕行加速扭矩;
[0034]
s4,整车阻力矩计算;
[0035]
s5,蠕行请求扭矩计算:将smc计算的加速扭矩与整车阻力矩相加得出蠕行请求扭矩;
[0036]
s6,电机端请求扭矩输出计算:蠕行请求扭矩值除以传动比作为电机端请求扭矩。
[0037]
所述步骤s3中smc加速扭矩计算包括
[0038]
smc滑膜面切换函数的计算:将合成踏板开度获取的蠕行目标车速v
targ
和当前的实际车速v进行差值作为smc控制的变结构的切换函数为:s=v-v
targ
;
[0039]
smc的趋近率计算:选取指数趋近率与等速趋近率使车速快速平稳的接近目标值,趋近率函数为:其中k1、k1和α均为大于0的系数;
[0040]
加速扭矩计算:根据趋近率函数可得出加速请求扭矩为:t
acc
=mr(-k1tanh(s)-k2|
s|
α
tanh(s)),其中m为整车质量,r为车轮半径。
[0041]
所述步骤s4中,整车阻力包括滚动阻力、风阻和坡道阻力,整车阻力计算如下式
[0042][0043]
将整车阻力乘以车轮半径得出整车阻力矩,其中μ为滚动阻力系数,g为中力加速度,cd为风阻系数,a为迎风面积,v为车速,θ为坡度。
[0044]
实施例:
[0045]
如图2和3所示,为某款电动汽车基于pi蠕行控制与smc蠕行控制的仿真对比图,
[0046]
图2为pi蠕行控制,可以看出整体扭矩较为平顺,速度存在较小的超调问题,加速度在第70s时松开制动踏板存在较大的波动,影响驾驶感;
[0047]
图3为smc蠕行控制,其整体的扭矩变化平顺,速度能够快速平稳的贴近目标车速,加速度在第70s时松开制动踏板也较为平稳。
[0048]
由此,smc蠕行控制优化了因合成踏板变化造成的加速度突变影响驾驶感;可使当前车速快速平稳的接近目标车速,优化速度超调与响应问题;可移植性较好,无需额外的实车标定。
[0049]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种电动汽车的smc蠕行控制,其特征在于:包括如下步骤,s1,蠕行目标车速计算:将vcu采集的加速踏板和制动踏板合成一个开度值(-100%-100%),其中-100%~0%为制动踏板开度,0%~100%为加速踏板开度,并根据合成踏板开度查表获取当前合成踏板开度下的对应蠕行目标车速;s2,实际车速计算:因vcu通过can网络接收abs发出的车速存在噪声和干扰,需对接收到的车速信号进行卡尔曼滤波处理,使车速平顺输出;s3,smc加速扭矩计算:用smc控制算法计算蠕行加速扭矩;s4,整车阻力矩计算;s5,蠕行请求扭矩计算:将smc计算的加速扭矩与整车阻力矩相加得出蠕行请求扭矩;s6,电机端请求扭矩输出计算:蠕行请求扭矩值除以传动比作为电机端请求扭矩。2.根据权利要求1所述的一种电动汽车的smc蠕行控制,其特征在于:所述步骤s3中smc加速扭矩计算包括smc滑膜面切换函数的计算:将合成踏板开度获取的蠕行目标车速v
targ
和当前的实际车速v进行差值作为smc控制的变结构的切换函数为:s=v-v
targ
;smc的趋近率计算:选取指数趋近率与等速趋近率使车速快速平稳的接近目标值,趋近率函数为:其中k1、k1和α均为大于0的系数;加速扭矩计算:根据趋近率函数可得出加速请求扭矩为:t
acc
=mr(-k1tanh(s)-k2|s|
α
tanh(s)),其中m为整车质量,r为车轮半径。3.根据权利要求1所述的一种电动汽车的smc蠕行控制,其特征在于:所述步骤s4中,整车阻力包括滚动阻力、风阻和坡道阻力,整车阻力计算如下式将整车阻力乘以车轮半径得出整车阻力矩,其中μ为滚动阻力系数,g为中力加速度,c
d
为风阻系数,a为迎风面积,v为车速,θ为坡度。
技术总结
本发明涉及汽车电子电器技术领域,尤其涉及一种电动汽车的SMC蠕行控制,包括如下步骤,S1,蠕行目标车速计算;S2,实际车速计算:因VCU通过CAN网络接收ABS发出的车速存在噪声和干扰,需对接收到的车速信号进行卡尔曼滤波处理,使车速平顺输出;S3,SMC加速扭矩计算:用SMC控制算法计算蠕行加速扭矩;S4,整车阻力矩计算;S5,蠕行请求扭矩计算:将SMC计算的加速扭矩与整车阻力矩相加得出蠕行请求扭矩;S6,电机端请求扭矩输出计算:蠕行请求扭矩值除以传动比作为电机端请求扭矩。本发明优化了因合成踏板变化造成的加速度突变影响驾驶感;可使当前车速快速平稳的接近目标车速,优化速度超调与响应问题;可移植性较好,无需额外的实车标定。标定。标定。
技术研发人员:屈芳宇 蔡小龙 刘伟东 邓海燕
受保护的技术使用者:江铃汽车股份有限公司
技术研发日:2021.11.29
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。